自动控制原理答案(第二版)+中国电力出版社
自动控制原理第二版课后答案孟华
自动控制原理第二版课后答案孟华【篇一:自动控制原理_孟华_习题答案】t>第二章2.1 试分别写出图2.68中各无源电路的输入ur(t)与输出uc(t)之间的微分方程。
图2.68 习题2.1图解:(a)ur?ucu?r?u?c)?i2,i1?i2?c?i1,c(ur1r2,r1r2rrr2?c?uc?12cu?r?cuurr1?r2r1?r2r1?r2(b)?r?u?c)?i1,c1(uur?u1?1,uc?i1r2?u1, ?i2,i1?i2?c2ur1??c?(r1c1?r1c2?r2c1)u?c?uc?r1r2c1c2u??r?(r1c1?r2c1)u?r?u r r1r2c1c2u(c)uur?uc?i1,c1(ur?u1)?i2,i1?i2?1r1r2,uc?1i1dt?u1, ?c2??c?(rc????r1r2c1c2u12?r2c2?r2c1)uc?uc?r1r2c1c2ur?(r2c2?r2c1)ur?ur2.2 试证明图2.69(a)所示电路与图2.69(b)所示的机械系统具有相同的微分方程。
图2.69(b)中xr(t)为输入,xc(t)为输出,均是位移量。
(a)(b)图2.69 习题2.2图(a)1ur?uc?r?u?c)?i2,i1?i2?i,uc??i1,c1(uidt?ir2,r1c2???c?(r1c1?r1c2?r2c2)u?c?uc?r1r2c1c2u??r?(r1c1?r2c2)u?r?u r r1r2c1c2u(b)?c?x?1)?k2x1,b1(x?r?x?c)?k1(xr?xc)?b2(x?c?x?1), b2(xb1b2bbbbbbb??c?(1?2?2)x?c?xc?12??r?(1?2)x?r?xrxxk1k2k1k2k1k1k2k1k22.3 试分别求出图2.70中各有源电路的输入ur(t)与输出uc(t)之间的微分方程。
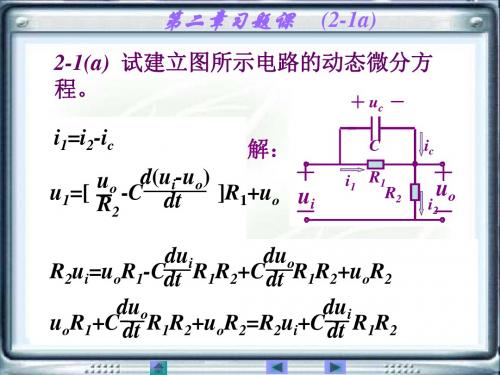
(a) (b)(c)图2.70 习题2.3图解:(a)uur?r??c?cur1r2,uc?r???r2cur2ur r1(b)uurr?c,r2cu?c?uc??2ur ??c?cur1r2r1uc??ur1u?c??r2cu?r?ur r2??rdt,r1cur1cr1(c)2.4 某弹簧的力-位移特性曲线如图2.71所示。
自动控制原理与应用答案解析第二版_课后答案解析
第二章习题课 (2-11d)
2-11d 求系统的闭环传递函数 。
解: (1)
R(s) G1 + G2
C(s)
_
HG2
R(s)
_
C(s) G1 + G2
L1 H
C(s) R(s)
= (G1+G2
)
1 1+G2H
(2) L1=-G2H P1=G1 Δ1 =1
P2=G2 Δ2 =1
第二章习题课 (2-11e)
C(s)=
(s2+4s+2) (s+1)(s+2)
=1+
2 s+2
-
1 s+1
c(t)=δ (t)+2e-2t+e-t
第二章习题课 (2-10)
2式R-1(,s0) 试已- R画知(sG出)系1 -系统统G1的+2的G微G3G动1分G2G-2态G6方+3G结GG程-432GG构组46G图G5的3C并拉(s求)氏G传4变C递(s换) RC((函解ss))R=数:(s1)。+CRG- ((ss3)GX)X[GGX112(7(-1GX2(ssXs())3)s6=(=1--)s(G+GR{=s)=)R81GG((GGsGs(C2))3s236(]GG)G((s-ssG)1CG)4)1[[(XX=G2GXXsC7(3-)2Gs2((1G(5--2()ss(sGs+4G[))s8))(GG-)G1s-C3-15()7-GG(Gs(X+(1ss)GsGG)6)64[3)GG(3G(-3sG2sGG55G)G7)(4X2s(G8GG3GGG)s3(X3])5s7G86(573-)s(GC]s)4})]((8GsGG(s)14)7(C]s-C)(Gs(s)8))
自动控制原理第二版课后答案
自动控制原理第二版课后答案1. 介绍。
自动控制原理是现代自动化领域中的重要基础课程,它涉及到控制系统的设计、分析和应用,对于工程技术人员来说具有重要的意义。
本文档将针对自动控制原理第二版课后习题进行详细解答,帮助学习者更好地掌握课程内容。
2. 第一章。
2.1 课后习题1。
答,根据控制系统的基本结构,可以将其分为开环控制系统和闭环控制系统。
开环控制系统中,控制器的输出不受到被控对象的影响,而闭环控制系统中,控制器的输出受到被控对象的影响。
闭环控制系统具有更好的稳定性和鲁棒性,但也更加复杂。
2.2 课后习题2。
答,传递函数是描述控制系统输入和输出之间关系的数学模型,其形式为输出变量的拉普拉斯变换除以输入变量的拉普拉斯变换。
传递函数可以帮助我们分析控制系统的性能和稳定性,并进行控制器的设计。
3. 第二章。
3.1 课后习题1。
答,稳定性是控制系统设计中需要考虑的重要因素,它决定了系统在受到干扰或参数变化时的表现。
稳定性分析可以通过判据、根轨迹和频域等方法进行,其中判据法是最为直观和简单的方法,通过对系统的特征方程进行判别来判断系统的稳定性。
3.2 课后习题2。
答,根轨迹是一种描述控制系统特征方程根在复平面上运动规律的方法,它可以直观地反映系统的稳定性、过渡过程和静态误差等性能指标。
通过对根轨迹的分析,可以帮助我们设计合适的控制器来满足系统性能指标的要求。
4. 第三章。
4.1 课后习题1。
答,比例控制器是一种简单的控制器,它的输出与系统的误差成正比。
比例控制器可以改善系统的静态误差性能,但无法消除系统的稳定性问题和过渡过程中的振荡。
4.2 课后习题2。
答,积分控制器是一种消除系统静态误差的控制器,它的输出与系统的误差积分成正比。
积分控制器可以有效地消除系统的静态误差,但在实际应用中可能会导致系统的过度调节和振荡。
5. 总结。
通过对自动控制原理第二版课后习题的详细解答,我们可以更好地理解控制系统的基本原理和设计方法。
自动控制原理答案完全版_第二版
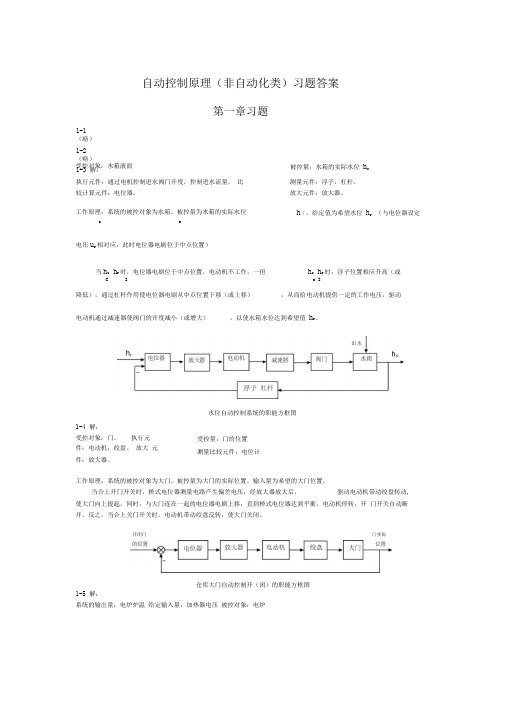
自动控制原理(非自动化类)习题答案第一章习题被控量:水箱的实际水位 h c执行元件:通过电机控制进水阀门开度,控制进水流量。
比较计算元件:电位器。
h 「。
给定值为希望水位 h r (与电位器设定cr电压u r 相对应,此时电位器电刷位于中点位置)当h c h r 时,电位器电刷位于中点位置,电动机不工作。
一但h c h r 时,浮子位置相应升高(或CIc I降低),通过杠杆作用使电位器电刷从中点位置下移(或上移) ,从而给电动机提供一定的工作电压,驱动电动机通过减速器使阀门的开度减小(或增大),以使水箱水位达到希望值 h r 。
水位自动控制系统的职能方框图受控量:门的位置 测量比较元件:电位计工作原理:系统的被控对象为大门。
被控量为大门的实际位置。
输入量为希望的大门位置。
当合上开门开关时,桥式电位器测量电路产生偏差电压,经放大器放大后,驱动电动机带动绞盘转动,使大门向上提起。
同时,与大门连在一起的电位器电刷上移,直到桥式电位器达到平衡,电动机停转,开 门开关自动断开。
反之,当合上关门开关时,电动机带动绞盘反转,使大门关闭。
1-5 解:系统的输岀量:电炉炉温 给定输入量:加热器电压 被控对象:电炉1-1 (略) 1-2(略)1-3 解: 受控对象:水箱液面 测量元件:浮子,杠杆。
放大元件:放大器。
工作原理:系统的被控对象为水箱。
被控量为水箱的实际水位1-4 解:受控对象:门。
执行元件:电动机,绞盘。
放大 元件:放大器。
开闭门门实际仓库大门自动控制开(闭)的职能方框图放大元件:电压放大器,功率放大器,减速器比较元件:电位计测量元件:热电偶职能方框图:KK3 2 Ts (T 1)s s K1K 3电位器电压放大炉温热电偶第二章习题2-1解:对微分方程做拉氏变换:X,(s) R(s) C(s) N,(s)X 2 (s) Q X/s)X 3 (s) X2 (s) X5(s TsX4 (s) X 3 (s)X5 (s) X4 (s) K2 N2(s k 3 X5 (s) s2C (s) sC(s) C(s) / R(s) 功率放大加热器'电机电炉R(s)绘制上式各子方程的方块图如下图所示:C(s) / N i (s) C(s) / R(s),K 2K 3TSTs 3~~T 1)s 2s K 1K 32-2解:对微分方程做拉氏变换X i (s) K[R(s) C (s)] X 2 (s)sR(s)(s 1) X 3(s) X i (s) X 2 (s) (Ts 1)X 4 (s)X 3 (s) X 5 (s)C(s) X 4 (s) N (s) X 5 (s) (Ts 1) N(s)(b) C (s)字红R(s) 1 G 1G 3 G G 4 G 2 G 3 G 2G 4X3(s) 绘制上式各子方程的方块如下图:将方块图连接得出系统的动态结构图:..R(s)1(s 1):Ts 1)C(s)N (s) 02-3解:(过程略)K____________C(s) (s 1)<Js 1) (s 1XTs 1) K ____________ Ts 2(T s1)s (K 1)C(s) / N 2 (s)R(s) ms fs K(c)誤 R(s) G 2 G 1G 2 1 G-i G 2G-I (d 普 R(s)G 1 G 2 1 G 2G 3(e)R^ R(s)G 1G 2G 3G 4 1 G<|G 2 G 2G 3 G 3G 4 G 1G 2G 3G 4 2-4 解:(1)求 C/R ,令 N=0 KK K 3s(Ts 1) C (s) / R(s) G(s)1 G(s) 求C/N ,令R=0,向后移动单位反馈的比较点 K C(s) / N (s) (K n G n K 1 0 ) — J s 1 亠 K 1G(s)K 1K 2 K 3 Ts 2K i K 2 K 3K n K 3s K 1K 2 K 3G K 2 n2 一Ts 2s K 1K 2 K 3 Ts 1 s (2)要消除干扰对系统的影响C(s) / N (s) K n K3s K1K2 K3GnTs 2 s K 1K 2 K 3G n (s) KnsK 1K 22-5 解:(a ) (1 )系统的反馈回路有三个,所以有3L a L 1 L 2 L 3 a 1G 1G 2G 5 G 2G 3G 4 G 4G 2G 5三个回路两两接触,可得 1 L a 1 GG 2G 5 G 2G 3G 4 G 4G 2G 5(2) 有两条前向通道,且与两条回路均有接触,所以P P 2 G 1G 2G 3,11, 2 1(3) 闭环传递函数C/R 为GGG 3 11 G 1G 2G 5 G 2G 3G 4 G 4G 2G 5(b)(1) 系统的反馈回路有三个,所以有3L aa 1L 1L 3 G 1G 2 G 1 G 1三个回路均接触,可得 1 L a 1 G-i G 2 2G-)(2 )有四条前向通道,且与三条回路均有接触,所以R G 1G 2 , 11P 2G, 21PG2,3 1P 4G 1,41(3)闭环传递函数C/R 为C G 1G 2 G 1 G 2 GG-i G 2 G 2 R 1 G 1G 22G 1 1 G-|G 2 2G.2-6解:用梅逊公式求,有两个回路,且接触,可得1L a 1 GG 2G 3 G 2,可得第三章习题采用K 0 , K H 负反馈方法的闭环传递函数为1OK o要使过渡时间减小到原来的 0.1倍,要保证总的放大系数不变,则:(原放大系数为10,时间常数为0.2)3-2解:系统为欠阻尼二阶系统(书上改为“单位负反馈……”,“已知系统开环传递函数”)% e / 1 $100%100% 1C(s) G-|G 2G 3 G 2G 3 R(s) 1 G 1G 2G 3 G 2 C (s)(1 G 2 )G 3N 2 (s) 1 GG 2G 3 G 2 E(s) 1 G 2 G 2G 3 R(s) 1 G-|G 2G :3 G 2 E(s) C(s) (1 G 2 G N 2 (s)N 2 (s)1 G 1G 2G 3 G 2C (s) NQC(s) / R(s)C(s) 1 (1 GG 2G 3 G 2 ) 1N 3 (s) 1 G 1G 2G 3 G 2 E(s) C(s) G 2G 3 G 1G 2G 3 N 1 (s) N 1(s) 1 G 1G 2G 3 G 2E(s)C(s) 1N 3 (s)N 3 (s)3-1解:(原书改为G(s) 100.2s 1)(s)C(s) K G(s) R(s) 01 G(S )K H1 10K H 0.2s1 10K10K 。
自动控制原理答案_第二版(孟庆明)讲解

课后答案网,用心为你服务!大学答案--- 中学答案--- 考研答案--- 考试答案最全最多的课后习题参考答案,尽在课后答案网()!Khdaw团队一直秉承用心为大家服务的宗旨,以关注学生的学习生活为出发点,旨在为广大学生朋友的自主学习提供一个分享和交流的平台。
爱校园()课后答案网()淘答案()自动控制原理(非自动化类)习题答案第一章 习题1-1(略) 1-2(略) 1-3 解:受控对象:水箱液面。
被控量:水箱的实际水位 h c 执行元件:通过电机控制进水阀门开度,控制进水流量。
比较计算元件:电位器。
测量元件:浮子,杠杆。
放大元件:放大器。
工作原理:系统的被控对象为水箱。
被控量为水箱的实际水位 h 。
给定值为希望水位 h (与电位器设定 c r 电压 u r 相对应,此时电位器电刷位于中点位置)。
当 h c = h r 时,电位器电刷位于中点位置,电动机不工作。
一但 h c ⎺ h r 时,浮子位置相应升高(或降低),通过杠杆作用使电位器电刷从中点位置下移(或上移),从而给电动机提供一定的工作电压,驱动 电动机通过减速器使阀门的开度减小(或增大),以使水箱水位达到希望值 h r 。
水位自动控制系统的职能方框图1-4 解:受控对象:门。
执行元件:电动机,绞盘。
放大元件:放大器。
受控量:门的位置 测量比较元件:电位计工作原理:系统的被控对象为大门。
被控量为大门的实际位置。
输入量为希望的大门位置。
当合上开门开关时,桥式电位器测量电路产生偏差电压,经放大器放大后,驱动电动机带动绞盘转动, 使大门向上提起。
同时,与大门连在一起的电位器电刷上移,直到桥式电位器达到平衡,电动机停转,开 门开关自动断开。
反之,当合上关门开关时,电动机带动绞盘反转,使大门关闭。
开(闭)门门实际 仓库大门自动控制开(闭)的职能方框图1-5 解:系统的输出量:电炉炉温 给定输入量:加热器电压 被控对象:电炉放大元件:电压放大器,功率放大器,减速器 比较元件:电位计 测量元件:热电偶 职能方框图:第二章 习题2-1 解:对微分方程做拉氏变换:♣ X 1 (s ) = R (s ) C (s ) + N 1 (s ) ♠ ♠ X 2(s ) = K 1 X 1 (s )♠ X 3 (s ) = X 2 (s ) X 5 (s )♦ ♠TsX 4 (s ) = X 3 (s )♠ X 5 (s ) = X 4 (s ) K 2 N 2 (s )♠ ♠K X (s ) = s 2C (s ) + sC (s ) ♥3 5 绘制上式各子方程的方块图如下图所示:1(s)3(s)5(s)K 1K 3C (s ) / R (s ) = , Ts 3 + (T + 1)s 2+ s + K K 1 3C (s ) / N 1 (s ) = C (s ) / R (s ) ,K 2 K 3Ts C (s ) / N (s ) = 2Ts 3 + (T + 1)s 2 + s + K K 1 32-2 解:对微分方程做拉氏变换♣ X 1 (s ) = K [R (s ) C (s )] ♠♠ X 2 (s ) = ⎜ sR (s )♠(s + 1) X 3 (s ) = X 1 (s ) + X 2 (s )♦♠(Ts + 1) X 4 (s ) = X 3 (s ) + X 5 (s ) ♠C (s ) = X (s ) N (s ) 4 ♠ ♠♥ X 5 (s ) = (Ts + 1) N (s )绘制上式各子方程的方块如下图:⎜ s K+ K + ⎜ s = (s + 1)(Ts + 1) (s + 1)(Ts + 1) = C (s ) R (s ) k Ts 2+ (T + 1)s + (K + 1) 1 + (s + 1)(Ts + 1)C (s ) N (s ) =2-3 解:(过程略) C (s ) 1 C (s ) =G 1 + G 2 (a)= R (s ) ms 2+ fs + K(b)R (s ) 1 + G G G G + G G G G 1 3 1 4 2 3 2 4C (s ) =G 2 + G 1G 2C (s ) = G 1G 2 (c)(d)R (s ) 1 + G 1 + G 2G 1R (s ) 1 G 2G 3C (s ) =G 1G 2G 3G 4 (e)R (s ) 1 + G 1G 2 + G 2G 3 + G 3G 4 + G 1G 2G 3G 42-4 解 :(1)求 C/R ,令 N=0G (s ) = K 1K 2 K3s (Ts + 1)K 1K 2 K 3 G (s )C (s ) / R (s ) = = 1 + G (s ) Ts 2 + s + K K K 1 2 3求 C/N ,令 R=0,向后移动单位反馈的比较点K 3K 2 ) Ts + 1 = K n K 3s K 1K 2 K 3G n C (s ) / N (s ) = (K G K n n 1K K Ts 2 + s + K K K s 1 + 3 2K 1 2 3 1 Ts + 1 s(2)要消除干扰对系统的影响C (s ) / N (s ) = K n K 3 s K 1K 2 K 3G n= 0Ts 2 + s + K K K 1 2 3K n sG (s ) = nK 1K 22-5 解:(a )(1)系统的反馈回路有三个,所以有3La= L 1 + L 2 + L 3 = G 1G 2G 5 G 2G 3G 4 + G 4G 2G 5a =1三个回路两两接触,可得 ⊗ = 1La= 1 + G 1G 2G 5 + G 2G 3G 4 G 4G 2G 5(2)有两条前向通道,且与两条回路均有接触,所以P 1 = G 1G 2G 3 , ⊗1 = 1 P 2 = 1, ⊗2 = 1(3)闭环传递函数 C/R 为C =G 1G 2G 3 + 1 R 1 + G 1G 2G 5 + G 2G 3G 4 G 4G 2G 5(b )(1)系统的反馈回路有三个,所以有3La= L 1 + L 2 + L 3 = G 1G 2 G 1 G 1a =1三个回路均接触,可得 ⊗ = 1La= 1 + G 1G 2 + 2G 1(2)有四条前向通道,且与三条回路均有接触,所以P 1 = G 1G 2 , ⊗1 = 1 P 2 = G 1 , ⊗2 = 1 P 3 = G 2 , ⊗3 = 1 P 4 = G 1 , ⊗4 = 1(3)闭环传递函数 C/R 为C = G 1G 2 + G 1 + G 2 G 1 = G 1G 2 + G 2 R 1 + G 1G 2 + 2G 1 1 + G 1G 2 + 2G 12-6 解:用梅逊公式求,有两个回路,且接触,可得 ⊗ = 1La= 1 + G 1G 2G 3 + G 2 ,可得C (s ) = G 1G 2G 3+ G 2G 3 C (s ) = C (s ) / R (s )R (s ) 1 + G 1G 2G 3 + G 2 N 1 (s )(1 + G 2 )G 3C(s ) = 1⋅ (1 + G 1G 2G 3 + G 2 )= 1C(s ) = N 2 (s ) 1 + G 1G 2G 3 + G 2 1 + G 1G 2G 3 + G 2 N 3 (s )E (s ) =1 + G2 G 2G3 E (s )= C (s ) = G 2G 3 G 1G 2G 3 R (s ) 1 + G 1G 2G 3 + G 2N 1 (s ) N 1 (s ) 1 + G 1G 2G 3 + G 2 E(s ) = C (s ) (1 + G 2 )G 3E (s ) = C (s )= = 1 N 2 (s ) N 2 (s ) 1 + G 1G 2G 3 + G 2 N 3 (s ) N 3 (s )第三章 习题103-1 解:(原书改为 G (s ) =)0.2s + 1采用 K 0 , K H 负反馈方法的闭环传递函数为10K 0⎫ (s ) = C (s ) = K G (s )1 + 10K H = R (s ) 01 + G (s )K 0.2 s + 1H 1 + 10K H要使过渡时间减小到原来的 0.1 倍,要保证总的放大系数不变,则:(原放大系数为 10,时 间常数为 0.2)10K 0♣ = 10 ♣ K = 10 ♠0 ♦1 + 10K ® ♦ H♥K = 0.9♠ H 1 + 10K = 10 ♥H 3-2 解:系统为欠阻尼二阶系统(书上改为“单位负反馈……”,“已知系统开环传递函数”)⎛ % = e⎩⋅100% = 1.3 1 ⋅100%1t p == 0.1解得:⎤n = 33.71 ⎩ = 0.358所以,开环传递函数为:1136 47.1G (s ) = = s (s + 24.1) s (0.041s + 1)3-3 解:(1) K = 10s 1时:100G (s ) = s 2+ 10s⎤ 2 =100 n 2⎩⎤n = 10解得:⎤n = 10, ⎩ = 0.5, ⎛ % = 16.3%, t p = 0.363 (2) K = 20s 1 时:200 G (s ) = s 2+ 10s⎤ 2 = 200n 2⎩⎤n = 10解得:⎤n = 14.14, ⎩ = 0.354, ⎛ %=30%, t p = 0.238结论,K 增大,超调增加,峰值时间减小。
自动控制原理答案(第二版)+中国电力出版社

第二部分古典控制理论基础习题详解一 概述2-1-1 试比较开环控制系统和闭环控制系统的优缺点。
【解】:控制系统优点缺点开环控制简单、造价低、调节速度快调节精度差、无抗多因素干扰能力闭环控制抗多因素干扰能力强、调节精度高结构较复杂、造价较高2-1-2试列举几个日常生活中的开环和闭环控制系统的例子,并说明其工作原理。
【解】:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
2-1-3 试判断下列微分方程所描述的系统属何种类型(线性、非线性;定常、时变)。
【解】:(1)线性定常系统;(2)线性时变系统;(3)非线性定常系统;(4)线性定常系统。
122-1-4 根据题2-1-1图所示的电动机速度控制系统工作原理图:(1)将a ,b 与c ,d 用线连接成负反馈系统;(2)画出系统方框图。
【解】:(1)a -d 连接,b -c 连接。
(2)系统方框图题2-1-4解图抽头移动,电动机获得一个正电压,通过齿轮减速器传递,使阀门打开,从而增加入水流量使水位上升,当水位回到给定值时,电动机的输入电压又会回到零,系统重新达到平衡状态。
自动控制原理试卷及答案

1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分)(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、系统的信号流图如图所示,求输出C (S )的表达式。
自动控制原理答案 第二版(孟庆明)

+
K1K3
2-2 解:对微分方程做拉氏变换
⎧ X1(s) = K[R(s) − C(s)]
⎪ ⎪
X
2
(
s
)
=
τ
sR
(s)
⎪⎪⎨⎪((Ts s++1)1X) X3(4s()s)==XX1(3s()s+)
X 2 (s) + X5(s
)
⎪C(s) ⎪
=
X 4 (s)
−
N (s)
⎪⎩ X5 (s) = (Ts +1)N (s)
P1 = G1G2G3, Δ1 = 1
P2 = 1, Δ2 = 1
(3)闭环传递函数 C/R 为
后τs
N(s)
X5(s)
Ts+1
R(s)
课 X1(s) K
-
1 X3(s) s +1
1
X4(s) — C(s)
Ts +1
K
+ τs
C(s)
R(s)
=
(s
+ 1)(Ts 1+
+ 1)
(s +1)(Ts +1) =
K +τs
k
Ts2 + (T +1)s + (K +1)
(s +1)(Ts +1)
C(s) N(s) = 0
1-5 解: 系统的输出量:电炉炉温 给定输入量:加热器电压 被控对象:电炉
仓库大门自动控制开(闭)的职能方框图
1
放大元件:电压放大器,功率放大器,减速器 比较元件:电位计 测量元件:热电偶 职能方框图:
给定 炉温
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二部分古典控制理论基础习题详解
一 概述
2-1-1 试比较开环控制系统和闭环控制系统的优缺点。
【解】:
控制系统优点缺点
开环控制简单、造价低、调节速度快调节精度差、无抗多因素干扰能力闭环控制抗多因素干扰能力强、调节精度高结构较复杂、造价较高
2-1-2试列举几个日常生活中的开环和闭环控制系统的例子,并说明其工作原理。
【解】:
开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
2-1-3 试判断下列微分方程所描述的系统属何种类型(线性、非线性;定常、时变)。
【解】:
(1)线性定常系统;(2)线性时变系统;(3)非线性定常系统;(4)线性定常系统。
1
2
2-1-4 根据题2-1-1图所示的电动机速度控制系统工作原理图:
(1)将a ,b 与c ,d 用线连接成负反馈系统;
(2)画出系统方框图。
【解】:
(1)a -d 连接,b -c 连接。
(2)系统方框图
题2-1-4解图
抽头移动,电动机获得一个正电压,通过齿轮减速器传递,使阀门打开,从而增加入水流量使水位上升,当水位回到给定值时,电动机的输入电压又会回到零,系统重新达到平衡状态。
反之易然。
题2-1-5解图
2-1-6 仓库大门自动控制系统如图所示,试分析系统的工作原理,绘制系统的方框图,指出各实际元件的功能及输入、输出量。
【解】:
当给定电位器和测量电位器输出相等时,放大器无输出,门的位置不变。
假设门的原始平衡位置在关状态,门要打开时,“关门”开关打开,“开门”开关闭合。
给定电位器与测量电位器输出不相等,其电信号经放大器比较放大,再经伺服电机和绞盘带动门改变位置,直到门完全打开,其测量电位器输出与给定电位器输出相等,放大器无输出,门的位置停止改变,系统处于新的平衡状态。
系统方框图如解图所示。
元件功能
电位器组——将给定“开”、“关”信号和门的位置信号变成电信号。
为给定、测量元件。
放大器、伺服电机——将给定信号和测量信号进行比较、放大。
为比较、放大元件。
绞盘——改变门的位置。
为执行元件。
门——被控对象。
系统的输入量为“开”、“关”信号;输出量为门的位置。
3。