五轴联动加工中心后置处理的编写与验证
AC双转台五轴联动数控加工中心的后置处理

AC双转台五轴联动数控加工中心的后置处理摘要:数控加工技术已经成为现代制造业中不可或缺的一部分,它可以高效地完成各种零部件的加工任务,并且具有高精度、高效率的特点。
AC双转台五轴联动数控加工中心可以完成更加复杂的加工任务,在加工完成后还需要进行后置处理,以保证加工零件的质量和精度。
文章以AC双转台五轴联动数控加工中心为研究对象,研究其后置处理的可行性,以期为多轴设备提供有效保障。
关键字:双转台;五轴联动;后置处理前言在数控编程过程中,前置处理指的是刀位的轨迹计算过程。
基于相对运动这一原理,一般在工件坐标系当中来计算刀位的轨迹,无需将机床结构、指令的格式考虑进去,以使前置处理通用化,保证前后置处理能够各自负责相应的任务。
为了读取最终加工程序,就需要对前置处理得到的刀位数据进行转换,形成机床程序代码,这一过程就是后置处理。
在航空领域,AC双转台五轴联动数控加工中心的后置处理起着重要保障作用,本文主要以AC双转台五轴联动数控加工中心的后置处理展开探究。
1后置处理的概述1.1 概念后置处理属于数控加工和CAM系统间的桥梁,其主要任务就是对CAM软件生成的刀位轨迹进行转化,使其成为符合特定数控系统、机床结构的加工程序。
1.2 主要任务五轴联动数控加工中心的后置处理有着重要的任务,主要是结合机床的控制指令格式、运动结构等要求,对于前置处理所生成的刀位数据文件进行转变,使其成为机床各轴的运动数据,然后,依据控制指令的具体格式,将其进行转换,形成数控加工中心的加工程序。
具体而言,可以将后置处理的任务分为几下几点:①机床运动学转换五轴联动数控编程所生成的刀位数据,通常指的是刀具与工件坐标系相对的刀心具体位置、刀轴矢量数据。
在机床的运动转变下,其主要是依据实际运动结构,对刀位文件当中的数据信息进行转换,使其成为不同运动轴上的数据信息。
②非线性运动误差的校验非线性运动误差的校验是在CAM系统计算刀位数据时进行的,这个系统使用离散直线来近似工件轮廓。
摆头转台加工中心五轴联动加工的后置处理与仿真验证

加工编程特点进行分析的基础上, 出其五轴联动加工的后置处理算法。 提 在该算法基础上 , 利用 Vsa i l u
C +60开发 出单 独 的后 置处理程序 , + . 将加 工刀轨 的刀位 文件 处理 生成 东芝格 式的 G代码 文件 。 了验 为 证后 置 处理程序 的正确 性 , 用数 控仿 真软 件 V r u . 立机床 的仿真模 型 , 利 ei t 0建 c 7 对后 置 处理 程序 生成 的 G代码 文件进行 仿真 。最后 实际加 工 了一个测试 样件 , 明 了后 置处理程序 的正确性 。 证 关键词 : 置处理 ; 后 加工 中心 ; 五轴联 动 ; 仿真 【 src】 ae nteaa s t cua caatrtso O HIA B U 1 ahnn etr Abtat B sdo nl io r tr hrc ii h y sfs u l e sc fT S B T 一4m ciigcne o al rt i  ̄ln p ,ot lytmo T S B O S9 n 一x ii rga mi ,p s ft e oan tt gt ecnr s O HIAT S99ad5ai mln orm n a ot b - t g ii y os e f s lgp g —
吴海兵 陈小 岗 - 许 兆关
( 淮 阴工学 院 数字化 制造技术 重点建设 实验室 , 安 2 3 0 ) ’ 淮 2 0 3
(淮 阴工学 院 机械工 程学院 , 安 23 0 ) 淮 20 3
Po t r c s o n i lt n o - xs ma h nn e t f a l-r t t gtt g t p s p o e s r d s mua i f a i c ii g c n er b e o a i /ii y e a o 5 ot n ln
VERICUT五轴虚拟机床模型的开发及后处理验证

N ,无需 在 机 床 上 直 接 操 作 ,快 速 、安 全 、可 靠 , C
效 益更 明显 ,五 轴 加 工 中心按 照其 结 构 特 点 的 不 同 可分 为四 大类 :双摆 头 机 床 、摆 头及 转 台机 床 、垂
: 5 ) b 6
; j
r 加 参 。 冷 , ’ 堋 磊
C D/ A C P直甩 A C M/ AP
1 p l ain o AD/ AM ̄ AP p i t f C c o C C P
(一10 一 0 , 一10 ,视 图 方 向 H —IO进 行 观 7 , 30 5) S
中心 ,这些 机构 的相互关 系相 当重要 ,不 能出错 。 3 。构 建 虚 拟 机床 模 型
图1 五轴机床外观图
技 术 参 数 表
具 体 的 技 术 参 数
如 附表 。
根据上 述 的五 轴 机 床结 构关 系 就 可 以 构 建 机 床 模型 了 ,具 体步骤 如下 : ( ) 起始 操 作 选 取 菜 单 中 Mo e- o p n n 1 dl  ̄C m o e t
别 、更 正 引起 的碰撞 。
代 了传统 的切 削 实 验 部 件 方 式 ,优 化 数 控 程 序 的 切 削速 度 ,获得 更高 效率 。
一
般的 N C仿 真 软件 只 能 模 拟 2 、3轴 的数 控 车
床或 加工 中心 ,数 控 系 统 、设 备 型 号 非 常有 限 ,有 些无法 验 证 宏 指 令 ,更 不 用 说 四五 轴 的机 床 了 。而 四五轴 加 工 中 心 有 许 多 种 形 式 ,有 立 式 的 、有 卧式 的 ;有 A B轴 、B C轴 、C A轴 ;有 的 是 工 作 台 翻 转 、
五轴数控加工CAM及程序后置验证方法

e a c h h y b r i d h o r i z o n t a l o r v e r t i c a l 5 - a xi s M C a s a n e x a mp l e. t he a u t h o r d e e p l y i n v e s t i ga t e d a n d s u mma —
文章编号 : t O 0 1 —2 2 6 5 ( 2 0 1 3 ) 0 8— 0 0 9 9— 0 5
五轴 数 控 加 工 C A M及 程 序 后 置验 证 方法
王 准
( 安徽 工程 大 学 机械 与汽车 工程 学院 , 安徽 芜湖 2 4 1 0 0 0 )
摘要 : 五轴数控加工任务 中, 数控程序的设计 , 必须从 工艺 系统 角度 , 通盘考虑并借助 C A M 方法才能 完成 ; 而程序代码 的正确 与否, 还 需要 通过后 置验 证手段 , 才能确定。文章从 制造 系统层 面 , 以混合 型立 卧五 轴 加工 中心上 , 各 自加 工两种减速器下箱体零件 为例 , 全 面研 究并 总结 出五轴数控加 工 中, 利 用计算机辅 助
技术, 完成 从 工 艺 系统 设 计 准 备 到 最 终 数 控 加 工 验 证 工 作 的技 术 原 理 与 方 法 。 这 些 原 理 和 方 法 是 具 备 普 遍 性 和 实用 性 的 , 可 以被 五 轴 加 工 中心使 用 者借 鉴 , 以提 高 其 生 产过 程 中 的质 量 、 效 率 与成 本 目标 。 关键 词 : 五轴加 工数控 程序 ; 工艺 系统 ; 工装设 计 ; 后 置 验 证 中 图分类 号 : T P 3 9 1 文献标 识码 : A
基于VB BVI00五轴联动加工中心后置处理的研究
lt m gec a e oktm nayiihr m le ope retaotyr l asii d{ r ant l ce au l, s a tc pe m l po c buhda itnmso a o iv v s s l t do o tc x j s u cr sn n
唐 清春 张仁 斌 何 俊 赖玉 活 (广 西工学 院 工程 训练 中心 , , 柳州 550 )( 40 6 四川 工程职业 技术学 院 机 电系 , 阳 6 80 ) 德 100 (柳州市 数控机床 研究所 , s 柳州 5 50 ) 4 07
Th e e r h o o t r c s or orB 0 5 a i c iig c n e b s d O e r s a c fp s p o e s V1 一 xs ma hn n e t r a e n VB f O T N ig e u Z A G R n bn, EJ n,A u h o A G Q n — h n .H N e — i2H IL I - u。 u Y
标系 , 再将刀位点变化到新 的加工工件坐标系中1 需要开展的主 2 1 。
要工作有以下三个方面 :
工修改才能执行 , 影响 了数控设备的使用效率【 为提高 自动编程 l J 。
效率 , 充分发挥加工设备优势 , V 在 B语言 的基础上 , 针对 B O VI0 双转 台五轴联动加工 中心和配置的 Se e s 4 D数控系统开发 im n 0 8
第 2期 21 0 2年 2月
文 章 编 号 :0 1 39 ( 02 0 — 0 3 0 10 — 9 72 1 )2 0 7 — 2
机 械 设 计 与 制 造
Ma h ne y De in c i r sg & Ma u a t e n f cur 73
带RTCP功能五轴机床后置处理程序的编制
MANUFACTURING INFORMATIZATION 仿真 / 建模 / CAD/ CAM/ CAE/ CAPP
带 RTCP 功能五轴机床后置处理程序的编制
任锐 1, 张建 1, 张玉芳 2 (1.中船重工集团公司第 713 研究所 郑州 450052;2.UFC 公司,北京 100061)
摘 要:针对不带 RTCP 功能的五轴机床,利用矩阵,计算其空间坐标系旋转后新的坐标值,得出通用公式,进而引出带
收稿日期:2009-03-30
机械工程师 2009 年第 6 期 69
给实际使用带来了很大的麻烦。近期的控制系统新版本
基本上都带有 RTCP 选项功能,优点是坐标变换由控制
器来计算,加工程序可以保持不变,使用中不用总更换程
序。两者计算原理是一样的,所以本文论述五轴机床后置
处理计算的通用数学原理,便于我们在今后的使用中,视
情况来决定是否选用 RTCP 功能。
3 四轴机床后置处理的计算
1 后置处理简介 数控机床的控制系统有许多种,不同的控制系统所
识别的机床语言是不同的。用来控制某台机床走刀的数 控程序必须是该机床所识别的语言。用某种自动编程软 件设置好参数,经过刀具轨迹计算生成刀具位置源文件 (cutter location source file)。不过这种刀具位置源文件是 机床控制系统识别不了的,必须利用某种后置处理文件, 将刀具位置源文件转化为机床控制系统识别的数控程 序。把刀具位置源文件转化为机床控制系统识别的数控
基于UGNX的5轴联动高速铣削加工中心后置处理软件的研发
摘要摘要本论文首先从分析刀轨文件和NC代码的格式入手,找出指令的一一对应关系,弄清诸多从建摸到加工过程中的坐标系统,建立5坐标铣削中心坐标转换数学模型,从而实现从刀轨文件提取信息转化为Nc代码的算法。
然后利用VB语言编写出易于操作的功能界面,从而实现了人机对话功能,后置处理软件包括后置处理、工艺系统和仿真三大主要模块,及一些辅助模块。
后置处理模块主要是完成代码的读取及转换和保存;工艺系统是通过对机床刀具,夹具,工件材料,切削参数进行分析,对于不同类型数据之间建立对应关系,使用Access对机床工艺信息建立关系数据库,并通过VB6.0设计可视化界面,两者之间用VB6.0中的数据控件进行绑定,运用SQL语言实现查询,建成一个提供共享的高速铣削加工中心工艺数据库管理系统,补充了后置处理软件的功能;仿真是通过数控加工仿真软件VERlcuT5.3,对CLSF文件进行仿真,看其是否产生过切现象,也可以对转化好的NC文件进行仿真设置。
最后,通过wATERsON塑料瓶的模具加工实例,先利用UGNX的CAD功能,进行实体建模,完成模具造型;再选择机床夹具使其能在加工中心上进行加工;规划其工艺加工方案,确定切削参数,用UG的CAM生成CLSF文件,对CLSF文件进行仿真,通过本软件的后处理之后形成NC文件。
关键词:后置处理坐标转换工艺数据库仿真UGAbstractABSTRACTThepaperisincludedthefollowingparts.Firstly,theformatofCLSFandNCshouldbeanalyzed,thearithmeticofconversionbetweentheCLSFandNCshouldbesetup.Secondly,theinterfacetendingtooperateshouldbecompiledbyVB.Itisincludedthreemainparts,post-process,technicssystem,andemulation.Read,conversion.andsavingoftheCLSFiscarriedoutinthepost-processpart;Thecuttingtool,thefixture,themoldmaterial,andthecuttingparameterarefirstlyanalyzed,thentherelationsamongthema托found,atlastthedatabaseshouldbebuiltbyAccess.Thedatabetween也eAccessandVBiSconnectedtocompletethedatainquireandmodificationbySQLruleofVB.Sothetechnicsdatabasemanagementsystemattachedthefunctionofthepost-processtechnologyshouldbefinishedinthetechnicssystempart.TheCLSFshouldbeemulatedandcheckedwhetherover-cuttingisoccurredbyVERICUT5.3,inaddition,thefinishedNCmaybeconfiguredandemulated..Finally,themoldofaplasticbottleismade船asample.First.itisformedwithUGNXCAD.Thenafixture,thecuttingtool,andmoldmaterialshouldbeanalyzedandselectedforthemoldmachininginthemachiningcenter.Afterthecuringparametersshouldbecalculated.theCLSFisexportedbyCAM.TheCLSFshouldbeemulatedbyVERICUT5.3.AtlasttheCLSFprogramisconvertedtotheNCbyTJPPl.0.KeyWords:post-process,coordinateconversion,technicsdatabase,UGⅡ声明本人郑重声明:本论文是在导师的指导下,独立进行研究工作所取得的成果,撰写成博士/硕士学位论文竺基王卫g盟圣的墨毡珐塾直运继堂4加工生!坠厦量处理筮往丝班筮”o除论文中已经注明引用的内容外,对论文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
摆头转台加工中心五轴联动加工的后置处理与仿真验证_吴海兵
135
文章编号:1001-3997(2011)11-0135-03
摆头转台加工中心五轴联动加工的后置
处理与仿真验证 *
吴海兵 1 陈小岗 1 许兆美 2 (1 淮阴工学院 数字化制造技术重点建设实验室,淮安 223003)
(2 淮阴工学院 机械工程学院,淮安 223003)
Postprocessor and simulation of 5-axis machining center of table-rotating/tilting type
比如海德汉 iTNC530 的 M126 指令。机床控制系统没有内置的最
短距离旋转的指令,因此后置处理程序还要能够实现 C 轴最短距 离旋转功能。如上所述,C 轴旋转特性为 EIA(360°绝对),即 C 转角 的正负号定义旋转方向(正号逆时针旋转,符号顺时针旋转),C 转 角的绝对值定义绝对位置。3.2.2 计算出来的 C 角显然只确定了刀
手段。该技术具有技术含量高、精密度高、适于加工复杂曲面的特
点,对一个国家的航空、航天、军事、科研、精密器械、高精医疗设
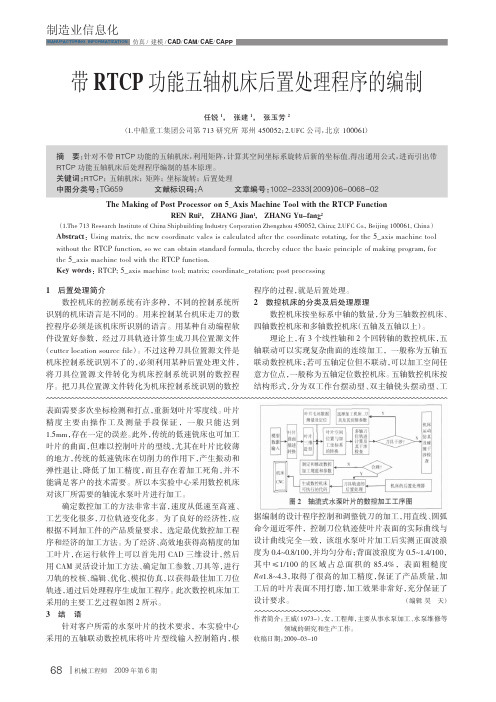
图 1 机床照片
备等行业具有重要的意义。
机床控制系统采用东芝 TOSS999 系统,该系统基本与 FAN
采用的 CAM 系统是 UG NX,其拥有通用的后置处理模块。 UC 系统相似。高级五轴控制系统一般都带有 RTCP(即旋转刀具
中图分类号:TH16,TG659 文献标识码:A
1 引言
数控加工的后置处理是指读取由 CAM 系统生成的刀位文 件,从中提取相关的加工信息;并根据指定数控机床的特点及 NC 程序格式要求进行分析、判断和处理;最终生成数控机床能直接 识别的 NC 程序[1]。
CAM 系统在计算刀具轨迹时,假设工件不动,刀具相对于工
双摆头五轴联动加工中心后置处理仿真与优化
组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing TechinnueNo.5May 2021第5期2021年5月文章编号 #1001 -2265(2021)05 -0146 -03DOI : 10.13462/j. cnki. mmtamt. 2021.05.034双摆头五轴联动加工中理仿真与优化**收稿日期:2020-06 - 17 ;修回日期:2020-07 -14*基金项目:科研计划(17JK0402);西安航空职业技术学院2017年度科研计划 (17XHZH-016)作者简介:(1981—),男,,西安航空职业技术学 授,工学 ,研究方向为计算机辅助设计与制造、数控加工技术,(E-mail)xgfo@ 163. com.佛新岗(西安航空职业技术学院,西安710089%摘要:为了提升数控机床加工的综合效能,基于UG 软件开发了 WALDRIEH COBUR 五轴联动龙门加工中心机床配套的Heidenhain530数控 用后处理程序。
以航空叶轮为载体,通过VERICUT 软件构建了虚拟机床模型,并对后处理输出的NC 程序进行了验证 化。
实 :优化后的NC 程序加工进 更加合理,减少了刀具磨损,降低了 成本,同时提高了加工 和质量,具有较的实践应用价值。
关键词:双摆头;后置处理;VERIUT ;虚拟机床;优化中图分类号:TH133 :TG71 文献标识码:ASimulation and Optimization of Post-Processing of 5-Axis Machining Center with Dual Rotary HeadsFO Xin-gang(Xi'an Aeronautical Vocation and Technical Co/eye , Xi'an 710089 , China )Abstrad;: In order W improve We comprehensive efficiency of NC machine tools , the special post proces s ing program for Heidenhain 530 NC system is developed with UG software , which is used in WALDRICH COBUR 5 -axis machining center. Taking the aviation imp —ler as We carrier , the virWal machine tool mod- e3isconstructed by VERSCUTsoftware , and the NC program outputby post-proce s ing wasverified and optimi eed. The practice shows that the optimi eed NCprogram proce s ing feed rateismorereasonab e , re ducing too3wear , reducing production costs , whieimproving theproce s ing e f iciency and quaity , with good practica3app ication va3ue.Key wors : dual rotary heads ; post processing ; VERICUT ; virtual machine tool ; optimization0引言着航空航天、汽车、国防工业、 、模具等行业的快速 ,机 产品的 设计越来越复杂,同 对工效率和质量提出了 的 ,特别是空间复杂曲面 工难度不 , 联数控加工中在这一 得到了广泛应用。
五轴数控加工3D刀具补偿及其后置处理方法
五轴数控加工3D刀具补偿及其后置处理方法全文共四篇示例,供读者参考第一篇示例:随着制造业技术的不断进步,数控加工技术已经成为制造业中不可或缺的重要环节。
而在数控加工中,五轴数控加工技术由于其能够完成更为复杂、精密的加工工艺,受到了越来越多制造企业的青睐。
在五轴数控加工中,3D刀具补偿是一个至关重要的环节,它能够帮助提高加工质量和效率。
本文将从五轴数控加工3D刀具补偿的基本原理、常用方法以及后置处理方法等方面进行介绍。
一、五轴数控加工3D刀具补偿的基本原理1.1 3D刀具补偿的概念3D刀具补偿是指在数控加工过程中,通过对刀具轨迹进行补偿,使得实际加工轨迹与设计轨迹保持一致,从而达到精确加工的目的。
在五轴数控加工中,由于加工对象通常是复杂曲面或立体结构,因此需要对刀具轨迹进行三维补偿,以确保加工精度。
1.2 刀具轨迹误差的原因在五轴数控加工中,刀具轨迹误差主要受到机床动态响应、刀具偏心、刀具长度变化等因素的影响。
这些因素会导致实际加工轨迹偏离设计轨迹,从而影响加工精度和表面质量。
在实际加工中,通过对刀具轨迹进行3D补偿,可以对刀具偏差、刀具长度变化等进行校正,从而使实际加工轨迹更加接近设计轨迹。
常用的方法包括刀具半径补偿、刀尖补偿、刀具长度补偿等。
刀具半径补偿是指通过对刀具轨迹进行半径方向的补偿,以校正刀具切削半径偏差。
在五轴数控加工中,刀具通常以不同的姿态进行切削,因此需要根据刀具当前姿态对刀具轨迹进行三维补偿。
刀具半径补偿是常用的3D刀具补偿方法之一。
2.2 刀尖补偿在数控编程中,对刀具补偿的参数进行正确设置是保证加工质量的关键。
根据刀具类型、刀具位置、加工轨迹等因素,正确设置刀具补偿参数,可以有效提高加工精度和效率。
通过对刀具轨迹进行优化,可以减小刀具加工轨迹误差,提高加工精度。
在五轴数控加工中,刀具轨迹优化是一种常用的后置处理方法,通过对刀具轨迹进行优化,可以有效提高加工质量。
3.3 加工参数优化在实际加工中,调整加工参数也可以对刀具补偿效果进行优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4):设定程序结束前的机床动作,其中包括按顺序排列取消TCPM,关闭切削油,停止主轴转动,Z轴抬到安全的位置以便A C轴回原点。
进
5):设定程序结束
最后保存退出,在保存目录下会生成这三个文件分别是:ucp710.def ucp710.tcl ucp710.pui
第二种,利用VC++计算机语言,按数控机床的运动方式和控制系统的编程规范,归纳出计算空间点坐标的数学公式,通过编制专用的后置处理程序并生成可执行文件,定义数控机床的后置处理。
在这我们只对第一种方法进行讨论。
首先在做后置前要熟悉机床参数。
1)Mikron UCP710的机床技术参数:
Xaxis710mm
10 ;
11 ; ==== OPERACAO: VARIABLE_CONTOURHale Waihona Puke COPY - FERR.: T0 R3
12 ; ==============================================================
13 CYCL DEF 7.0 DATUM SHIFT
编辑Z并设定Expression为$mom_alt_pos(2)
C、
添加如下语程序
注意
rap1 Expression为$mom_alt_pos(0)
rap2 Expression为$mom_alt_pos(1)
rap3 Expression为$mom_alt_pos(2)
AExpression为$mom_out_angle_pos(0)
6 ; POSPROCESSADOR: E:\WORK\POST\UG\5A\MIKRON_ORG.TCL
7 ; REVISAO : - DATA:3/11/06
8 ; --------------------------------------------------------------
9 M126
3)进入设定刀轨移动关系
A、
编辑X并设定Expression为$mom_alt_pos(0)
编辑Y并设定Expression为$mom_alt_pos(1)
编辑Z并设定Expression为$mom_alt_pos(2)
B、
设定如下
*
注意1:
编辑X并设定Expression为$mom_alt_pos_arc_center(0)
45 LX-10.543 Y-11.556 Z118.856 A39.681
46 LX-10.058 Y-11.025 Z119.43 A37.526
47 LX-9.623 Y-10.547 Z119.91 A35.643
48 LX-9.233 Y-10.12 Z120.312 A33.997
49 LX-8.534 Y-9.354 Z120.974 A31.119
关键词:五轴加工中心 UG Postbuld VERICUT
1、任务的来源
2001年冬,本中心购置了一台由瑞士MIKRON品牌的五轴联动加工中心,型号为——UCP710。如图1所示,此机床为工作台双摆动结构,(俗称:Table—Table双摆台)。通过X/Y/Z三个线性轴、定轴A轴的摆动和转动轴C轴的转动实现五轴联动加工。该机床的控制系统是德国的Heidenhai iTNC 430。目前,后置处理文件是计算机辅助制造软件中CAM与机床控制系统之间沟通的桥梁,是实现多轴加工的关键之一。同时本中心现配有CAD/CAM软件——UG,为了让UCP710早日投入到教学与生产加工,我们必须解决后置处理的问题。
五轴联动加工中心后置处理的编写与验证
五轴联动加工中心后置处理的编写与验证
摘要:本文针对瑞士MIKRON UCP710工作台双摆动式五轴联动加工中心机床的运动原理,以及Heidenhain iTNC430控制系统的特点,阐述运用UG软件中后处理工具——UG POSTBUID3.4.1,定制适合ucp 710五轴后处理的开发思路,并且通过VERICUT模拟软件进行模拟验证成功。目前成功开发出来的五轴后处理已在本校实训中心MIKRON UCP710五轴机床中得以全面应用,顺利地完成了各种3~5轴的零件加工。
24 LX-16.513 Y-18.099 F200. M8
25 LX-16.493 Y-18.077 Z101.211 A87.167 F3000.
26 LX-16.437 Y-18.016 Z102.34 A84.519
27 LX-16.354 Y-17.925 Z103.392 A82.041
50 LX-7.996 Y-8.764 Z121.436 A28.961
51 LX-7.167 Y-7.855 Z122.072 A25.723
52 LX-6.314 Y-6.92 Z122.638 A22.479
53 LX-5.557 Y-6.091 Z123.071 A19.666
54 LX-4.884 Y-5.353 Z123.404 A17.204
图1 UCP710
如上图所示在机床结构方面,应注意我们假定工件不动、刀具运动,在此前提下来看A轴和C轴的摆动,此时符合笛卡尔坐标系(直角坐标系)下的右手定则;而工作台A轴和C轴的实际转动方向是与右手定则相反的。
下来我们启动UG POSTBUID后置处理模块,
第一步:新建后置文件,文件名为:ucp710。确定机床的类型、公/英制、机床的操作系统(如下图所示)
注意:
M126是最小角度转动功能M126,它是取消第四轴C轴的液压锁紧,确保联动。
TCPM(Tool Center Point Management刀具中心点管理)指令是多轴后置处理软件简化的基础。传统意义上的后置处理软件(即不具备TCPM功能),必须输入刀轴的回转中心距(刀轴摆动式)或转台两轴线(转台摆动式)的位置关系,后置处理程序才能完成坐标转换;随着控制系统技术的发展,越来越多的控制系统厂家在其高端产品中都加入了上述坐标转换的功能,如Heidenhain的M128指令就是上述功能。打开M128,工件的坐标原点可以任意设置,由控制系统计算工件坐标和各转轴轴线的关系,加工准备更为简单方便,还可以在程序中保证刀尖的进给速度恒定。对于后置处理软件来说,可以略去上述的坐标转换的计算,后置处理软件的开发难度降低,生成的加工程序在同类型设备中具有相对更大的通用性。要注意的是程序在结束抬刀前与换刀前应用M129即取消TCPM功能。
2、UCP710 post开发的过程
目前,常用的后置处理方法主要有以下两种:
第一种,利用CAD/CAM软件的通用后置处理模块,定义数控机床的运动方式,通过选取CAD/CAM软件提供的机床标准控制系统,定义某一类型或某台数控机床的后置处理。如PowerMILL的PM—post模块,UG的UG POSTBULD模块;
0 BEGIN PGM text_post-1 MM
1 ; ARQUIVO : E:\TEXT POST\text_post-1.prt
2 ; FEITO POR: YWM
4 ; MIKRON: ITNC430
5 ; --------------------------------------------------------------
14 CYCL DEF 7.1 #1
15 ;==== TROCA DE FERRAMENTA ====
16 LM129
17 TOOL CALL 1 Z S10000 DL0.0 DR0.0
18 LM3
19 LZ-60. F MAX M91
22 LZ300.
23 LM128 F200.
20 LA90. C317.624 FMAX
36 LX-14.561 Y-15.96 Z111.553 A61.864
37 LX-14.266 Y-15.636 Z112.338 A59.761
38 LX-13.991 Y-15.336 Z113.012 A57.92
39 LX-13.476 Y-14.77 Z114.16 A54.694
40 LX-13.06 Y-14.315 Z114.992 A52.272
32 LX-15.689 Y-17.196 Z107.642 A71.824
33 LX-15.532 Y-17.024 Z108.319 A70.15
34 LX-15.201 Y-16.662 Z109.568 A67.012
35 LX-14.875 Y-16.304 Z110.637 A64.267
Information listing created by : YWM
Date : 2007-4-25 11:14:00
Current work part : E:\TEXT POST\text_post-1.prt
Node name : ywmacer
============================================================
6):运用UG编写刀具轨迹。
如下图,我们采用多轴加工模块,选择变轴加工方式,然后选择curve/point的驱动方式,并选择Normal to Part刀轴控制,其他的参数按常用的公共参数设置。
程序编好后选择已经编写好的后置处理(UCP710)如下图所示:
按OK后生成NC代码如下:
============================================================
现在国内多轴机床后置处理程序的开发已慢慢开始发展,但很多的资源还要通过国外进行技术支持。即使客户选购能够实现多轴加工编程的软件,但还要额外支付昂贵的后置开发费用才能实现软件与机床的“通讯”。开发通用的编写后置处理工具软件,可以有效地保证NC程序正确性,提高编程人员的后置处理技术以及效率,还可以把零件加工信息(如图号、工序号、刀具规格、程序加工时间等参数)嵌入NC程序中,提高加工的安全性,增加程序的可读性,减少操作人员的人为加工误差。