第三章 Petri网的分析方法(1)
Petri网的建模与分析

Petri网的建模与分析作者:毛子剑来源:《无线互联科技》2021年第23期摘要:Petri网具有一种系统的数学建模能力,广泛地应用于具有同步、并发、冲突的离散事件系统的建模,可以用来描述较为复杂的业务过程。
随着业务过程管理的复杂程度不断增加,使得业务过程建模的难度也逐渐提高,是当前业务过程建模中需要解决的主要问题。
首先,文章介绍了Petri网的基本概念及其形式化描述,其次描述了在业务过程建模中常用的4种工作流模型的基本结构并结合Petri网构成了工作流Petri网的基本模型,以此完成对业务过程的建模。
最后,运用Petri网对索赔处理过程进行建模,并对其可达状态进行分析,进而提高业务过程管理质量。
关键词:Petri网;业务过程;工作流;过程管理;可达状态0 引言Petri网一种是离散事件系统建模的通用分析工具,在系统建模领域有着广泛的应用[1],且具有严格的形式化定义、丰富的表达能力和直观的图像化描述等特点[2]。
Petri网适用于描述异步并发系统的网状模型,既能描述系统的结构,又可以模拟系统的运行状态。
它没有任何形式的全局控制,是一个异步系统,即按照事件间的依赖关系建立业务过程模型。
随着业务过程管理水平的不断提高,业务过程的复杂化程度也不断增加,一般的业务流程建模不具备异步并发的特点,而Petri网作为一种建模工具,不仅可以较好地描述业务过程的动态性特征,而且可以模拟过程模型的运行状态。
Petri网的基本组成元素包括库所、变迁、托肯以及流关系等,在Petri网的图形化描述中,库所、变迁和托肯分别使用圆圈、矩形块和小黑点表示,使用有向弧连接库所和变迁,从而共同构成一个基本的Petri网模型。
其中,有向弧只能由库所指向变迁或者由变迁指向库所,不存在流关系由库所指向库所或者由变迁指向变迁,即变迁之间使用库所连接。
库所表示建模过程的可能状态,变迁表示建模过程的事件活动,库所中的托肯表示资源,托肯个数则表示资源个数。
Petri网结构理论研究的开题报告

Petri网结构理论研究的开题报告一、选题背景Petri网是一种形式化的图形工具,可用于描述和分析系统的行为和活动。
它采用元件和变迁组成的图形,代表一个系统中的元素和事件,通过对图形进行控制流分析,可以确定系统的可达性、死锁状态、安全性以及性能等特性。
因此,Petri网在系统建模与分析中有着广泛的应用。
Petri网的早期研究主要集中在理论分析与方法探索方面,而近年来,随着信息技术的发展和计算机系统的广泛应用,Petri网已经成为了一种重要的软件工程技术和计算机科学工具。
因此,Petri网结构理论的研究具有重要意义,可以为Petri网的应用提供更为严谨和有效的理论基础。
二、研究内容与目标本文旨在对Petri网结构理论进行研究和探索,具体包括以下内容:1. Petri网的基本概念和符号表示,包括Petri网的元件、变迁、状态等概念。
同时,对Petri网的符号表示进行讨论,包括Petri网的有向图、无向图、矩阵表示等不同符号表示的优缺点。
2. Petri网的结构特性和分析方法,包括Petri网的可达性分析、死锁状态分析、安全性分析以及性能分析等相关方法和技术。
同时,对Petri网的结构特性进行分析,包括Petri网的可重置性、限制性、极限性、同构性等特性。
3. Petri网结构理论的发展和应用进展,包括Petri网结构理论的发展历程、现状以及未来的发展方向和趋势。
同时,对Petri网在实际应用中的典型应用案例进行分析和探讨。
通过对Petri网结构理论的研究和分析,本文旨在探索Petri网在实际应用中的优势和潜力,并为Petri网的应用提供更为有效和严谨的理论基础。
三、研究方法和措施本文采用文献资料分析法、实例分析法、数学建模分析法等方法,对Petri网结构理论的相关概念、方法、工具和应用案例进行深入研究和分析,并对其进行综合评价和展望。
四、论文结构本文主要包括以下章节:第一章绪论:介绍Petri网结构理论的研究背景、选题意义和研究目标等。
基于Petri网的分析方法简述

基于Petri网的分析方法简述摘要:对数学和图形进行描述和分析的工具很多,但能用良好的数学性质把一些复杂的现象(例如,同步、并发、分布、冲突、资源共享等)描述的直观、生动形象的工具很少,而Petri网就具有这些优点。
在分布式系统、信息系统、离散事件系统等领域,都可以利用Petri网对离散事件动态系统建模、规范分析和设计,而且非常好。
Petri网有很多分析方法,文章就作简要概述。
关键词:Petri网;Petri网语言;可达性;不变量;死锁Petri网是一种计算模型,也是一种数学模型,最先是由德国的C.A.Petri教授提出来的,之后,得到了深入的研究,对于异步并发系统的描述和模拟,能用非常友好的图形表示出来。
友好的图形表示只是Petri网得到广泛应用的一个原因,更主要的原因是它的分析方法非常完备,而且这些方法对于分析和模拟系统的行为非常有效。
下面就简述一下其丰富的分析方法。
1Petri网语言Petri网语言,是用来解决一个网系统中由于变迁而引发的序列问题。
这种通过变迁引发的序列,可以控制事件发生的顺序,从而对资源进行合理的配置和有效地调度。
最初Petri网语言的目的是利用这种变迁引发的序列来分析系统的行为,并通过其语言来进行计算和模拟,对于系统的设计能有效地进行控制和改进。
随着Petri网语言的发展,它在理论和应用方面都得到很好的应用,成为了Petri网的重要组成部分。
2可达树Petri网是否可达如何判定,可以在一个网系统中设置一个标识,根据这个标识是否能够从初始标识可达来判定Petri网的可达性。
Petri网的很多问题都是通过可达性问题来进行分析的。
判定Petri网的可达性很难,但其可达性问题是可以判定的。
如何去判定?有很多方法,基其中之一是基于可达树或可覆盖树。
如果Petri网有界,那么可达树的节点就有限,其网系统的可达性就能够分析的非常准确。
如果Petri网无界,可达树的节点就无限,所以这样的可达树就没办法构造出来。
[分享]Petri网论文:基于Petri网的几个并发问题的建模与分析
![[分享]Petri网论文:基于Petri网的几个并发问题的建模与分析](https://img.taocdn.com/s3/m/17f1111903020740be1e650e52ea551810a6c9ba.png)
Petri网论文:基于Petri网的几个并发问题的建模与分析【中文摘要】Petri网不仅可以采用可视化图形描述而且可被形式化的数学方法所支持,是一种形式化、图形化的分布式系统建模和分析工具。
它不但能够精确地分析系统的静态特性,而且能够很好地分析系统的动态行为性质,从而很好地刻画系统的动态行为、分析系统的性能。
它既可采用形式化直观的图形表示,又可以引入许多数学方法对其性质进行分析与验证。
目前,大多数的软件系统都是并发系统,并发是衡量系统运行效率高低的一个参数标准。
为了达到“事半功倍”的效果,现在的系统环境越来越需要并发,只有这样才能更好地利用系统资源环境,才能使一个系统具有更强的竞争力。
Petri网作为一个优秀的形式化描述和分析工具,能很好地描述和分析这类系统。
采用软件形式化技术,不仅有利于开发人员之间的沟通,提高软件的可靠性,而且可以尽可能地缩短开发的总体时间,减少软件设计早期阶段的错误。
本文的主要工作如下:(1)在Petri网下对哲学家就餐问题模型进行了分析。
哲学家就餐问题是描述在共享资源下同步与并发的经典案例,活性与无饥饿性是求解此问题的前提,效率是基本要求。
由于对资源的竞争使几个哲学家不可能同时处于就餐状态,在考虑公平性的情况下定义了延迟Petri网...【英文摘要】Petri nets can not only use visual graphic description, but also can be supported by formal mathematical methods, it is a kind of formalized, graphical distributedsystem modeling and analysis tools. It can analyze system static characteristics accurately and analyze system dynamic behavior well, thereby good depicting system dynamic behavior and analyzing system performance. It may adopt formalized visual graphics and introduce many mathematical methods to analyze and verify its properties.At present, ...【关键词】Petri网异步并发形式化方法 S-不变量建模系统分析【英文关键词】Petri net Asynchronous concurrent Formal methods S-invariant Modeling System analysis。
Petri网详细介绍与学习

模型改进
针对传统Petri网的不足,研究者们不断尝试对其进行改 进和优化,以提高其适用性和性能。例如,通过引入新 的元素或规则,改进Petri网的表达能力;优化Petri网的 推理算法,提高其推理速度等。
有界性、安全性与死锁
01
03
有界性
Petri网中的每个库所至多 包含有限个标记,且每个 变迁最多可以消耗和产生 有限个标记。
安全性
Petri网中不存在死锁状态 ,即对于任意一个状态, 总存在一个后继状态。
死锁
当Petri网中存在一个状态 ,从该状态无法通过任何 变迁到达其他状态时,称 该状态为死锁状态。
Petri网与其他建模方法的融合
融合方法
为了更好地描述和分析复杂系统,研究者们尝试将 Petri网与其他建模方法进行融合。例如,将Petri网与 流程图、状态图等图形化建模方法相结合,可以更直 观地描述系统的结构和行为。
融合优势
通过融合不同的建模方法,可以取长补短,提高对复 杂系统的描述和分析能力。同时,这种融合也有助于 推动不同领域之间的交叉和融合,促进多学科研究的 开展。
实例分析学习
案例分析
分析不同类型Petri网的特点和适用场景,如同步Petri 网、时间Petri网和有色Petri网等。
通过学习经典的Petri网实例,深入理解Petri网的实际 应用和建模技巧。
对比不同Petri网实例的建模效果,提高对Petri网的实 际操作能力和应用水平。
实践应用学习
第三章 Petri网的分析方法(1)

(0,0, ,1)
t3 (1,0, ,0)
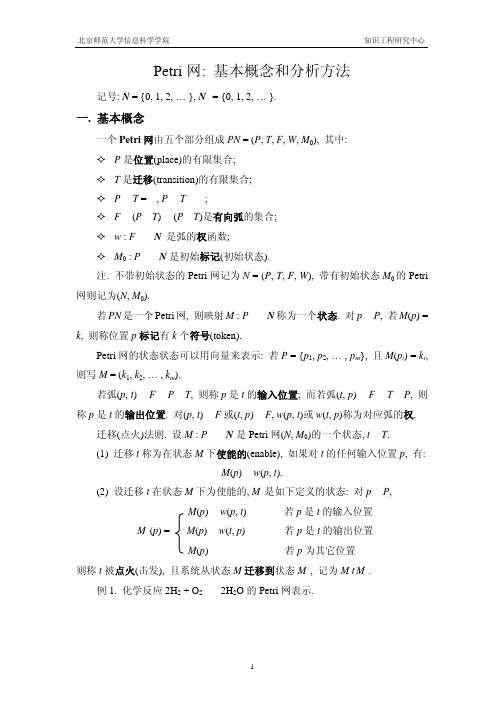
一、可达标识图与可覆盖性树
s1 s1
由于无界量的引入,引 起了Petri网运行过程中 的某些信息丢失。具体的
(0,1,0,1) t2
t2
t1 s3 t3 s4
(a)
t2
t1
2
s2
s2 t3 s4
(b)
s3
(1,0,0,1) t1 (0,1, ,1) t3 t2
第三章 Petri网的分析方法
提纲
一、可达标识图与可覆盖性树 二、关联矩阵与状态方程 三、Petri网语言 四、Petri网进程
一、可达标识图与可覆盖性树
对于有界Petri网,其可达标识集R(M0)是一个有限集合,因此可以以R(M0)作为顶点集,以标识之 间的直接可达关系为弧集构成一个有向图,称为Petri网的可达标识图(reachable marking graph)。 定义3.1. 设PN=(P,T;F, M0)为一个有界Petri网。PN的可达标识图定义为一个三元组 RG(PN)=(R(M0),E, L),其中 E={(Mi,Mj)| Mi, Mj R(M0),tk T: Mi [ tk> Mj } L:E→T,L(Mi,Mj)= tk 当且仅当Mi [ tk> Mj 称R(M0)为顶点集,E为弧(边)集, 若L(Mi,Mj) = tk,则称tk为弧(Mi,Mj)的旁标。
M0 : (1,0,0,0) t2
(0,1,1,0) t1 (1,0, ,0) t2 (0,1, ,0) t1 (1,0, ,0) t4 t4 (0,0,0,1)
t1
t3
定义3.2. 设CT(PN)为Petri网的可覆 盖性树。若将CT(PN)中标识向量相 同的结点合并在一起,便得到PN的 可覆盖性图,记为CG(PN)。
Petri网基本概念和分析方法
(b) t1, t2 是并发的, 且若 t2 在 t1 前点火,
则 t1 与 t3 冲突.
图 1.5. 对称与非对称
Petri 网的可达图是其可能状态和使能迁移关系的图表示.
(a) 一个 Petri 网
(b) 上述网的可达图 图 1.6. 可达图
3
北京师范大学信息科学学院
知识工程研究中心
二. Petri 网的行为
M(p) § M £(p). 对一个迁移 t, 用 Mt 记可以使能的最小状态. 定理. Petri 网(N, M0)中的迁移 t 是 L1-活性的 ‹ Mt 是可覆盖的.
5
北京师范大学信息科学学院
知识工程研究中心
2.6 持续性 Petri 网(N, M)称为持续的, 如果(N, M)中任何两个使能迁移 t1, t2, t1 的点火不 会改变 t2 的使能性. 例如, 所有标记图都是持续的, 但持续的网不一定都是标记图.
北京师范大学信息科学学院
知识工程研究中心
Petri 网: 基本概念和分析方法
记号: N = {0, 1, 2, … }, N+ = {0, 1, 2, … }.
一. 基本概念
一个 Petri 网由五个部分组成 PN = (P, T, F, W, M0), 其中: P 是位置(place)的有限集合; T 是迁移(transition)的有限集合; P … T = «, P » T ∫ «; F Œ (P ä T) » (P ä T)是有向弧的集合; w : F ö N+是弧的权函数; M0 : P ö N 是初始标记(初始状态). 注. 不带初始状态的 Petri 网记为 N = (P, T, F, W), 带有初始状态 M0 的 Petri 网则记为(N, M0). 若 PN 是一个 Petri 网, 则映射 M : P ö N 称为一个状态. 对 p œ P, 若 M(p) = k, 则称位置 p 标记有 k 个符号(token).
自动制造系统的Petri网结构分析和控制器设计

自动制造系统的Petri网结构分析和控制器设计自动制造系统的Petri网结构分析和控制器设计摘要:自动制造系统是现代工业中一种高度智能化和自动化的生产方式。
Petri网作为一种形式化描述和分析系统行为的工具,被广泛应用于自动制造系统中的建模和控制。
本文介绍了自动制造系统中的Petri网结构分析方法和控制器设计技术,并通过一个实例说明了其在实际应用中的有效性。
关键词:自动制造系统;Petri网;结构分析;控制器设计1.引言自动制造系统是现代工业中应用广泛的一种高度智能化和自动化的生产方式。
其核心目标是提高生产效率、降低成本,并保障产品质量。
为了实现这一目标,自动制造系统通常需要一个有效的控制系统来监测和调度各个生产环节,以实现流程的自动化控制。
Petri网作为一种形式化描述和分析系统行为的工具,被广泛应用于自动制造系统中的建模和控制。
2.Petri网的基本概念Petri网是Petri于1962年提出的一种描述系统并发行为的图形工具。
它由一组标记、过渡和弧线组成。
标记表示系统在某一时刻的状态,过渡表示系统的活动,弧线则表示标记和过渡之间的关联关系。
Petri网描述了系统状态在不同活动之间的转换关系,并且能够对系统的行为进行形式化的分析。
3.Petri网在自动制造系统中的应用在自动制造系统中,Petri网广泛应用于系统的建模和控制。
通过将自动制造系统抽象为Petri网,可以清晰地描述系统的各个组成部分以及它们之间的关系。
特别是在多任务的情况下,Petri网能够有效地处理不同任务之间的并发和冲突关系,提高系统的并行处理能力。
同时,Petri网的结构分析方法也可以帮助我们深入理解自动制造系统的行为,发现系统中的潜在问题,并进行系统性能的评估和优化。
4.Petri网结构分析方法Petri网的结构分析方法主要包括有向图分析、路径分析和状态空间分析。
有向图分析是最简单直观的分析方法,可以帮助我们了解Petri网的结构特征和系统行为。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
提纲
一、可达标识图与可覆盖性树 二、关联矩阵与状态方程 三、Petri网语言 四、Petri网进程
一、可达标识图与可覆盖性树
对于有界Petri网,其可达标识集R(M0)是一个有限集合,因此可以以R(M0)作为顶点集,以标识之 间的直接可达关系为弧集构成一个有向图,称为Petri网的可达标识图(reachable marking graph)。 定义3.1. 设PN=(P,T;F, M0)为一个有界Petri网。PN的可达标识图定义为一个三元组 RG(PN)=(R(M0),E, L),其中 E={(Mi,Mj)| Mi, Mj R(M0),tk T: Mi [ tk> Mj } L:E→T,L(Mi,Mj)= tk 当且仅当Mi [ tk> Mj 称R(M0)为顶点集,E为弧(边)集, 若L(Mi,Mj) = tk,则称tk为弧(Mi,Mj)的旁标。
通过引入 ,就可以用有限树来反映无界Petri网的运行情况,称该有限树为 Petri网PN的可覆盖性树(coverability tree),记为CT(PN)。
一、可达标识图与可覆盖性树
算法3.1. Petri网可覆盖性树的构造算法 输入: PN=(P,T;F, M0) 输出:CT(PN) 算法步骤: Step0:以M0作为CT(PN)的根结点,并标之以“新”; Step1:While 存在标注为“新”的结点 Do 任选一个标注为“新”的结点,设为M; Step2: Step3: If 从M0 到M的有向路上有一个结点的标识等于M Then 把M的标注改为“旧”,返回Step1; If tT:M[t> Then 把M的标注改为“端点”,返回Step1
(0,0, ,1)
(1,0, ,1) t1 (0,1, ,1)
(c)
说,的引入主要导致两
类重要信息缺失或者反映 的不全面:
图1:有相同可覆盖性树但标识变化规律不同的Petri网
t1
t3 p2 p3
M0 : (0,1,0)
t1 t2 M1 : (1,0,0) t3 t4
p1
t2
t4
M2: (0,0,1)
一、可达标识图与可覆盖性树
通过可达标识图RG(PN)可以分析有界Petri网PN的各种性质。 定理3.1. 对任意Mi,Mj R(M0),Mj是从 Mi可达的当且仅当在RG(PN) 中,从Mi到Mj存在一条有向路。
M0 : (1,0,0,0) t2
(0,1,1,0) t1 (1,0, ,0) t2 (0,1, ,0) t1 (1,0, ,0) t4 t4 (0,0,0,1)
t1
t3
定义3.2. 设CT(PN)为Petri网的可覆 盖性树。若将CT(PN)中标识向量相 同的结点合并在一起,便得到PN的 可覆盖性图,记为CG(PN)。
一、可达标识图与可覆盖性树
p1
M0 : (1,0,0,0) 新 t2
t3 (0,1,1,0) 新 t4 t1 p4 (1,0, ,0) 新 1,0) t2 (0,1, ,0) 新 t4 t1 (1,0, ,0) 新 旧 (0,0,0,1) 新 端点
t1 p2
t2
p3
t4
(0,0, ,1) 新
一、可达标识图与可覆盖性树
定理3.3. 有界Petri网PN是活的当且仅当在RG(PN)中,从顶点M0出 发的每条有向路都走入一个强连通子图,而且在每个这样的强连通子 图中,每个t T至少是一条有向弧的旁标。
定理3.4. 有界Petri网PN的两个变迁t1和t2处于公平关系的充分必要条
件是在RG(PN)的每条有向回路C中, t1是其中的一条弧的旁标当且 仅当t2也是其中一条弧的旁标。
推论3.1. 在RG(PN)中,从M0到每个结点都有一条有向路。
推论3.2. M R(M0)是PN的一个死标识当且仅当在RG(PN)中,M是一 个终端标识。
定理3.2. 设pj P,在Petri网PN中pj的界 B(pj )等于RG(PN)中各个顶 点向量的第j个分量的最大值。
推论3.3. PN是安全的当且仅当RG(PN)中每个顶点的向量都是0-1向 量。
定理3.5. PN是公平Petri网的充分必要条件是在RG(PN)的每条有向回
路C中,每个 t T 都至是C中一条弧的旁标。
?
定理3.4和3.5在无界Petri网中 还成立吗?
一、可达标识图与可覆盖性树
若PN不是有界网,则R(M0)是一个无限集合,无法画出PN的可达标识图。 为了用有限形式表达一个有无限个状态的系统的运行情况,引入一个表示无 界量的符号。 具有下述性质: (1)对任意正整数n: > n, n= (2) 当库所pj中的标识数在Petri网的运行过程中趋向于无限增长时,就把标识向 量中的第j个分量改为 ,以此覆盖所有这类标识。
(0,0, ,1)
t3 (1,0, ,0)
一、可达标识图与可覆盖性树
s1 s1
由于无界量的引入,引 起了Petri网运行过程中 的某些信息丢失。具体的
(0,1,0,1) t2
t2
t1 s3 t3 s4
(a)
t2
t1
2
s2
s2 t3 s4
(b)
s3
(1,0,0,1) t1 (0,1, ,1) t3 t2
t3
新 (1,0, ,0) 旧
一、可达标识图与可覆盖性树
定理3.1. PN是有界Petri网当且仅当 (按算法3.1构造的)CT(PN)中,每 个结点的标识向量都不含有分量。 对有界Petri网PN,按照算法3.1构 造出来的树结构称为PN的可达性树 (reachability tree),记为 RT(PN)。
Step4:
4.1: 4.2: 4.3: Step5:
For 每个满足M[t> 的tT Do
计算M[t>M’中的M’; If 从M0 到M的有向路上存在M’’使M’’<M’ Then 找出使M’’(pj)< M’(pj)的分量j,把M’的第j个分量改为; 在CT(PN)中引入一个“新”结点M’,从M到M’画一条有向弧,并把此弧旁标以t; 擦去结点M的“新”标注,返回Step1。