图像运动检测
初中物理运动图像专项检测题(带答案)
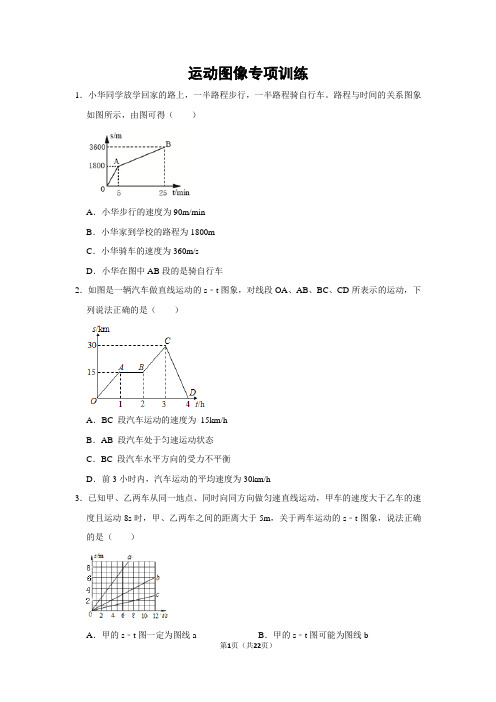
运动图像专项训练1.小华同学放学回家的路上,一半路程步行,一半路程骑自行车。
路程与时间的关系图象如图所示,由图可得()A.小华步行的速度为90m/minB.小华家到学校的路程为1800mC.小华骑车的速度为360m/sD.小华在图中AB段的是骑自行车2.如图是一辆汽车做直线运动的s﹣t图象,对线段OA、AB、BC、CD所表示的运动,下列说法正确的是()A.BC 段汽车运动的速度为15km/hB.AB 段汽车处于匀速运动状态C.BC 段汽车水平方向的受力不平衡D.前3小时内,汽车运动的平均速度为30km/h3.已知甲、乙两车从同一地点、同时向同方向做匀速直线运动,甲车的速度大于乙车的速度且运动8s时,甲、乙两车之间的距离大于5m,关于两车运动的s﹣t图象,说法正确的是()A.甲的s﹣t图一定为图线a B.甲的s﹣t图可能为图线bC.乙的s﹣t图可能为图线a D.乙的s﹣t图一定为图线c4.甲、乙两物体同时同地向东做直线运动,它们的s﹣t图象如图所示。
由图象可知()A.甲的速度小于乙的速度B.经过6s,甲在乙前面1.2m处C.以甲为参照物,乙向西运动D.甲和乙都做变速直线运动5.甲、乙两物体运动时,路程与时间关系的s﹣t图象如图所示,其中甲为曲线,乙为直线,在t=5秒时两线相交,则由图象可知()A.两物体在t=5秒时一定相遇B.两物体在5秒内通过的路程甲小于乙C.甲物体做曲线运动,乙物体做直线运动D.甲物体做变速运动,乙物体做匀速运动6.汽车在平直公路上匀速行驶,如图所示的汽车速度与时间关系的v﹣t图象中,正确()A.B.C.D.7.如下四个图象分别是甲、乙、丙、丁四个物体的运动图象。
其中,运动形式相同的物体是()A.甲和乙B.乙和丙C.丙和丁D.甲和丁8.如图是物体运动的速度与时间关系的图象,则该物体的路程与时间关系的图象应该是下图中的哪一个?()A.B.C.D.9.如图,图甲是小车甲运动的s﹣t图象,图乙是小车乙运动的v﹣t图象,由图象可知()A.甲车速度大于乙车速度B.甲、乙两车经过5s通过的路程都是10mC.甲、乙两车都以10m/s的速度匀速运动D.甲、乙两车都由静止开始运动10.如图,图甲是小车甲运动的s﹣t图象,图乙是小车乙运动的v﹣t图象,由图象可知()A.0~5s甲车匀速运动B.5s~6s甲车匀速运动C.0~5s乙车速度为2.0m/s D.5s~6s乙车静止11.甲、乙、丙三辆小车同时、同地向同一方向做匀速直线运动,它们运动的图象如图所示,分析图象可知()A.甲车的速度最快B.以甲车为参照物,则乙车向后运动C.以甲车为参照物,则丙车是静止的D.以乙车为参照物,则丙车是静止的12.如图所示,为A、B两物体从同一地点沿同一方向做直线运动的v﹣t图象。
运动模糊检测算法 -回复

运动模糊检测算法-回复运动模糊是指由于物体或相机移动引起的拍摄图像模糊现象。
在许多场景下,运动模糊都是一个严重的问题,因为它会导致图像失真,降低图像的质量和清晰度。
为了解决这个问题,许多运动模糊检测算法被提出并广泛应用于计算机视觉和图像处理领域。
本文将介绍一种常用的运动模糊检测算法,并详细探讨其原理和实现步骤。
第一步:定义运动模糊问题在开始讨论运动模糊检测算法之前,我们首先需要定义运动模糊的问题。
运动模糊通常发生在相机或拍摄物体移动的情况下。
当相机移动或物体快速移动时,图像中的像素会跟随移动轨迹,导致图像模糊。
因此,为了解决这个问题,我们需要确定图像中是否存在运动模糊,并找到合适的方法来评估和纠正这种模糊。
第二步:基于图像频谱的运动模糊检测算法为了检测运动模糊,我们可以利用图像频谱的特性。
运动模糊会导致图像频谱的高频成分减弱或消失,而低频成分增强。
因此,我们可以通过分析图像的频谱来检测运动模糊。
首先,我们需要将输入图像转换为频域表示。
这可以通过使用快速傅里叶变换(FFT)算法来实现。
然后,我们可以获取频谱图像,并可视化频谱图像。
在频谱图像中,我们可以观察到频谱的低频成分是否增强,高频成分是否减弱。
接下来,我们需要设置一个适当的阈值来检测运动模糊。
这可以通过比较频谱图像的低频成分和高频成分之间的差异来实现。
如果差异超过阈值,则可以判断图像存在运动模糊。
最后,我们可以通过应用逆快速傅里叶变换(IFFT)来恢复原始图像。
通过将频域表示转换回空域表示,我们可以减轻或甚至消除运动模糊。
第三步:运动模糊检测算法的实现基于图像频谱的运动模糊检测算法的实现主要分为以下几个步骤:1. 加载输入图像并将其转换为灰度图像。
2. 使用FFT算法将灰度图像转换为频域表示。
3. 获取频谱图像并进行可视化。
4. 计算频谱图像的低频和高频成分之间的差异。
5. 判断差异是否超过预设阈值,如果超过,则判断图像存在运动模糊。
6. 如果图像存在运动模糊,可以选择应用逆FFT来恢复原始图像。
基于序列图像的运动目标检测

t r s o d u o t al .Th c l r n f r t n o h u r n n a k r u d f me s c rid h e h l sa t ma i l c y es a et a so ma i ft e c re ta d b c g o n r o a s wa a r e
0 8 2 多 目标 达 到 0 6 5 尤其是 在 复杂 的动 态环 境 下 , 势 比较 明 显 。 .0 , .1, 优
关 键 词 : 号 处 理 ; 动 目标 检 测 ; 信 运 多分 辨 率 ; 自适 应 阈 值
中图 分 类 号 : TN2 6 TP 9 . 0 ; 3 14 文 献标 志码 : A d i1 . 7 8 J 2 1 3 . 5 2 0 o : 0 5 6 / AO 0 2 3 0 0 0 5
Ab ta t Aco dn o t ep o lmso u r u os sa dic mpeed tcin o vn beti sr c : c r ig t h rbe fn meo sn ie n o lt eet f n o mo igo jc n
d n mi n io me t ,ame h d f rmo ig t r e ee to s d o y a d- s ye mu t- r s l — y a ce vr n n s t o o vn a g td t ci n ba e n p r mi - t l li e o u to d lwa r p s d Th r a ft r e r b an d i o r s l to n h e al r n in mo e s p o o e . e a e so a g twe eo t i e n l w e o u i n a d t e d t iswe e i
图像运动模糊方向的检测方法

dr t nn e ei n f n d s dt hr o yi aer ao .T e aer t ao a et nfr e n - ic o e t b et e adaj t o znb g o t n hni g e o tncnb as m dt aoe ei d o d id i ue o i m t i m s ri r o o
Ab t a t o r d c o lxt f r so ain o l re ma e n mp o e c mp t g e ii n y moin b u r d sr c :T e u e c mpe i o e trt f b u r d i g s a d i r v o u n f ce c , y o i t lr e o
关键词 : 图像 恢 复 ; 糊 方 向 ; 别 ; 度 值 ; 条插 值 模 鉴 灰 样
中图分类号 : P 9 . T 3 14
文献标志码 : A
I e i c to fb u ie to f o o in l r e m a e d ntf a n o l r d r c in r m m to b u r d i g i i
0 引言
因摄影平 台的相对运 动而 导致 图像退 化 的现象 十分 普 遍, 比如汽车行驶时拍 照 , 拍摄 快速飞行 中的飞机 , 普通 照相 时人手的抖动等 。匀速运动、 加速运动 、 振动等各种运动都会
JANG a I u —i g I Hu ,L U G o qn ,CHE a —a g NG Xiog n
( oeefI om t nSi c n nier g a g U i rt Tcnl y af gJ n s 10 9 hn ) C lg n rai cneadE gnei ,N n nv syo eho g,N n n i gu20 0 ,C /a l o f o e n ei f o i a
视频图像中的运动人体检测和人脸识别

视频图像中的运动人体检测和人脸识别视频图像中的运动人体检测和人脸识别随着科技的发展和智能设备的普及,视频图像处理技术也日益发展。
视频图像中的运动人体检测和人脸识别技术,作为计算机视觉和图像处理领域的重要研究方向,已经在各个领域得到广泛应用,如安防领域、智能交通领域、人机交互等。
本文将对视频图像中的运动人体检测和人脸识别技术进行探讨。
一、视频图像中的运动人体检测技术运动人体检测技术是指识别视频图像中人体运动目标的过程。
在视频图像中,人体的运动是一个复杂而多变的过程,由于光照、环境、姿态等因素的干扰,运动人体检测技术面临着一定的挑战。
1、运动特征提取运动特征提取是运动人体检测的基础。
通过分析视频图像序列中的像素变化情况,可以提取出目标人体与背景的运动特征。
常用的运动特征包括:光流特征、运动轨迹特征、运动速度特征等。
光流特征是指在连续的图像帧之间,由像素的亮度变化引起的位移的矢量场。
通过计算相邻图像帧之间的像素差异,可以获得目标人体的光流特征。
运动轨迹特征是将目标人体在视频序列中的运动轨迹转化为特征向量,常用的运动轨迹特征包括:形状轨迹、颜色轨迹等。
运动速度特征则是指目标人体在视频序列中的运动速度信息。
通过分析目标人体在连续图像帧中的运动速度变化,可以提取出目标人体的运动速度特征。
2、运动目标检测在从视频图像中提取出运动特征之后,接下来就是运动目标检测的过程。
运动目标检测的目的是将目标人体与背景进行区分,通过运动模型、背景建模等方法,可以准确地检测出视频图像中的运动人体目标。
运动模型是一种基于物体运动的模型,通过对目标人体的运动模式进行建模,可以根据模型推测出目标人体的位置和运动状态。
背景建模则是通过对视频序列中的背景像素进行建模,通过对比当前帧图像与背景模型的差异,可以提取出目标人体。
3、运动人体跟踪基于运动的人体跟踪是指在视频图像中,根据目标人体的运动特征和运动目标检测结果,实时地跟踪目标人体的过程。
运动模糊检测算法 -回复
运动模糊检测算法-回复运动模糊检测算法是一种用于分析并检测图像中运动模糊的技术。
运动模糊是由于相机或者被拍摄对象的运动导致的图像模糊。
在许多场景中,如高速摄影、移动拍摄和低光条件下的摄影,运动模糊都是一个常见的问题。
通过运动模糊检测算法,我们能够在图像处理中更好地理解和处理运动模糊问题。
首先,我们需要了解运动模糊的成因。
当相机或者被拍摄对象在图像曝光的过程中发生运动时,由于这个相对运动,图像上的像素点会在传感器上产生模糊效果。
这导致了图像中的细节丢失,使得图像看起来模糊不清。
运动模糊的强度取决于运动的速度和图像曝光的时间。
为了检测运动模糊,我们需要利用图像中的信息来判断图像是否存在运动模糊。
下面是一个基本的运动模糊检测算法的步骤:1. 预处理:首先,我们需要对图像进行预处理。
这包括调整图像的亮度、对比度和颜色平衡。
预处理有助于提高图像的质量和减少噪声。
2. 运动分析:接下来,我们需要对图像进行运动分析。
这可以通过比较不同帧之间的像素值来实现。
如果某个像素点的像素值在不同帧中发生了较大的变化,那么可以判断这个像素点可能存在运动模糊。
3. 运动特征提取:针对存在运动模糊的像素点,我们可以提取一些特征来描述运动模糊的程度。
常见的特征包括像素点的运动方向和运动速度。
4. 运动模糊度量:通过运动特征,我们可以定义一个度量标准来量化运动模糊的程度。
这个度量标准可以是一个数值,用于表示图像中的运动模糊程度。
5. 模糊检测:最后,我们需要使用定义的运动模糊度量来判断图像中是否存在运动模糊。
如果度量值超过了一个预设的阈值,那么可以判断这个图像存在运动模糊。
需要注意的是,上述算法是一个基本的运动模糊检测算法,并不能应对所有的运动模糊情况。
在实际应用中,可能需要根据具体的需求和场景进行算法的优化和改进。
例如,可以利用机器学习或深度学习的方法来提高运动模糊检测的准确性和鲁棒性。
总之,运动模糊检测算法是图像处理中的一个重要技术。
运动目标检测方法
运动目标检测方法
运动目标检测是计算机视觉领域中的一个重要任务,旨在识别图像或视频中的运动目标并将其从背景中分割出来。
以下是几种常见的运动目标检测方法:
1. 基于背景差分的方法:该方法通过建立静态背景模型并通过计算当前帧与背景之间的差异来检测运动目标。
常见的背景差分算法有帧差法、高斯混合模型(GMM)法等。
2. 基于光流的方法:光流是描述图像中像素运动方向和速度的一种方法。
基于光流的运动目标检测方法通过计算两个相邻帧之间的光流场,并根据光流的一致性来检测运动目标。
常见的光流算法有Lucas-Kanade算法、Horn-Schunck 算法等。
3. 基于运动轨迹的方法:该方法通过跟踪目标的运动轨迹来检测运动目标。
常见的运动目标跟踪算法有卡尔曼滤波算法、粒子滤波算法等。
4. 基于深度学习的方法:近年来,深度学习技术在计算机视觉领域取得了显著的进展。
基于深度学习的运动目标检测方法通过使用深度学习模型,如卷积神经网络(CNN)或循环神经网络(RNN),来学习图像或视频中的运动目标特征,并进行目标检测。
5. 基于多目标跟踪的方法:运动目标检测通常是多目标跟踪的前置任务。
基于
多目标跟踪的方法可以通过结合目标检测和目标跟踪的技术,实现对连续帧中的多个目标进行准确的检测。
这些方法各有特点和适用领域,选择适合任务需求的方法能够提高运动目标检测的效果。
利用计算机视觉技术进行运动检测的步骤

利用计算机视觉技术进行运动检测的步骤随着计算机视觉技术的不断发展,运动检测成为其中重要的应用之一。
运动检测可以在视频中识别并跟踪运动的物体或人,对于安防监控、智能交通、虚拟现实和机器人等领域具有广泛的应用价值。
本文将介绍利用计算机视觉技术进行运动检测的主要步骤。
第一步:视频采集和预处理为了进行运动检测,首先需要从摄像机或其他视觉传感器中采集视频数据。
视频数据可以是实时采集的数据流,也可以是保存在文件中的离线视频。
在采集视频数据之后,对视频进行预处理是必要的。
预处理的目的是对图像进行增强、降噪和格式转换,以优化后续的图像分析过程。
常见的预处理操作包括图像平滑、灰度化、去噪和尺寸统一化等。
第二步:运动目标检测运动目标检测是运动检测的核心部分,其目标是从视频序列中准确地识别出运动的目标物体。
常用的运动目标检测方法包括基于像素差异的方法、基于光流的方法和基于背景建模的方法等。
基于像素差异的方法通过比较相邻帧之间的像素变化来检测运动目标。
基于光流的方法则利用计算物体像素位置随时间的变化来检测运动。
而基于背景建模的方法则通过建模背景图像来检测前景的变化。
在运动目标检测之后,可以对检测到的目标进行分类,识别出具体的类别。
第三步:运动目标跟踪在运动目标检测后,需要进行目标的跟踪,以便在视频序列中准确地追踪目标的位置和形状的变化。
跟踪可以基于目标的特征,比如颜色、纹理和形状等。
常用的运动目标跟踪方法包括基于相关滤波器的方法、基于卡尔曼滤波器的方法和基于粒子滤波器的方法等。
这些方法能够根据目标的运动模型和观测数据来估计目标的未来位置和状态。
第四步:运动目标分析和场景理解在运动检测和目标跟踪之后,可以对运动目标进行更深入的分析和理解。
这可以包括目标的行为分析、路径规划、姿态估计和多目标协同等。
运动目标分析和场景理解有助于进一步提取目标的语义信息,从而实现更高级的应用。
第五步:结果可视化和应用最后,运动检测的结果可以通过可视化的方式展示出来,以便用户更直观地理解和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
而在国内的研究机构中,中国科学院北京自动化研究所下属模式 识别图像重点实验室在监控领域位于领先的地位。在人的运动视觉监 控、交通场景视觉监控和行为模式识别等许多方面都进行了深入的研 究。此外,通过学习雷丁大学 VISEWS 的车辆交通建工系统的研究经 验。在理论的基础上,初步实现一个拥有自主知识产权的交通监控系 统 vstart。北京航空航天大学、上海大学等许多其他高校也对这方 面进行研究。华为也在视觉方面进行了大量的努力,并认为今后将是 图像的世界。
基于背景减除法的运动检测算法的学习
摘要
随着科技的日渐发展,智能机器和智能人工的发展也随之迅速发 展起来。许多繁琐复杂的工作将由智能机器人取而代之。智能自动化, 会带来生产力的提升,是机械现代化的新热点。然而大量的数据处理 将会是信息技术面临的首要问题。其中多媒体数据处理是当中的一部 分,图像处理占了很大的比例,因此,如何进行图像的自动处理成为 了一个重要问题。其中,目标运动检测是近些年的应用和理论的热点 研究,也是视觉科学界的重要分支。此领域的研究,对社会安全领域 有着重要的作用,他能将图像中感兴趣的运动目标与不感兴趣的静止 目标进行区分。如,远程无线婴幼儿监护,设备智能启动、自动触发 门禁等等,交通自动追踪。在运动检测算法中,背景减除法被广泛应 用,在本论文中,将对此方法进行学习研究,并应用于图像处理。 关键词:背景减除法 运动检测 智能机器人 数据处理
另一方面,对运动物体的检测后,我们还可以结合一些特征点识 别的方法,对运动物体进行跟踪,这也是运动检测的一个巨大的应用。 在安全领域,也有很大的意义。
综上所述,我们可以知道,三种方法各有优劣。背景减除法实现 简单,但当背景图像发生变换,此方法将失效。光流法性能强大,但 有三个限制条件。相邻帧法虽然克服了背景变化带来的影响,计算方 法也相对简单。但是其分割的运动对象区域不完整。我们需要在不同 的场合,选择合适的方法。
图.视频监控下的家里情况
第二章 方法介绍
背景减除法的基本概念: 背景模型背景减除法的关键,它是分割前景的基础,它主要研究
的问题如下: (1)背景扰动:背景中含有一些干扰的对象,比如树叶树枝的晃动, 但这些干扰的对象不能看作是运动目标; (2)模型背景的提取:最简单获取背景模型的方法是没有目标运动 场景的情况下进行,但有些时候无法满足这种要求,这是只能通过用 某些帧数的图像序列建立背景模型; (3)背景的更新:因为外界因素的变化可能会使图像背景发生变化, 所以要更新背景; (4)外界光线的变化:一天当中,不同的时间,不同天气的光线都 不同,所以会对检测的结果有影响。
Abstract
With the increasingly development of science and technology, intelligent machine and intelligent human development has been rapidly developed. Many of the complex work of intelligent robot instead. Intelligent automation, will bring productivity promotion, is a new hot spot machinery modernization. However, a large amount of data processing will be the top issue facing the information technology. Which is a part of multimedia data processing, image processing, account for a large proportion, therefore, how to carry out automatic processing of the image has become a important problem. Among them, the target motion detection is a hot topic in recent years the application and theory of research, is also a important branch of vision science. Research in the area, has a important role on social security, can he will be interested in moving targets in image and are not interested in stationary target. Such as remote wireless baby monitor, intelligent equipment start-up, automatic trigger entrance guard, etc., traffic automatic tracking. In motion detection algorithm, the background subtraction division is widely used, in this thesis, the method for the study, and applied to image processing.
灰度值差别较小时,则认为没有运动目标通过。在一定阔值范围内, 我们就可以把这个像素点看成背景素点。背景减除法根据模型的不同 可分为:平均值法、直面图法、Kalman 滤波器法,HMM 模型法、混合 高斯分布背景模型法等等。典型的背景减除法有:W4 模型、均值滤 波法、码书模型、隐马尔可夫模型等等。 1)W4 模型
③相邻帧差法 此方法类似于背景减除法,但是,此时减除的,不再 是背景图像,而是“前一副”采集图像。时间上很接近的两副图像, 其背景不会差别太大。因此,相邻帧进行相减后,将会提取出运动的 物体。然而,如果物体具有一定的大小,在做相邻帧的减法的时候, 我们只能获得运动物体边缘区域的信息。物体中间的区域,在相邻帧 运算的时候,无法被判断为运动区域。
常用的简单背景建模方式:先抽取一副图像的视频序列,或者 通过几幅图像平均值的计算来作为背景。他能提供比较完全的数据特 征,但如果场景是动态的,如对外来的干扰和光照十分敏感,所以大 部分研究人员都在着力于研究不同的背景模型,用来降低动态的背景 对分割运动的影响。
背景减除法是一种特殊的帧方法。它是利用帧图像和背景图像对 立像素点的灰度值来检测运动目标的。当当前的图像素点与背景图像 的像素点灰度值差别很大时,就认为有运动目标通过,反之,当两者
图.利用视频对车内外的监控
在国内国外,上班族的父母由于工作的需要无法长时间陪在宝 宝的身边,所以常常聘请保姆帮他们照看自己的孩子。而如今在网上 经常看到保姆虐待婴幼儿的丑闻。使得作为父母的他们很担心类似的 事情发生。所以视频监控起了很大的作用。只需一个摄像头和一部手 机就可以时刻观察家里的情况。从而可以是自己能放心的工作。所以 说运动检测给人们带来的方便、利益是非常可观的。
W4 模型是 Haritaoglu 等人提出的,他是将模型中的每个像素点 用 3 个值来描述,即最小值 MIN(x,y),最大值 MAX(x,y)和最大 邻间差分值 DMAX(x,y)。最大邻间差分值 DMAX(x,y)的意思是相邻两 帧的像素灰度差异最大值,这 3 个参数需要 L 帧背景来事先估计。当 有一帧新的图像输入时,将该图像的像素 X(x,y)与像素对立的 3 个值作比较,若满足下式:
接下来,我们先来介绍一些与运动检测的算法相关的背景知识。 1.1 背景知识介绍 背景减除法近 8 年来发展状况如下:
人类从外界环境捕捉的信息中。视觉信息所占比例最大。视频监 控应用于很多领域,尤其对于某些特定公众场合,比如:十字路口、 繁华商场、高速公路、银行、机场等等。自然界中的物体有动静之分, 在某些具体的应用中,人们对运动的物体比较感兴趣,在摄像头捕捉 到的图像中,人们只关心运动目标。例如在商场,某些特定的时间, 如半夜的时候不允许有物体经过某个区域,一旦捕捉到有物体经过就 会自动报警,类似的还有珠宝店以及对安保要求很高的其他场合。因 此在这些情况下就需要使用运动检测技术,便于自动对目标的分析、 监控对其行为,并做出准确判断。因此,如何充分有效的利用检测算
第一章 绪论
我们的日常生活中大量的信息来自图像,很多图像中的物体,实 际上是在运动的,通过相机,我们可以拍摄某个时刻的图像。但如果 我们使用摄像机,我们得到的其实是一组运动的图像。从这个角度出 发,我们非常需要进行运动的检测。通过运动的检测,我们可以实现 精密测量、家居安全、机器人自动运行等等方面的应用。因此,运动 检测也成为了当今的研究热点之一。
虽然其背景减除法对背景的要求很高,但是,在我们可以保证背 景变化不大的前提下,其计算方法简易,计算结果更为精确,非常适 合于本科设计过程中的学习。因此,我们在本论文中,将使用背景减 除法,检测运动的物体。
1.2 国内外研究现状
运动检测计算机视觉指的是用计算机来实现人的视觉功能,其研 究目标是使计算机具有一副或多幅图像认知周围环境的能力。作为视 觉的一个分支,就是对视场的目标,比如人或交通工具,进行实时的 观测。
法来检测目标极为关键,而所用的算法的性能将会直接影响到后续的 结果。因此建立一种好的检测算法至关重要。了解检测算法的检测效 果对算法本身有一定的指导意义,有助于在众多的检测算法中选择最 佳的算法。
根据需求的不同,应用到的检测算法也不同,不同的检测算法都 各有优劣。在这里,我们将介绍两种常用的方法。 ①背景减除法:当前大多数的摄像头都是固定在空间的某个位置。而 被监控的对象的背景通常不会发生变化。在这种情况下,可以使用背 景减除法对运动的物体进行检测。当监控的对象中的物体处于静止状 态时,前后两个很短的时间间隔内,拍摄的图像是几乎相同的。将这 两幅图像进行相减,得到的信息接近于 0。如此,可以判断图像中没 有物体运动。我们将没有外界物体进入,静止时刻的图像,作为背景。 在实际的工作中,当有外界物体进入时,拍摄的图像与静止图像有着 很大的区别,拍摄图像扣除背景图像后,将得到一个不为 0 的图像。 其中,数值剧烈变化的区域,就是运动物体所处的区域。 ②光流法 除了背景减除法外,还有光流法。光流法的应用有三个基 本使用条件:1. 环境的光照保持不变;2.物体是小运动;3.空间一 致,物体的相对位置于图像中的相位位置保持一致。光流的研究是利 用图像序列中的像素强度数据的时域变化和相关性来确定各自像素 位置的“运动”。其中一种主要的方法是微分法。通过时空的微分, 我们可以判断物体的运动方向。光流法不需要获取对象的背景特征, 在场景经常发生变化的情况下比较适用。