飞行时间法.
飞行时间计算PPT课件

• 第二步:换算GMT
• 广州=10:40-0800= GMT 02:40
• 巴黎=16:00-1.00= GMT15:00
• 第三步: 求差——飞行时间
• 15:00-2:40=12:20
第8页/共11页
课 堂 训 练3
---飞行时间的计算 某旅客乘飞机从香港去旧金山。8月20日启程, 时间是上午9:30的飞机,到达美国旧金山(西三区) 为当地时间8月20日13:30。计算该旅客的飞行时 间?
第4页/共11页
课 堂 训 练1
---飞行时间的计算 某旅客乘飞机从广州去新德里。9月21日启程,时间是晚上20:00的 飞机,到达新德里为当地时间9月21日20:00。计算该旅客的飞行时间?
第5页/共11页
课 堂 训 练1
---飞行时间的计算
某旅客乘飞机从广州去新德里。9月21日启程, 时间是晚上20:00的飞机,到达 新德里 为当地时
第10页/共11页
谢谢您的观看!
第11页/共11页
某旅客乘飞机从广州去巴黎。9月22日启程,时间是上午10:40的飞 机,到达法国巴黎(东一区)为当地时间9月22日16:00。计算该旅客的 飞行时间?
第7页/共11页
课 堂 训 练2
---飞行时间的计算
某旅客乘飞机从广州去巴黎。9月22 日启程,时间是上午10:40的飞机,到达法 国巴黎(东一区)为当地时间9月22日 16:00。计算该旅客的飞行时间?
第一步:找时区: 上海=GMT+0800 多伦多=GMT—3.30 第二步:换算GMT 上海=10:00-0800= GMT 02:00 多伦多=16:45+3.30= GMT20:15 第三步: 求差——飞行时间 20:15-2:00=18:15
斜抛运动飞行时间公式
斜抛运动飞行时间公式
斜抛运动是物理学中的一个经典问题,它描述了一个物体在斜向抛出后的运动状态。
在斜抛运动中,我们通常需要计算物体的飞行时间,以便预测它的落地位置。
飞行时间公式是计算斜抛运动飞行时间的数学公式。
它可以用来计算物体在斜向抛出后到达最高点和落地的时间。
一般来说,飞行时间公式可以表示为:
t = 2vsinθ/g
其中,t 表示飞行时间,v 表示物体的初速度,θ 表示物体的抛出角度,g 表示重力加速度。
这个公式的推导过程涉及到运动学的基本原理和向量分解的方法。
我们可以通过分析物体在水平和竖直方向上的运动状态,将物体的速度向量分解为两个分量,再分别计算它们在竖直方向上的运动,最终得出飞行时间公式。
需要注意的是,飞行时间公式只适用于物体在重力作用下做匀加速直线运动的情况。
如果物体在空气阻力等因素的影响下,其运动状态会变得更加复杂,需要采用其他方法进行分析和计算。
- 1 -。
光电检测ppt课件

2 丈量原理
2 丈量原理
直射式三角法:激光器发出的光垂直入射到被测物体外表 ,Scheimpflug 条件可表示为
待测外表与参考面的间隔x为
同理可计算出斜射式时x为
3 运用
1、逆向工程:
逆向工程是一种新的制造手段和系统,经过对已有样件或模型 的内外轮廓进展准确丈量,获得其三维数据,配合计算机软件系统 进展曲面重建,并在线精度分析、评价构造效果,重构CAD模型, 生成IGES或STL数据,或者生成数控加工NC代码,据此进展快速成 型或CNC数控加工,从而大大缩短产品或模具的开发制造周期。利 用光学三维丈量技术生成的虚拟模型可以实现快速呼应设计制造, 3D光学数字化系统与CAD/CAM/CAE以及RP&M集成可以构成基于 虚拟模型的快速呼应的设计和制造系统,主要优点包括:实践物体 的准确和完好的模型;提供原始CAD文件格式;曲面外型和参数实 体模型;在设计和制造中节省投入的时间和资金。
2 丈量原理
2、干涉法:
一束相关光,同过分光系统分成丈量光和参考光 ,利用丈量光波和参考光波的相关叠加来确定两束光 之间的相位差,从而获得物理外表的深度信息ΔZ(xy).
这种丈量方法丈量精度高,但丈量范围遭到光波 波长的限制,只能丈量围观外表的形貌和微小位移, 不适于宏观物体的检测。
2 丈量原理
被动三角法 数字摄影丈量技术
双目视觉
点光源法 点照明 1D线探测器 2D扫描
线光源法 线照明 2D线探测器 1D扫描
面光源法 面照明
2D线探测器 不需求扫描
莫尔轮廓 如:阴影莫尔
投射莫尔
序〔Gray 如:相位丈量轮廓术
〕
傅里叶变换轮廓术
编码序列
彩色编码技术 如:彩色多通道 编码实现相移
飞行时间质谱法对羊绒羊毛纤维蛋白的鉴别原理

飞行时间质谱法对羊绒羊毛纤维蛋白的鉴别原理作者:文天红来源:《广东蚕业》 2018年第4期摘要为了获取更多利益,一些不法分子在羊绒中掺入了羊毛,因此羊绒羊毛的检测需求量越来越大,检测方法也越来越多。
文章主要分析了飞行时间质谱法对羊绒羊毛纤维蛋白的鉴别原理,并进行了相关实验。
实验结果表明,羊绒区别于羊毛的肽段荷质比为2691.4,羊毛区别于羊绒的肽段荷质比为2664 5。
通过质谱网络数据库检索我们可以发现,这两种肽段的氨基酸排列顺序存在一个住点的差异,即在羊毛中是丝氨酸(s)的位置,在羊绒中则变成了天冬氨酰(N),我们可依据这一差异来鉴别羊绒和羊毛。
关键词蛋白质组学;质谱法;羊绒;羊毛;鉴别中图分类号:R447文献标识码:C文章编号:2095-1205(2018)04-28-02作为一种稀有的特种动物纤维,羊绒这一纺织原料具有舒适柔软、保暖性好的优良品质,因此其市场需求较大。
相较而言,羊绒的价格则低于羊绒很多,因此一些制造商将毛羊绒、剥鳞片后的羊毛、拉伸羊毛等掺杂进羊绒中,严重损害了消费者的利益,所以鉴别羊绒羊毛引发了社会各界的关注。
目前鉴别羊绒的方法有显微镜法。
DNA鉴别法、溶液法和质谱法,本文基于蛋白质组学的相关技术,应用飞行时间质谱技术进行羊绒羊毛的鉴别,以期为相关人员的工作提供参考。
1 蛋白质组学及飞行时间质谱技术1.1蛋白质组学蛋白质组学是一门阐明生命科学本质的学科,其是从整体水平上来认识蛋白质的存在及活动方式。
本实验鉴别羊绒就是基于羊绒蛋白质组学特征分析其蛋白质指纹图谱。
尽管DNA法鉴别羊绒纤维的准确度较高,但羊绒毛干中几乎不含核DNA,仅有很少量的线粒体DNA,而且存放时间较长也会使DNA出现降解的情况。
相反地,羊绒羊毛纤维中含有极高的蛋白质,提取简单容易。
基于蛋白质组学我们可得到羊绒与羊毛纤维的质谱谱图,进而对其特征谱峰的强度、质荷比进行对比,在质谱网络数据库进行检索即可得到两种纤维肽段的氨基酸序列差异。
脉冲飞行时间测量

摘要脉冲飞行时间测量法是脉冲激光测距的关键技术,它广泛运用于激光测距。
脉冲激光测距是通过测量激光脉冲发射信号(主波)和接收信号(回波)之间的时间间隔,就可以得知空间物体的距离。
主波和回波被光电探测器接收,再放大整形后,通过门电路,开启和关闭计数器,计数器对基准脉冲计数,计得的脉冲数目就代表所要测的飞行时间。
脉冲飞行时间的测量关键在于对回波信号的正确处理,其时间测量技术主要在于:采用时刻鉴别法判定计时点,时间间隔测量法测量主波和回波的时间间隔,模数转换技术提高测量精度、减小计时误差。
本文设计的时间测量电路由光电探测电路、放大电路、阈值电路、门电路、LED显示电路、单片机主控制电路构成。
各模块电路采用集成芯片,LED动态扫描显示,测时精度为1us。
关键词:单片机;脉冲激光测距;脉冲飞行时间;计数器;LED动态扫描ABSTRACTPulse flight time measurement method was the key technique that the pulse laser measured the distance, which was made use of in laser to measure to be apart from extensively. The pulse laser measuring the distance that passed to measure time interval between transmiting (main wave) and then receiving (reflection) , so the distance of the space object could be known. Both of main wave and reflecting wave were received by the photoelectric detector, then passed an electric circuit after enlarging again orthopedics to open and close to a count-machine , and a count-machine to count to the basis pulse, which was accounted of the pulse number which was the flight time. The key of the flight time measurement was the right processing of the reflecting wave, and its time measurement technique mainly lay in:Adopting time distinguishing judged to time point, time interval measurement measure between main wave and reflecting wave's interval, analog signals and digital signals conversion technique improved measuring accuracy and reduced the error of the measuring time. Time measurement circuit include the the photoelectric detecting circuit,enlarging circuit, the doorsill circuit,Logic circuit,LED circuit,Microcontroller active control circuit.Each mold circuit adopted integration chip, and the LED dynamic scan and manifestation, while measuring accuracy is 1us.Keyword:Microcontroller;The pulse laser measuring distance;the pulse flight time; the count-machine; the LED dynamic scan目录摘要 (I)ABSTRACT.................................................................................................................................... I I 第一章绪论 (1)第二章脉冲激光飞行时间测量的技术研究 (3)2.1 时间间隔测量方法 (3)2.2 时刻鉴别方法 (4)2.3 模数转换技术在时间测量中的应用 (6)第三章测量电路设计方案 (7)第四章飞行时间测量电路硬件设计 (10)4.1 光电探测器电路 (10)4.2 放大电路 (12)4.3 阈值电路 (13)4.4 门电路 (14)4.5 LED显示电路 (15)4.6 单片机主控制电路 (18)第五章飞行时间测量电路软件设计 (21)5.1 主程序流程设计 (21)5.2 计数模块 (23)5.3 中断服务程序 (24)5.4 动态显示 (25)参考文献 (27)致谢..................................................................................................... 错误!未定义书签。
物理实验技术中的飞行时间测量实验步骤与技巧

物理实验技术中的飞行时间测量实验步骤与技巧在物理学中,飞行时间测量是一种常用的实验方法,可以用于测量物体飞行速度、测距以及其他相关参数。
本文将介绍关于飞行时间测量实验的步骤和技巧,以帮助读者更好地进行实验。
1. 实验原理飞行时间测量实验是通过测量物体在一定距离内通过的时间来计算速度。
基本原理是先确定一个精确的距离,然后利用计时器测量物体通过这一距离所用的时间,再根据速度公式计算速度。
2. 实验步骤2.1 准备实验器材首先,准备实验所需的器材。
主要包括一台计时器,一条直线轨道,一个测距工具和一个物体。
2.2 设置实验装置将直线轨道平放在水平的桌面上,并确保轨道两端与桌面平齐。
用测距工具测量出一段固定的距离,并将其标记在轨道上。
2.3 调整实验参数根据实验需求,调整实验参数。
例如,可以调整轨道的倾斜角度,以改变物体的下滑速度。
可以调整计时器的设置,以获得更准确的实验结果。
2.4 进行实验开始实验前,确保轨道和计时器都已就位。
将物体放在轨道上,并轻轻推动物体,使其沿轨道向下滑动。
当物体通过轨道上的标记时,开始计时。
当物体到达轨道的终点时,停止计时。
2.5 计算结果根据测得的时间和之前测得的距离,利用速度公式计算物体的速度。
V = S / t,其中V为速度,S为距离,t为时间。
3. 技巧和注意事项3.1 实验器材的选择选择合适的实验器材非常重要。
计时器应具有高精度和高稳定性,以确保准确测量时间。
直线轨道应具有光滑的表面,以减小摩擦阻力。
测距工具应具有高度精确的刻度,以确保测得距离的准确性。
3.2 实验环境的控制在进行实验时,应确保实验环境的稳定性和一致性。
避免在有强光或风的环境下进行实验,以免对实验结果产生干扰。
实验过程中要注意室温的变化,因为温度变化可能会影响到实验结果。
3.3 数据处理和分析在实验结束后,进行数据处理和分析。
可以计算实验结果的平均值,以减小误差。
还可以根据实验结果绘制图表,以便更直观地观察实验数据的趋势和规律。
飞行时间的计算方
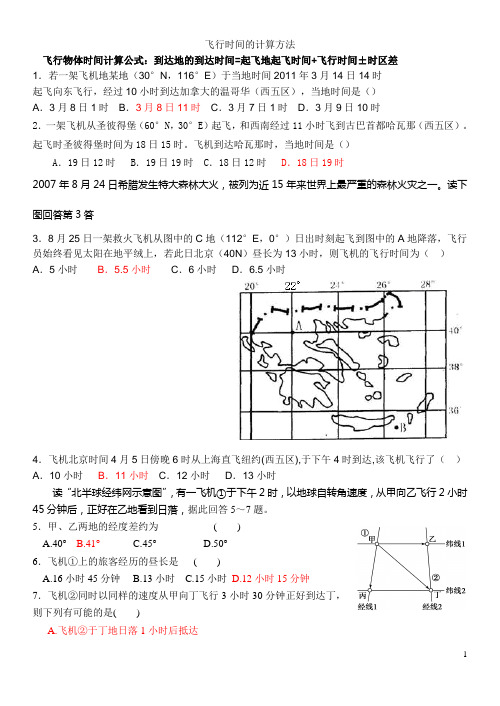
飞行时间的计算方法飞行物体时间计算公式:到达地的到达时间=起飞地起飞时间+飞行时间±时区差1.若一架飞机地某地(30°N,116°E)于当地时间2011年3月14日14时起飞向东飞行,经过10小时到达加拿大的温哥华(西五区),当地时间是()A.3月8日1时B.3月8日11时C.3月7日1时D.3月9日10时2.一架飞机从圣彼得堡(60°N,30°E)起飞,和西南经过11小时飞到古巴首都哈瓦那(西五区)。
起飞时圣彼得堡时间为18日15时。
飞机到达哈瓦那时,当地时间是()A.19日12时 B.19日19时 C.18日12时D.18日19时2007年8月24日希腊发生特大森林大火,被列为近15年来世界上最严重的森林火灾之一。
读下图回答第3答3.8月25日一架救火飞机从图中的C地(112°E,0°)日出时刻起飞到图中的A地降落,飞行员始终看见太阳在地平绒上,若此日北京(40N)昼长为13小时,则飞机的飞行时间为()A.5小时B.5.5小时C.6小时D.6.5小时4.飞机北京时间4月5日傍晚6时从上海直飞纽约(西五区),于下午4时到达,该飞机飞行了()A.10小时B.11小时C.12小时D.13小时读“北半球经纬网示意图”,有一飞机①于下午2时,以地球自转角速度,从甲向乙飞行2小时45分钟后,正好在乙地看到日落,据此回答5~7题。
5.甲、乙两地的经度差约为()A.40°B.41°C.45°D.50°6.飞机①上的旅客经历的昼长是()A.16小时45分钟B.13小时C.15小时D.12小时15分钟7.飞机②同时以同样的速度从甲向丁飞行3小时30分钟正好到达丁,则下列有可能的是()A.飞机②于丁地日落1小时后抵达B.飞机②上的旅客经历的昼长比飞机①上的长C.飞机②在丁地日落时正好抵达D.飞机②上的旅客经历的昼长时间一定比飞机①上的短3小时若下图中线段ac为40N纬线的一段a、c两地经度分别为0、100,一架飞机于当地时间某日5时30分从旭日东升的a机场起飞,沿纬线向东飞行,一路上阳光普照,降落到c机场正值日落,回答8~10题8.飞机从a机场到c机场的飞行时间约为()A.6时B.6小时20分C.6小时40分D.7时9.飞机降落到c机场时的当地时间是()A.18时30分B.18时50分C.19时30分D.19时50分10.若上图是某日某时刻40°N纬线的昼夜分布状况,a、c两地经度分别为15°E和165°E,abc为昼弧,该纬线其他部分地区夜弧。
tof 飞行时间法;时差法

tof 飞行时间法;时差法
飞行时间法
飞行时间法是一种测定物体运动距离的方法,它是根据物体的运动时间来计算运动距离的。
它的基本原理是:物体在一定时间内运动的距离等于它的速度乘以运动时间。
公式:s=v×t
其中,s表示物体运动的距离,v表示物体的速度,t表示物体
运动的时间。
应用:飞行时间法可以用来测量飞机、汽车等运动物体的运动距离。
例如,一架飞机从A地飞到B地,飞行时间为2小时,飞机的平均速度为500公里/小时,则飞机从A地飞到B地的
距离为:
s=v×t=500×2=1000公里
时差法
时差法是一种测定物体运动距离的方法,它是根据物体的运动时间差来计算运动距离的。
它的基本原理是:物体在一定时间内运动的距离等于它的速度乘以运动时间差。
公式:s=v×Δt
其中,s表示物体运动的距离,v表示物体的速度,Δt表示物
体运动的时间差。
应用:时差法可以用来测量飞机、汽车等运动物体的运动距离。
例如,一架飞机从A地飞到B地,飞行时间差为2小时,飞
机的平均速度为500公里/小时,则飞机从A地飞到B地的距
离为:
s=v×Δt=500×2=1000公里
总结:飞行时间法和时差法都是测定物体运动距离的方法,它们的基本原理都是:物体在一定时间内运动的距离等于它的速度乘以运动时间或时间差。
它们都可以用来测量飞机、汽车等运动物体的运动距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018/8/8
15
触发信号:门阀值法 矩形波法
2018/8/8
16
四 超声波TOF影响因素 及最新技术
温度上升,空气分子的密集程度就变化,而声波 传播速度与介质有关,试想下在水里和在空气中声波 传播速度的差异。介质物质分子越密集,声波传播速 度就越快,到真空中就没法传播了。 所以不同的实验环境,误差大小也不同。
2018/8/8
20Biblioteka 基于双向回波法的超声波飞行时间距离测量 系统由硬件平台和软件模块构成。硬件平台包括 进行声电信号转换的超声波探头、超声波发射电 路、超声波接收放大电路、带通滤波器、Arm控 制和AD采集;软件模块包括采集卡设置、采集 显示、数据处理等。 2018/8/8 21
最 新 技 术
2018/8/8
2018/8/8
18
最 新 技 术
2018/8/8
双向回波法是一种对测量系统的电路延迟进行标定 的方法,他能得到待测时间间隔的起点。超声波传感器 A与B面对面放置。假定A为发射头,其发射信号传播到 B端被接收。同时B将超声波反射后传到A被接收。图中 上方的波形为外部介质中传播的真实超声波信号,分别 为A刚发射的波形、传到B处的波形和返回至A端的波形。
飞行时间法
2018/8/8
1
飞行时间法
一 二 三
四
五
简介 应用 超声波TOF测距 超声波TOF影响因素及最新技术 TOF与三维图像成型
2018/8/8
2
一 简介
飞行时间测量法(Time Of Flight)通过 确定测量发射信号与接收信号的飞行时 间间隔来实现距离测量。因此被测距离 可表示为: s=v*t/2 s—待测距离; v-信号飞行速度; t—飞行时间;
22
最 新 技 术
2018/8/8 23
最 新 技 术
2018/8/8 24
五 TOF与三维图像成型
2018/8/8
25
五 TOF与三维图像成型
2018/8/8
26
五 TOF与三维图像成型
随着科技的发展,传感器技术会愈发敏感,新 的信息采集技术以及处理系统误差的方法也会被应 用,会大大提高图像的分辨率,包含更多的图像信 息。 TOF三维图像将来可以应用在3维扫描,电子沙 盘,城市街道规划等领域。个人认为可以研究TOF 3D扫描仪,并将3D扫描仪与3D打印机连接,将扫 描到的信息可以快速的转化为实际的模型。
2018/8/8
17
四 超声波TOF影响因素 及最新技术
时钟偏移问题 为了实现时钟同步,TOF测距方法采用了时钟偏移 量来解决时钟同步问题。但由于TOF测距方法的时间 依赖于本地和远程节点,测距精度容易受两端节点中 时钟偏移量的影响。为了减少此类错误的影响,采用 反向测量方法,即远程节点发送数据包,本地节点接 收数据包,并自动响应,通过平均在正向和反向所得 的平均值,减少对任何时钟偏移量的影响,从而减少 测距误差。
2018/8/8 8
二 应用
三维相机
2018/8/8
9
二 应用
测速仪: 雷达 激光 红 外线 声波等
2018/8/8
10
二 应用
警用的测速仪分固定和流动两种
2018/8/8
11
三 超声波TOF测距
超声波测距主要应用于倒车雷达、建筑施工工地以及一些 工业现场,例如:液位、井深、管道长度等场合。 超声波发生器的内部结构有两个压电晶片和一个共振板, 当它的两极外加上固有振荡频率的脉冲电压时压电晶片会发生 共振并产生超声波。如果共振板接收到超声波时,也会迫使压 电晶片产生振动,反过来将机械能转换为电信号,成为超声波 接收器。 在超声波测距电路中,发射端连续输出一系列脉冲 方波,然后判断接收端,实现超声测距一般有以下两种方 法: ① 读取输出端脉冲电压的平均值,该电压 (其幅值基本 固定 )与距离成正比,测量电压即可测得距离; ② 测量输出 脉冲的宽度,即发射超声波与接收超声波的时间间隔 t,故被 2018/8/8 12 测距离为 S=v*t/2。
19
最 新 技 术
为方便起见,将波形的峰值点作为发射和到达时刻,则 图中两波形间t0为超声波真实的传播时间。由于电路延 迟的影响,发出激励脉冲的起始时刻与发射时刻之间存 在固定电路延迟δ 1,B接收端接收到波形时刻与到达时 刻存在接收延迟σ1 ,A接收端存在接收延迟时间误差σ1. 以激励脉冲的起始时刻为时间零点。 则B端接收到波形的时刻为δ 1+t0+ σ2,A端接收到回波 的时刻为δ1+2t0+ σ1。两者差值∆t1=t0+ σ1- σ2 。 由于不同的接收板延迟存在差异, σ1-σ2 不一定为0.此 时,选B为发射端,上述方法二次测量,则A接收到波形 的时刻为δ 2+t0+ σ1,δ 2为发射延迟。B接收回波信号时 刻为δ 2+2t0+ σ2 。两者差值为∆t2=t0+ σ2-σ1。 两探头之间超声波真实的飞行时间t0=(∆t1+∆t2)/2 两探头接收延迟的差值为∆ σ12= σ1- σ2= (∆t1-∆t2)/2
2018/8/8 3
一 简介
s=v*t/2
2018/8/8 4
二 应用
飞行时间法质谱仪
2018/8/8
5
二 应用
倒车系统(激光、超声波等)
2018/8/8
6
二 应用
核物理领域
核碰撞的物理 研究
2018/8/8
7
二 应用
三维成像技术
采用TOF技术的相机,其发射器通过向 目标发出振幅经过调制的出射光信号, 再通过探测器接受到目标反射的入射光, 通过出射光与入射光的相位差可以计算 出飞行的时间,结合光速,算出相机到 目标的距离。摄像机上每个像素都接收 到相应的距离信号,得出三维图像。
2018/8/8
27
2018/8/8
28
超声波TOF测距系统 原理图
2018/8/8
13
四 超声波TOF影响因素 及最新技术
信号:调制信号的频率、波长、波形等 计时:计时器触发的方式、时钟偏移、计时器误差等 环境:温度、机械系统振动噪声、空气传播介质等 时钟偏移:是指时钟信号到达数字电路各个部分所 用时间的差异。
2018/8/8
14
超声波测距系统 几种常用的信号 脉冲