线元法任意线型坐标计算
交点法、线元法坐标计算
3、交点法、线元法坐标计算坐标计算是根据图纸中“直线及曲线转角一览表”提供的数据计算道路中桩坐标,然后和图纸提供的“逐桩坐标表”比对,如果一样则说明输入平曲线参数输入正确,可以计算边桩坐标和其他结构物坐标了;如果中桩坐标不一样,一般是平曲线参数输入有误,需要重新检查输入,另一种结果是图纸有错,这种情况少见,但不代表没有。
“直线及曲线转角一览表”和“逐桩坐标表”见附件1、附件2。
线元法是以路线的起点坐标、方位角、起终点桩号等节点元素来计算出要求的坐标;交点法是以路线的交点要素和路线的主要要素来求得坐标。
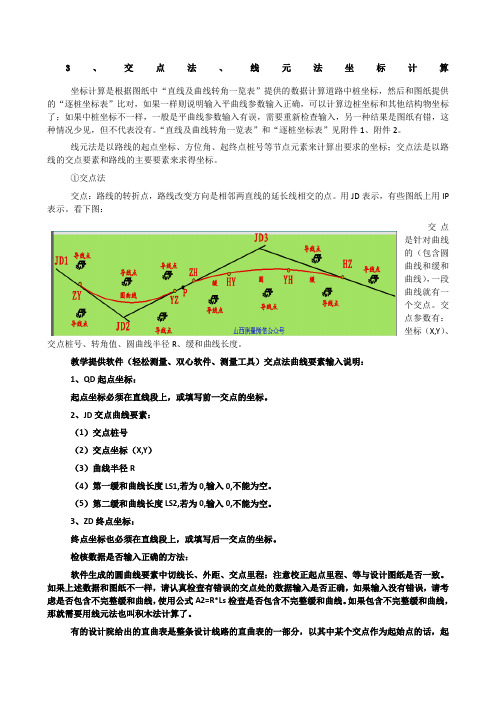
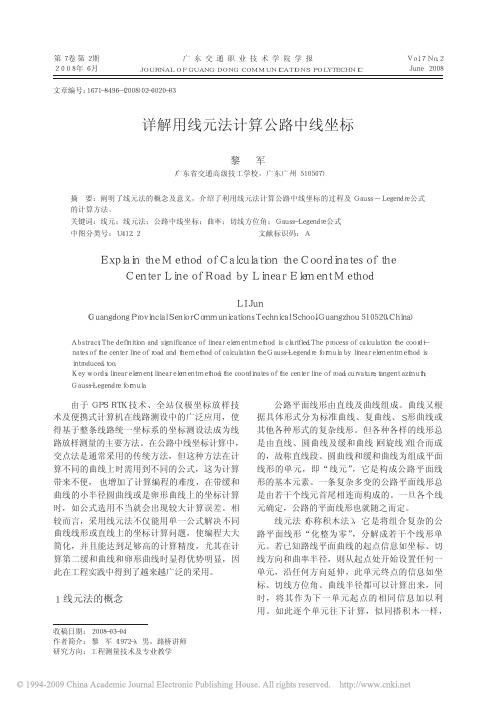
①交点法交点:路线的转折点,路线改变方向是相邻两直线的延长线相交的点。
用JD表示,有些图纸上用IP 表示。
看下图:交点是针对曲线的(包含圆曲线和缓和曲线),一段曲线就有一个交点。
交点参数有:坐标(X,Y)、交点桩号、转角值、圆曲线半径R、缓和曲线长度。
教学提供软件(轻松测量、双心软件、测量工具)交点法曲线要素输入说明:1、QD起点坐标:起点坐标必须在直线段上,或填写前一交点的坐标。
2、JD交点曲线要素:(1)交点桩号(2)交点坐标(X,Y)(3)曲线半径R(4)第一缓和曲线长度LS1,若为0,输入0,不能为空。
(5)第二缓和曲线长度LS2,若为0,输入0,不能为空。
3、ZD终点坐标:终点坐标也必须在直线段上,或填写后一交点的坐标。
检核数据是否输入正确的方法:软件生成的圆曲线要素中切线长、外距、交点里程:注意校正起点里程、等与设计图纸是否一致。
如果上述数据和图纸不一样,请认真检查有错误的交点处的数据输入是否正确,如果输入没有错误,请考虑是否包含不完整缓和曲线,使用公式A2=R*Ls检查是否包含不完整缓和曲线。
如果包含不完整缓和曲线,那就需要用线元法也叫积木法计算了。
有的设计院给出的直曲表是整条设计线路的直曲表的一部分,以其中某个交点作为起始点的话,起始里程有时候需要校正,当然,并不是每个图纸给出的起点里程都需要校正,大多数图纸的起点里程已经被设计院校正过,我们输入平曲线的时候需要验证一下。
直线上任意一点坐标计算
直线上任意一点坐标计算一、方位角计算1、方位角定义 方位角又称地平经度(Azimuth (angle)缩写Az) 是在平面上量度物体之间的角度差的方法之一。
是从某点的指北方向线起 依顺时针方向到目标方向线之间的水平夹角。
2、方位角的种类1 真方位角 某点指向北极的方向线叫真北方向线 而经线 也叫真子午线。
由真子午线方向的北端起 顺时针量到直线间的夹角 称为该直线的真方位角 一般用A表示。
通常在精密测量中使用。
2 磁方位角 地球是一个大磁体 地球的磁极位置是不断变化的真方位角 某点指向磁北极的方向线叫磁北方向线 也叫磁子午线。
在地形图南、北图廓上的磁南、磁北两点间的直线 为该图的磁子午线。
由磁子午线方向的北端起 顺时针量至直线间的夹角 称为该直线的磁方位角 用Am表示。
3 坐标方位角。
由坐标纵轴方向的北端起 顺时针量到直线间的夹角 称为该直线的坐标方位角 常简称方位角 用a表示。
3、方位角的计算公式 设点A (X 1、Y 1) 点B(X 2、Y 2),求A-B的方位角 F A-B =arc tanY 2- Y 1/X 2- X 1,若F A-B小于0则加180° 在计算器中arc tan输入为tan-1 。
二、距离计算公式设点AX 1,Y 1 点B X 2 Y 2 求A-B的距离 S A-B=√(X 2- X 1)2+(Y 2- Y 1)2三、坐标正算 1、定义:坐标正算为已知一点坐标、方位角、与另一点距离 求另一点坐标。
四、2、计算公式:已知点A坐标X 1、Y 1;A-B之间的方位角为F A-B, A-B之间的距离为S A-B。
求B点坐标X 2、Y 2。
X 2= X 1+ S A-B ×CosF A-B。
Y 2= Y 1+ S A-B×SinF A-B。
五、坐标反算1、定义:坐标反算为已知两点坐标求方位角、距离。
2、计算公式:已知点A坐标X 1、Y 1。
B点坐标X 2、Y 2。
公路路线坐标计算说明书_1.3.0

智璟安卓工程计算系统公路路线坐标计算说明书一、计算原理1、公路路线坐标计算是用线元法方式进行坐标、方位角(均指中桩切线方位角)的计算的,其中缓和曲线是用复化辛普森公式进行计算的。
线元法计算方式通用性强,不用区分直线、圆曲线、缓和曲线的组合方式,计算对象为每一个独立的线元,而非组合线型。
计算方式为通过逐个计算每个线元的终点坐标、方位角来计算整条路线上任意一点的坐标和方位角。
2、公路路线坐标计算所指的线元仅为直线、圆曲线和缓和曲线(回旋线)这三种,要求两线元交接点的曲率半径和方位角相同,即前一线元终点的曲率半径、方位角等于后一线元起点的曲率半径、方位角;如果两线元交接点的曲率半径不同,需要采用加入虚线元的方式进行处理,但仍需保证两线元交接点的方位角相同。
3、计算前先要建立整条路线的基本数据及线元终点桩号、终点曲率半径的数据库,计算时选择路线文件后只要输入所在路线上的任何一个桩号,即可进行此桩号坐标和方位角的计算。
4、建立路线数据库可以在程序界面提示下逐个手工输入数据,也可以通过外部TXT 文本文件导入数据,毕竟用电脑在TXT文件中输入数据更快、更方便。
5、由于计算任意桩号的坐标、方位角都是从整条路线的起点坐标、方位角开始逐个线元计算出来的,因此为了减少累积误差,均采用较高的计算精度,在利用辛普森公式迭代计算时,曲线分段数(迭代次数)均给予了偏高的取值,保证每次计算X、Y坐标同时精确到0.000001;同时角度(8位小数)、半径(6位小数)数据均要求较高的输入精度。
由于计算方式、计算精度、数据输入精度(角度、半径)的不同,计算结果可能与设计给出的结果存在微小的偏差,属正常现象。
6、程序未提供断链处理功能,如果整条路线有断链情况,请从断链处分段建立不同的路线文件。
7、程序只适合于一般手机竖屏显示状态下的正常使用。
二、功能介绍1、对整条路线上任意桩号的中桩、正交边桩、斜交边桩的坐标进行计算,包括中桩切线方位角。
线元法曲线任意里程中边桩坐标正反算(CASIO_fx-5800P计算器)程序(附带高程)
线元法曲线任意里程中边桩坐标正反算(CASIO fx-5800P计算器)程序(附带高程)一、功能及原理说明1. 功能说明:本程序由一个主程序(1-MAIN)和七个子程序——正算子程序(1-SUB-ZS)、反算子程序(1-SUB-FS)等构成,可以根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距或坐标,对该曲线段范围内任意里程中边桩坐标进行正反算。
本修改版程序既可实现正算全线贯通,亦可实现反算全线贯通。
本程序在CASIO FX-5800P计算器运行。
2.计算原理:利用Gauss-Legendre 5点通用公式正算线路中边桩坐标、线外测点至曲线元起点和终点的垂距的符号是否相异(即Dca×Dcb<=0=>该测点在其线元内)进行判断并利用该线元要素反算中桩里程、支距,最后计算出反算结果。
3. 程序输入计算器后,请根据统计串列List X,Y,freq[N]在程序中实际可能被使用的维数,将其统计矩阵串列改为包含相应维数的任意数据的矩阵,即在list列表中随机输入相应维数的数据,保证矩阵大小符合维数要求。
4. 本程序正算速度在1-2秒左右,反算比正算慢点,可根据需要调整精度加快速度。
本程序可建立曲线要素数据库及高程变坡点数据库,一次输入整条线路数据,计算时自动调用数据库,实现全线贯通,也可临时手动输入线元计算要素进行计算。
5. 本程序由小骆在前人的基础上改进而成,经个人测试可用。
学识浅薄,不足之处,在所难免,欢迎提出改进意见。
二、源程序1.主程序(1-MAIN)Deg:fix 320→DimZLbl 0:cls:“INPUT(0),ZX(1),YX(2)”?I (选择手动输入计算参数0,还是调用线路数据1,2)If I=0:Then Prog “1-DAT1”:IfEnd“SZ=>XY(1),XY=>SZ(2)”?N(正算,反算)If N=1 :Then Goto 1Else If N=2 :Then Goto 2Else Goto 3IfEnd:IfEndLbl 1:“KP=”?S(输入待求桩号)If S<0:Then Goto 0:IfEnd“JL(m)=”?Z (输入偏距)If Z≠0:Then “ANGLE→R(Deg)=”?M:IfEnd (输入斜交右角)If I≠0:Then Prog “1-DAT2”:IfEndS-O→W:If W<0:Then Goto 0:Else If W>H:Then cls:locate 6,2,"KP OUT"◢Goto 0:IfEnd:IfEnd(前半条针对“DAT”情况,后半条针对“INPUT”情况。
最新Qh2-8线元法任意路线与匝道曲线坐标正、反算程序
Q h2-8线元法任意路线与匝道曲线坐标正、反算程序5800计算器坐标计算程序(线元法任意路线与匝道曲线坐标正、反算程序)程序1:QH2-8"ROUTE Or RAMP QH2-8"◢书中多了个个双引号(这里说的书是产品配备的说明书)Deg:Fix 3:书中Freqon取消"NEW(0),OLD(≠0)DATA="?→CIf C≠0:Then "RECOMP(0),NO(≠)= "?→G书中0取消If G=0:Then Goto T:Else Goto J: IfEnd“CURVE NUM=”?N1→Q:5N+11→DimZ“START a(Deg)=”?→Z[5]For 1→I To N“n=”:I◢“START R(m)=”?→Z[5I-4]Z[5I-4]=0=>1X1030→Z[5I-4]“END R(m)=”?→Z[5I-3]Z[5I-3]= 0=>1X1030→Z[5I-3]“LENGTH(m)=”?→Z[5I-2]If Z[5I-4]<1X1030 Or Z[5I-3] <1X1030Then “DEFLEX L(-1),R(1)=”?→Z[5I-1]:IfEnd 注意-1是减1NEXT“[MODE][1] =>Stop!”◢Lb1 T:0→I:For 1→I To NList X[I]+Rep(Z[5I-2])→List X[I+1]List X[I+1]→ZIf Z[5I-4]=Z[5I-3]And Z[5I-4]= 1X1030Then 0→S:0→T:Z[5I-2]→DProg “SUBQ2-84”:Goto 0:IfEndIf Z[5I-4]=Z[5I-3] And Z[5I-4] <1X1030Then Prog “SUBQ2-83”:Goto 0:IfEnd√根号(Rep(Z[5I-2])÷Abs(Z[5I-4]-1-Z[5I-3]-1))→A Rep(Z[5I-2])+Ai→Z[5I-2]Prog “SUBQ2-82”Lb1 0:T→Z[5I+1]]Rep(U)→List Y[I+1]:Imp(U)→List Freq[I+1] Next“PEG-END(m)=”:List X[N+1] ◢“a-END(DMS)=”DMS◢“X-END(m)=”:List Y[N+1] ◢“Y-END(m)=”:List Freq[N+1] ◢“[MODE][4]=>Stop!”◢Lb1 J:”STA BACKXY,NEW(0),O LD(≠0)=”?→JJ≠0=>Goto 1“STAn,X(m),<0=>NO=“?→S0→Z[5N+6]:S<0=>Goto 1If Frac(S)=0 And S≤N+1Then List Y[S]+List Freq[S]i→Z[5N+6]Else “STA Y(m)=”?→T:S+Ti→Z[5N+6]:IfEndLb1 B:”BACKn,X(m),OLDa(0),<0=>a=”?→UU=0=>Goto 1If U<0:Then “a-BACK(Deg)=”?→Z[5N+8]:Goto 1:IfEnd If S=U And Frac(U)=0Then”STAn=BACKn,REPEAT!”Goto B:IfEndIf Frac(U)=0 AND U≤N+1Then List Y[U]+List Freq[U]i→Z[5N+7]Else”BACK Y(m)=”?→V:U+Vi→Z[5N+7]:IfEndLb1 S:Arg(Z[5N+7]-Z[5N+6])→JJ<0=>J+360→J:J→Z[5N+8]Lb1 1:”PEG→XY(1),XY→PEG(≠1)=”?→QQ≠1=>Goto 2Do:”+PEG(m),<0=>END=”?→ZZ<List X[1] Or Z>List X[N+1]=>BreakFor 1→I To NZ<List X[I] Or Z>List X[I+1]=>Goto NZ-List X[I]→LIf Z[5I-4]=Z[5I-3] And Z[5I-4]= 1X1030Then 0→S:0→T:L→DProg “SUBQ2-84”: Prog “SUBQ2-85”:Break:IfEnd If Z[5I-4]=Z[5I-3] And Z[5I-4]<1X1030Then Prog”SUBQ2-83”Prog “SUBQ2-85”: Break:IfEndProg “SUBQ2-82”: Prog “SUBQ2-85”:BreakLb1 N:NextLpWhile Z>0:Goto ELb1 2:”XJ(m), <0=>END=”?X:X<0=>Goto E“YJ(m)=”?Y“J in NUM,<0=>AUTO=”?→I:I>0=>Goto3Abs(X+Yi-List Y[1]-List Freq[1]i→CList X[1]+C→ZFor 1→S To NZ>List X[S] And Z<List X[S+1]=>Break:Next 9000→C:S→EFor E→I To N(List Y[I]+ListY[I+1])÷2→U(List Freq[I]+List Freq[I+1])÷2→VAbs(X+Yi-U-Vi)→DIf D<C:Then D→C:I→F:IfEndNext:F≥2=>F-1→ILb1 3:If Z[5I-4]=Z[5I-3] And Z[5I-4]=1X1030 Then tan(Z[5I])→T(X+T2List Y[I]-T(List Freq[I]-Y))÷(T2+1)→UU+(Y-(U+X)÷T)i→U:Z[5I]→TU-List Y[I]-List Freq[I]→FArg(F)→H:H<0=>H+360→H1→J:Abs(T-H)>150=>-1→JList X[I]+JAbs(F)→ZIf Z≥List X[I] And Z≤List X[I+1]:Then Goto Z Else I+1>N=>Goto Z:I+1→I:Goto 3:IfEnd:IfEnd If Z[5I-4]=Z[5I-3] And Z[5I-4]<1X1030Then List Y[I]+List Freq[I]i→SZ[5I]+90Z[5I-1]→AZ[5I-4]→R:S+R<A→VX+Yi→U:Arg(U-V)→F:Abs(U-V)→DV+R<F→UAbs(U-S)→C:sin-1(C÷2÷R)→EZ[5I]+2Z[5I-1]E→TList X[I]+∏ER÷90→ZIf Z≥List X[I] And Z≤List X[I+1]:Then Goto ZElse I+1>N=>Goto Z:I+1→I:Goto 3:IfEnd:IfEnd List Y[I+]+List Freq[I]i→UList Y[I+1]+List Freq[I+1]→V(U+V)÷2→FV-U→C:Abs(C)→S:Arg(C)→JJ<0=>J+360→J:J+90Z[5I-1]→GIf Z[5I-4]>Z[5I-3]:Then 2Z[5I-3]→RElse 2Z[5I-4]→R:IfEnd√(R2-S2÷4)→TF+T<G→OSin-1(S÷R÷2)→V:∏VR÷90→J(Rep(Z[5I-2])-J)÷J→PX+Yi-O→V:Arg(V)→JO+R<J→C:Abs(C-U)→SSin-1(S÷R÷2)→V:∏VR÷90→JList X[I]+J(1-P)→ZProg “SUBQ2-82”DoX+Yi-U→C:Abs(C)→SArg(C)→J:J<0=>J+360→JJ-T→J:J<0=>J+360→JIf J>220:Then J-270→J:-1→FElse 90-J→J:1→F:IfEndIf Z[5I-4]>Z[5I-3]Then πJ÷180÷(FZ[5I-1]L÷A2+S-1)→EElse πJ÷180÷(-FZ[5I-1]L÷A2+S-1)→E:IfEndZ+E→ZIf Z>List X[I+1]:Then I+1→I:Goto 3:IfEndProg “SUBQ2-82”Tan(T)(ImP(U)-Y)+ReP(U)-X→CLpWhile Abs(C)>0.001Fix 4:”f(Lp)=”:C◢Fix 3:Lb1 Z:Prog “SUBQ2-85”:Goto 2Lb1 E:”QH2-8=>END”程序2:SUBQ2-81If L<1X10-5:Then 0→U:0→J:Return:IfEndL-L∧(5)÷40÷A∧(4)+L∧(9)÷3456÷A∧(8)-L∧(13)÷599040÷A∧(12)+L∧(17)÷175472640÷A∧(16)→OL∧(3)÷6÷A2-L∧(7)÷336÷A∧(6)+L∧(11)÷42240÷A∧(10)-L∧(15)÷9676800÷A∧(14)+L∧(19)÷3530096640÷A∧(18)→UO+Ui→U:(L2÷(2A2))r→JReturn程序3:SUBQ2-82ImP(Z[5I-2])→AA2÷Z[5I-4]→LProg “SUBQ2-81”:U→V:J→EIf Z[5I-4]>Z[5I-3]:Then Z-List X[I]+L→L Prog “SUBQ2-81”:U-V→OElse A2÷Z[5I-3]→LList X[I+1]-Z+L→LProg “SUBQ2-81”:V-U→O:IfEdnAbs(O)→D:Arg(O)→TAbs(T-E)→S:Abs(J-E)→TProg “SUBQ2-84”Return程序4:SUBQ2-83Z[5I-4]→R:Z-List X[I]→L(L÷2÷R)r→S:2Rsin(s)→D2S→T:Prog”SUBQ2-84”Return程序5:SUBQ2-84Z[5I]+Z[5I-1]S→S:Z[5I]+Z[5I-1]T→TT<0=>T+360→T:T>360=>T-360→TList Y[I]+List Freq[I]i+D<S→UReturn程序6:SUBQ2-85T<0=>T+360→T:T>360=>T-360→TIf Q=1:Then “ai(DMS)=”:T◢“Xi(m)=”:Rep(U)◢“Yi(m)=”:Imp(U)◢Else Z<List X[I] Or Z>List X[I+1]=>”OUT OF The CURVE!”◢Arg(X+Yi-U)→H:H<0=>H+360→HAbs(X+Yi-U)→DIf H>180:Then “J in Left,NUM=”:I◢Else “J in Right,NUM=”:I◢IfEnd“p PEG(m)=”:z◢“ap(DMS)=”◢“Xp(m)=”:Rep(U)◢“YP(m)=”:Imp(U) ◢“J→p DIST(m)=”:D◢IfEndIf Abs(Z[5N+6])>0:Then U→Z[5N+7]:Prog “SUBQ2-87”:IfEndZ≠0=>Porg “SUBQ2-86”Return程序7:SUBQ2-86“ANGLE(0)=>NO,-L+R(Deg)=”?KK=0=>ReturnIf K<0:Then K+180→P:Else K→P:K-180→K:IfEnd “WL(m),0=>NO=”?MIf M>0:Then U+M<(T+K)→V“XL(m)=”:Rep(V) ◢“YL(m)=”:Imp(U) ◢If Abs(Z[5N+6])>0:Then V→Z[5N+7]:Prog “SUBQ2-87”:IfEnd:IfEdn“WR(m),0=>NO=”?WIf W>0:Then U+W<(T+P)→V“XR(m)=”:Rep(V) ◢“YR(m)=”:Imp(V) ◢If Abs(Z[5N+6])>0:Then V→Z[5N+7]:Prog “SUBQ2-87”:IfEndIfEdn:Return程序8:SUBQ2-87Z[5N+7]-Z[5N+6]→O:Arg(O)→JJ<0=>J+360→JJ-Arg(Z[5N+8])→J:J<0=>J+360→J(J+1X10-8)≥360=>J-360→J“HR(DMS)=”◢“HD(m)=”:Abs(O) ◢Return红色“O”表示为字母,仅对单个字母另作标记。
5800程序(线元法全线坐标正方算)
5800程序(线元法全线坐标正方算)本程序比较复杂.测量原理不是很明白的朋友慎用请大家经常关注程序B-H的更新2009,5,10日修改见超高子程序B-H黄色部分,另超高数据库增加在超高缓和段输入超高为公路外侧超高说明2009,5,8日正反算选择程序:ZS-FS 更改小错,详见紫色修改内容2009,4,30日更改如下:把原来的4个子程序分解成5个子程序,解决了一个大的竖曲线不能包含几个超高变化段,另外程序内也有两处改变请看红色区域.本程序经过综合考虑5800的设计缺陷,计算速度较慢故只使用高斯四节点法为计算内核.支持多条线路正反算,中桩,边桩高程计算,超高计算,超高缓和计算,加宽计算,加宽缓和计算,边坡开口线计算,挡土墙坡脚线计算,考虑了中间绿化带的影响,适用与国家高速公路至乡村四级公路计算和放样,路基路面工程可以直接得出中边桩的设计三维坐标,去掉加宽和超高影响的计算困难,边坡和坡脚线计算可直接在边坡上提取坐标带入程序,经过所有设计因素的综合,得出更改边距并显示修改偏差后的坐标.反算速度明显提高,只需要3秒.程序无错,可放心输入,另本程序可以增加隧道超欠挖计算子程序,非常方便,因为每个隧道的断面数据不一样,所以在此没有明确写出,有需要的可以联系我.本人QQ76805071,只为交友.计算器主程序:ZHU-CHENG-XULbi0:“1,ZS=FS,2ZS,3FS,4XY=>SG,5。
”?U:U=1=>Prog”ZS-FS”:进入公路三维程序U=2=>Porg”ZS”:进入坐标正算程序U=3=>Porg”FS”:进入坐标反算程序U=4=>Porg”XY =>SG”:进入大地坐标转施工坐标程序…………Goto0:说明:计算器总的主程序,进入选择各种分支计算程序。
1为公路三维计算,2为普通正算,3为普通反算,4为大地坐标转施工坐标。
选择错误重新选择。
此程序可以不用输入,只为给大家一个思路,可以把计算器所有程序集中到一个主程序内管理.公路三维部分正反算选择程序:ZS-FSDeg: //设置角度模式20→DimZ: //扩展变量“1LZ=>XY,2XY=>LZ,3BIANPO-FY”?U://正反算选择,正算选1,反算选2,坡口坡脚选3If U=1: ThenProg”ZS-XH”:IfEnd://进入正算循环主程序IfU=2:Then Prog”FS-XH”:IfEnd: //进入反算循环主程序IfU=3:ThenProg”BP-FY”:IfEnd://进入边坡开挖主程序正算循环主体程序ZS-XH“1PT-2SJ”?W://普通计算和设计边距计算选择“XL-XZ“?U://选择线路1~NIf W=1: Then //运行普通计算模式边踞自由输入Lbi0:”L=”?L:”Z=”?Z: //输入桩号和边距Porg”ZS-XH-1“:Goto0:IfEnd: //运行正算循环子程序If W=2:Then //运行设计计算模式边距按设计输入Lbi1:”L=”? L: //输入桩号Porg”0。
交点法、线元法坐标计算精编版
3、交点法、线元法坐标计算坐标计算是根据图纸中“直线及曲线转角一览表”提供的数据计算道路中桩坐标,然后和图纸提供的“逐桩坐标表”比对,如果一样则说明输入平曲线参数输入正确,可以计算边桩坐标和其他结构物坐标了;如果中桩坐标不一样,一般是平曲线参数输入有误,需要重新检查输入,另一种结果是图纸有错,这种情况少见,但不代表没有。
“直线及曲线转角一览表”和“逐桩坐标表”见附件1、附件2。
线元法是以路线的起点坐标、方位角、起终点桩号等节点元素来计算出要求的坐标;交点法是以路线的交点要素和路线的主要要素来求得坐标。
①交点法交点:路线的转折点,路线改变方向是相邻两直线的延长线相交的点。
用JD表示,有些图纸上用IP表示。
看下图:交点是针对曲线的(包含圆曲线和缓和曲线),一段曲线就有一个交点。
交点参数有:坐标(X,Y)、交点桩号、转角值、圆曲线半径R、缓和曲线长度。
教学提供软件(轻松测量、双心软件、测量工具)交点法曲线要素输入说明:1、QD起点坐标:起点坐标必须在直线段上,或填写前一交点的坐标。
2、JD交点曲线要素:(1)交点桩号(2)交点坐标(X,Y)(3)曲线半径R(4)第一缓和曲线长度LS1,若为0,输入0,不能为空。
(5)第二缓和曲线长度LS2,若为0,输入0,不能为空。
3、ZD终点坐标:终点坐标也必须在直线段上,或填写后一交点的坐标。
检核数据是否输入正确的方法:软件生成的圆曲线要素中切线长、外距、交点里程:注意校正起点里程、等与设计图纸是否一致。
如果上述数据和图纸不一样,请认真检查有错误的交点处的数据输入是否正确,如果输入没有错误,请考虑是否包含不完整缓和曲线,使用公式A²=R*Ls检查是否包含不完整缓和曲线。
如果包含不完整缓和曲线,那就需要用线元法也叫积木法计算了。
有的设计院给出的直曲表是整条设计线路的直曲表的一部分,以其中某个交点作为起始点的话,起始里程有时候需要校正,当然,并不是每个图纸给出的起点里程都需要校正,大多数图纸的起点里程已经被设计院校正过,我们输入平曲线的时候需要验证一下。
详解用线元法计算公路中线坐标
%
i
=
Risin[!A+("AVi
1
l+
"ABVi2 2Ls
l2 ) 180 ] !
式中:
X 、Y— ——线元上所求任意点坐标;
l—— —任意点到线元起点的弧长,即Zi- ZA ; XA 、YA— ——线元起点的坐标; !A—— —线元起点的切线方位角; Ls— ——线元的长度,即 ZB- ZA; "A、"B— ——起终点曲率(左偏时取“- ”号, 右偏取“+”号);
3 曲线上点位切线方位角的计算
如图 2,设回旋曲线起点 A 的曲率为 !A ,其 里程为 ZA;回旋曲线终点 B 的曲率为 !B,其里程 为 ZB,Ax'y' 为以 A 为坐标原点、以 A 点切线为 x' 轴的局部坐标系;AXY 为线路统一坐标系。
线元编号 ① ② ③ ④ ⑤
表1 某卵形曲线参数值
曲线类型
点里程 =240
l=240-223.71=16.285(m) Ls=271.881-223.715=48.166(m) "AB=1/75- 1/50= - 0.006 666 666 667 Ri、Vi 数值直接代入公式,计算过程如表 2 所示。
&R1= R5= 0.118 463 4425 $$R2 = R4 = 0 .239 314 335 2 其中:#$R3 = 0 .284 444 444 4 $V1 = 1 - V5 = 0. 046 910 077 0 $$V2 = 1 - V4 = 0.230 765 344 9 %V3= 0. 5
线元法(亦称积木法),它是将组合复杂的公 路平面线形“化整为零”,分解成若干个线形单 元。若已知路线平面曲线的起点信息如坐标、切 线方向和曲率半径,则从起点处开始设置任何一 单元,沿任何方向延伸,此单元终点的信息如坐 标、切线方位角、曲线半径都可以计算出来,同 时,将其作为下一单元起点的相同信息加以利 用。如此逐个单元往下计算,似同搭积木一样,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
边桩பைடு நூலகம்
N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
坐标计算表
中桩
方位角 #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? 偏距 (m) -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 夹角 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90
备注
公司: 项目:
计算里程 (m)
K209+580.000 K209+600.000 K209+620.000 K209+640.000 K209+660.000 K209+680.000 K209+700.000 K209+720.000 K209+740.000 K209+760.000 K209+780.000 K209+800.000 K209+820.000 K209+840.000 K209+860.000 K209+880.000 K209+900.000 K209+920.000 K209+940.000 K209+960.000 K209+980.000 K210+000.000 N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
公司: 项目:
计算里程 (m)
K208+260.000 K208+280.000 K208+300.000 K208+320.000 K208+340.000 K208+360.000 K208+380.000 K208+400.000 K208+420.000 K208+440.000 K208+460.000 K208+480.000 K208+500.000 K208+520.000 K208+540.000 K208+560.000 K208+580.000 K208+600.000 K208+620.000 K208+640.000 K208+660.000 K208+680.000 N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
备注
公司: 项目:
计算里程 (m)
K208+700.000 K208+720.000 K208+740.000 K208+760.000 K208+780.000 K208+800.000 K208+820.000 K208+840.000 K208+860.000 K208+880.000 K208+900.000 K208+920.000 K208+940.000 K208+960.000 K208+980.000 K209+000.000 K209+020.000 K209+040.000 K209+060.000 K209+080.000 K209+100.000 K209+120.000 N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
边桩
N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
边桩
N (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? E (m) #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME?
坐标计算表
中桩
方位角 #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? 偏距 (m) -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 夹角 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90
坐标计算表
中桩
方位角 #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? #NAME? 偏距 (m) -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 -12.25 夹角 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90 90