基于MFC和VegaPrime的无人机三维视景仿真实现
基于VegaPrime和OpenGL的武器观瞄系统的仿真
与建立视景仿真。V P具有很多相 比 V g 优秀的特 e a 点,它 的 函数是 基于 C + S L的 A I +和 T P ,同时使 用 高 级跨 平 台场景 图像 应用 程序 接 口 V g cn ea S ee
G a h( G)取 代 了 P r r r rp VS ef me ,而 且 V 是 跨平 o P 台且基 于线 程 的u J 。
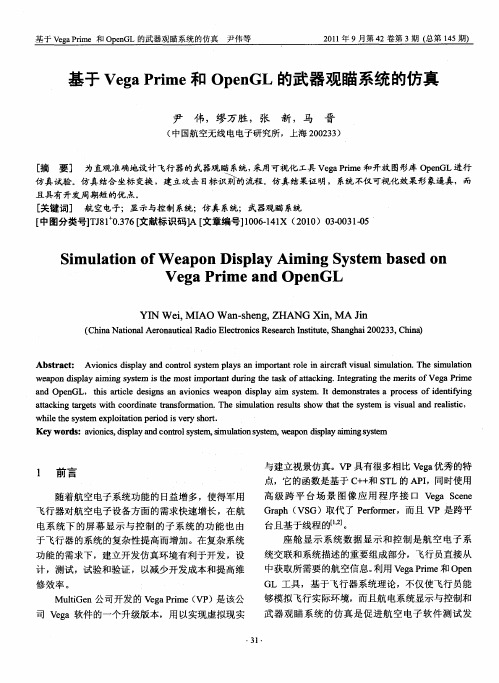
武 器 观 瞄 的 仿 真 系 统 由一 台 电脑 主 机 和 带双 路输 出 的对 两个 屏幕 分屏 组 成,主 驾驶 员 的操作 与
副驾 驶员 的操 作有 区别 且操 作不 同步 。因此 对软 件 的性 能要 求很 高,既要保 证刷 新 率也 要保证 功 能按
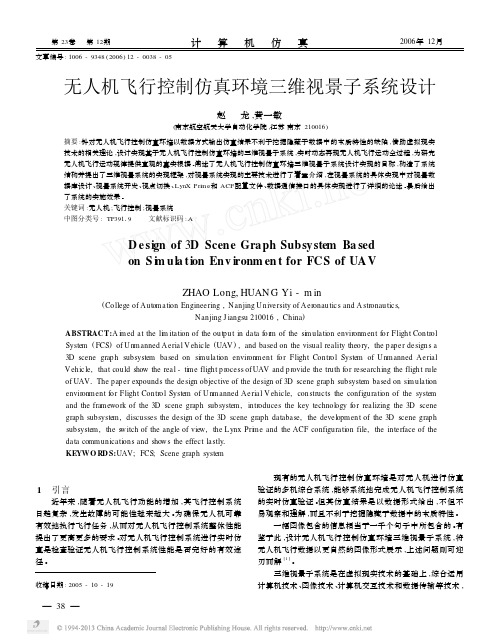
2 航空 电子显 示与控制 系统及武器 观瞄 系 统 仿 真 结 构
显控 系统 在 MF 上 除 了显示 文字 信息 之外 , D
合 显 示 系 统 计 算 机 作 为 显 控 模 块 分 别 完 成 左右 驾 驶三 维 图像 的 同时生成 ,其 中可切 换 为视景 观瞄 模 式 :多功 能键 盘 MF 和 观瞄 手柄 的数据 采集 主机 K
通过 总线 与 综合 显示 系统计 算机 通信 ,实现 键盘 和
总线
■ ■
爱
—
若 J一
V g r e ea i 进行填充。借助实时视景仿真渲染软ቤተ መጻሕፍቲ ባይዱ Pm
任 达 J机 务 I模惯 仿 发 仿 管雷拟 真 动 芝… 真 理
图 1 仿真系统结构示意图
I } 外
e aPi V g r me在航 空仿 真方 面 的独特 优势 ,充 分利用
手 柄 的操作 信 息传 递 ;同时飞 行控制 系 统主机 将数
无人机三维视景仿真系统的设计与实现
无人机三维视景仿真系统的设计与实现作者:谢迪来源:《硅谷》2015年第01期摘要无人机操作是一个复杂的过程,对操作人员素质要求很高。
传统的无人机地面站系统数据回显多采用参数、二位图标以及图表曲线等形式,使操作手不能对飞行在三维空间内的无人机飞行状态有一个直观的感受。
本文依据虚拟仿真现实技术的相关理论,介绍了在无人机地面站系统中加入三维视景仿真功能后该系统的基本结构以及三维视景仿真系统。
该系统可真实直观地反映无人机飞行状态,它是基于Creator来实现无人机和场景建模,通过VC++加载VEGA软件来完成分布式仿真控制程序的设计。
系统模拟了无人机弹射起飞、巡航飞行及开伞降落等各飞行阶段的真实状态。
关键词无人机;三维视景;飞行仿真;仿真控制;仿真技术中图分类号:TP3 文献标识码:A 文章编号:1671-7597(2015)01-0036-03由于无人机具备成本低、灵活性强、便于隐蔽等诸多特点,其在军事和民用等领域的应用也越发广泛。
无人机系统主要由平台系统、任务系统和地面控制站操作系统几大部分组成,平台系统通过装载任务系统完成特定的飞行任务,地面控制站操作系统完成平台系统和任务系统的实时监测和控制,其手段主要依赖于地面操作人员对实时回传、分发的飞行状态数据和任务设备状态数据的监测,并根据对下发数据的综合判断向平台系统和任务系统做出操作指令[1]。
随着航空技术和电子技术的融合发展,飞行控制系统和任务系统的日趋复杂,发生故障隐患的可能性随之升高,导致无人机操作人员需要关注的数据量倍增。
若依然采用简单的数字直接显示或图表曲线的等数据回显方式,就要求操作人员要有丰富经验,才能依据大量并不直观数据综合判断出平台系统当前的飞行状态。
而三维视景仿真技术可有效解决该问题,由于该技术是计算机技术、图形图像处理与生成技术、多媒体技术、信息合成技术、显示技术等诸多高新技术的综合运用,可使非专业人员亦能无人机模拟训练系统中,对无人机状态有直观的感受,能有效缩短无人机操作人员的培训周期。
基于真实地形的无人机视景仿真系统设计和实现
ABSTRACTScene Simulation is a key branch of computer simulation, the Unmanned Aerial Vehicle (UA V) Scene Graph System is based on the theory of the virtual reality to show the real-time flight process of UA V, which could provides the truth for researching the flight rule of UA V.In traditional methods, terrain scene for UA V Scene Graph System is always built by random data, which has certain realism, but couldn’t match the real world, nor reflect the changes of terrain scene during the flight. with this background and based on the existing UA V Scene Graph System, real terrain modeling, collision check, network communication,large area terrain management are mainly studied in this paper.At last, achieve an UA V Scene Graph System based on real terrain.and design an UA V Simulative Training System based on this system.The main contributions of this dissertation are as follows:Firstly, some objects of scene simulation were discussed, including how to develop a scene simulation system, elements that build up a scene simulation system, some methods that used to display virtual scene in real time are studied as well, and the 3D model of the UA V is designed.Secondly, the digital representation form of 3D terrain, the access way of the real terrain elevation data and how to transform these raw datas to standard format are studied. Based on these real data and combined with Multigen Creator modeling environment, a 3D real terrain model of a certain region is built.Thirdly, in order to meet the demand of large area terrain scene real-time display in scene system, analysis the key techniques of large area terrain modeling,and focus on the theory and creation of virtual texture. Combined with CTS modeling environment, the model of large area terrain is set up.Finally, according to the demand of UA V simulation, some fuctions based on existing scene system are added, including collision check, network communication and large area terrain management, and the special effects fuction is improved. Through this work, the scene system becomes more realistic. At the end of this paper, an UA V Simulative Training System is designed to meet the needs of the flight test.The UA V Scene Graph System based on real terrain can be used for UA V flight control system simulation and UA V flight test, it has strong flexibilities and practicability.Key Words: UA V, scene simulation, 3D real terrain, Multigen Creator/CTS, Vega Prime图清单图1.1 无人机视景仿真系统基本体系框架 (3)图2.1 Multigen-Creator编辑界面图 (8)图2.2 Vega Prime系统结构图 (11)图2.3 低分辨率LOD模型 (12)图2.4 较高分辨率LOD模型 (13)图2.5 最高分辨率LOD模型 (13)图2.6 纹理映射示意图 (15)图2.7 添加纹理前模型 (15)图2.8 添加纹理后模型 (15)图2.9 放样构建无人机模型图 (16)图2.10 无人机层次结构视图 (17)图2.11 无人机三维模型图 (18)图3.1 MultiGen Creator地形建模流程 (22)图3.2 地形数据修复前 (23)图3.3 地形数据修复后 (23)图3.4 Creator地形构建图图 (23)图3.5 Polymesh算法地形 (26)图3.6 Delaunay算法地形 (26)图3.7 利用GetScreen截取卫星图片 (28)图3.8 修改后卫星照片 (29)图3.9 三点映射地形纹理 (30)图3.10 分块纹理与多分辨率纹理 (30)图3.11 Polymesh算法生成地形纹理映射后 (31)图3.12 Delaunay算法生成地形纹理映射后 (31)图3.13 DED文件的Creator地形窗口 (32)图3.14 纹理映射后单个地形块 (33)图3.15 Vega Prime中测试地形效果 (33)图3.16 格网堆栈原理图 (35)图3.17 虚拟纹理示意图 (36)南京航空航天大学硕士学位论文图3.18 虚拟纹理映射图 (37)图3.19 羽化效果 (37)图3.20 虚拟纹理数据库创建流程 (39)图3.21 地形数据库创建流程 (39)图3.22 MetaFlight格式 (40)图4.1 视景仿真系统开发流程 (42)图4.2 无人机视景仿真系统与无人机仿真环境连接示意图 (43)图4.3 UDP接收数据线程流程 (44)图4.4 典型包围盒 (45)图4.5 带有包围盒的物体 (45)图4.6 碰撞检测算法框架 (46)图4.7 Z与Los碰撞检测算法原理 (47)图4.8 大地形调度程序流程图 (50)图4.9 页面调度策略原理 (51)图4.10 仿真环境中的大地形模型 (52)图4.11 粒子系统工作流程图 (53)图4.12 无人机碰撞爆炸效果 (55)图4.13 系统总体方案图 (57)图4.14 采集视频信号流程图 (58)图4.15 平显画面 (58)图4.16 叠加前视景画面 (59)图4.17 叠加平显后的效果 (59)图5.1 系统登陆界面 (60)图5.2 主窗口运行界面 (61)图5.3 全屏运行界面 (61)图5.4 无人机爬升效果图 (62)图5.5 无人机滚转效果图 (62)图5.6 无人机下滑效果图 (62)图5.7 无人机平飞效果图 (62)图5.8 视景仿真系统连接到地面站环境实物图 (63)基于真实地形的无人机视景仿真系统设计与实现表清单表2.1 Creator与其它建模工具比较 (9)表3.1 地形转换算法对比 (25)表3.2 投影方式特点 (27)表4.1 Vega Prime特效模块 (54)南京航空航天大学硕士学位论文注释表略写英文全称中文名称UA V UnmannedAerialVehicle 无人驾驶飞机OpenGL Open Graphic Library 开放式图像库ACF Application Configuration File ACF文件LOD Level Of Details 层次细节简化DEM Digital Elevation Model 数字高程模型RSG Regular Square Grid 规则格网TIN Triangulated Irregular Network 不规则三角网USGS U.S. Geological Survey 美国地质调查局SRTM Shuttle Radar Topography Mission 航天飞机雷达地形测绘任务DED Dighal Elevation Data 数字高程数据IG ImageGenerator 图形生成器AABB Axis-AlignedBoundingBoxes 轴平行包围盒OBB Oriented Bounding Box 沿任意方向包围盒FDH Fixed Directions Hulls 固定方向包围盒AOI Areas-Of-Interest 感兴趣范围承诺书本人郑重声明:所呈交的学位论文,是本人在导师指导下,独立进行研究工作所取得的成果。
基于Vega Prime的飞行视景仿真研究与应用

基于Vega Prime的飞行视景仿真研究与应用钟文武;周新力;金慧琴;张烨【摘要】将视景仿真技术应用到任务规划系统中,能使用户在虚拟三维世界中预演任务规划,为作战效能评估提供直观的支持。
简要介绍了Creator,Terra Vista,Vega Prime等仿真工具,详细阐述了利用Terra Vista生成大规模三维地形的方法,包括数据的采集和处理,制作地形时各种参数的设置等,研究了Vega Prime 中飞行仿真相关模块,并重点阐述了大场景地形调度与管理的问题,最后结合实例实现了一个飞行任务预演仿真系统。
仿真结果表明,该系统场景逼真,运行流畅,能较好地模拟作战飞行任务。
%The visual simulation technology is applied to the mission planning system, which can let the user preview mis⁃sion planning in the virtual 3D world and provide intuitive support for operation effectiveness evaluation. This paper briefly introduces the simulation software Creator, Terra Vista and Vega Prime, expounds the use of Terra Vista to generate large scale 3D terrain, including data collection and processing, parameter setting of terrain, etc. In the paper, the related module of flight visual simulation in the Vega Prime is studied, and expounds the large scale terrain management. Finally, a flight mission rehearsal simulation system is developed. The experiment results showthat the system has vivid scene and smooth running, and can well simulate battle flight mission.【期刊名称】《指挥控制与仿真》【年(卷),期】2015(000)006【总页数】5页(P90-93,108)【关键词】飞行视景仿真;三维地形;Terra Vista;Vega Prime【作者】钟文武;周新力;金慧琴;张烨【作者单位】海军航空工程学院,山东烟台 264001;海军航空工程学院,山东烟台 264001;海军航空工程学院,山东烟台 264001;海军航空工程学院,山东烟台264001【正文语种】中文【中图分类】V221.92;E917数字地图和图像显示是飞行器任务规划系统(Mission Planning System,MPS)的重要组成部分。
基于Vega Prime的航天发射训练仿真视景控制方法
基于Vega Prime的航天发射训练仿真视景控制方法肖艳彬;刘党辉;王明俊;刘培杰;苏永芝【摘要】Simulation technology has provided an effective way of teaching and research for space launching tasks in universities. Ifs impractical for students to have genuine operations or tutorial in real scenarios. Due to the diversity and complexity of space launching tasks, it's inevitable to interact with 3D scenarios in the process of simulation. Visual control module is of great importance in space launching simulation. Vega Prime is real time scenario-driven software which supports object-oriented development. Taking the requirements of space launching tasks into account, firstly analyzed the scenario and object control techniques based on Vega Prime and proposed the visual control workflow combining MFC and Vega Prime. Then the major problems in implementation were discussed. Finally a demonstration was given.%仿真技术是解决院校在航天发射训练的教学、科研中,学员难以进行“真枪实弹”的操作与培训等问题的有效途径.由于航天发射任务的多样性和复杂性,在仿真过程中不可避免地要与三维场景交互,因此视景控制是航天发射训练仿真系统的重要环节.Vega Prime是一款支持面向对象技术的实时视景驱动软件,本文针对航天发射训练任务的视景仿真和人机交互要求,分析了基于Vega Prime的场景和对象控制技术,给出联合MFC和Vega Prime实现视景控制的流程,并讨论了实现中的一些主要问题,最后给出演示实例.【期刊名称】《新技术新工艺》【年(卷),期】2011(000)009【总页数】3页(P27-29)【关键词】航天发射;视景仿真;人机交互【作者】肖艳彬;刘党辉;王明俊;刘培杰;苏永芝【作者单位】装备指挥技术学院研究生院,北京101416;装备指挥技术学院航天装备系,北京101416;装备指挥技术学院信息装备系,北京101416;装备指挥技术学院研究生院,北京101416;装备指挥技术学院航天装备系,北京101416【正文语种】中文【中图分类】TP391.9航天发射具有实时性、高风险性、复杂性和不可逆性等特点,在院校教学、科研中,受时间、空间、设备和经费的限制,使学员难以进行“真枪实弹”的操作与培训,不能形象地了解航天发射任务的组织指挥流程。
无人机飞行控制仿真环境三维视景子系统设计
第23卷 第12期计 算 机 仿 真2006年12月 文章编号:1006-9348(2006)12-0038-05无人机飞行控制仿真环境三维视景子系统设计赵 龙,黄一敏(南京航空航天大学自动化学院,江苏南京210016)摘要:针对无人机飞行控制仿真环境以数据方式输出仿真结果不利于挖掘隐藏于数据中的本质特性的缺陷,借助虚拟现实技术的相关理论,设计实现基于无人机飞行控制仿真环境的三维视景子系统,实时动态再现无人机飞行运动全过程,为研究无人机飞行运动规律提供直观的事实根据。
阐述了无人机飞行控制仿真环境三维视景子系统设计实现的目标,构造了系统结构并提出了三维视景系统的实现框架,对视景系统实现的主要技术进行了着重介绍,在视景系统的具体实现中对视景数据库设计、视景系统开发、视点切换、LynX Pri me和ACF配置文件、数据通信接口的具体实现进行了详细的论述。
最后给出了系统的实施效果。
关键词:无人机;飞行控制;视景系统中图分类号:TP39119 文献标识码:AD esign of3D Scene Graph Subsystem Ba sedon S i m ula tion Env ironm en t for FCS of UAVZHAO Long,HUAN G Yi-m in(College of Automation Engineering,Nanjing University of Aeronautics and A stronautics,Nanjing J iangsu210016,China)ABSTRACT:A i med at the li m itation of the output in data for m of the si mulation environment for Flight ControlSystem(FCS)of Unmanned Aerial Vehicle(UAV),and based on the visual reality theory,the paper designs a3D scene graph subsystem based on si mulation environment for Flight Control System of Unmanned AerialVehicle,that could show the real-ti me flight p rocess of UAV and p rovide the truth for researching the flight ruleof UAV1The paper expounds the design objective of the design of3D scene graph subsystem based on si mulationenvironment for Flight Control System of Unmanned Aerial Vehicle,constructs the configuration of the systemand the framework of the3D scene graph subsystem,introduces the key technology for realizing the3D scenegraph subsystem,discusses the design of the3D scene graph database,the development of the3D scene graphsubsystem,the s w itch of the angle of view,the Lynx Pri m e and the ACF configuration file,the interface of thedata communications and show s the effect lastly1KEYWO RD S:UAV;FCS;Scene graph system1 引言近年来,随着无人机飞行功能的增加,其飞行控制系统日趋复杂,发生故障的可能性越来越大。
基于Vega Prime的弹道视景准实时仿真研究
Q 1 Z h u c h a n g , L I U L i ,L O N G T e n g , X I N G C h a o ( S c h o o l o f A e r o s p a c e E n g i n e e r i n g , B e i j i n g I n s t i t u t e o f T e c h n o l o g y , B e i j i n g 1 0 0 0 8 1 , C h i n a )
d a t a c r o s s — p r o c e s s e x c h a n g e b e t we e n t r a j e c t o y r s i mu l a t i o n a n d s c e n e s i mu l a t i o n wa i s i mp l e me n t e d u s i n g me mo y r ma p p i n g i f l e t e c h n o l o g y . T h e me t h o d’ S a v a i l a b i l i t y wa s v e r i i f e d b y t h e t r a j e c t o r y s c e n e q u a s i — r e a l — t i me s i mu l a t i o n p r o g r a m d e v e l o p e d t h r o u g h u s i n g C+ + t o c a l l V e g a P r i me AP I f u n c t i o n i n. N E T f r a me .T h e d e s i g n e r c a n o b s e r v e a n d a n a l y z e mi s s i l e l f i g h t s t a t u s t h r o u g h t h e t r a j e c t o y r s c e n e s i mu l a t i o n, a n d p r o v i d e t h e r e f e r e n c e f o r t h e t r a j e c t o y r a n a l y s i s a n d d e s i g n .
基于CTS和VegaPrime的视景仿真研究及应用

基金项目:国家“863”计划资助项目(2002AA712028)收稿日期:2006-07-21 修回日期:2006-09-03 第24卷 第9期计 算 机 仿 真2007年9月 文章编号:1006-9348(2007)09-0176-04基于CTS 和Vega Pr i m e 的视景仿真研究及应用高岩,杨华民,狄超,周志成(长春理工大学,吉林长春130022)摘要:视景仿真技术做为一种前沿的科学技术,现已广泛地应用在各种领域中。
文中介绍了目前流行的视景仿真软件及开发流程。
在实际应用中,传统的方法在产生和管理地形数据方面效率不高。
为解决该问题,文中重点阐述了Creat or TerrainStudi o (CTS )在管理海量地形数据方面的优势。
研究了一种使用OpenFlight AP I 进行地形调度的方法,该方法既利用了CTS在产生地形数据方面的优点同时提高了算法的可读性。
最后使用CTS 和Vega Pri m e 等开发工具结合具体实例成功地建立了视景仿真环境,画面运行流畅,达到了很好的可视化效果。
关键词:视景仿真;地形调度;可视化中图分类号:TP317.4 文献标识码:BResearch and Appli ca ti on of Scene S i m ul a ti onBa sed on CTS and Vega Pr i m eG AO Yan,Y ANG Hua -m in,D I Chao,ZHOU Zhi -cheng(Changchun University of Science and Technol ogy,Changchun J ilin 130022,China )ABSTRACT:V isi on -scene e mulati on is an outlying technol ogy,It is widely used in many fields recently .This pa 2per intr oduces the popular s oft w are of V isi on -scene e mulati on and the devel opment fl ow .I n p ractice,traditi onalmethods ’efficiency is l ower in p r oducing and managing terrain data.Theref ore,this paper stresses on expatiating the p redom inance of Creat or Terrain Studi o (CTS )in managing large nu mbers of terrain data .It researches a method f or attempering terrain by using OpenFlight AP I .This method makes use of the excellence of CTS in p r oducing terrain data,mean while,it i m p r oves the readability of algorith m ic .I n conclusi on,the paper successfully establishes the en 2vir on ment of visi on -scene emulati on using CTS and Vega Pri m e combining with concrete instance .It runs s moothly and achieves excellent effect of visualizati on .KE YWO RD S:Scene e mulati on;Method f or atte mpering terrain;V isualizati on1 引言视景仿真属于空间信息可视化仿真,其目标是使用户能够与真实三维世界的可视化模型进行实时的可控制的交互,即在虚拟环境中体验真实世界。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 三维视景仿真环境简介
1.1 Creator 建模环境
Creator 是 Multigen 公 司 创 建 的 一 个 实 时 仿 真 建 模软件, 它拥有独创的用于描述三维虚拟场景的层次 化数据结— ——OpenFlight 数据结构。这是一种树形的层 次化结构,采用这种结构主要 基 于 两 点 考 虑[1]:一 是 这 种结构可以方便地将模型按照几何特性进行有效地组 织, 并将其转化为能够方便地进行编辑和移动的节点 的形式; 二是这种树形结构非常适合实时系统进行各 种遍历操作。 其中,所谓的节点(node)就是建构层次化 模型数据库最基本的元素或模块。 利用 Creator 构造出 的模型能与实时仿真软件紧密结合[2]。
vpWindow*vpWin=*vpWindow::begin(); vpWin->setParent(PublicMember::CTS_RunningWindow); vpWin->setBorderEnable(false); vpWin->setFullScreenEnable(true); vpWin->open();
层次结构应尽可能简单明了, 这样既便于模型的读取 和移动,也方便用户根据个人需求进行相关修改。 由于 要 时 实 地 描 绘 出 无 人 机 的 飞 行 过 程 [9],包 括 在 细 节 方 面 无人机舵面的偏转和螺旋桨的转动, 就必须要使无人 机的局部能够相互独立分解运动, 这就要用到 Creator 工具中的自由度节点 DOF[10~11]。 根据实际情况,需要设 置 6 个 DOF 节点,其中 1 个为飞机的主体节点,5 个为 舵机节点。 要使舵机的偏转建立在整个机身偏转的基 础上,舵机的 DOF 节点必须以飞机的主体节点为父节 点,当视点离无人机较远时,使用多边形数相对较少的 细节层次节点 LOD 显示无人机,这时候无人机模型是 很简单很粗糙的;随着视点向无人机移动,会用一个复 杂的 LOD 代替前一个 LOD 节点,反之亦然。
Vega Prime 包含所有创建实时三维虚拟现实应用 程 序 的 API[3],但 还 是 专 门 设 计 了 LynX Prime。 LynX Prime 能够简化应用程序的开发过程 , 不通过 编 写 代 码,只是通过可视化的编辑界面进行配置,就能够开发 出实时三维虚拟现实应用程序。 通过 LynX Prime[7],开 发人员可以添加类的实例对象, 并为这些对象定义参 数。 这些参数都存储在一个应用程序的实例框架中,形 成一个应用程序配置文件(Application Configuration File, ACF)。 这个应用程序配置文件包含一个 Vega Prime 应 用 程 序 初 始 化 和 运 行 时 所 需 要 的 信 息 。 同 时 ,LynX Prime 还提供了一个预览功能,让开发人员对实时三维 虚拟现实应用程序的开发达到所见即所得的效果。
现代计算机 2013.08 中 趹趫
开发案例
序主要解决两个问题: ①在什么地方执行 VP 的主循环; ②在哪个窗口显示 VP 场景。 对于第一个问题的解决,只有一个方法,就是要在
MFC 对话框程序里 启 动 一 个 工 作 者 线 程[13],在 线 程 的 主函数里初始化 VP 和执行主循环;而第二个问题,就 是 确 定 VP 窗 口 的 父 窗 口 ,VP 的 场 景 在 父 窗 口 上 显 示,具体就是把父窗口的句柄传给函数 setParent()。
开发案例
文 章 编 号 :1007-1423(2013)23-0085-05
DOI:10.3969/j.issn.1007-1423.2013.23.023
基于 MFC 和 Vega Prime 的无人机三维视景仿真实现
丁梦雨 , 芦利斌 , 金国栋
(第二炮兵工程大学 907 教研室, 西安 710025)
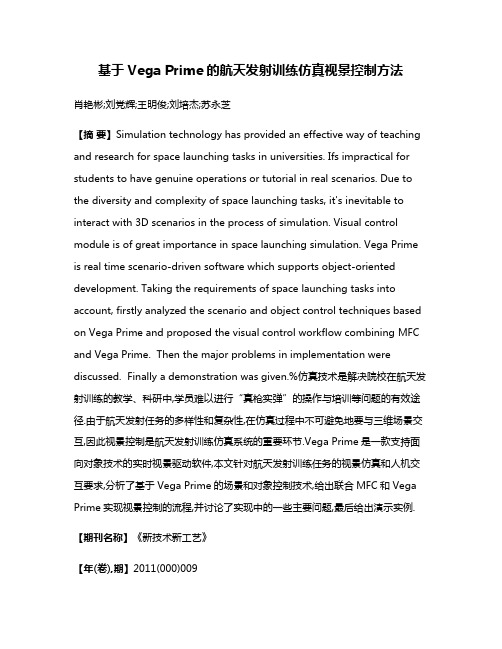
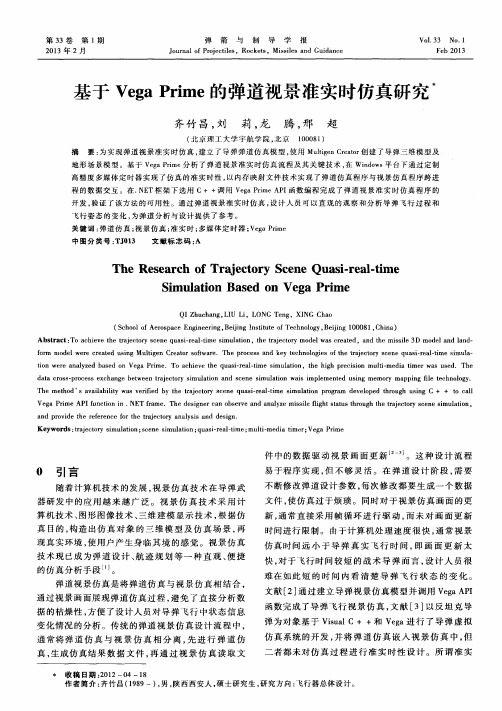
,,,,,
Creator,,
,,,,
, ,.f lt, ,
MAT,,
Lynx Prime, ,,,
Vega Prime, ,
,,,,
图 1 系统总体设计流程图
用 Creator 建 模 的 传 统 方 法 是 运 用 它 的 面 体 基 本 工具相互组合构建规则模型 (无人机测控实验三维可 视 化 研 究 )[4],而 无 人 机 的 机 身 部 分 显 然 是 不 规 则 体 , 不 能用规则的几何体工具来建立实体模型,因此,就需要 利 用 Loft Tool (连 接 体 工 具 ,也 称 放 样 工 具)技 术 来 构 建。 在模型设计界面中加入准备好的无人机视图,设置 网格大小对齐背景图后,就可以制作物体剖面图,然后 使 用 放 样 工 具 生 成 模 型 大 体 形 状 [12],它 用 于 将 一 组 截 面 多边形连接生成为一个三维实体。 在背景图上,通过分 析无人机自身的几何特征, 将各个剖面多边形放到合 适的位置,调整好其倾斜的角度,从而整合形成一个完
趷趫 现代计算机 2013.08 中
开发案例
整的机身。 相比较传统模型的建立,这种方法大大减少 了操作人员建模的工作量。 在完成了无人机各部分的 建模工作后,贴上纹理图片,就可以得到一个完整的无 人机仿真模型,如图 2 所示。
图 2 无人机仿真模型图
3.2 地形场景模型的建立 Creator 是用海拔数据来生成 OpenFlight 格式的地
收稿日期:2013-06-14 修稿日期:2013-07-15 作 者 简 介 :丁 梦 雨 (1989-),女 ,黑 龙 江 哈 尔 滨 人 ,硕 士 研 究 生 ,研 究 方 向 为 无 人 机 地 面 控 制 站
现代计算机 2013.08 中 趶趫
开发案例
序[2], 同时 Vega Prime 软件也融入了许多新的特性,这 将更好地为用户快速地创建、 编辑和运行复杂的三维 视景仿真应用。
VP 应用程序的主线程函数如下所示:
UINT PublicMember::CTS_RunBasicThread(LPVOID) {
vp::initialize(__argc,__argv); PublicMember::CTS_Define(); vpKernel::instance()->configure();
Creator 主要包括两个窗口: 应用程序窗口和数据 库窗口。 Creator 的大部分工作都是在应用程序主窗口 内的模型数据库窗口中进行的, 用户可以使用 Creator 的工具条、建模工具或者菜单命令,在数据库窗口内完 成创建模型、调整视图、编辑模型等多种操作[1]。 1.2 Vega Prime 视景仿真环境
3.3 视景驱动的实现 利用 Vega Prime 软件开发视景平台,主要包括两
个步骤:①利用 LynX Prime 建立底层模型,生成 *.acf 文件;②编写 Vega Prime 应用程序,驱动场景,完成视 景平台。
LynX Prime 只 是 用 来 设 定 和 预 览 Vega Prime 应 用程序的图形式用户界面, 可以进行简单的程序初始 化和设置, 对于高级仿真设计则需要利用 Vega Prime 提供的完整的 C 语言应用程序接口(API)编制仿真程序。 在 Windows 平 台 上 建 立 Vega Prime 应 用 程 序 有 两 种 较为典型的开发方式。 最简单的一种是 Windows 的“控 制台应用程序”[16]。 和传统的控制台程序一样, 入口是 常规的 main()。 另一种是基于 MFC (Microsoft Foundation Class)的应用程序,如图 4 所示,它使用 WinMain() 入口。 用户可以根据需要进行选择。
Vega Prime 是 Multigen 公司推出的最新虚拟现实 开发工具,具有面向对象、功能强大、界面友好、平台兼 容性好等特点。 它是一个进行实时仿真和虚拟现实开 发 的 高 性 能 软 件 环 境 和 良 好 工 具 [3],能 高 效 地 创 建 和 配 置视景仿真、基于仿真的训练、通用可视化等应用程
关键词: 无人机; Creator 建模; Vega Prime; MFC; 视景仿真
0 引言
近年来, 无人机在民用和军事领域都发挥着越来 越重要的作用。 随着无人机飞行功能的日益完善,使得 其飞控系统日趋复杂化,这就需要采集大量的数据。 通 常无人机地面站的数据回显功能主要由参数来直接显 示,这样不够直观,对于非专业操作人员来说,无法快 速直观地读取无人机的飞行状态。 同时,无人机飞行实 验具有高风险、高成本的特点,因此,开发一个能够满 足无人机试飞实验的三维视景仿真系统, 具有其特殊 意义和重要性。 无人机三维视景仿真是利用三维图像 来实现无人机的飞行过程,实时地再现其飞行状态。 操 作人员通过观察三维仿真视景中无人机的飞行姿态, 可以直接判断出无人机的飞行状态, 这样就大大减少 操作人员的工作量。 三维视景仿真是在虚拟现实技术 的基础上,综合计算机、图像、计算机交互及数据传输 等技术进行可视化显示的一个重要技术, 它能够实时 动态地再现无人机飞行全过程, 为今后研究无人机整 个运动过程提供直观易懂的事实依据。
形 数 据 库 [14~15],而 不 同 的 海 拔 数 据 又 具 有 不 同 的 清 晰 度 和格式。 只有把海拔数据转化成 Creator 内部的DED 格 式,才能输入 Creator 并继续生产地形数据库。 地形场 景的建立对整个三维视景有着至关重要的作用, 它能 够真实逼真地反映外部世界,让仿真更具真实感。 建立 一个视景仿真应用的地形是一个非常复杂的工作,一 般构造真实地形的步骤是先导入记录真实地理信息的 原始地形数据,设置地形转换算法,应用地形纹理,映 射地形特征数据,然后批处理生成地形模型数据库。 最 后,在铺好纹理的地形上导入各种地形特征后,一个完 整的地形场景模型就建立完成了,如图 3 所示。