实验二-Simulink仿真实验
matlab中Simulink 的仿真实验报告
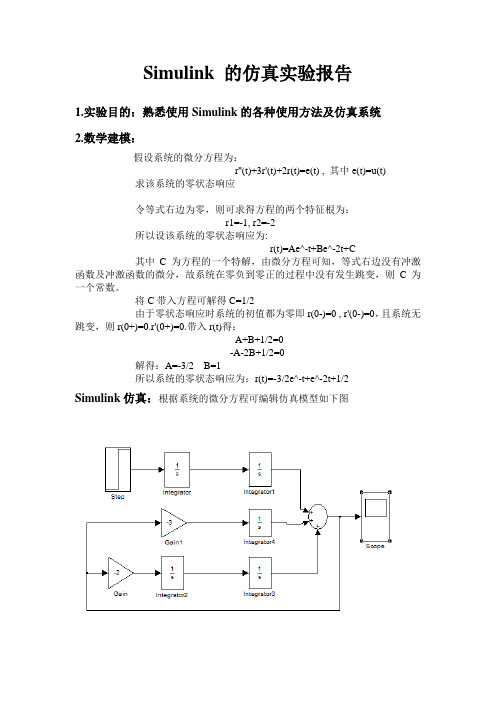
Simulink 的仿真实验报告1.实验目的:熟悉使用Simulink的各种使用方法及仿真系统2.数学建模:假设系统的微分方程为:r''(t)+3r'(t)+2r(t)=e(t) , 其中e(t)=u(t)求该系统的零状态响应令等式右边为零,则可求得方程的两个特征根为:r1=-1, r2=-2所以设该系统的零状态响应为:r(t)=Ae^-t+Be^-2t+C其中C为方程的一个特解,由微分方程可知,等式右边没有冲激函数及冲激函数的微分,故系统在零负到零正的过程中没有发生跳变,则C为一个常数。
将C带入方程可解得C=1/2由于零状态响应时系统的初值都为零即r(0-)=0 , r'(0-)=0,且系统无跳变,则r(0+)=0.r'(0+)=0.带入r(t)得:A+B+1/2=0-A-2B+1/2=0解得:A=-3/2 B=1所以系统的零状态响应为:r(t)=-3/2e^-t+e^-2t+1/2Simulink仿真:根据系统的微分方程可编辑仿真模型如下图打开开始按键,可以得到波形图:验证仿真结果:由前面得到的系统零状态响应结果:r(t)=-3/2e^-t+e^-2t+1/2可编辑仿真模型:>> t=(0:0.1:10);>> plot(t,((-3)/2)*exp((-1)*t)+exp((-2)*t)+1/2)实验结论:Simulink仿真结果和函数仿真结果基本一致,所以simulink仿真是正确的。
实验心得:1.此实验是利用matlab对一个微分方程进行建模求解,既要求我们掌握对微分方程的求解,又要求掌握用matlab对微分方程进行建模,所以要求我们对软件得熟悉。
2.信号与系统的实验主要是用matlab分析或验证书上的东西,前提当然是学好书本上的知识,再学好matlab这个软件。
3.用simulink仿真的时候,对函数用积分器较好,不知为什么用微分器做不出来,报错显示不出图形。
实验二、SIMULINK仿真(报告完整版)
由两种方法可以看出,运用函数编程编写代码进行试验时比较麻烦,调试比较
麻烦,但是运用 SIMULINK 模型来搭建系统,可视化比较好,而且在调试参数 时可以很简单的进行调整,即调试系统是比较简单。
SIULINK 模型与现实中的方框图的整体结构很相似,运用起来更加简单。因此在
进行控制模型调试过程最好运用 SIMULINK 方法。 3. 蹦极跳的数学模型为:
系统的 SIMULINK 模型如图(9)所示:
图(9)
x(t),x'(t)的曲线波形如图(10)所示:
图(10)
4. 建立单闭环调速系统的 SIMULINK 模型,并对 PID 控制器进行封装和对 P,I,D 参数进行设置。
单闭环调速系统的 SIMULINK 模型如图(11)所示,其中各个模块的参数可以再模
图(5)
(2)将(1)中的开环传递函数转换为状态空间模型。
实验代码:
[A,B,C,D]=tf2ss(1,[1 0.6 0])
执行结果:
A = -0.6000 1.0000 B = 1 0 C = 0 0
0 D = 0
1
2. 系统的微分方程为: x x(r ay ) y y (d bx) 设 r=1,d=0.5,a=0.1,b=0.02,x(0)=25,y(0)=2 1) 利用 MATLAB 所提供的函数,编写求解上述微分方程的 M 文件,求出 x(t),y(t);
mx mg b( x) x a1 x a2 x x
Kx x 0 b( x ) x0 0 其中 m 为物体的质量,g 为重力加速度,x 为物体的位置,第二项表示绳索的 弹力,K 为绳索的弹性系数,第三项和第四项表示空气的阻力。 设蹦极者的初始位置为 x(0)= -30, 起始速度为 x(0)'=0; 其余的参数为 a1=a2=1, m=70mg,g=10m/s2.试建立系统的 SIMULINK 模型,并给出 x(t),x'(t)的曲线波形
simulink仿真实验报告
simulink仿真实验报告Simulink仿真实验报告一、引言Simulink是一种基于模型的设计和仿真工具,广泛应用于各领域的工程设计和研究中。
本次实验将利用Simulink进行系统仿真实验,通过搭建模型、参数调整、仿真运行等过程,验证系统设计的正确性和有效性。
二、实验目的本实验旨在帮助学生掌握Simulink的基本使用方法,了解系统仿真的过程和注意事项。
通过本实验,学生将能够:1. 熟悉Simulink的界面和基本操作;2. 理解和掌握模型构建的基本原理和方法;3. 学会调整系统参数、运行仿真和分析仿真结果。
三、实验内容本实验分为以下几个步骤:1. 绘制系统模型:根据实验要求,利用Simulink绘制出所需的系统模型,包括输入、输出、控制器、传感器等。
2. 参数设置:针对所绘制的系统模型,根据实验要求设置系统的参数,例如增益、阻尼系数等。
3. 仿真运行:通过Simulink的仿真功能,对所构建的系统模型进行仿真运行。
4. 仿真结果分析:根据仿真结果,分析系统的动态性能、稳态性能等指标,并与理论值进行对比。
四、实验结果与分析根据实验要求,我们绘制了一个负反馈控制系统的模型,并设置了相应的参数。
通过Simulink的仿真功能,我们进行了仿真运行,并获得了仿真结果。
仿真结果显示,系统经过调整参数后,得到了较好的控制效果。
输出信号的稳态误差较小,并且在过渡过程中没有发生明显的振荡或超调现象。
通过与理论值进行对比,我们验证了系统的稳态稳定性和动态响应性能较为理想。
五、实验总结通过本次实验,我们掌握了使用Simulink进行系统仿真的基本方法和技巧。
了解了系统模型构建的基本原理,并学会了参数调整和仿真结果分析的方法。
这对于我们今后的工程设计和研究具有重要的意义。
六、参考文献1. 《Simulink使用手册》,XXX出版社,20XX年。
2. XXX,XXX,XXX等.《系统仿真与建模实践教程》. 北京:XXX出版社,20XX年。
SIMULINK仿真实验
SimuLink 仿真二阶微分方程的求解专业:信息****** 1031020118****** 1031020124****** 1031020217指导老师:***日期:2012—12—25题目:二阶微分方程的求解一、实验目的1、熟悉Simulink 基本用法。
2、了解simulink 的一些模块的意义。
3、掌握模块的选取、复制、删除操作。
4、学会simulink 模块的连接以及模块参数的设置。
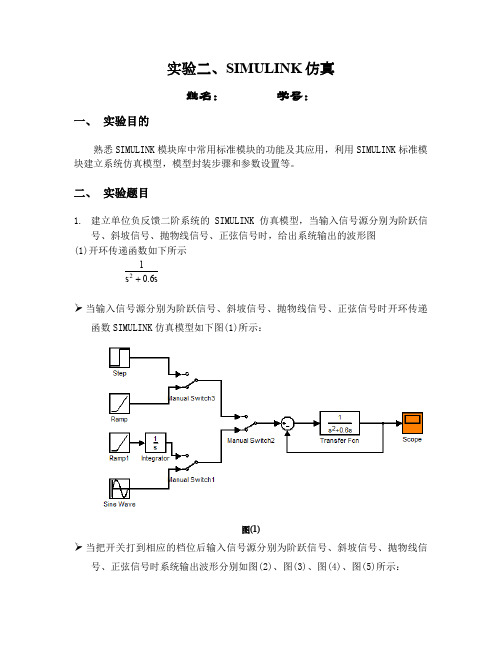
二、实验仪器1、计算机2、MATLAB 软件环境三、实验内容1、求解二阶微分方程x(t)0.4x(t)0.9x(t)0.7u(t)++=的方程解,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
2 、求解二阶微分方程x(t)0.2x(t)0.4x(t)0.2u(t)++=,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
3、求解二阶微分方程x(t)0.5x(t)0.8x(t)0.9u(t)++=的解x(t);其中初值为 ,并且 是一个余弦信号。
四、实验过程1、求解二阶微分方程x(t)0.4x(t)0.9x(t)0.7u(t)++=的方程解,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
1.1)用matlab 求解此二阶微分方程:在matlab 中输入程序: syms t y;u=sin(t); uu=0.7*u;y=dsolve(['D2y+0.4*Dy+0.9*y=',char(uu)]);程序运行结果:y =exp(-1/5*t)*sin(1/10*86^(1/2)*t)*C2+exp(-1/5*t)*cos(1/10*86^(1/2)*t)*C1-7/17*sin(t)-28/17*cos(t) 1.2)利用simulink 求解此二阶微分方程x(0)1x(0)3=⎧⎨=⎩u(t)cos(t)=1.21使用simulink创建微分方程:创建m文件:function Ts=yuejiewqqt=0:.1:20;y=heaviside(t);Ts=[t',y'];用Simulink做所得模块:1.22设置模块属性:设置模块pulse的模块属性:设置模块add的模块属性:1.23 运行simuliksimulink结果运行图:2、求解二阶微分方程x(t)0.2x(t)0.4x(t)0.2u(t)++=,其中u(t)是脉冲信号。
simulink的电力系统仿真实验原理

simulink的电力系统仿真实验原理电力系统仿真实验原理:电力系统仿真实验是利用Simulink软件对电力系统进行建模、仿真和分析的过程。
该实验主要包括如下几个步骤:1. 建立电力系统模型:在Simulink环境中,根据实际电力系统的结构和特性,利用各种电力元件如发电机、变压器、传输线路、负荷等构建电力系统模型。
可以根据具体需要设置不同的电路参数和拓扑结构,以便对各种电力系统问题进行仿真分析。
2. 设定仿真参数:根据实验要求,设定仿真的时域范围、仿真步长以及模型的输入和输出要求。
例如,可以设定仿真时间为几百毫秒或几秒钟,仿真步长为毫秒级别,以获取系统各个节点的电压、电流等参数。
3. 添加模型控制器:根据需要,可以在模型中添加各种控制器如PID控制器、调速器等,以实现对电力系统的调节和控制。
控制器的参数可以根据实验要求进行设定和调整,以达到理想的控制效果。
4. 进行仿真实验:单击Simulink软件中的"运行"按钮,系统便开始进行仿真计算。
Simulink根据所设定的仿真参数和模型的输入,采用数值计算方法对电力系统进行仿真计算,并输出各个节点的电压、电流等参数。
仿真的过程也可以通过实时仿真功能进行可视化展示。
5. 分析仿真结果:根据仿真结果,可以对电力系统的运行情况进行分析和评估。
例如,可以分析系统的稳定性、安全性、损耗情况等。
如果仿真结果与实际情况存在差异,可以进一步调整电力系统模型和仿真参数,以提高仿真的准确性。
通过Simulink软件的电力系统仿真实验,可以有效地分析和解决实际电力系统中的问题。
同时,仿真实验也为电力系统的运行和优化提供了可靠的依据,减少了实验成本和风险。
simulink仿真实验报告

simulink仿真实验报告一、实验目的本次实验的主要目的是通过使用Simulink软件来进行仿真实验,掌握Simulink仿真工具的基本使用方法,并且了解如何应用Simulink软件来进行系统建模和仿真分析。
二、实验内容1. Simulink软件的基本介绍2. Simulink仿真工具的使用方法3. Simulink模型建立与参数设置4. Simulink仿真结果分析三、实验步骤及方法1. Simulink软件的基本介绍Simulink是一种基于模块化编程思想的图形化编程工具,可以用于建立各种系统模型,并且进行系统仿真分析。
在Simulink中,用户可以通过拖动不同类型的模块来搭建自己所需要的系统模型,并且可以对这些模块进行参数设置和连接操作。
2. Simulink仿真工具的使用方法首先,在打开Simulink软件后,可以看到左侧有一系列不同类型的模块,包括数学运算、信号处理、控制系统等。
用户可以根据自己需要选择相应类型的模块,并将其拖入到工作区域中。
然后,用户需要对这些模块进行参数设置和连接操作,以构建出完整的系统模型。
最后,在完成了系统模型的构建后,用户可以进行仿真分析,并且观察系统的运行情况和输出结果。
3. Simulink模型建立与参数设置在本次实验中,我们主要是以一个简单的控制系统为例来进行仿真分析。
首先,我们需要将数学运算模块、控制器模块和被控对象模块拖入到工作区域中,并将它们进行连接。
然后,我们需要对这些模块进行参数设置,以确定各个模块的输入和输出关系。
最后,在完成了系统模型的构建后,我们可以进行仿真分析,并观察系统的运行情况和输出结果。
4. Simulink仿真结果分析在完成了Simulink仿真实验之后,我们可以得到一系列仿真结果数据,并且可以通过Simulink软件来对这些数据进行进一步的分析和处理。
例如,在本次实验中,我们可以使用Simulink软件来绘制出控制系统的输入信号、输出信号和误差曲线等图形,并且可以通过这些图形来判断系统是否满足预期要求。
实验二--基于simulink的2ASK数字调制与解调的仿真

实验二 基于simulink 的2ASK 有扰通信系统仿真一、实验目的1、熟悉2ASK 系统的调制、解调原理2、进一步熟悉MATLAB 环境下的Simulink 仿真平台3、提高学生分析问题和解决问题的能力二、实验原理1、2ASK 调制原理a)2ASK 的时间波形振幅键控是正弦载波的幅度随数字基带信号而变化的数字调制。
当数字基带信号为二进制时,则为二进制振幅键控。
设发送的二进制符号序列由0、1序列组成,发送0符号的概率为P ,发送1符号的概率为1-P ,且相互独立。
该二进制符号序列可表示为)()(S nn nT t g a t s -=∑其中,⎩⎨⎧=P -P 110发送概率为发送概率为n a T s 是二进制基带信号时间间隔,g(t)是持续时间为T s 的矩形脉冲:⎩⎨⎧≤≤=其他001)(s T t t g则二进制振幅键控信号可表示为t nT t g a t t s t s c s n n c ASK ωωcos )(cos )()(2⎥⎦⎤⎢⎣⎡-==∑ 典型波形如图1-1所示图1-1 典型2ASK 波形由图1-1可以看出,2ASK 信号的时间波形e 2ASK (t)随二进制基带信号s(t)通断变化,所以又称为通断键控信号(OOK 信号)。
b)2ASK 信号的功率谱密度由于二进制的随机脉冲序列是一个随机过程,所以调制后的二进制数字信号也是一个随机过程,因此在频率域中只能用功率谱密度表示。
2ASK 信号功率谱密度的特点如下:(1)由连续谱和离散谱两部分构成,连续谱由调制信号g(t)经线性调制后决定,离散谱由载波分量决定;(2)已调信号波形的带宽是基带脉冲波形带宽的2倍。
2ASK 信号功率谱密度推导:设调制信号s(t)为单极性不归零码,码元间隔为T s ,高电平设为A ,低电平为0,则)(t s 的功率谱)(f P s 为 )(4)(4)(222f A fT Sa T A f P s s s δπ+= 已调信号为t nT t g a t t s t s c S n n c ASK ωωcos )(cos )()(2⎥⎦⎤⎢⎣⎡-==∑,其功率谱为[])()(16)()(sin )()(sin 16)(2222c c s c s c s c s c s e f f f f A T f f T f f T f f T f f T A f P -+++⎥⎥⎦⎤⎢⎢⎣⎡--+++=δδππππ图1-2 2ASK 信号的功率谱密度示意图图中,sb T f 1=,为调制信号s(t)的带宽,数值上也等于码元速率。
基于simulink的系统仿真实验报告(含电路、自控、数电实例)
《系统仿真实验》实验报告目录一《电路》仿真实例 (3)2.1 简单电路问题 (3)2.1.1 Simulink中仿真 (3)2.1.2 Multisim中仿真 (4)2.2 三相电路相关问题 (5)二《自动控制原理》仿真实例 (7)1.1 Matlab绘图 (7)三《数字电路》仿真实例 (8)3.1 555定时器验证 (8)3.2 设计乘法器 (9)四实验总结 (11)一《电路》仿真实例2.1 简单电路问题课后题【2-11】如图所示电路,R0=R1=R3=4Ω,R2=2Ω,R4=R5=10Ω,直流电压源电压分别为10V、4V、6V,直流电流源电流大小为1A,求R5所在的支路的电流I。
(Page49)解:simulink和multisim都是功能很强大的仿真软件,下面就以这个简单的习题为例用这个两个软件分别仿真,进一步说明前者和后者的区别。
2.1.1 Simulink中仿真注意事项:由于simulink中并没有直接提供DC current source,只有AC current source,开始的时候我只是简单的把频率调到了0以为这就是直流电流源了,但是并没有得到正确的仿真结果。
后来问杨老师,在老师的帮助下发现AC current source的窗口Help中明确的说明了交流变直流的方法:A zero frequency and a 90 degree phase specify a DC current source.然后我把相角改成90度后终于得到了正确的仿真结果,Display显示I=0.125A,与课本上答案一致。
2.1.2 Multisim中仿真结果:I=125mA=0.125A(因为电流表探针电压电流比是1V/mA)。
2.2 三相电路相关问题【例】三相电路实际连接图如下所示,是通过功率表和电流的读数,验证课本上的相关结论。
解:Multisim中电路图连接如下所示:解:观察各支路的功率和功率因素,验证了以下几点结论:(1)只有纯阻性支路的功率因素为1;(2)纯感性或纯容性支路的功率因素为0,有功功率也为0;(3)混合支路的(容阻、感阻、容感阻)功率因素在0到1之间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二-Simulink仿真实验
实验二 Simulink 仿真实验
一、 实验目的:
1、学会使用Matlab 软件中的Simulink 仿真工具。
2、了解二阶系统瞬态响应指标的意义其计算。
二、 实验内容及原理
1、 用Matlab 仿真(simulink )图示系统输入单位阶跃信号1(t)的响应,
分析响应曲线的稳态响应X oss (t ),振荡频率ωd (rad/s),超调量M p ,
峰值时间t p ,进入稳态值+5%误差带的调整时间t s 。
X i (s) X o (s)
三、 实验步骤:
1、
使用Matlab 软件,进入Simulink 编辑画面。
2、
用Linear ,Sinks ,Sources,模块库建立系统的函数方块图。
3、
运行Simulink 。
4、 记录输出曲线,分析实验结果。
四.分析实验结果,写出实验报告。
0.02
)450(100
s s
G1=tf([100],[50 4 0]);
H1=tf(0.02,1);
disp('负反馈系统闭环传递函数为:') sys=feedback(G1,H1)
step(sys,1:0.1:200)
Step Response Tim e (sec)A m p l i t u d e 00.2
0.4
0.6
0.8
11.21.4
1.6
1.8
System : sys Rise Tim e (sec): 1.11System : sys P eak am plitude: 1.73Overshoot (%): 72.9At tim e (sec): 3.2System : sys
Settling Tim e (sec): 38.4
实验三 频域分析实验
一、 实验目的
学会使用Matlab 绘制系统Nyquist 图和Bode 图。
二、 实验内容及原理
两单位负反馈控制系统开环传递函数分别为:
)
5)(1(5)(1++=s s s s G 和)1()1(10)(22-+=s s s s G 1、 利用Matab 软件画出开环Nyquist 曲线。
2、 利用Matab 软件画出开环系统Bode 图,求开环频域指标:
剪切频率ωc 、相位穿越频率ωg 、相位裕量γ和幅值裕量K g 。
三、 实验步骤
1、 编辑程序,绘制系统Nyquist 图和Bode 图。
2、 记录输出曲线,分析实验结果。
四、 写出实验报告
1、num1=[5];
den1=conv(conv([1 0],[1 1]),[1 5]);
sys1=tf(num1,den1);
nyquist(sys1)
num2=[10 10];
den2=conv(conv([1 0 0],[1 0 0]),[1 -1]);
sys2=tf(num2,den2);
nyquist(sys2)
Nyquist Diagram
Real Axis
I m a g i n a r y A x i s Nyquist Diagram
Real Axis
I m a g i n a r y A x i s
num1=[5];
den1=conv(conv([1 0],[1 1]),[1 5]); sys1=tf(num1,den1);
margin(sys1)
[Gm,Pm,Wg,Wc]=margin(sys1)
Gm =
6
Pm =
43.2099
Wg =
2.2361
Wc =
0.7793
-100
-50
050100
150
M
a g n i t u d e (d
B )
1010101010-360
-315
-270
-225
-180
P h a s e (d
e g )Bode Diagram
Gm = Inf dB (at Inf rad/sec) , P m = -35.1 deg (at 3.16 rad/sec)
Frequency (rad/sec)
num2=[10 10];
den2=conv(conv([1 0 0],[1 0 0]),[1 -1]);
sys2=tf(num2,den2);
margin(sys2)
[Gm,Pm,Wg,Wc]=margin(sys2)
Gm =
Pm =
121.2983
Wg =
Wc =
2、分析实验结果。
)5)(1(5
)(1++=s s s s G
由波特图可知,幅值裕度大于1,相角裕度大于0,所以该系统稳定。
)1()
1(10)(22-+=s s s s G
由波特图可知,幅值裕度小于1,相角裕度小于0,所以该系统不稳定。