空间七杆机构位置解析与空间六杆机器人机构位置逆解
6轴机械臂逆解算法

6轴机械臂逆解算法6轴机械臂逆解算法是一个复杂的计算过程,它使得机械臂能够准确地执行特定的动作。
逆解算法可以通过一系列的计算步骤来确定末端执行器的位置和方向,以及机械臂所需的联动角度。
在本文中,我们将介绍一些6轴机械臂逆解算法的相关内容。
1. 机械臂的基本构造6轴机械臂是由六个可旋转的关节连接起来的。
每个关节都有一个旋转轴,并可以控制角度的大小。
关节1连接到机械臂的底座上,是机械臂的第一个旋转轴。
关节2到关节6相继连接,构成了一个分层结构,使得机械臂具有更高的灵活性和精度。
2. 机械臂的逆解算法机械臂的逆解算法主要是通过末端执行器的位置和方向来计算机械臂各个关节的角度。
具体算法步骤如下:(1)首先,通过末端执行器的位置和方向计算出关节6的角度。
(2)然后,通过旋转关节6,使末端执行器在关节6的平面上,这样得到一个新的点P1。
(3)接下来,通过新点P1和关节1之间的向量计算出关节1和关节2的角度。
(4)然后,通过旋转关节1和关节2,使机械臂的第二个平面与新点P1的平面重合,这时得到一个新的点P2。
(5)通过新点P2和关节1之间的向量计算出关节3的角度。
(6)接着通过旋转关节1、关节2和关节3,使机械臂的第三个平面与新点P2的平面重合,这时得到一个新的点P3。
(7)通过新点P3和关节1之间的向量计算出关节4的角度。
(8)接着通过旋转关节1、关节2、关节3和关节4,使机械臂的第四个平面与新点P3的平面重合,这时得到一个新的点P4。
(9)最后,通过新点P4和关节1之间的向量计算出关节5的角度。
3. 相关算法优化在机械臂逆解算法的计算过程中,存在一些误差。
这些误差主要来自于机械臂的几何特性、测量误差以及控制系统的误差。
为了降低这些误差,可以对逆解算法进行一定的优化。
(1)减少角度计算误差:在进行角度计算时,可以使用高精度数学库来降低计算误差。
(2)机械臂运动轨迹规划:通过机械臂运动轨迹规划,可以优化机械臂的运动路径,从而减少运动时的误差。
6轴机械臂逆解算法

6轴机械臂逆解算法一、前言机械臂是一种能够模拟人类手臂运动的机器人,具有广泛的应用领域,如工业生产线、医疗手术、军事等。
其中,6轴机械臂是应用最广泛的一种机械臂,其具有灵活性高、精度高等特点。
而6轴机械臂逆解算法则是实现其运动控制的核心算法。
二、6轴机械臂基本结构6轴机械臂由底座、第1个旋转关节、第2个旋转关节、第3个旋转关节、第4个旋转关节、第5个旋转关节和末端执行器组成。
其中,每个旋转关节都可以使机械臂在相应方向上进行运动。
三、逆解算法逆解算法是指根据期望的末端执行器位置和姿态,计算出对应的各个旋转关节角度的过程。
在6轴机械臂中,逆解算法需要求解出每一个旋转关节所对应的角度值。
四、基于几何方法的逆解算法1. 坐标系变换首先需要将目标坐标系与基坐标系进行变换,使得末端执行器的位置和姿态在目标坐标系下表示。
这里需要用到矩阵变换的方法,将目标坐标系下的位置和姿态转化为基坐标系下的位置和姿态。
2. 末端执行器位置计算根据机械臂的结构和各个旋转关节的角度,可以求解出末端执行器在基坐标系下的位置。
这里需要用到正向运动学算法。
3. 逆解算法在已知末端执行器在基坐标系下的位置和姿态时,可以通过逆向运动学算法求解出每一个旋转关节所对应的角度值。
其中,需要用到三角函数、向量点乘等数学知识。
五、基于雅克比矩阵方法的逆解算法雅克比矩阵是指机械臂末端执行器位移与各个旋转关节角度变化之间的关系矩阵。
通过雅克比矩阵可以快速计算出各个旋转关节所对应的角度值。
1. 雅克比矩阵计算首先需要计算出机械臂末端执行器位移与各个旋转关节角度变化之间的关系,即雅克比矩阵。
这里需要用到向量叉乘、向量点乘等数学知识。
2. 逆解算法在已知末端执行器在基坐标系下的位置和姿态时,可以通过雅克比矩阵求解出每一个旋转关节所对应的角度值。
这里需要用到矩阵求逆、矩阵转置等数学知识。
六、总结6轴机械臂逆解算法是实现机械臂运动控制的核心算法之一,其基于几何方法和雅克比矩阵方法两种不同的思路,可以快速计算出各个旋转关节所对应的角度值。
空间6R机器人位置反解的对偶四元数法_倪振松

Abstract:Complex exponential form of dual four elements is introduced into the inverse kinematics analysis of serial mechanisms. A new algorithm is proposed for the inverse solution of space 6R serial mechanism. The mathematical model is established for the space 6R serial mechanism by adopting complex exponential form and dual four elements. A 6×6 matrix is obtained from the Dixon
倪振松等:空间 6R 机器人位置反解的对偶四元数法
27
对于 6R 机械手操作臂,Байду номын сангаас照此规定从基础到
机器手末端位置,最终可得到的对偶四元数变换方
程为
Q1z (θ1, s1)Q1x (α12 , a12 )Q2z (θ2 , s2 )Q2x (α23 , a23 ) ⋅ ⋅ ⋅
Q6z (θ6 , s6 )Q6x (α61, a61) = Q
是可行的,但是无法得到全部解,而且有迭代不收 敛的危险。因此解析解或代数求解就变得有意义了。
许多学者在分析一般 6R 机器人的逆运动学问 题方面做出了巨大贡献。DUFFY[1]在 20 世纪 80 年 代试图利用球面三角法进行 6R 机械手的求解,得 到了一元 32 次方程。TSAI 等[2]运用高维逼近分析 逆运动学问题,将问题简化为 8 个二次方程并采用 多项式的连续方法进行数值求解,推测出对不同结 构 的 各 种 6R 机 器 人 最 多 只 有 16 解 的 结 论 。 PRIMROSE[3]首次给出了该结论的证明,并指出剩 余的 16 解是纯虚根。在此基础之上,廖启征等[4-5]
六轴机械臂逆运动学原理及仿真设计
六轴机械臂逆运动学原理及仿真设计六轴机械臂是一种具有六个自由度的机械臂。
当我们需要控制六轴机械臂的末端执行器来到指定的位置与姿态时,就需要通过逆运动学求解出相应的关节角度。
六轴机械臂的逆运动学求解过程分为两个步骤:位置逆解和姿态逆解。
1.位置逆解位置逆解是指已知机械臂末端执行器在笛卡尔坐标系中的位置,求解出机械臂关节角度的过程。
在位置逆解中,主要考虑机械臂的几何结构,例如机械臂的连杆长度和偏移量等。
根据这些几何结构以及末端执行器的位置,可以通过三角函数等几何关系计算出关节角度。
2.姿态逆解姿态逆解是指已知机械臂末端执行器在笛卡尔坐标系中的姿态,求解出机械臂关节角度的过程。
在姿态逆解中,主要考虑机械臂的末端执行器与末端坐标系的相对关系。
根据末端执行器的位置和姿态,可以通过矩阵运算计算出机械臂的旋转矩阵,从而求解出关节角度。
对于六轴机械臂的位置逆解和姿态逆解,可以根据具体的问题选择不同的方法进行求解。
常见的方法包括解析解法和数值解法。
解析解法是指通过代数推导求解解析表达式的方法,具有较高的精确度和计算效率,但是只适用于一些特定的问题。
数值解法是指通过迭代计算求解近似解的方法,具有较高的适用性,但精确度和计算效率较低。
在进行六轴机械臂逆运动学的仿真设计时,可以使用相关的机器人建模软件,例如MATLAB、SolidWorks等。
通过这些软件,可以构建机械臂的三维模型,并设置末端执行器的位置与姿态。
然后,通过编写相应的逆运动学算法,求解出机械臂的关节角度,并将结果反馈给机械臂模型,实现机械臂的仿真运动。
总结起来,六轴机械臂逆运动学原理及仿真设计是一项重要的研究内容。
逆运动学求解是实现机械臂精确运动的关键,而仿真设计则可以有效地验证逆运动学算法的正确性和可行性。
通过进一步研究和改进,可以提高六轴机械臂的运动精度和自主控制能力,为机器人技术的发展做出贡献。
6轴机械臂逆解算法

6轴机械臂逆解算法# 6轴机械臂逆解算法机械臂是一种用于自动化操作的重要设备,其具有多个自由度,可以完成各种复杂任务。
而逆解算法则是机械臂控制中的重要环节之一,它能够根据给定的目标点位置,计算出机械臂各关节角度的解。
## 1. 简介逆解算法是机械臂运动学中的一项关键任务,它能够把机械臂末端点坐标转化为各个关节的角度,从而实现目标位置的精确控制。
通常情况下,机械臂的逆解算法有多种方法可以选择,其中最常用的就是基于解析解和数值解的方法。
## 2. 基于解析解的逆解算法基于解析解的逆解算法是一种通过代数方法求解机械臂逆运动学问题的方法。
它通常通过建立机械臂的正运动学方程和逆运动学方程之间的关系来计算逆解。
在这种方法中,逆运动学方程通常是非线性的,因此需要使用比较复杂的数学推导和计算方法来获得解析解。
一种常用的基于解析解的逆解算法是迭代法,其中通过迭代计算逆运动学方程,直到满足设定的精度要求。
此外,还有一些其他的基于解析解的逆解算法,如雅可比转置法和雅可比伪逆法等。
这些方法都能够计算出机械臂的逆解,但其求解速度和精度会有所不同。
## 3. 基于数值解的逆解算法基于数值解的逆解算法是一种通过迭代计算的方法来求解机械臂逆运动学问题的方法。
它通常通过建立机械臂的正运动学方程和逆运动学方程之间的关系,并使用数值计算方法来求解逆解。
在这种方法中,逆运动学方程可以表示为一个优化问题,通过最小化目标函数来求解关节角度。
常用的基于数值解的逆解算法有很多种,如牛顿-拉夫逊法、拟牛顿法和遗传算法等。
这些方法通常需要使用数值优化算法来求解非线性方程组,从而得到机械臂的逆解。
相比于基于解析解的方法,基于数值解的算法在求解速度上更快,但精度方面可能稍差一些。
## 4. 应用6轴机械臂逆解算法在工业自动化中有着广泛的应用。
它能够实现机械臂对各种复杂任务的精确控制,如装配、搬运和焊接等。
此外,逆解算法还能够用于机械臂的轨迹规划和碰撞检测等方面,从而保证机械臂的安全和效率。
6轴机械臂逆解算法

6轴机械臂逆解算法机械臂逆解算法是指通过已知的目标姿态和末端执行器的位姿,计算出相应的关节角度。
在机械臂的控制中,逆解算法是十分重要的一部分,它能够帮助机械臂实现目标位置和姿态的精确控制。
一种常用的逆解算法是基于几何关系的方法,其基本原理是根据机械臂的结构和运动学,将目标位姿转化为关节角度。
下面是一个具体的逆解算法的示例。
假设机械臂有6个关节,每个关节的旋转角度分别为θ1、θ2、θ3、θ4、θ5和θ6。
机械臂的末端执行器的位姿可以通过欧拉角或四元数表示,其中包括位置(x, y, z)和姿态(rx, ry, rz)。
1. 根据机械臂的结构和坐标系,确定机械臂的正运动学方程。
这可以通过矩阵乘法来表示。
例如,可以使用旋转矩阵和平移矩阵将目标位姿转化为机械臂末端执行器的位姿。
2. 根据关节的限制和物理特性,确定关节的解空间。
关节的解空间是指关节能够取到的有效角度范围。
这可以通过关节的旋转范围和机械臂的物理限制来确定。
3. 根据逆运动学的基本原理,使用几何关系求解关节角度。
这可以通过正运动学方程的逆运算来实现。
例如,可以通过矩阵的逆运算来计算出关节角度。
4. 对于给定的目标位姿,根据机械臂的结构和运动学,计算出相应的关节角度,并检查其是否在关节的解空间内。
如果关节角度不在解空间内,则需要进行适当的调整。
5. 将计算得到的关节角度发送给机械臂的控制系统,以实现机械臂的精确控制。
除了几何关系方法,还有其他的逆解算法,例如基于数值方法的迭代算法和基于优化方法的求解算法。
这些方法对于复杂的机械臂和非线性约束的逆解问题更加有效。
总结起来,机械臂逆解算法是实现机械臂精确控制的关键一步。
通过确定机械臂的正运动学方程、关节的解空间以及使用几何关系等方法,可以计算出目标位姿对应的关节角度。
逆解算法在机械臂的应用领域具有广泛的应用前景,例如工业自动化、医疗机器人和服务机器人等领域。
基于ADAMS的6自由度机器人的正解与逆解

基于ADAMS的6自由度机器人的正解与逆解陆由斌,胡国栋,吕健,刘加磊【摘要】利用矩阵求解机器人的正解和逆解来研究机器人的运动学和动力学的方法较为普遍,但计算量大且容易出错,本文应用ADAMS 软件设立一般点运动设定机器人的末端运动轨迹,方便的求得了机器人各轴的位置运动曲线,为机器人的设计定型和物理样机的设计提供分析依据。
【期刊名称】机电产品开发与创新【年(卷),期】2010(023)005【总页数】2【关键词】ADAMS 软件;运动学分析;正解;逆解0 引言机器人运动学就是要建立各种运动构件和末端执行器空间的位置、姿态之间的关系,为机器人位置的控制提供分析的手段和方法。
在机器人的运动学研究中,存在着两类基本问题:一是正解问题;二是逆解问题。
在这两类问题中,正解问题是简单的,而且其解是唯一的,相比之下求解逆问题则要复杂的多,而且其解具有多解性,并存在着各关节变量之间的耦合,这给问题的求解带来了困难,往往要借助数学技巧以及实际工程应用对其模型进行简化,以求得最佳近似解。
在以往求解机器人逆解问题时,需要根据机器人的机械结构列出机器人的手部和驱动器之间的矩阵方程进行计算,计算复杂且计算量大,浪费大量的时间和人力。
利用ADAMS软件可以方便的分析机器人的动力学性能,为机器人的设计定型和物理样机的设计提供分析依据。
1 建立机器人的样机模型在三维软件中对机器人进行建模并赋予材料属性,为了尽可能地简化虚拟样机模型,在虚拟样机仿真运动完整的前提下,三维模型的零件数量应尽可能的少,因此,只保留主要的部件,忽略诸如螺钉、螺母、密封圈等小零件后导入ADAMS,在ADAMS 操作环境中,对机器人模型的各个部件进行运动约束,底座和大地、各电机和机器人、电机座和小臂杆、焊钳和手腕等均采用固定副连接;所有小件和各自的部件装配体采用合并的方式;各转动轴采用旋转铰链连接;平衡缸导杆和导套之间建立移动副。
为了让虚拟样机各装配体的质心与质量和理论实体的相同,可以在ADAMS 软件中对其质量和质心进行修改,使其质量和空间整体布局等和物理样机基本相当。
机器人正反解方法概述
机器人正反解方法概述引言 机器人运动学是机器人学的基础,是描述机器人运动过程中,各个关节及末端执行器的变化情况。
它涉及到两个方面的内容:即机器人正运动学和逆运动学。
机器人正运动学是已知机器人的连杆参数和各个关节变量,求解机器人末端执行器的位置和姿态;而机器人逆运动学恰好相反,是已知其末端执行器的位置和姿态,求解机器人的各个关节变量。
因此,求解机器人位置正反解的方法成为机器人设计中重要的内容。
机器人逆运动学比正运动学问题复杂得多,并且随着机器人自由度的增加,对于逆运动学问题的求解会越来越复杂。
由于机器人逆解的准确性以及求解速度的快慢会直接影响机器人的实时控制,因此国内外研究机器人逆解的求解算法比较多。
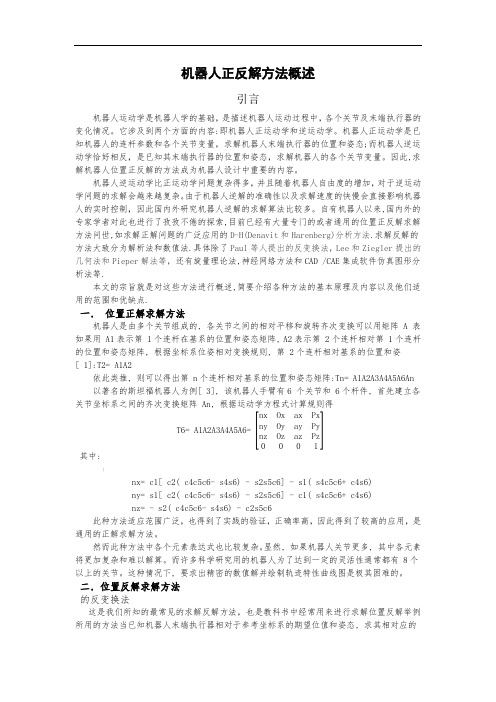
自有机器人以来,国内外的专家学者对此也进行了孜孜不倦的探索,目前已经有大量专门的或者通用的位置正反解求解方法问世,如求解正解问题的广泛应用的D-H(Denavit 和Harenberg)分析方法.求解反解的方法大致分为解析法和数值法.具体除了Paul 等人提出的反变换法,Lee 和Ziegler 提出的几何法和Pieper 解法等,还有旋量理论法,神经网络方法和CAD /CAE 集成软件仿真图形分析法等.本文的宗旨就是对这些方法进行概述,简要介绍各种方法的基本原理及内容以及他们适用的范围和优缺点.一. 位置正解求解方法机器人是由多个关节组成的, 各关节之间的相对平移和旋转齐次变换可以用矩阵 A 表如果用 A1表示第 1个连杆在基系的位置和姿态矩阵, A2表示第 2个连杆相对第 1个连杆的位置和姿态矩阵, 根据坐标系位姿相对变换规则, 第 2个连杆相对基系的位置和姿[ 1]:T2= A1A2依此类推, 则可以得出第 n 个连杆相对基系的位置和姿态矩阵:Tn= A1A2A3A4A5A6An 以著名的斯坦福机器人为例[ 3], 该机器人手臂有6 个关节和 6个杆件, 首先建立各关节坐标系之间的齐次变换矩阵 An, 根据运动学方程式计算规则得T6= A1A2A3A4A5A6= [nx Ox ny Oy ax Pxay Py nz Oz 00az Pz01] 其中:{nx= c1[ c2( c4c5c6- s4s6) - s2s5c6] - s1( s4c5c6+ c4s6)ny= s1[ c2( c4c5c6- s4s6) - s2s5c6] - c1( s4c5c6+ c4s6)nz= - s2( c4c5c6- s4s6) - c2s5c6此种方法适应范围广泛,也得到了实践的验证,正确率高,因此得到了较高的应用,是通用的正解求解方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( i, j = 1 ~ 7) 已经给
定 , 因此当机构的关节角 1 给定后, 利用空间连杆 机构中空间向量的坐标转换方法 , 从向量 s7 开始, 可以很容易求出向量 s2 的值。当得到向量 s7 和 s2 后 , 就可以求出由构件 7 和构件 2 形成的 RR 类型
图 2 七杆 7 R 机构向 空间的转换
The Displ acement Anal ysis of the Spatial 7-link Mechanism and the Inverse Displ acement Solution of Spatial 6l ink Manipulator
1 1 2 1 DU Hait ao , CHU Jin-kui , Wat anabe Kat sumi , GU O Xiao -ning
收稿日期 : 19991021 责任编辑 韩星明 王卫勋 基金项目 : 国家自然科学基金资助项目 ( 59575009) 。 作者简介 : 杜海涛 ( 1975-) , 男 , 西安理工大学硕士研究生。
[ 1~ 4]
396
西安理工大学学报 ( 2000) 第 16 卷第 4 期
入的空间构形刚化, 即把机构的输入构件和机构的机架相固联, 通过研究这些空间框架模型来得到 机构的各个结构参数。同样把空间六杆 6R 六自由度机器人机构的末端执行器与它的机架相固联, 通过研究这个空间框架模型就可得到机器人机构的各个结构参数。由于空间六杆 6R 六自由度机器 人机构可以被看做一个空间七杆 7R 机构 , 因此利用这种把机构的输入构件和它的机架固联的方法 , 就可以把求解空间单环机构的位置分析和机器人机构的位置逆解问题的方法统一起来。
1 框架模型的建立
1. 1 复合构件参数的计算 ( RR 复合构件 ) 已知 2 个运动副( R 副 ) 轴线上的 2 点 RA = { x A , y A , z A } T 和
T T RB = { x B , y B , z B } 及其单位矢量 sA = { l A , m A , nA } 、 sB = { lB , m B ,
西安理工大学学报 Jo ur nal of Xi ’ an U niversity o f T echnology ( 2000) V ol . 16 N o. 4 文章编号 : 10064710( 2000) 04039505
395
空间七杆机构位置解析与空间六杆 机器人机构位置逆解
杜海涛1 , 褚金奎1 , 渡边克己2 , 郭晓宁1
2 框架模型的求解
对框架模型分析后可知 , 它的位移分析的求解方法与求解具有一般约束的空间七杆 7R 机构的 方法相似, 只不过模型的分析中不涉及到输入角。空间七杆 7R 机构和空间六杆 6R 机器人机构转换 为空间框架模型后 , 待求量仍是 6 个 , 都为模型的关节角。 通过近年来的研究表明 , 一般空间七杆 7R 机构的位移分析和空间六杆 6R 机器人机构位置逆解 就是推导关于输出角正切半角的多项式 16 次方程, 当这 2 个机构转换为空间框架模型后 , 求解这个 模型的位置同样需推导出输出角正切半角的多项式 16 次方程。 因此求解模型位置的一个关键性的工 作是通过对 6 个待求的关节角进行消元, 最终得到关于输出角正切半角的 16 次多项式方程。消元的 第一步是先根据模型的特点建立适当的求解方程, 在本文中利用空间机构的向量分析方法 , 参照和利 用 J. Duf fy 的递归表示法[ 1] , 根据模型各构件的几何向量关系, 得到求解所需的 14 个向量方程( 略) 。 得到向量方程后, 利用矩阵消元的方法, 分 2 步消去了 6 个待求量中的 5 个量 , 得到求解模型的 16 次 多项式方程。 利用空间机构的向量分析方法, 如图 4 所示 , 把这个模型从转动副 ( R 副 ) 3 和 6 处分开 , 得到 2 个子链 , 通过计算这 2 个子链的向量的点积 ( scalar product ) , 便可得到关于求解模型的方程。所求方 程可参照利用 J . Duf fy 的递归表示法方便地进行运算。
AB
m A nB - nA m B )]
- 1
nA lB - nB lA lA m B - l B m A cos(
AB
公垂线与已知向量轴线交点到已知点的距离 S A 、S B 的求解: S A = { ( x B - x A ) [ l A - lB cos( A B ) ] + ( y B - y A ) [ m A - m B ( z B - z A ) [ nA - nB SB = { ( x B - x A ) [ l A ( z B - z A ) [ nA cos( cos( cos(
( 1. 西安理工大学机械与精密仪 器工程学院 , 陕西 西安 710048; 2. 日本山形大 学 )
摘要: 通过对具有一般约束的空间七杆 7R 机构和空间六杆 6R 六自由度机器人机构结构 的分析 , 在已有的位移分析的研究基础上, 把空间七杆 7R 机构和空间六杆 6R 六自由度机 器人机构转换为一个自由度为零的空间六杆框架模型, 这样便可以通过研究空间框架的形 状随输入角或末端执行器的变化情况, 来进行空间多杆机构位置解析和空间机器人机构位 置逆解的求解。 关键词: 一般约束; 机器人机构; 七杆 7R 机构 ; 框架模型 中图分类号: T P 241 文献标识码: A
12
已
知 , 从而向量 s2 可以求出。 同样利用以上的方法可以 求出由构件 7 和构件 2 形成的 RR 复合构件。 1. 4 向空间单环七杆 7R 机构及空间六杆六自由度 机构的逆转换
图 3 六杆机器人机构向空间刚体的转换
当模型的位置分析完成后, 下一步是恢复机构各个角位移的实际角度值。对空间机构来说 , 在向 模型转换过程中关节角 7 和关节角 2 发生了变化 , 其它角位移的值没有发生变化。 在模型中, 关节角 7 是由向量 a67 和向量 a72确定的 , 而对于空间单环七杆 7R 机构来说, 它的关节角是由向量 a6 7和向量 a71 确定的, 其中向量 a71 是机构的连杆参数 , 它的值是给定的, 当输入角 1 给定后 , 向量 a72 也就确定 了。因此 , 在求出模型的关节角 7 后 , 要想得到七杆机构的关节角 7, 必须确定向量 a67的值。由于向 量 s7 也已知 , 所以向量 a67 很容易由向量 a72求得。 利用同样的方法, 空间单环七杆 7R 机构的关节角 2 亦可以确定, 它的求解关键是求出向量 a23 的值。 对于空间六杆六自由度机械手来说, 求出关节角 2 的方法与上面从模型的关节角 2 得到空间单 环七杆 7R 机构的关节角 2 的方法相同。 因为根据关节角的定义 , 关节角 7 是由向量 a67和向量 a71来 确定, 为了从模型的关节角 7 得到机械手关节角 7 的值, 在机器人机构中构造一个向量 a71 , 如图 3 的虚线所示 , 它由末端执行器的方位向量 s1 和构件 7 的轴线向量 s7 来确定。 当得到向量 a71 后, 下一步 求解机械手关节角 7 的方法与上面的相同。 在恢复运算过程中, 还有一个问题应该注意。例如利用向量 a67和向量 a71 求解机构的关节角 7 时 , 关节角值的正负的确定很重要, 因此必须求出关节角的正、 余弦以后 , 关节角才可以确定。我们利 用的两个单位向量 a67 和向量 a71的点积、 叉积 , 就可以得到关节角的正、 余弦值。
nB } , 求解复合构件参数 S A 、 SB 、 aA B 、A B 、 aA B , 如图 1 所示。 角度 cos(
AB
T
的求解: ) = sA sin( sB = lA
AB
AB
lB + mA
2 AB
m B + nA )]
1/ 2
nB
图 1 复 合构件参数的求解
公垂线单位矢量 aA B 的求解 : ) = [ 1 - cos ( lA B aA B = m A B = [ sin( nA B
AB AB AB
)] +
) ]}
sin ( sin (
- 2
- 2 - l B] + ( y B - y A ) [ mA
AB
) - mB] +
) - nB ] }
)
公垂线段长度的求解: aA B = [ ( x B - x A ) l A B + ( y B - y A ) m A B + ( z B - z A ) nA B ] 1. 2 空间单环七杆 7R 机构向统一模型的转换 图 2 所示的是一个空间单环七杆 7R 机构的结构简图。设构件 7 为机架, 对于这个机构来说 , 构 件 1 为输入构件, 而构件 2 为输出构件。为了把这个机构转变为一个空间框架模型, 利用上面的 RR 复合构件的生成原理 , 求解由构件 7 和构件 2 形成 的复合构件。这里由于构件 7 为机架 , 可以很容易 地给出向量 s7 和向量 a71的值。 对于这个空间多杆机 构 来说, 它的连杆的扭转角
的复合构件, 图 2 的虚线部分表示形成复合构件后 的机构局部形状, 它形成了一个新的构件。
图 2 中新构件 2 的连杆长度为 a72 , 连杆偏置为 S 2 , 新构件 7 的连杆长度 a67与改变前相同, 只有连 杆偏置 S 7 发生了改变。 在连杆尺寸改变的同时 , 连杆的扭转角和关节角也发生了改变 , 其中形成了新 的扭转角
( 1. X i’ an U niv er sit y of T echnolog y, Xi’ an 710048, China; 2. Yamag ada U niv er sit y Japan)
Abstract: Based on the ex ist ing research of displacement analysis of m echanism s and by analy zing the st ruct ures of the g eneral spatial 7-link 7R mechanism and the spat ial 6-link 6R 6DOF manipulat or , the g eneral spatial 7-link 7R mechanism and t he spat ial 6-link 6R 6-DOF manipulat or are transf ormed int o a spat ial 6-link 0-DOF f ram e. In t his w ay , t he displacement analysis of spat ial multi-link mechanism s and t he inverse solut ions of spat ial manipulat ors by invest ig at ing t he frame shape changing with t he input angle or the end ef fectors can be conducted. Key words: general constraint ; m anipulators; 7-link 7R mechanism ; f rame m odel 在空间闭链机构中, 具有一般约束的空间七杆 7R 机构是空间连杆机构研究中最困难的问题之 一 , 而在单开链工业机器人的研究中 , 空间六杆 6R 六自由度机器人也具有同样的典型性, 因此具 有一般约束的空间七杆 7 R 机构的位置分析和空间六杆 6R 六自由度机器人的位置逆解的研究显得 尤为重要, 如果这些问题得到很好的解决, 其它杆数少于 7 的空间单环机构和其它类型的空间工业机 器人运动学方面的问题可以利用相类似的方法得到解决。由于空间单环七杆 7R 机构和空间六杆 6R 六自由度机器人机构之间存在着本质的内在联系, 因此在分析这两种机构时 , 可以从整体上采用统一 的模型和求解方法来对它们进行分析。本文从这个思想出发 , 在分析空间单环七杆 7R 机构和空间六 杆 6R 六自由度机器人机构的基础上, 把两种机构统一到一个空间零自由度六杆 6R 框架模型上。 一个空间单环七杆 7R 机构对应于机构的一个输入, 机构存在多个空间构形与这个输入相对应 , 机构的位置分析就是分析这个机构的各个参数随机构的输入变化情况。因此, 可以把这些对应于输