电磁波测距课件
合集下载
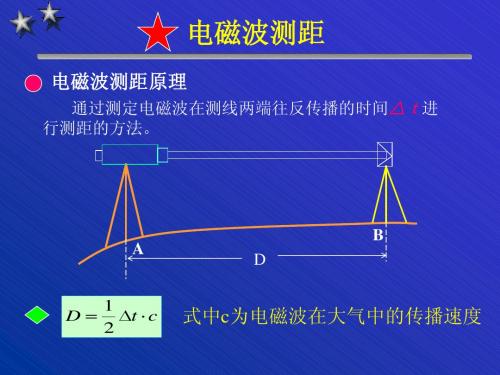
电磁波测距

相位差除了用鉴相器测量之外,还可采用可变光路法,即用仪器内部的光学系统改变接收信号的光程,使该 信号延迟一段时间。电子仪表指示发射信号与接收信号相位相同时,直接在刻划尺上读出尾数。此外,还可以用 延迟电路来改变接收信号的相位,由该电路调整控制器上的分划,读出尾数。
分类
电磁波测距仪根据载波为光波或微波而有光电测距仪和微波测距仪之分。前者又因光源和电子部件的改进, 发展成为激光测距仪和红外测距仪。
在发展激光测距仪的同时,60年代中期出现了以砷化镓管作为光源的红外测距仪。它的优点是体型小,发光 效率高;更由于微型计算机和大规模集成电路的应用,再与电子经纬仪结合,于是形成了具备测距、测角、记录、 计算等多功能的测量系统,有人称之为电子全站仪或电子速测仪。这种仪器的型号很多,测程一般可达5公里,有 的更长,测距精度为±(5毫米+3×10D),广泛用于城市测量、工程测量和地形测量。
测量仪器
光电测距仪
微波测距仪
早期的光电测距仪采用电子管线路,以白炽灯或高压水银灯作为光源,体型大,测程较短,而且只能在夜间观 测。60年代末出现了以氦氖激光器作光源、采用晶体管线路的激光测距仪,主机重量约20公斤,测程可达60公里, 而且日夜都可以观测,测距精度约为±(5毫米+1×10D)。70年代出现了通过双载波测距、自动改正大气折射影响 的激光测距仪,测距精度又有了进一步的提高。1979年更出现了三波长测距仪,使测距精度达到了千万分之一。
微波测距仪、激光测距仪、红外测距仪和多载波测距仪均属于相位式测距仪。激光人造卫星测距仪和激光地 形测距仪则属于脉冲式测距仪。在水利工程测量中,测距为2公里或5公里的中短程红外测距仪已得到广泛有效的 应用。短程精密激光测距仪在大坝变形观测亦已发挥重要作用。微波测距自动定位系统已在大面积水下地形测量 中成功运用。
分类
电磁波测距仪根据载波为光波或微波而有光电测距仪和微波测距仪之分。前者又因光源和电子部件的改进, 发展成为激光测距仪和红外测距仪。
在发展激光测距仪的同时,60年代中期出现了以砷化镓管作为光源的红外测距仪。它的优点是体型小,发光 效率高;更由于微型计算机和大规模集成电路的应用,再与电子经纬仪结合,于是形成了具备测距、测角、记录、 计算等多功能的测量系统,有人称之为电子全站仪或电子速测仪。这种仪器的型号很多,测程一般可达5公里,有 的更长,测距精度为±(5毫米+3×10D),广泛用于城市测量、工程测量和地形测量。
测量仪器
光电测距仪
微波测距仪
早期的光电测距仪采用电子管线路,以白炽灯或高压水银灯作为光源,体型大,测程较短,而且只能在夜间观 测。60年代末出现了以氦氖激光器作光源、采用晶体管线路的激光测距仪,主机重量约20公斤,测程可达60公里, 而且日夜都可以观测,测距精度约为±(5毫米+1×10D)。70年代出现了通过双载波测距、自动改正大气折射影响 的激光测距仪,测距精度又有了进一步的提高。1979年更出现了三波长测距仪,使测距精度达到了千万分之一。
微波测距仪、激光测距仪、红外测距仪和多载波测距仪均属于相位式测距仪。激光人造卫星测距仪和激光地 形测距仪则属于脉冲式测距仪。在水利工程测量中,测距为2公里或5公里的中短程红外测距仪已得到广泛有效的 应用。短程精密激光测距仪在大坝变形观测亦已发挥重要作用。微波测距自动定位系统已在大面积水下地形测量 中成功运用。
电磁波测距

已知:时标脉冲频率f=15 MHz,电磁波速度C=3×10E+8 m/s, 时标脉冲个数 n=100。
求: 距离 D。
D= 1/f × n×C / 2= 1000 米
测距前,电子门是关闭的,时标脉冲不能进入计数系统。 测距时,在光脉冲发射的瞬间,主脉冲把电子门打开,时标脉 冲就一个一个经过电子门进入计数系统,计数系统开始记录脉 冲数目。当回波脉冲到达时电子门关闭,计数系统停止计数, 计数系统记录下来的脉冲数目就是所测距离值。
光脉冲发射器
光电接收器
电
子
时标脉冲
门
振荡器
取样棱镜
脉冲法测距的工作原理框图
计数及显 示系统
t 2D nt (光脉冲在测线上往返传播的时间)
D
1 2
Ct2 D
D C nt nd 2
只要选定一个d值(10m、 5m、1m),记录计数系 统的脉冲数目n,就可把 所测距离(nd)显示出 来。
式中:n为时标脉冲的个数;d=C·t/2,即在时间t内光脉冲 所走的一个单位距离。
4.1.1 调制的意义和分类
光波调制:使光波的振幅、频率或相位发生有规律变化的 过程。调制有调幅、调频、调相三种。激光测距仪大多用调幅。
电磁波测距仪中的光波调制是利用了某些物体在外信号的 作用下所具有的物理现象和效应(如光电效应、磁光效应,声 光效应等),其完成调制过程。激光器和调 制器是一个整体。GaAs半导体激光器或发光二极管。
4.2.1 电磁波和电磁波谱 电磁波:根据麦克斯韦电磁场理论,变化的电场能够在它
的周围引起变化的磁场,这个变化的磁场又在较远的区域内 引起新的变化电场,并在更远的区域内引起新的变化磁场。 这种变化的电场和磁场交替产生,以有限的速度由近及远在 空间内传播的过程称为电磁波。
第四章 电磁波测距

4.6.2
N
值的确定
由式(4-30)可以看出,当测尺长度 u 大于距离 D 时,则 N 即 D u
2
0
。,此时可求得确定的距离值, 。因此,为了扩大单值解的测
u N
程,就必须选用较长的测尺,即选用较低的调 制频率。根据 u
2 c 2f
,取 c 3 1 0
f2
c 2 f1
;粗尺频率
,相应的测尺长度为 u 2
D u1 ( N 1 N 1 ) D u2 (N 2 N 2 )
2D
而 t 是由时标脉冲振荡器不断产生的具有时间间
2D
隔( t )的电脉冲来决定的。 因 则
t2 D n t
D V 2 nt nd
式中, n 为时标脉冲的个数; d
V 2
t
,即在时间间
隔 t 内光脉冲往返所走的一个单位距离。所以我们只要 事先选定一个 d 值(例如l0m,5m,lm等),记下送 入计数系统的脉冲数目,就可以直接把所测距离 ( D nd )用数码管显示出来。
徕卡TCR系列全站仪
无棱镜测距应用: • • • • 大容积标定行业 工程安装质量检查 隧道断面测量 城市地籍、房产测 量 • „„
安装质量检 查
油罐容积标定测 量
隧道断面测 量
徕卡TCR系列全站仪
应用优势 一方面,省去了作 业员爬高下低的奔 波之苦,作业强度 和危险性也大大降 低; 另一方面,对一些 重要的建筑(比如 文物)起到了一定 的保护作用。
§4.6相位法测距的基本原理 4.6.1基本原理及基本公式 1.基本原理 由载波源产生的光波(或微波)经调制器被高频电波所调制(调 幅或调频),成为连续调制信号。该信号经测线达到彼端反射器, 经反射后被接收器所接收,再进入混频器(I),变成低频(或中频) 测距信号 e 测 。另外,在高频电波对载波进行调制的同时,仪器发射 系统还产生一个高频信号, 此信号经混频器 (II) 混频后成为低频 (或 中频)基准信号 e 基 。e 基 和 e 测 在比相器中进行相位比较,由显示器显 示出调制信号在两倍测线距离上传播所产生的相位移,或者直接显 示出被测距离值。
《雷达测距方法》课件

3
技术优势
精确度高、抗干扰能力强、成本较低,是科学研究和工程应用中最广泛的雷达测 距方式之一。
连续波雷达测距技术及其应用
合成孔径雷达
连续波雷达的一种,通过加工 处理连续发射的波形信号,可 实现高分辨率的成像效果,广 泛应用于地质勘探和测绘。
微波医学诊断
连续波雷达的一种,通过测量 人体组织的微波信号来进行诊 断。可应用于心肺听诊、病变 诊断等方面。
按功能分类
雷达可分为追踪雷达、搜 索雷达、指挥雷达等。应 用范围非常广泛,如导弹 制导、天气预报、交通控 制等。
雷达测距系统的组成
前端部分
包括天线、前置放大器等硬 件设备以及网络接口、处理 器等软件设施。
中间部分
包括信号发生器、发射器、 接收器等部件。信号发生器 产生电磁波信号,发射器发 射信号,接收器接收反射波 信号。
安全检测和监测
连续波雷达可以检测到人体的 呼吸和运动信息,可在安全检 测和监测方面发挥作用,如楼 宇安保、交通监控等。
相干雷达测距技术及其应用
基本原理
相干雷达通过测量接收信 号的相位信息,可以实现 更高的测距精度。
应用领域
相干雷达通常应用于大气、 海洋和地质等领域,如气 象预报、海浪预测、地震 监测等。
技术挑战
相干雷达的研制和应用需 要高精度的硬件和复杂的 算法,技术难度较大。
小结
雷达测距方法是一种非常重要的测量技术,广泛应用于军事、民用、科研和 工程领域。不同类型的雷达测距技术有着各自的特点和应用场景,对于不同 的需求和问题,需要选择最适合的雷达系统。
雷达测距方法
雷达是一种电磁波测距设备,可以通过发送电子脉冲或连续电磁波来探测目 标的位置,是现代科技领域的一项重要技术。
第四章电磁波传播与GPS卫星信号PPT课件

0
1
0
0
15
四级移位寄存器产生的伪随机码的特性
码序列:111100010011010111100010011010
钟频:fc ;
码元宽度:τ0=1/ fc ;
码长:Nu=24-1=15bit; 周期:T=τ0. Nu ;
自相关系数:对齐:1,不对齐:-1/15。
r级移位寄存器产生的伪随机码的特性
码元宽度:τ0=1/ fc ; 码长:Nu=2r-1; 周期:T=τ0. Nu ; 自相关系数:对齐:1,不对齐:-1/(2r-1)。
P码的周期长,267天重复一次。P码的捕获一 般是先捕获C/A码,再根据导航电文信息,捕获 P码。由于P码的码元宽度为C/A码的1/10,若 取码元对齐精度仍为码元宽度的1/100,则相 应的距离误差为0.29m,仅为C/A码的1/10, 故P码称为精码。
根据美国国防部规定,P码是专为军用的。目前 只有极少数高档次测地型接收机才能接收P码, 而且美国国防部的AS政策更是绝对禁止了非特 许用户应用。
8
相位测距的测尺
相位测距是对发射的激光强度进行余弦型调制,光波每传播一个 调制周期,相位就变化2,相应的传播距离为 =cT。所以距离d、 光波往返相位差和光波调制波长之间的关系为
2d 2
应当注意到:此处的并不是光的波长,而是余弦型调制造成的 光强变化对应的强度“光波”的“波长”,该调制波长实际上是
二进制码的模二加法等价于电位的乘法。 码序列——将r比特的二进制数看作是由0、1组成的序列。 2)随机码——在一个码序列中,0和1出现的概率相等,而某一码元是0或
是1却是随机的,事先无法确定的,这样的码序列叫随机码。 随机码特点:非周期性序列;自相关性好;无法复制。 自相关性用自相关系数表示, 自相关系数——将U(t)平移k个码元,平移后与平移前两序列相同码元 个数A,相异个数B,(A-B)/(A+B)叫自相关系数,用R(t)表示。 自相关性好——原码与复制码对齐R(t)=1,不对齐≈0。
08-电磁波测距原理

λ
A
D
B
1 D = ( nλ + ϕ ) 2
§4.6 相位法测距
1. 相位法测距的基本原理
设仪器发射角频率为ω的正弦波信号: 设仪器发射角频率为 的正弦波信号: 的正弦波信号
u发 = Vm sin(ωt + ϕ 0 )
式中: 为振幅, 为角频率, 为时间, 为初相位, 式中:Vm 为振幅,ω为角频率,t为时间,φ0为初相位, 则正弦波在发射、反射、接收时的相位分别为: 则正弦波在发射、反射、接收时的相位分别为:
以AGA-8型为代表 型为代表 的激光测距仪, 的激光测距仪,曾在我 国天文大地网和特级导 线中得到广泛应用。 线中得到广泛应用。
AGA8激光测距仪 激光测距仪
§4.3 电磁波测距
微波测距仪
用电磁波微波做为载波,可在全天候的条件下作业, 用电磁波微波做为载波,可在全天候的条件下作业,但由于 易受到微波地面反射误差的影响, 易受到微波地面反射误差的影响,测距精度一般为 (10mm+3×10-6·D) 。 × ) 改进后的CMW20型微波 型微波 改进后的 测距仪, 测距仪,减弱了地面发射误差 的影响,测距精度为 的影响, (5mm+3×10-6·D)在工程测 × ) 量领域有着广泛地应用。 量领域有着广泛地应用。
4. TAC电路及校正 TAC电路及校正
TAC电路 电路 Time Amplitude Circuit,时间幅值转换电路 , 功能 准确测定延迟时间,提高距离测量精度。 准确测定延迟时间,提高距离测量精度。 原理 将时间量的测定转换为对电压幅值的测定
§4.5 脉冲法测距
开始信号 参考信 (15MHz) ta TAC 接收信号 t2D
电磁波精密测距
第四章 电磁波测距

脉冲发射
脉冲接收
反 射 器
器
A
D
B
重庆交通大学土木建筑学院测绘系<<控制测量学>>
2007.5.9
3
一、电磁波测距的基本原理
2、相位式测距原理公式
它是用一种连续波(精密光波测距仪采用光波)作为“运 输工具”(称为载波),通过一个调制器使载波的振幅或频 率按照调制波的变化做周期性变化。测距时,通过测量调制 波在待测距离上往返传播所产生的相位变化,间接地确定传 播时间t,进而求得待测距离D。
在上式中u=λ/2是已知的,ΔN可测出(测相器只能测定余长 uΔN,而不能测出整周数N)但仍有两个未知数,即待测距离D和整周 数N,这就使距离产生多值性,如能解出N,距离D就成为单值解。 由于测相器只能测定余长uΔN,而不能测出整周数N,例如用一个频 率测得2.578m,它可以是尾数都是2.578m的若干个大数不同的距离。这 好比担任量距的人记不住已经量了多少整尺段,只记得最后不足一个整尺 段的余长。显而易见,一个频率的测量只能得到余长而解不出N。如果选 择“测尺”(或频率)大于待测距离,则上式变成D=uΔN,这可解出距离D。 但由于测相精度只能达到10-3,所以想要用单一频率的测量来获得距离的 单值解,则精度和测程就不可能兼顾。
重庆交通大学土木建筑学院测绘系<<控制测量学>>
2007.5.9
11
二、距离观测值的改正
• 第一类仪器本身所造成的改正:加常数 置平 乘常数(频率) 周期误差 • 第二类大气折光而引起的改正:气象 波道弯曲 • 第三类归算方面的改正:倾斜和投影到椭球面上(下册)
调制波的调制频率 f
角频率 周期T 波长
2f
08 电磁波测距
精测:利用测相技术即可得到△φ,利用计数即可得到角度 测 量小数部分。
全站仪极其使用
全站仪——能同时完成测距、测角、测高功能的仪器。
全站仪分类: 光学经纬仪+测距仪 积木式(分离式): 一体化 我校全站仪种类: 1. TOPOCON (拓普康)GTS-212 全站仪(日本) 2. 蔡司 Eita 55 全站仪 (德国) 电子经纬仪+测距仪
c0 =299792458 m/ s
式中c0为光在真空中的速度 ng为光在大气中传输折射率
Ls
2
c0 2n g f
称为光尺
D Ls ( N N )
讨论:
1. 频率f1=15MHz , LS1=? , f2=150kHz , LS2=?
2. 当分辩率为1/1000时,LS1 , LS2 测距精度为多少?
2. 仪器检验: 由计量单位进行
①测距频率检验:频率稳定度1×10-6 , 15MHz容许差多少? ②周期误差检测
相位误差
测 距 矢 量
合成矢量 固定误差矢量
相位误差
3. 加常数、乘常数测定:在基线场进行
vij k d ij d0 R d ij Dij
测距仪分类
按 光 源 分:微波测距仪
二、动态测角系统
LS: 固定光栅(零分划线) LR: 活动光栅(指标线)
3600 0 : 栅距 21 05 1024
n0
粗测:度盘上每90°有一个标志分划。LS 起动 LR 计数关闭, 可统计相应时间,T0为φ所对应时间。
ni Ti T0
利用4个 ni 比较剔除粗差,取平均为 n,测 出角可能是φ ,也可能是360°- φ
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
脉冲式测距仪 相位式测距仪 长程 几十公里 按测程 中程 数公里至十多公里 短程 3公里以下
1.2 电磁波测距仪的分级
1.3 常见的电磁波测距仪
常州大地仪器厂 D3030 测距仪
徕卡DI4-4L手持测距仪 徕卡 DI1001 测距仪 日本尼康 ND-21 测距仪
1.3 常见的电磁波测距仪
目录
1 2 3 4 5
电磁波测距概述
脉冲法测距的基本原理
相位法测距的基本原理
距离观测值改正
测距误差分析与精度评定
2 脉冲法测距的基本原理
光脉冲发射器 取样棱镜 光电接收器
时标脉冲 振荡器
电 子 门
计数及显 示系统
脉 冲 法 测 距 的 工 作 原 理
2 脉冲法测距的基本原理
测尺放大系数
3.1.1 直接测尺频率方式
3.1.2 间接测尺频率方式
3.1.2 间接测尺频率方式
目录
1 2 3 4 5
电磁波测距概述
脉冲法测距的基本原理
相位法测距的基本原理
距离观测值改正
测距误差分析与精度评定
4 距离观测值改正
测电磁波测距是在地球自然表面上进行的, 所得长度是距离的初步值。出于建 立控制网等目的,长度值应化算为标石间的水平距离。因而要进行一系列改正计算 。这些改正计算大致可分为三类: 其一是仪器系统误差改正;其二是大气折射率变 化所引起的改正;其三是归算改正。 仪器系统误差改正包括加常数改正、乘常数改正和周期误差改正。 电磁波在大气中传输时受气象条件的影响很大, 因而要进行大气改正。 属于归算方面的改正主要有倾斜改正、归算到参考椭球面上的改正 ( 简称归算 改正)、投影到高斯平面上的改正(简称为投影改正)。如果有偏心观测的成果, 还要 进行归心改正。对于较长距离(例如10km以上),有时还要加入波道弯曲改正。 某些类型的测距仪,通过设置比例因子, 在一定范围内可自动进行一些改正及 计算。例如Wild厂生产的DJ20等红外测距仪。 下面讨论对短程光电测距仪测定的距离进行改正计算。
4.1 测距误差分析
4.2 测距精度评定
Thanks
Presented by
武汉大学测绘学院
距离观测值改正
测距误差分析与精度评定
1 电磁波测距概述
图1 光电测距
1.1 电磁波测距仪的分类
以电磁波为载波传输测距信号的测距仪器统称为电磁波测距仪,可分为如下几类:
光波—激光测距仪, 红外测距仪 按载波 微波—微波测距仪
单载波—可见光, 红外光, 微波 按载波数 双载波—可见光与可见光, 可见光与红外光 三载波—可见光可见光和微波, 可见光红外光微波
2 脉冲法测距的基本原理
脉冲式测距优缺点 主要优点:测程远。 主要缺点:由于脉冲宽度和计数器时间分辨力的限制,所以应用于精密距离测 量受到限制。 目前脉冲式测距仪,一般用固体激光器发射出高频率的光脉冲,因而这类仪器 可以不用合作目标(如反射器),直接用被测目标对光脉冲产生的漫反射进行测距 ,在地形测量中可实现无人跑尺,从而减轻劳动强度,提高作业效率,特别是在悬 崖陡壁的地方进行地形测量,此种仪器更具有实用意义。
精密电磁波测距
Electro-magnetic Distance Measuring
Presented by
武汉大学测绘学院
目录
1 2 3 4 5
电磁波测距概述
脉冲法测距的基本原理
相位法测距的基本原理
距离观测值改正
测距误差分析与精度评定
目录
1 2 3 4 5
电磁波测距概述
脉冲法测距的基本原理
相位法测距的基本原理
4 距离观测值改正—乘常数改正
4 距离观测值改正—气象改正
4 距离观测值改正—气象改正
4 距离观测值改正—倾斜改正
5 距离观测值改正—归算至大地水准面的改正
目录
1 2 3 4 5
电磁波测距概述
脉冲法测距的基本原理
相位法测距的基本原理
距离观测值改正
测距误差分析与精度评定
4.1 测距误差分析
4.1 距离观测值改正—加常数改正
加常数
实际上,测距仪的加常数包含仪器加常数和反射镜常数,当测距仪和反射镜构 成固定的一套设备后,其加常数可测出。由于加常数为一固定值,可预置在仪器中 ,使之测距时自动加以改正。但是仪器在使用一段时间以后,此加常数可能会有变 化,应进行检验, 测出加常数的变化值(称为剩余加常数),必要时可对观测成果加 以改正。此外,不同厂家的仪器所配反射镜也不相同,使用时应注意配套。
目录
1 2 3 4 5
电磁波测距概述
脉冲法测距的基本原理
相位法测距的基本原理
距离观测值改正
测距误差分析与精度评定
3 相位法测距的基本原理
相位法测距仪工作原理
3 相位法测距的基本原理
N·2π A’ D返
相位法测距的原理
2π
A
D往
B
3 相位法测距的基本原理
3.1 固定频率法
3.1.1 直接测尺频率方式