飞行时间法
UWB技术整理1

虽然UWB定位技术有上面的问题,但是UWB定位有着最大的优势, 精度。和WIFI定位、蓝牙定位这种用起来可有可无的技术相比,UWB定 位的精度直追激光定位。随着新的行业应用的不断的发掘,成本价格的不 断下降,UWB定位技术的真正爆发的时间也不会太迟。UWB技术和物联 网的结合、UWB技术在机器人上的使用、UWB技术在工业4.0上的应用最 终会让这种技术在位置需求这个根本性问题上找到它应有的坐标的。
距离:S=Cx[(Ta2-Ta1)-(Tb2-Tb1)](C为光速)。 但是单纯的TOF算法有一个比较严格的约束:发送设备和接收设备必须始终同步。这是一个比较棘 手的问题,但是一种Double-sided Two-way Ranging的算法巧妙的避开了这个问题,它即利用了TOF测 距的优良特点,同时又极大的去除了TOF的同步问题,从而为TOF的实用离 UWB定位的频段国内是有划分,但是频率过高,而且发射功率的要求
过于严格,是-40db。在很低的发射功率的情况下,对室外的定位肯定有影 响,所以距离就不能太远,一般是小于100米,这样对机场等大面积的地方 的覆盖就是个很大的问题。当然在室内定位的时候,这个问题基本是不存 在的。
UWB的定位原理
UWB定位原理(TOA) TOA,Time Of Arrival,通过测量被测标签(B)与已知位置基站(P1,P2,P3)间 的报文传输时间,计算出距离;采用三个以上的距离值,通过三角定位,计算 出被测标签的位置。不需要已知位置基站间时钟同步。
基站收到标签的多种信息;服务器根据上传的信息进行时钟分配;标签根据 分配的时间同基站进行测距定位。
装配分厂的功能需求
1.实时定位:电子地图显示人员分布,人员数量; 2.历史轨迹:输入人员信息,查看人员某段时间的历史轨迹,一天的走动距离 能够整体分析各人员的走动距离排名,为精益改善提供数据; 3.电子围栏:跨工位取料报警; 4.视频联动:自动调取相应位置人员的实时视频监控录像; 5.人员考勤:设定人员的工作时段,对人员工作的实际作业时间进行统计; 6.物资盘点:对贵重物资进行定位,并定时盘点,有异常进行报警; 7.叉车跟踪定位:对叉车的运行轨迹进行跟踪,实时定位叉车的位置。
飞行时间二次离子质谱法
飞行时间二次离子质谱法
飞行时间二次离子质谱法(Time-of-Flight Secondary Ion Mass Spectrometry,TOF-SIMS)是一种获得样品表面化学组成和结构信息的表面分析技术。
原理:
TOF-SIMS利用离子轰击样品表面产生次级离子,并测量这些次级离子的质荷比。
该技术使用高能的离子束轰击样品表面,导致样品表面原子和分子发生碰撞和电离。
由于样品中不同种类的化合物具有不同的质荷比,次级离子的质荷比可用来确定化合物的组成。
次级离子通过静电加速器加速,然后进入飞行时间荷质比谱仪进行质谱分析。
应用:
TOF-SIMS广泛应用于表面化学分析领域。
它可以用于研究样品的化学成分、分子结构和表面形貌等信息。
TOF-SIMS可用于解析无机和有机化合物,包括高分子材料、生物材料、涂层材料、颗粒和薄膜等。
该技术还可用于研究特定样品的元素分布、表面改性、腐蚀和附着等问题。
优势:
TOF-SIMS具有高灵敏度、高分辨率和高速度的优点。
它可以提供非破坏性的表面分析,无需特殊的样品准备,可以进行三维成像分析。
此外,TOF-SIMS还能够进行表面化学映射,以及对离子轰击过程进行实时监测和控制。
限制:
TOF-SIMS仍然存在一些限制。
由于离子轰击会引起样品表面的破坏和溅射,因此可能会造成分析结果的偏差。
另外,TOF-SIMS对于分析含有高盐度、水分或易挥发的样品具有一定的挑战性。
此外,TOF-SIMS的设备和操作成本较高,还需要专业的技术人员进行操作和数据解释。
脉冲飞行时间测量

摘要脉冲飞行时间测量法是脉冲激光测距的关键技术,它广泛运用于激光测距。
脉冲激光测距是通过测量激光脉冲发射信号(主波)和接收信号(回波)之间的时间间隔,就可以得知空间物体的距离。
主波和回波被光电探测器接收,再放大整形后,通过门电路,开启和关闭计数器,计数器对基准脉冲计数,计得的脉冲数目就代表所要测的飞行时间。
脉冲飞行时间的测量关键在于对回波信号的正确处理,其时间测量技术主要在于:采用时刻鉴别法判定计时点,时间间隔测量法测量主波和回波的时间间隔,模数转换技术提高测量精度、减小计时误差。
本文设计的时间测量电路由光电探测电路、放大电路、阈值电路、门电路、LED显示电路、单片机主控制电路构成。
各模块电路采用集成芯片,LED动态扫描显示,测时精度为1us。
关键词:单片机;脉冲激光测距;脉冲飞行时间;计数器;LED动态扫描ABSTRACTPulse flight time measurement method was the key technique that the pulse laser measured the distance, which was made use of in laser to measure to be apart from extensively. The pulse laser measuring the distance that passed to measure time interval between transmiting (main wave) and then receiving (reflection) , so the distance of the space object could be known. Both of main wave and reflecting wave were received by the photoelectric detector, then passed an electric circuit after enlarging again orthopedics to open and close to a count-machine , and a count-machine to count to the basis pulse, which was accounted of the pulse number which was the flight time. The key of the flight time measurement was the right processing of the reflecting wave, and its time measurement technique mainly lay in:Adopting time distinguishing judged to time point, time interval measurement measure between main wave and reflecting wave's interval, analog signals and digital signals conversion technique improved measuring accuracy and reduced the error of the measuring time. Time measurement circuit include the the photoelectric detecting circuit,enlarging circuit, the doorsill circuit,Logic circuit,LED circuit,Microcontroller active control circuit.Each mold circuit adopted integration chip, and the LED dynamic scan and manifestation, while measuring accuracy is 1us.Keyword:Microcontroller;The pulse laser measuring distance;the pulse flight time; the count-machine; the LED dynamic scan目录摘要 (I)ABSTRACT.................................................................................................................................... I I 第一章绪论 (1)第二章脉冲激光飞行时间测量的技术研究 (3)2.1 时间间隔测量方法 (3)2.2 时刻鉴别方法 (4)2.3 模数转换技术在时间测量中的应用 (6)第三章测量电路设计方案 (7)第四章飞行时间测量电路硬件设计 (10)4.1 光电探测器电路 (10)4.2 放大电路 (12)4.3 阈值电路 (13)4.4 门电路 (14)4.5 LED显示电路 (15)4.6 单片机主控制电路 (18)第五章飞行时间测量电路软件设计 (21)5.1 主程序流程设计 (21)5.2 计数模块 (23)5.3 中断服务程序 (24)5.4 动态显示 (25)参考文献 (27)致谢..................................................................................................... 错误!未定义书签。
飞行时间的计算方
飞行时间的计算方法飞行物体时间计算公式:到达地的到达时间=起飞地起飞时间+飞行时间±时区差1.若一架飞机地某地(30°N,116°E)于当地时间2011年3月14日14时起飞向东飞行,经过10小时到达加拿大的温哥华(西五区),当地时间是()A.3月8日1时B.3月8日11时C.3月7日1时D.3月9日10时2.一架飞机从圣彼得堡(60°N,30°E)起飞,和西南经过11小时飞到古巴首都哈瓦那(西五区)。
起飞时圣彼得堡时间为18日15时。
飞机到达哈瓦那时,当地时间是()A.19日12时 B.19日19时 C.18日12时D.18日19时2007年8月24日希腊发生特大森林大火,被列为近15年来世界上最严重的森林火灾之一。
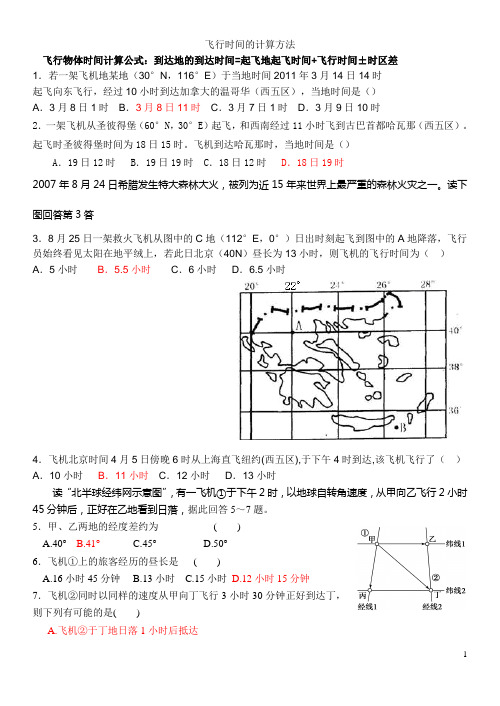
读下图回答第3答3.8月25日一架救火飞机从图中的C地(112°E,0°)日出时刻起飞到图中的A地降落,飞行员始终看见太阳在地平绒上,若此日北京(40N)昼长为13小时,则飞机的飞行时间为()A.5小时B.5.5小时C.6小时D.6.5小时4.飞机北京时间4月5日傍晚6时从上海直飞纽约(西五区),于下午4时到达,该飞机飞行了()A.10小时B.11小时C.12小时D.13小时读“北半球经纬网示意图”,有一飞机①于下午2时,以地球自转角速度,从甲向乙飞行2小时45分钟后,正好在乙地看到日落,据此回答5~7题。
5.甲、乙两地的经度差约为()A.40°B.41°C.45°D.50°6.飞机①上的旅客经历的昼长是()A.16小时45分钟B.13小时C.15小时D.12小时15分钟7.飞机②同时以同样的速度从甲向丁飞行3小时30分钟正好到达丁,则下列有可能的是()A.飞机②于丁地日落1小时后抵达B.飞机②上的旅客经历的昼长比飞机①上的长C.飞机②在丁地日落时正好抵达D.飞机②上的旅客经历的昼长时间一定比飞机①上的短3小时若下图中线段ac为40N纬线的一段a、c两地经度分别为0、100,一架飞机于当地时间某日5时30分从旭日东升的a机场起飞,沿纬线向东飞行,一路上阳光普照,降落到c机场正值日落,回答8~10题8.飞机从a机场到c机场的飞行时间约为()A.6时B.6小时20分C.6小时40分D.7时9.飞机降落到c机场时的当地时间是()A.18时30分B.18时50分C.19时30分D.19时50分10.若上图是某日某时刻40°N纬线的昼夜分布状况,a、c两地经度分别为15°E和165°E,abc为昼弧,该纬线其他部分地区夜弧。
tof 飞行时间法;时差法

tof 飞行时间法;时差法
飞行时间法
飞行时间法是一种测定物体运动距离的方法,它是根据物体的运动时间来计算运动距离的。
它的基本原理是:物体在一定时间内运动的距离等于它的速度乘以运动时间。
公式:s=v×t
其中,s表示物体运动的距离,v表示物体的速度,t表示物体
运动的时间。
应用:飞行时间法可以用来测量飞机、汽车等运动物体的运动距离。
例如,一架飞机从A地飞到B地,飞行时间为2小时,飞机的平均速度为500公里/小时,则飞机从A地飞到B地的
距离为:
s=v×t=500×2=1000公里
时差法
时差法是一种测定物体运动距离的方法,它是根据物体的运动时间差来计算运动距离的。
它的基本原理是:物体在一定时间内运动的距离等于它的速度乘以运动时间差。
公式:s=v×Δt
其中,s表示物体运动的距离,v表示物体的速度,Δt表示物
体运动的时间差。
应用:时差法可以用来测量飞机、汽车等运动物体的运动距离。
例如,一架飞机从A地飞到B地,飞行时间差为2小时,飞
机的平均速度为500公里/小时,则飞机从A地飞到B地的距
离为:
s=v×Δt=500×2=1000公里
总结:飞行时间法和时差法都是测定物体运动距离的方法,它们的基本原理都是:物体在一定时间内运动的距离等于它的速度乘以运动时间或时间差。
它们都可以用来测量飞机、汽车等运动物体的运动距离。
物理实验技术中的流体动力学测量与调节方法

物理实验技术中的流体动力学测量与调节方法引言:在物理实验中,流体动力学是一个重要的研究领域。
测量和调节流体动力学参数是确保实验结果准确的关键。
本文将介绍几种常用的流体动力学测量方法以及一些常见的调节方法,旨在帮助读者更好地理解和应用这些技术。
测量方法:1. 流体力学测量仪器流体力学测量仪器是测量流体动力学参数的重要工具。
常见的流体力学测量仪器包括压力传感器、流速计、雷诺数计算器等。
这些仪器能够准确测量流体的压力、流速和雷诺数等参数,为流体动力学研究提供基础数据。
2. 流速测量方法流速是流体动力学研究中的重要参数之一。
常用的流速测量方法有垂直管法、飞行时间法和热膨胀法等。
垂直管法通过测量液体在垂直管中下落的时间来计算流速。
飞行时间法则是利用声波在流体中的传播时间来测量流速。
热膨胀法利用流体的温度变化来计算流速。
这些方法适用于不同的实验条件和流体介质,可以根据实验需求选择合适的方法。
3. 流阻测量方法流阻是流体在流动过程中受到的阻力。
测量流体的流阻可以帮助我们了解其流动特性。
常用的流阻测量方法有渗透计法、维萨管法和普朗特计法等。
渗透计法通过测量流体通过渗透体的速度来计算流阻。
维萨管法则是利用维萨管的几何结构和流体的物理特性来计算流阻。
普朗特计法通过测量流体的流速和流体的密度来计算流阻。
这些方法可以帮助我们更好地了解流体的流动特性和阻力变化规律。
调节方法:1. 流量调节方法流量调节是控制流体进出系统的过程,常用的流量调节方法有阀门、调速器和喷嘴等。
阀门是最常见的流量调节设备,通过调节阀门的开度来改变流体的流量。
调速器则是通过调节转速来控制流量。
喷嘴利用流体的速度和压力差来控制流量,通过改变喷嘴的形状和尺寸来实现。
2. 压力调节方法压力调节是调节流体压力的过程,常用的压力调节方法有调压阀、自动控制阀和比例阀等。
调压阀是一种常用的压力调节设备,通过改变阀门的开度来调节流体的压力。
自动控制阀可以根据压力信号自动调节阀门的开度。
飞行时间二次离子质谱法

飞行时间二次离子质谱法飞行时间二次离子质谱法(ToF-SIMS)是一种高分辨表面分析技术,能够提供关于表面成分和化学状态的详细信息。
本文将介绍ToF-SIMS的原理、仪器配置、样品准备和应用领域。
ToF-SIMS的原理是利用离子轰击表面样品,将样品表面的原子和分子从样品中剥离出来,并通过电场加速离子,使离子在磁场中具有不同的质荷比,从而根据离子质荷比和飞行时间来确定分子质量和能量分布。
ToF-SIMS具有高灵敏度、高分辨率和大动态范围等优点。
ToF-SIMS仪器的主要组成部分包括离子源、离子飞行时间通道、离子检测器和数据处理系统。
离子源通常使用金属离子源或分子离子源,通过电子轰击、离子轰击或激光脱附等方式产生离子束。
离子飞行时间通道由加速器、飞行管道和制动器组成,用于控制离子飞行时间并测量飞行时间。
离子检测器通常使用微通道板(MCP)或多道光电倍增器(PMT)进行离子检测。
数据处理系统用于处理和分析离子质谱数据,并生成成像结果。
样品准备是ToF-SIMS分析中的关键步骤。
在准备样品之前,需要对样品进行真空处理,以去除大气中的杂质。
样品通常以固体、液体或气态形式存在。
固体样品通常需要进行切割、抛光和清洗等处理,以获得光滑的表面。
液体样品需要倒在样品台上,然后挥发溶剂以得到固态样品。
气态样品需要通过取样器进行直接气相分析。
ToF-SIMS在许多领域有广泛的应用。
在材料科学领域,ToF-SIMS 被用于表面和界面的分析,例如聚合物薄膜的组分分析和镀层厚度测量。
在生物医学领域,ToF-SIMS可用于研究生物膜的成分和生物分子的分布,例如细胞膜脂质组分分析和药物传递过程的研究。
在环境科学领域,ToF-SIMS可用于分析土壤、空气和水样品中的污染物,例如重金属元素和有机化合物。
总之,ToF-SIMS是一种强大的表面分析技术,可以提供关于表面成分和化学状态的详细信息。
它在材料科学、生物医学和环境科学等领域有广泛的应用前景。
飞行时间的计算方
飞行时间的计算方法飞行物体时间计算公式:到达地的到达时间=起飞地起飞时间+飞行时间±时区差1.若一架飞机地某地(30°N,116°E)于当地时间2011年3月14日14时起飞向东飞行,经过10小时到达加拿大的温哥华(西五区),当地时间是()A.3月8日1时B.3月8日11时C.3月7日1时D.3月9日10时2.一架飞机从圣彼得堡(60°N,30°E)起飞,和西南经过11小时飞到古巴首都哈瓦那(西五区)。
起飞时圣彼得堡时间为18日15时。
飞机到达哈瓦那时,当地时间是()A.19日12时 B.19日19时 C.18日12时D.18日19时2007年8月24日希腊发生特大森林大火,被列为近15年来世界上最严重的森林火灾之一。
读下图回答第3答3.8月25日一架救火飞机从图中的C地(112°E,0°)日出时刻起飞到图中的A地降落,飞行员始终看见太阳在地平绒上,若此日北京(40N)昼长为13小时,则飞机的飞行时间为()A.5小时B.5.5小时C.6小时D.6.5小时4.飞机北京时间4月5日傍晚6时从上海直飞纽约(西五区),于下午4时到达,该飞机飞行了()A.10小时B.11小时C.12小时D.13小时读“北半球经纬网示意图”,有一飞机①于下午2时,以地球自转角速度,从甲向乙飞行2小时45分钟后,正好在乙地看到日落,据此回答5~7题。
5.甲、乙两地的经度差约为()A.40°B.41°C.45°D.50°6.飞机①上的旅客经历的昼长是()A.16小时45分钟B.13小时C.15小时D.12小时15分钟7.飞机②同时以同样的速度从甲向丁飞行3小时30分钟正好到达丁,则下列有可能的是()A.飞机②于丁地日落1小时后抵达B.飞机②上的旅客经历的昼长比飞机①上的长C.飞机②在丁地日落时正好抵达D.飞机②上的旅客经历的昼长时间一定比飞机①上的短3小时若下图中线段ac为40N纬线的一段a、c两地经度分别为0、100,一架飞机于当地时间某日5时30分从旭日东升的a机场起飞,沿纬线向东飞行,一路上阳光普照,降落到c机场正值日落,回答8~10题8.飞机从a机场到c机场的飞行时间约为()A.6时B.6小时20分C.6小时40分D.7时9.飞机降落到c机场时的当地时间是()A.18时30分B.18时50分C.19时30分D.19时50分10.若上图是某日某时刻40°N纬线的昼夜分布状况,a、c两地经度分别为15°E和165°E,abc为昼弧,该纬线其他部分地区夜弧。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/3/30
14
超声波测距系统 几种常用的信号 脉冲
2020/3/30
15
触发信号:门阀值法 矩形波法
2020/3/30
16
四 超声波TOF影响因素 及最新技术
温度上升,空气分子的密集程度就变化,而声波 传播速度与介质有关,试想下在水里和在空气中声波 传播速度的差异。介质物质分子越密集,声波传播速 度就越快,到真空中就没法传播了。
由于不同的接收板延迟存在差异, σ1-σ2 不一定为0.此 时,选B为发射端,上述方法二次测量,则A接收到波形 的时刻为δ 2+t0+ σ1,δ 2为发射延迟。B接收回波信号时 刻为δ 2+2t0+ σ2 。两者差值为∆t2=t0+ σ2-σ1。
两探头之间超声波真实的飞行时间t0=(∆t1+∆t2)/2 两探头接收延迟的差值为∆ σ12= σ1- σ2= (∆t1-∆t2)/2
采用TOF技术的相机,其发射器通过向 目标发出振幅经过调制的出射光信号, 再通过探测器接受到目标反射的入射光, 通过出射光与入射光的相位差可以计算 出飞行的时间,结合光速,算出相机到 目标的距离。摄像机上每个像素都接收 到相应的距离信号,得出三维图像。
2020/3/30
8
二 应用
三维相机
2020/3/30
飞行时间法
2020/3/30
1
飞行时间法
一 简介 二 应用 三 超声波TOF测距 四 超声波TOF影响因素及最新技术 五 TOF与三维图像成型
2020/3/30
2
一 简介
飞行时间测量法(Time Of Flight)通过 确定测量发射信号与接收信号的飞行时 间间隔来实现距离测量。因此被测距离 可表示为:
2020/3/30
18
最 新 技 术
2020/3/30
双向回波法是一种对测量系统的电路延迟进行标定
的方法,他能得到待测时间间隔的起点。超声波传感器 A与B面对面放置。假定A为发射头,其发射信号传播到 B端被接收。同时B将超声波反射后传到A被接收。图中 上方的波形为外部介质中传播的真实超声波信号,分别 为A刚发射的波形、传到B处的波形和返回至A端的波形。
s=v*t/2
s—待测距离; v-信号飞行速度; t—飞行时间;
2020/3/30
3
一 简介
2020/3/30
s=v*t/2
4
二 应用
飞行时间法质谱仪
2020/3/30
5
二 应用
倒车系统(激光、超声波等)
2020/3/30
6
二 应用
核物理领域
核碰撞的物理 研究
2020/3/30
二 应用
三维成像技术
9
二 应用
测速仪: 雷达 激光 红
外线 声波等
2020/3/30
10
二 应用
警用的测速仪分固定和流动两种
2020/3/30
11
三 超声波TOF测距
超声波测距主要应用于倒车雷达、建筑施工工地以及一些 工业现场,例如:液位、井深、管道长度等场合。
超声波发生器的内部结构有两个压电晶片和一个共振板,
当它的两极外加上固有振荡频率的脉冲电压时压电晶片会发生
TOF三维图像将来可以应用在3维扫描,电子沙 盘,城市街道规划等领域。个人认为可以研究TOF 3D扫描仪,并将3D扫描仪与3D打印机连接,将扫 描到的信息可以快速的转化为实际的模型。
2020/3/30
27
2020/3/30
28
脉冲的宽度,即发射超声波与接收超声波的时间间隔 t,故被
2020/3/30
测距离为 S=v*t/2。
12
超声波TOF测距系统 原理图
2020/3/30
13
四 超声波TOF影响因素 及最新技术
信号:调制信号的频率、波长、波形等 计时:计时器触发的方式、时钟偏移、计时器误差等 环境:温度、机械系统振动噪声、空气传播介质等
2020/3/30
20
基于双向回波法的超声波飞行时间距离测量
系统由硬件平台和软件模块构成。硬件平台包括
进行声电信号转换的超声波探头、超声波发射电
路、超声波接收放大电路、带通滤波器、Arm控
制和AD采集;软件模块包括采集卡设置、采集
2020/3/30
显示、数据处理等。
21
最 新 技 术
2020/3/30
22
最 新 技 术
2020/3/30
23
最 新 技 术
2020/3/30
24
五 TOF与三维图像成型
2020/3/30
25
五 TOF与三维图像成型
2020/3/30
26
五 TOF与三维图像成型
随着科技的发展,传感器技术会愈发敏感,新 的信息采集技术以及处理系统误差的方法也会被应 用,会大大提高图像的分辨率,包含更多的图像信 息。
19
最 新 技 术
为方便起见,将波形的峰值点作为发射和到达时刻,则 图中两波形间t0为超声波真实的传播时间。由于电路延 迟的影响,发出激励脉冲的起始时刻与发射时刻之间存 在固定电路延迟δ 1,B接收端接收到波形时刻与到达时 刻存在接收延迟σ1 ,A接收端存在接收延迟时间误差σ1. 以激励脉冲的起始时刻为时间零点。 则B端接收到波形的时刻为δ 1+t0+ σ2,A端接收到回波 的时刻为δ1+2t0+ σ1。两者差值∆t1=t0+ σ1- σ2 。
共振并产生超声波。如果共振板接收到超声波时,也会迫使压
电晶片产生振动,反过来将机械能转换为电信号,成为超声波
接收器。 在超声波测距电路中,发射端连续输出一系列脉冲
方波,然后判断接收端,实现超声测距一般有以下两种方
法: ① 读取输出端脉冲电压的平均值,该电压 (其幅值基本
固定 )与距离成正比,测量电压即可测得距离; ② 测量输出
所以不同的实验环境,误差大小也不同。
2020/3/30
17
四 超声波TOF影响因素 及最新技术
时钟偏移问题 为了实现时钟同步,TOF测距方法采用了时钟偏移 量来解决时钟同步问题。但由于TOF测距方法的时间 依赖于本地和远程节点,测距精度容易受两端节点中 时钟偏移量的影响。为了减少此类错误的影响,采用 反向测量方法,即远程节点发送数据包,本地节点接 收数据包,并自动响应,通过平均在正向和反向所得 的平均值,减少对任何时钟偏移量的影响,从而减少 测距误差。