机械毕业设计-螺旋弹簧疲劳试验机设计
机械毕业设计(论文)-螺旋压力机设计

本科毕业设计论文题目螺旋压力机设计毕业任务书一、题目:螺旋压力机设计二、指导思想和目的要求:毕业设计是学生在校期间进行最后一次理论结合实际的较全面和基本的训练,是对几年来所学知识的系统运用和检验,也是走向工作岗位之前的最后一次的过渡性练兵。
通过这次毕业设计要求达到以下基本目的:1)巩固、加强、扩大和提高以往所学的有关基础理论和专业知识。
2)培养学生综合运用所学的知识以解决实际工程问题的独立工作能力,并初步掌握机械装备或部件设计的思想、设计程序、设计原则、步骤和方法。
3)培养学生使用有关设计规范、手册、参考文献以及分析计算、绘图和编写设计说明书等项能力的基本技能训练。
对本次毕业设计的基本要求是:1)设计者应在规定时间内圆满完成要求的设计内容。
设计成果包括:设计说明书一份(按规范格式,不少于1.5万字),设计图纸一套(文本版+电子版,不少于2张A0,鼓励用三维软件建模和装配并生成二维图纸);另外还应翻译与课题有关的外文资料,译文字数不少于5000字。
2)设计者必须充分重视和熟悉原始资料,明确设计任务,在学习和参考他人经验的基础上,发挥独立思考能力,创造性地完成设计任务;合理利用标准零件和标准部件,非标准件应满足工艺性好、操作方便、使用安全等要求,降低成本提高效益;绘制图纸应符合国家标准,各项技术要求和尺寸标注应符合规范,说明书论述要充分,层次清楚,文字简洁,计算步骤正确。
三、主要技术指标设计一个龙门式小型螺旋压力机,主要用于机修车间压力校正、压力装拆等。
主要技术要求如下:1)最大输出压力为30kg。
2)压力机压头行程为350mm,运动速度为0.3m/min。
3)压力机内可放置物体高度为400mm,直径400mm。
4)压力机工作间歇工作100000h。
四、进度和要求:1. 熟悉题目背景、查阅相关资料、复习有关知识;查找与课题相关的英文资料并翻译成中文;完成开题报告。
寒假2.总体方案设计:拟定总体布局,选择原动机类型,设计传动方案;尽可能绘制总体方案示图;第1-2 周3.确定主要技术参数:进行运动和动力参数计算,确定原动机型号;第 3-4 周4.绘制总体装配草图,并对重要零件(如轴、轴承等)进行工作能力校核;第5-6 周5.绘制传动部件装配图(鼓励用三维软件);第7-8 周6.绘制非标准件零件图(鼓励用三维软件);第9-11周7.撰写说明书初稿;第12-13周8.修改说明书,准备答辩。
螺旋弹簧疲劳试验机设计

--弹簧疲劳强度的设计安全系数,当弹簧的设计计算和材料的力学性能数据精确性高时,取 ;
--弹簧材料的脉动循环剪切疲劳极限,按变载荷作用次数N,由下表查取;
表3-1弹簧参数表
变载荷作用次数N
取
故设计合理。
1)选材:
1Cr18Ni9
2)旋绕比 :取 ,则
3)弹簧中径 :
4)弹簧丝直径 : 取
5)对于压缩弹簧工作圈数根据公式 计算,其中
图1-1方案一示意图
2方案二
电动机产生动力后输出到减速器,然后进入涡轮蜗杆传动系统,进一步减速并改变运动旋转方向后,通过链传动系统传递到丝杠。由链轮的转动带动丝杠转动。与此同时与丝杠配合的丝杠螺母则带动横梁上下运动,而下夹具则是固定在试验台上,至此完成试验。如图1-2所示:
图-2方案二示意图
3方案三
弹簧试验机的动力由电磁调速电机输出,将载荷传递到试验机的主动轴上,主动轴上装有曲柄滑块机构,由于曲柄相对很短,在机械设计中一般将其设计成偏心轮机构,偏心轮与驱动杆之间通过连杆铰接在一起。当主动轴带动偏心轮机构转动时,连杆把偏心轮的旋转运动变成为驱动杆的往复直线运动,从而带动其顶端的弹簧压盘做往复运动,压缩其间的弹簧,使弹簧受到往复的压力,从而模拟其在工作状态下的受力,如图2-2所示,本实验的机械构建主要由大带轮、主轴、偏心连杆机构、机架、弹簧压盘座等组成,对应着不同的试验弹簧直径,有相对应的一组弹簧压盘与其对应,更换压盘,即可进行不同直径的弹簧的检测。
按公式 演算
即 故弹簧设计合理。
大弹簧的有关参数如下表:
表3-2弹簧参数表
参数名称及代号
计算公式
结果
中径
30mm
内径
25mm
外径
SP122疲劳负荷作用之螺旋弹簧(几何的设计.
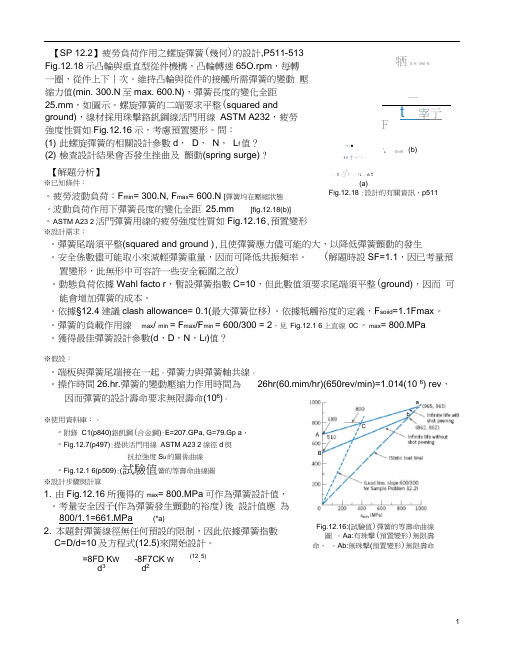
【解題分析】※已知條件:。
疲勞波動負荷:F min = 300.N, F max = 600.N [彈簧均在壓縮狀態 。
波動負荷作用下彈簧長度的變化全距 25.mm [fig.12.18(b)]。
ASTM A23 2活門彈簧用線的疲勞強度性質如Fig.12.16,預置變形※設計需求:。
彈簧尾端須平整(squared and ground ),且使彈簧應力儘可能的大,以降低彈簧顫動的發生。
安全係數儘可能取小來減輕彈簧重量,因而可降低共振頻率。
(解題時設SF=1.1,因已考量預 置變形,此無形中可容許一些安全範圍之故)。
動態負荷依據Wahl facto r ,暫設彈簧指數C=10,但此數值須要求尾端須平整(ground),因而 可能會增加彈簧的成本。
依據§12.4建議clash allowance= 0.1(最大彈簧位移)。
依據牴觸裕度的定義,F soiid =1.1Fmax 。
。
彈簧的負載作用線 max / min = F max /F min = 600/300 = 2,見 Fig.12.1 6上直線 0C 。
max = 800.MPa 。
獲得最佳彈簧設計參數(d ,D ,N ,L f )值?※假設:。
端板與彈簧尾端接在一起。
彈簧力與彈簧軸共線。
操作時間26.hr.彈簧的變動壓縮力作用時間為 26hr(60.mim/hr)(650rev/min)=1.014(10 6) rev ,因而彈簧的設計壽命要求無限壽命(106)。
※使用資料庫:。
附錄 C1(p840)鉻飢鋼(合金鋼):E=207.GPa, G=79.Gp a , 。
Fig.12.7(p497):提供活門用線 ASTM A23 2線徑d 與抗拉強度S U 的關係曲線。
Fig.12.1 6(p509):(試驗值簧的等壽命曲線圖※設計步驟與計算1. 由Fig.12.16所獲得的max = 800.MPa 可作為彈簧設計值, 。
电子拉力弹簧试验机的设计毕业设计

毕业设计题目电子拉力弹簧试验机的设计摘要电子拉力弹簧试验机,主要用于测试弹簧或者其他弹性器件的受力与变形之间的量值关系,确定试件的品质,进而对试件的加工工艺、工序是否合理做出正确的判断,为合理修正、提高工序能力提供科学依据。
本产品主要应用于弹簧制造、低压电器、家用电器、轻工纺织、军工机械、科研、院校等部门。
本电子拉力弹簧试验机采用伺服电机作为动力源,为了增大传动比,采用蜗轮蜗杆减速机减速,滚珠丝杠系统制造精密,稳定可靠,用单片机实现对电机转速的控制,可随时控制压盘上下移动的距离,能够实现手动加载,具有超行程保护功能。
整机框架采用封闭式结构,结构紧密,造型美观,安全可靠、操作方便。
本次毕业设计在充分了解试验机知识的基础上,整合了电子拉力弹簧试验机的优点,对普遍存在的问题进行了改善,做了进一步提高。
关键词:试验机;弹簧;单片机;伺服电机;ABSTRACTElectronic tensile spring testing machine,Mainly used to test the springs or other elastic devices between force and deformation value relationship,的determine the quality of the specimen,And then process the specimen, whether it is reasonable procedures to make the right judgments, reasonable amendments to improve the process capability to provide scientific evidence.This product is mainly used in spring manufacture, low-voltage electrical appliances, household appliances, light textile, military machinery, scientific research institutions and other departments.The electronic tensile test machine using servo motor as a power source,To increase the transmission ratio,Worm gear reducer used,Manufacture of precision ball screw systems,Stable and reliable,With MCU control of motor speed,,Control the pressure plate can move up or down at any distance,,Can be achieved manually loaded,With over-travel protection。
机械毕业设计1634圆柱螺旋弹簧测力分选机结构设计论文

本科生毕业论文毕业论文题目圆柱螺旋弹簧测力分选机结构设计学生姓名专业机械设计制造及其自动化班级指导教师完成日期2014年5月29号目录摘要 (I)Abstract (II)第1章绪论 (4)1.1 课题研究目的及意义 (4)1.2分选机分选方式研究 (6)1.3课题国内外现状 (6)1.3.1国外分选机研究现状 (6)1.3.2国内分选机研究现状 (7)1.4存在问题 (7)第2章方案的选择与设计 (9)2.1本课题的设计任务 (9)2.2圆柱螺旋弹簧分选机的设计思路 (9)2.3送料机构 (10)2.4加力与检测机构 (11)2.5落料分选机构 (12)第3章总体的机构设计 (14)第4章弹簧分选机零件结构设计 (16)4.1齿轮的选择设计 (16)4.2夹持轴承与轴的连接的夹具的选择 (17)4.2.1上夹具的设计 (17)4.2.2下夹具的设计 (19)4.3气缸的设计选择 (20)4.4传动轴的选择设计 (22)4.5轴承的选择设计 (24)4.5.1原动部分装配所选用的轴承 (24)4.5.2 执行部分装配所选用的轴承 (26)4.6其他主要零部件的设计 (28)4.6.1键的选择设计 (28)4.6.2轴套的选择设计 (28)4.6.3电动机的选择设计 (29)4.6.4分料盘的设计 (31)4.6.5底座的设计 (32)第5章校核计算 (34)5.1底座上板的受力分析与弯曲应力计算 (34)5.2 轴受力分析与应力计算 (36)总结 (39)致谢 (41)参考文献 (42)附录 (43)摘要弹簧的应用十分广泛可以说是各种机械、电器、化工等产品的关键零件。
凡是承受变载荷的弹簧,在企业内部质量控制、用户交验、新产品定型鉴定、认证,行业抽检和工艺调整环节中,必须进行性能检测。
所以弹簧检测是其生产过程必不可少的工序,测力是检测的主要内容之一。
弹簧测力分选机是在基于工业进程高速发展的今天,结合圆柱螺旋弹簧的需求量和生产企业需求的前提下所应运而生的。
机械式弹簧疲劳试验机设备工艺原理
机械式弹簧疲劳试验机设备工艺原理概述机械式弹簧疲劳试验机是一种用于测试弹簧金属材料在复杂应力状态下疲劳寿命的装置。
此设备主要用于对弹簧的疲劳性能进行测试,从而评估材料的性能和寿命。
本文将介绍机械式弹簧疲劳试验机的设备工艺原理。
设备组成机械式弹簧疲劳试验机主要由下面几个部分组成:•主机:包括底座、立柱、上下限位器、轴承、推杆和电机;•动力部:包括电机、减速机和计数器;•夹具:用于夹紧或固定被测试的弹簧;•控制系统:采用微型计算机、程序控制器和实验控制系统。
工艺原理在弹簧的实验过程中,设备对弹簧施加一个周期性或交错应力,通常使用扭曲工作原理。
弹簧的主要作用是在弹力之下,扩展到一定长度并重新获得负荷。
直到负载不再改变,弹簧才停止变形。
更具体地说,弹簧放置在夹具上,并在应变加荷下旋转,产生扭转荷载。
这些荷载会慢慢增加,直到弹簧达到其极限。
测试机械周期性应力的设备使用紧急停止机制,以便在弹簧达到其极限时立即停止测试,以避免可能的设备故障或弹簧损坏。
在测试弹簧的疲劳寿命时,设备应使用功能强大的控制系统和计数器进行测试。
控制系统可以在完成单个循环之后,将循环周期计入计数器,并可将循环动态显示在主机上的计数器上。
计数器还可以用于记录弹簧的疲劳性能,包括弹簧的工作寿命、疲劳寿命、破坏寿命和其它相关数据。
这些测试数据可以用于验证弹簧的性能及其适用性,并为进一步的临床研究和机械工程技术提供支持。
结论机械式弹簧疲劳试验机是一种重要的机械测试设备,旨在测试弹簧金属材料在复杂应力状态下的疲劳寿命。
该设备的设备工艺原理涵盖了弹簧放置在夹具上并在应变加荷下旋转产生扭转荷载的重要部分。
此外,计数器和控制系统也是机械式弹簧疲劳试验机的重要组成部分,用于记录和分析测试数据。
在未来,机械式弹簧疲劳试验机将继续促进材料科学和机械工程技术的发展。
弹簧疲劳试验方案

5.试样弹簧5.1试样试样应按规定程序批准的图样、技术文件制造,并经过尺寸和特性检验合格。
5.2试样抽取试样应从同一批产品中随机抽取5.3 试样数量5.3.1 对于疲劳寿命验证试验,推荐的最少试样数量最少4件,当有特殊要求时,试样数量可自行确定。
6 试验条件6.1 试验机6.1.1 推荐采用机械式或电液伺服试验机,也可安装在配套阀上进行试验。
6.1.2 试验机位移精度应满足试验要求。
6.1.3 试验机得频率应在一定范围内可调。
6.1.4 试验机应具备试验时间或次数预置、自动计时或计数、自动停机及输出试验数据等功能。
6.2 试验频率6.2.1 试验频率可根据试验机得频率范围和弹簧实际工作频率等情况确定。
整个试验过程中试验频率应保持稳定。
6.2.2 试验频率Fr 应避开单个弹簧的固有自振频率F ,一般应满足如下关系式: 10F F r其中:钢制弹簧固有频率F 按如下公式计算:F=3.56×105×d/nD 26.3 试验振幅振幅分为位移幅(Ha )和载荷幅(Fa )。
对于螺旋弹簧的疲劳寿命验证试验一般使用位移幅作为试验振幅。
6.4 试验环境试验一般在室温下进行,但试验时样件的温升应不高于实际工况最高温度。
7 试验方法7.1试样的安装7.1.1试样的安装方法为了避免试样承受偏载和附加应力,压缩弹簧试样安装时要保证试样两端平整接触,应将试样安放再固定的支座上;拉伸弹簧试样的安装应满足工况要求。
7.1.2 试验。
高度对定型的产品,试样试验的最大高度为实际使用要求的最大高度H1,试验的最小高度为实际使用要求的最小高度H2.试验的平均高度为实际使用工况的最大高度H1与最小高度H2二者之和的平均值。
7.1.3安装高度允许偏差用多工位试验机,或者多台试验机同时对一批试样进行试验时,应将试样调整到同样的试验安装高度,其最大允许偏差为3%Ha 。
7.2 加载7.2.1 正常情况下,按试验机的加载方式进行加载。
圆柱螺旋弹簧疲劳试验机的设计与实现

2 主要技术指标
弹簧衰减试验机的主要技术指标分别为:1)试验频率可调范围为 0.01~1 Hz。2)振幅可调范围为 0~700 mm。3)最大试验载荷为 5 000 N。4)被测弹簧最大外径为 150 mm。5)被测弹簧自由长度范围为 10~1 000 mm。6)计次范围为 1~1 000 000 次。7)位移传感器精度为 0.01 mm。8)拉压力传感器精度为 0.5%。
(2)电气系统。电气系统组成有伺服驱动器、拉压 力传感器与放大器、位移传感器、上限位开关、下限位 开关和急停按钮等。
(3)控制系统。控制系统组成有工控机、运动控制 卡、A/D 接口卡、I/O 接口卡、显示屏和键盘等。
12. 直线滑块 11. 压缩弹簧 13. 位移传感器 10. 导向圆柱
9. 下板
1. 伺服电机 2. 定位轴 3.上板 14. 丝杆螺母 4. 移动板 5. 滚珠丝杆
3 机械系统设计
机械系统主要有伺服电机、滚珠丝杆螺母、铝合金机架、导向圆柱、直线滑块、行星减速机和脚轮
等。已知试验机的相关参数如下:试验载荷为 5 000 N,最大行程为 700 mm,最快进给速度为 80 mm/s,
加减速时间为 0.1 s,滚珠丝杆的效率为 0.9。
3.1 滚珠丝杆的计算
3.1.1 丝杆轴全长 BL 丝杆轴全长可表示为
关键词:弹簧;疲劳;试验机;设计;实现
中图分类号:TH873.3
文献标志码:A
弹簧是一种弹性元件,多数机械设备均离不开弹簧。弹簧利用本身的弹性,受载后产生较大变形, 卸载后变形消失而弹簧将恢复原状。弹簧在产生变形和恢复原状时,能够将机械功或动能转变为变形 能,或把变形能转变为机械功或动能[1]。弹簧的类型很多,按结构形状来分,弹簧大致分为圆柱螺旋弹 簧、非圆柱螺旋弹簧和其他弹簧。圆柱螺旋弹簧又可分为螺旋压缩、螺旋拉伸和螺旋扭转弹簧等。一般 弹簧在工作中承受的是变载荷,疲劳破坏是弹簧失效的主要形式[2],故必须对弹簧进行疲劳性能试验。 弹簧疲劳试验机是一种对弹簧进行循环应力加载的试验设备,通过对弹簧施加周期性的变载荷来达到 检查弹簧疲劳寿命的目的。目前,弹簧疲劳试验机有机械式、电磁谐振式和电液伺服式等[3]。