电容器组装机槽轮机构的设计与分析
《机械设计原理》槽轮机构

3.槽轮机构的应用
2槽轮机构
你一定看过电影,屏幕上连续播放的生动画面,让你 心旷神怡。但你知道吗?胶片的走动必须是间歇的,而槽 轮机构则为实现其间歇运动的可选方案之一。
放映机
3.槽轮机构的应用
自动灌装机
2槽轮机构
自动传送链装置
2 槽轮机构
1. 槽轮机构的工作原理 2. 槽轮机构的类型和特点 3. 槽轮机构的应用 4. 槽轮的槽数与运动特性
2.槽轮机构的类型和特点
2槽轮机构
圆销分布不等
用于要求拨盘转一周,槽轮k
次停歇的时间互不相等时。
圆销中心半径不等 用于拨盘旋转一周中槽轮k次的
运动时间也互不相等时。
2.槽轮机构的类型和特点
槽条机构
2槽轮机构
球面槽轮机构
2 槽轮机构
1. 槽轮机构的工作原理 2. 槽轮机构的类型和特点 3. 槽轮机构的应用 4. 槽轮的槽数与运动特性
当圆销开始进入径向槽时,两锁止弧脱开,槽轮在 圆销的驱动下转动。
2 槽轮机构
1. 槽轮机构的工作原理 2. 槽轮机构的类型和特点 3. 槽轮机构的应用 4. 槽轮的槽数与运动特性
2.槽轮机构的类型和特点
2槽轮机构
2.槽轮机构的类型和特点 外啮合与内啮合
2槽轮机构
除从动件转向不同外,内啮合槽轮机构结构紧凑,传动 较平稳。
第8章 间歇运动机构
1 棘轮机构 2 槽轮机构 3 凸轮式间歇机构 4 不完全齿轮机构
2 槽轮机构
1. 槽轮机构的工作原理 2. 槽轮机构的类型和特点 3. 槽轮机构的应用 4的工作原理
2槽轮机构
主动销轮作等速转动,当圆销未进入径向槽时,槽 轮因其内凹的锁止弧被销轮外凸的锁止弧锁住而静止;
槽轮机构的运动分析与优化设计
⑥
2 1 SiT c. nn. 0 c. eh E gg 1
仪 表 技 术
槽 轮 机 构 的运 动 分析 与优 化 设 计
章 磊 赵 鹏 兵
( 都 亿 维 电 力 成 套 设 备 有 限公 司 , 都 60 4 ; 北 工 业 大 学 现代 设 计 与 集 成 制 造 技 术 教 育 部 重点 实 验 室 , 安 70 7 ) 成 成 10 1西 西 10 2
一
0 ≤ 0 ≤ 00 加 2 2。
3 算例研究 ”]
中 图法分类号
T 1.; H12 4
文献标志码
A
现代 机 械 装 备 中大 量 应 用 间歇 传 动 机 构 。
作 为一 种典 型 的 间 歇 运 动 机 构 , 轮 机 构 常 用 于 槽 包装机械 、 自动 化 生 产 线 及 某 些 自动 机 构 中 , 以
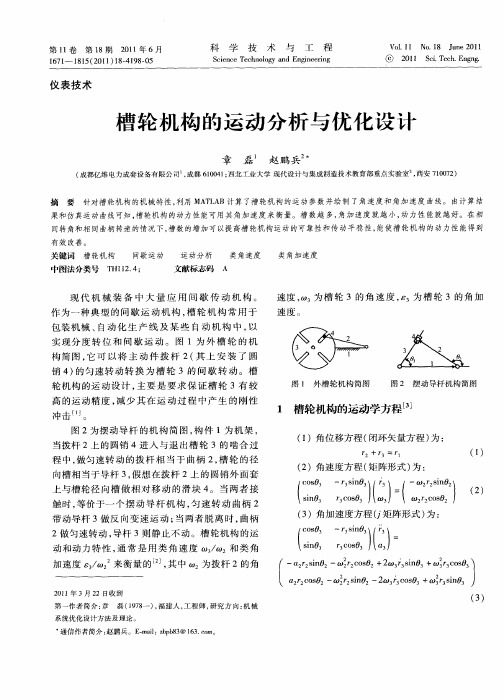
实 现 分 度 转 位 和 间 歇 运 动 。 图 1为 外 槽 轮 的 机
速 度 , 为槽 轮 3的角 速 度 , 为 槽 轮 3的 角 加 ,
速度 。
构 简 图 , 可 以 将 主 动 件 拨 杆 2 其 上 安 装 了 圆 它 (
销 4) 的匀 速 转 动 转 换 为 槽 轮 3的 间 歇 转 动 。槽
轮机 构 的运 动 设 计 , 主要 是 要 求 保 证 槽 轮 3有 较
图 1 外 槽 轮 机 构 简 图 图 2 摆 动 导杆 机 构 简 图
高 的运 动 精 度 , 少 其 在 运 动 过 程 中产 生 的 刚 性 减
冲击 ¨。
1 槽轮机构的运动学方程 ]
( )角 位 移 方 程 ( 环 矢 量 方 程 ) : 1 闭 为
槽轮机构设计方案
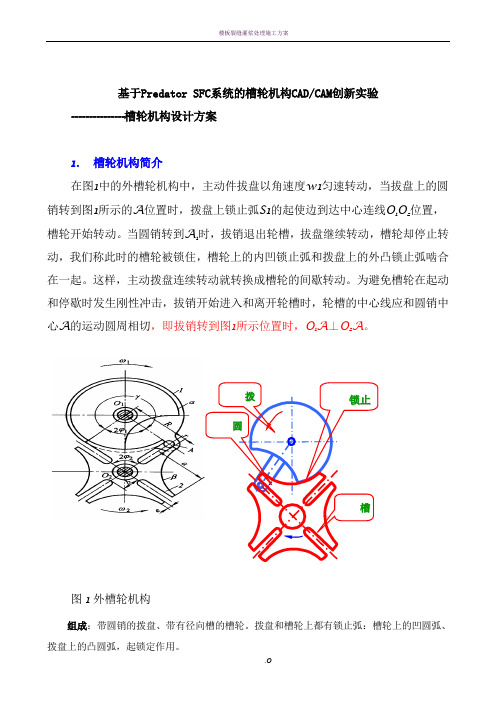
基于Predator SFC 系统的槽轮机构CAD/CAM 创新实验---------------槽轮机构设计方案1. 槽轮机构简介在图1中的外槽轮机构中,主动件拔盘以角速度w1匀速转动,当拔盘上的圆销转到图1所示的A 位置时,拨盘上锁止弧S1的起使边到达中心连线O 1O 2位置,槽轮开始转动。
当圆销转到A 1时,拔销退出轮槽,拔盘继续转动,槽轮却停止转动,我们称此时的槽轮被锁住,槽轮上的内凹锁止弧和拨盘上的外凸锁止弧啮合在一起。
这样,主动拨盘连续转动就转换成槽轮的间歇转动。
为避免槽轮在起动和停歇时发生刚性冲击,拔销开始进入和离开轮槽时,轮槽的中心线应和圆销中心A 的运动圆周相切,即拔销转到图1所示位置时,O 1A ⊥O 2A 。
图1外槽轮机构组成:带圆销的拨盘、带有径向槽的槽轮。
拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘上的凸圆弧,起锁定作用。
ωωo o 锁止弧 槽轮 拨盘 圆销工作过程:拨盘连续回转,当两锁止弧接触时,槽轮静止;反之槽轮运动。
作用:将连续回转变换为间歇转动。
特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地进行转位。
因槽轮运动过程中角速度有变化,不适合高速运动场合。
2.槽轮机构优点(1)结构简单,工作可靠,效率较高;(2)在进入和脱离啮合时运动较平稳,能准确控制转动的角度;(3)转位迅速,从动件能在较短的时间内转过较大的角度;(4)槽轮转位时间与静止时间之比为定值。
3.槽轮机构缺点(1)槽轮的转角大小不能调节;(2)槽轮转动的始、末位置加速度变化较大,从而产生冲击:(3)在工作盘定位精度要求较高时,利用锁紧弧面往往满足不了要求,而需另加定位装置。
(4)槽轮的制造与装配精度要求较高。
由于这些原因,槽轮机构一般应用在转速不高的装置中。
4.槽轮机构的工作原理槽轮机构,又叫马尔他机构或日内瓦机构,由具有径向槽的槽轮1和具有拨销2的拨杆3组成,其工作原理如图2所示。
图2 槽轮机构工作原理简图当拨杆转过一定的角度,拨动槽轮转过一个分度角,由图(a)所示的位置转到图(b)所示的位置时,拨销退出轮槽,此后,拨杆空转,直至拨销进入槽轮的下一个槽内,才又重复上述的循环。
04-槽轮机构的运动分析-1

04-槽轮机构的运动分析-104-槽轮机构的运动分析-1% 外槽轮机构运动分析dr=pi/180.0; % 角度与弧度的转换系数% 销轮2转角范围:-f20<f2<f20,步长为bc度,计算运动参数< bdsfid="66" p=""></f2<f20,步长为bc度,计算运动参数<> for z=4:2:10 % 设定槽轮槽数f30=pi/z; % 计算槽轮槽间半角f20=pi/2-f30; % 计算销轮运动半角lmd=sin(pi/z); % 计算曲柄2与机架1的长度比bc=10; % 循环步长cz=-f20/dr; % 循环初值zz=f20/dr; % 循环终值i=1; % 根据步长变化的运动参数矩阵cs行数计数器for f2=cz:bc:zz % 计算槽轮角位移、类角速度、类角加速度wy=atan(lmd*sin(f2*dr)/(1-lmd*cos(f2*dr)));sd=lmd*(cos(f2*dr)-lmd)/(1-2*lmd*cos(f2*dr)+lmd^2);jsd=-lmd*sin(f2*dr)*(1-lmd^2)/(1-2*lmd*cos(f2*dr)+lmd^2)^2;switch z % 矩阵c(i,:)表示第i行的各列元素case 4,c4(i,:)=[f2 wy/dr sd jsd];case 6,c6(i,:)=[f2 wy/dr sd jsd];case 8,c8(i,:)=[f2 wy/dr sd jsd];case 10,c10(i,:)=[f2 wy/dr sd jsd];endi=i+1;endend% 输出外槽轮机构运动参数['轮槽数z=4'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c4(:,1),c4(:,2),c4(:,3),c4(:,4)]['轮槽数z=6'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c6(:,1),c6(:,2),c6(:,3),c6(:,4)]['轮槽数z=8'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c8(:,1),c8(:,2),c8(:,3),c8(:,4)]['轮槽数z=10'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c10(:,1),c10(:,2),c10(:,3),c10(:,4)]%% 绘制槽轮机构运动参数曲线figure(1); % 生成槽轮运动线图窗口subplot(2,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c4(:,1),c4(:,4)) % 绘制z= 4的线图title('外槽轮槽数z=4') % 标注子窗口名称axis([-pi/4/dr pi/4/dr -6 6]) % 定义坐标轴范围grid % 栅格线text(-2,4.2,'\epsilon/\omega^{2}') % 标注类角加速度线图text(20,1.6,'\omega/\omega') % 标注类角速度线图ylabel('槽轮运动线图') % 定义纵坐标轴名称%subplot(2,2,2); % 选择第2个子窗口plot(c6(:,1),c6(:,3),c6(:,1),c6(:,4)) % 绘制z= 6的线图title('外槽轮槽数z=6')axis([-pi/3/dr pi/3/dr -1.5 1.5])gridtext(10,-0.7,'\epsilon/\omega^{2}')text(30,0.7,'\omega/\omega')ylabel('槽轮运动线图')%subplot(2,2,3); % 选择第3个子窗口plot(c8(:,1),c8(:,3),c8(:,1),c8(:,4)) % 绘制z= 8的线图title('外槽轮槽数z=8')axis([-3*pi/8/dr 3*pi/8/dr -0.8 0.8])gridtext(12,-0.3,'\epsilon/\omega^{2}')text(40,0.4,'\omega/\omega')ylabel('槽轮运动线图')%subplot(2,2,4); % 选择第4个子窗口plot(c10(:,1),c10(:,3),c10(:,1),c10(:,4)) % 绘制z=10的线图title('外槽轮槽数z=10')axis([-2*pi/5/dr 2*pi/5/dr -0.5 0.5])gridtext(15,-0.2,'\epsilon/\omega^{2}')text(40,0.3,'\omega/\omega')ylabel('槽轮运动线图')%figure(2); % 生成类线图窗口subplot(1,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c6(:,1),c6(:,3),c8(:,1),c8(:,3),c10(:,1),c10(:,3)) title('\omega/\omega')axis([-f20/dr f20/dr -0.1 2.5])gridtext(-10,0.35,'z=10')text(-8,0.7,'z=8')text(-8,1.1,'z=6')text(10,2.1,'z=4')ylabel('槽轮类角速度线图')%subplot(1,2,2); % 选择第2个子窗口plot(c4(:,1),c4(:,4),c6(:,1),c6(:,4),c8(:,1),c8(:,4),c10(:,1),c10(:,4)) title('\epsilon/\omega^{2}')axis([-f20/dr f20/dr -5.5 5.5])gridtext(-50,0.2,'z=10')text(-30,0.9,'z=8')text(-25,1.6,'z=6')text(0,3.5,'z=4')ylabel('槽轮类角加速度线图')。
槽轮机构的组成及其特点
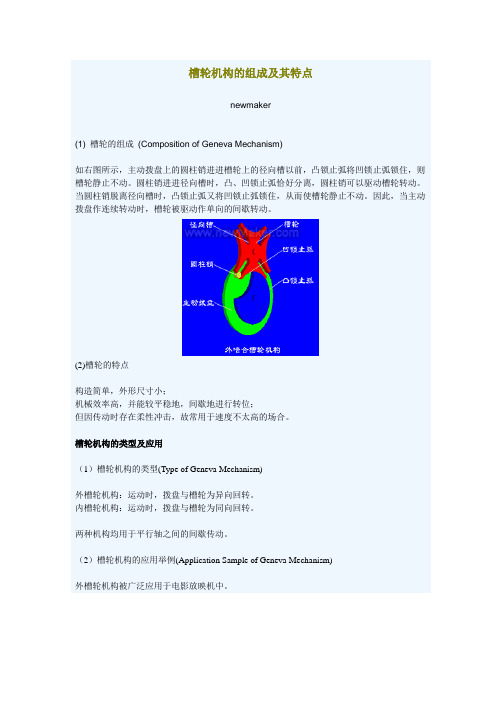
槽轮机构的组成及其特点newmaker(1) 槽轮的组成(Composition of Geneva Mechanism)如右图所示,主动拨盘上的圆柱销进进槽轮上的径向槽以前,凸锁止弧将凹锁止弧锁住,则槽轮静止不动。
圆柱销进进径向槽时,凸、凹锁止弧恰好分离,圆柱销可以驱动槽轮转动。
当圆柱销脱离径向槽时,凸锁止弧又将凹锁止弧锁住,从而使槽轮静止不动。
因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。
(2)槽轮的特点构造简单,外形尺寸小;机械效率高,并能较平稳地,间歇地进行转位;但因传动时存在柔性冲击,故常用于速度不太高的场合。
槽轮机构的类型及应用(1)槽轮机构的类型(Type of Geneva Mechanism)外槽轮机构:运动时,拨盘与槽轮为异向回转。
内槽轮机构:运动时,拨盘与槽轮为同向回转。
两种机构均用于平行轴之间的间歇传动。
(2)槽轮机构的应用举例(Application Sample of Geneva Mechanism)外槽轮机构被广泛应用于电影放映机中。
(3)球面槽轮机构(Sphere Geneva Mechanism)当需要在两相交轴之间进行间歇传动时,可采用球面槽轮机构。
右图为球面槽轮机构。
槽轮机构的运动系数及运动特性(1)槽轮机构的运动系数k (Motion Factor of Geneva Mechanism)k=td/t又因拨盘1一般为等速回转,因此时间的比值可以用拨盘转角的比值来表示。
可得外槽轮机构运动系数的另一表达式:由于运动系数k应大于零,所以由上式可知外槽轮径向槽的数目z应大于3。
又由上式可知,运动系数k总是小于0.5的。
也就是说,在这种槽轮机构中,槽轮的运动时间总是小于其静止的时间。
假如在拨盘1上均匀分布地装有n个圆销,则当拨盘转动一周时,槽轮将被波动n次,故运动系数是单圆销k=n(1/2-1/z)又因k值应小于或即是1,即n(1/2-1/z)≤1由此得n≤2z/(z-2)由此式可得槽轮z与圆销数n的关系如下表2)外槽轮机构的运动特性(Motion Property of Geneva Mechanism)如图所示为外槽轮机构在运动过程中的任一位置。
槽轮机构设计与制作毕业设计说明书
%
F500.
O0125
N116 G1 X-15.
N100 G21
N118 G2 X-14.6 Y0. I0. J-.4
N102 G0 G17 G40 G49 G80 G90
N120 X-15. Y-.4 I-.4 J0.
N106 G0 G90 G54 X-26.024 Y-.1 A0.
N122 G1 X-32.253
(三)机床的选择
数控铣床选择学校车间的法兰克数控铣床。
(四)装夹方式的确定
在铣削时,也就是在利用加工中心进行加工时大多数情况下会选择机床所带的通用夹 具平口钳对工件进行定位和夹紧。因为平口钳对方形毛坯装夹比较方便,所以选择平口钳 装夹。
(五)刀具的选择
在整个加工过程中一共需要选择二把道具:直径为 6mm 立铣刀,直径为 10mm 中心钻 和钻花。
J-.657 N160 G3 X35.25 Y-7.788 I-.108
J3.599 N162 X35.826 Y-4.443 I-35.25 J7.788 N164 X35.853 Y-4. I-3.573 J.443 N166 X32.253 Y-.4 I-3.6 J0. N168 G1 X15. N170 G2 X14.6 Y0. I0. J.4 N172 X15. Y.4 I.4 J0. N174 G1 X32.253 N176 G3 X35.853 Y4. I0. J3.6 N178 X35.826 Y4.443 I-3.6 J0. N180 X35.25 Y7.788 I-35.826 J-4.443 N182 X31.843 Y10.61 I-3.515 J-.777 N184 G2 X10.61 Y31.843 I.657 J21.89
槽轮机构的结构改进设计与应用研究_
3()252255255,33)cos 21(sin 132ωλϕλϕλλεε⋅+−−⋅==i (1.8) 其中,λ- 图1-2中拨盘5的半径与槽轮机构中心距54O O 之比35i -图1-2中递纸滚筒3与主动拨盘5的传动比;2/15/15/13/135××=i 由式(1.6)~ (1.8)可得机构运动特性曲线如图1-3所示【2】:图1-3 直线槽轮递纸机构运动曲线Fig.1-3- Kinematics characteristics of straight Geneva mechanism由图1-3可以看出,槽轮间歇递纸机构具有以下优点:(1).递纸滚筒咬牙在输纸板前后有D 6的时间速度为零,保证递纸牙在静止条件下取纸;(2).递纸滚筒的速度变化规律为近似简谐运动,无速度突变。
但是该机构存在直线槽轮机构的固有缺陷,主要表现为:(1).拨盘圆销进出槽轮瞬间存在柔性冲击。
随着转速的增高,冲击更为明显,从而影响递纸精度和套印精度。
(2).角加速度峰值过大,引起的动载荷较大,导致圆销对槽轮的压力和接触应力增大,加剧了槽轮的磨损,从而影响定位精度,造成纸张套印不准。
(3).直线槽轮设计灵活性较差。
滚筒直径和位置一经确定,传纸滚筒和递纸滚筒的加减速角0α、0β及运动系数k 即为定值,设计灵活性较差。
综上可知,直线槽轮机构在动力学性能和设计柔性方面都存在固有缺陷,主要表现为启动和停歇阶段有柔性冲击、加速度峰值过大和运动系数灵活性差,其中的动力学性能方面的缺陷随着机器精度要求的提高而日趋明显,而设计灵活性差的问题始终无法解决。
1.3槽轮机构改进方案的研究现状由以上分析可知,直线槽轮机构存在一系列固有缺陷,其根本原因是采用直线作为轮廓线所致。
为克服槽轮机构结构缺陷,设计人员提出了多种改进方案,可以归结为两类:1.槽轮机构与其他机构组合为改善直线槽轮机构的动力特性,可采用其他机构,如连杆、凸轮、齿轮机构与槽轮机构组合应用。
槽轮机构的动态特性及其影响因素分析
槽轮机构的动态特性及其影响因素分析槽轮机构的动态特性及其影响因素分析槽轮机构是一种常用的传动机构,具有许多独特的动态特性。
了解和分析槽轮机构的动态特性以及影响因素对于设计和优化传动系统非常重要。
下面将按步骤思考槽轮机构的动态特性及其影响因素,并进行分析。
第一步:了解槽轮机构的基本结构和工作原理。
槽轮机构由凸轮和凹槽组成,凸轮通过旋转使凹槽内的物体运动。
凸轮的运动轨迹决定了凹槽内物体的运动方式。
第二步:分析槽轮机构的动态特性。
槽轮机构的动态特性主要包括运动速度、加速度、位移和力等。
这些特性直接影响到机构的性能和运行稳定性。
第三步:探讨槽轮机构的运动速度特性。
槽轮机构的运动速度取决于凸轮的旋转速度和凹槽的形状。
凸轮旋转速度越大,物体在凹槽内的运动速度越快。
凹槽的形状也会影响运动速度,如凹槽的宽度和深度等。
第四步:研究槽轮机构的加速度特性。
槽轮机构的加速度描述了物体在凹槽内运动速度的变化率。
加速度可以通过凸轮的旋转加速度和凹槽形状来调节。
较大的加速度可以实现更快的物体运动速度和更高的效率。
第五步:分析槽轮机构的位移特性。
位移是物体在凹槽内的行程长度。
槽轮机构的位移受到凸轮的旋转角度和凹槽形状的影响。
凸轮旋转角度越大,物体在凹槽内的位移越大。
第六步:讨论槽轮机构的力特性。
力是槽轮机构传递的动力,直接影响着传动系统的性能和负载能力。
力的大小取决于旋转凸轮的力矩和摩擦、惯性等因素。
第七步:思考槽轮机构的影响因素。
影响槽轮机构动态特性的因素包括凸轮的形状、凹槽的设计、传动比、工作环境等。
凸轮的形状和凹槽的设计直接决定了机构的运动特性。
传动比影响着输出速度和力。
工作环境的变化也会对机构的运行稳定性产生影响。
最后,通过对槽轮机构的动态特性及其影响因素进行分析,可以为传动系统的设计和优化提供参考。
了解机构的动态特性有助于提高系统的运行效率和稳定性,通过调节影响因素可以实现更理想的传动效果。
槽轮机构的工作原理
槽轮机构的工作原理
槽轮机构是一种常见的传动机构,其工作原理是利用槽轮和槽键的配合来实现传动。
具体工作原理如下:
1. 槽轮的设计:槽轮是一个圆盘状的装置,其边缘上有一系列等距的槽。
槽的数量和形状可以根据实际需求进行设计。
2. 槽键的配合:与槽轮相配合的是一系列槽键,槽键通常是具有长方形或楔形截面的薄片。
槽键的数量和形状与槽轮的槽一一对应。
3. 传动方式:当槽轮和槽键配合时,通过转动槽轮,槽轮上的槽会逐个与槽键配合,使得槽键被推进或拉出。
这样,槽键的运动将会传递给与其相连的零件,实现传动。
4. 传动特点:槽轮机构的传动特点是具有离合功能,即当槽轮不转动时,槽键和槽之间不会有相对运动,零件之间不会产生传动;而当槽轮开始转动时,槽键和槽之间的相对运动将会传递给相连的零件,实现传动功能。
总体来说,槽轮机构的工作原理是通过槽轮和槽键的配合,利用槽键的相对运动来实现传动功能。
21槽轮机构的结构分析和应用
《机械基础》教案(2009~ 2010学年第二学期)学院山西省工贸学校系(部)机电系教研室教师梁少宁山西省工贸学校③学生学案课题名称:槽轮机构的结构分析和应用班级:姓名:(一)、工作任务:利用模型和实物教学相结合,同时利用模型演示槽轮机构等间歇机构,以此分析间歇机构的工作原理和特点都有那些?(二)、学习目标:1、会对槽轮机构工作原理、运动特点进行分析2、会对槽轮机构功能和适用场合进行分析 (三)、回答问题1、槽轮机构的工作原理是什么?2、槽轮机构的特点是什么?它一般应用在什么场合?(四)、分析该资料,完成项目任务: 一、槽轮机构1.槽轮机构的组成和工作原理1-拨盘 2—圆销3—槽轮槽轮机构能把主动轴的等速连续运动转变为从动轴周期性的间歇运动,槽轮机构常用于转位或分度机构。
图1所示为一单圆外啮合槽轮机构,它由带圆柱销2的主动拨盘1、具有径向槽的从动槽轮3和机架等组成。
槽轮机构工作时,拨盘为主动件并以等角速度连续回转,从动槽轮作时转时停的间歇运动。
O1O212 3内凹锁止弧 外凸弧O2O1a )b )当圆销2未进入槽轮的径向槽时,由于槽轮的内凹锁止弧被拨盘的外凸圆弧卡住,故槽轮静止不动。
图1a 所示为圆销2刚开始进入槽轮径向槽的位置。
这时锁止弧刚好被松开,随后槽轮受圆销2的驱使而沿反向转动。
当圆销2开始脱出槽轮的径向槽时(图1b ),槽轮的另一内凹锁止弧又被曲柄的外凸圆弧卡住,致使槽轮又静止不动,直到曲柄上的圆销2进入下一径向槽时,才能重复上述运动。
这样拨盘每转一周,槽轮转过两个角度。
2.槽轮机构类型和特点 ● 单圆销外槽轮机构 ● 双圆销外槽轮机构 ● 内啮合槽轮机构特点:结构简单,转位方便,工作可靠,传动的平稳性好,能准确控制槽轮的转角。
但转角的大小受到槽数z 的限制,不能调节,且在槽轮转动的始末位置处存在冲击,随着转速的增加或槽轮槽数的减少而加剧,故不适用于高速。
换向机构——在输入轴转向不变的条件下,可改变输出轴转向的机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
而槽轮在一个运动循环内的停歇时间为:
′
t2 =t1 -t2 =t1(1-τ)
(8)
根据以上计算可知在槽轮机构设计时必须注意以下问题:
(1)为了保证槽轮可以被曲柄所驱动,运动系数 τ 应大于 0,
即槽轮径向槽的数目应大于或等于 3。
图 3 圆销在槽轮中任一位置图 Fig.3 Cylindrical Pin Any Place the Groove
(4)
当主动件 1 以等角速度 ω1 转动时,槽轮转动一次所需的时
间为:
t2 =2φ0 /ω1
(5)
当主动拨盘对称均布有 k 个圆销时,则主动拨盘转过 2π/k
角度便完成槽轮的一个运动循环,其所需的时间为:
t1 =2π/kω1
(6)
将式(4)(5)(6)代入式(1)得:
z z τ=k
z-2 2z
(7)
2.5 2 Z=4
1.5 1
图 7 曲线槽槽轮 Fig.7 Curve Slot Geneva
5 小结
通过以上分析并结合薄膜电容器自动组装机实际结构情 况,提出对薄膜电容器自动组装机转盘 1 四工位槽轮机构,如图
0.5
Z=8
6 所示。即采用曲线槽的外槽轮机构,如图 7 所示。采用(3~5)次
0
-1.5 -0.5
转动的起点和终点没有刚性冲击,即圆销在啮入和啮出时,无刚 性冲击[5]。
4 减小槽轮机构冲击的措施
图 6 直线槽槽轮 Fig.6 Straight Slot Geneva
4.1 采用槽数较多的外槽轮机构
由图 5 可知,当圆销开始进入径向槽和刚离开径向槽时,由 于角加速度存在突变,故在此瞬间,有柔性冲击。在不改变外槽轮 机构间歇运动周期的情况下,把槽轮机构槽数增加,相应增加圆 销数,提高外槽轮机构的动力性能[6]。
来稿日期:2012-08-01 作者简介:辛 伟,(1979-),男,山西山阴人,硕士,工程师,主要研究方向:电子专用设备的研发
第6期
辛 伟等:电容器组装机槽轮机构的设计与分析
123
2
(2)运动系数 τ 随着槽数 z 的增加而增大,即意味着槽数 z
的增加,导致槽轮在一个间歇运动周期里的运动时间增长。
总是小于 0.5,也就是说,在这种槽轮机构中,槽轮的运动时间总
是小于其静止时间。
3.2 槽轮机构的运动特性
如图 3 所示,槽轮在运动的任一瞬时,设拨盘位置角用 α 来
表示,槽轮位置角用 φ 表示。并规定在圆销进入区为正,在圆销离
开区为负,变化区间为:-α1燮α燮α1;-φ1燮φ燮φ1。在 ΔABO1 和
其中转盘 1 为四工位槽轮机构,转盘 2 与转盘 3 为八工位槽轮 机构。槽轮机构以其结构简单,易加工,工作可靠,转角准确,机 械效率高,在自动机械中得到广泛应用。在薄膜电容器自动组 装机安装调试过程中,发现转盘 1 与转盘 2、转盘 3 相比,存在 着运行不平稳,冲击声大等现象。为使槽轮机构传动平稳,减小 冲击,以转盘 1 四工位外槽轮机构为例,对其进行运动分析,提 出问题所在,对其进行改进。
令 λ=R/L=sin(π/z)代入式(10)得:
-1
φ=tg
λsinα
1-λcosα
(11)
分别将式(11)对时间求一阶导数和二阶导数,并令 ω2 =dφ/
2
2
dt,α2 =d φ/dt ,则得:
ω2 =
λ(cosα-λ)
2
·ω1
1-2λcosα+λ
(12)
α2 = 燮λ1-燮2λλ2 -co1sαz·1 s+iλnα2 z2 ·ω12
1 引言
转盘 1
薄膜电容器自动组装机为薄膜电容器的生产提供了一种 新的工艺。为实现薄膜电容器的供料、换位、焊接、装壳、计数、
转盘 2
检测等全自动工艺操作,必须要求设备中的执行机构或辅助机 构作周期性的停歇运动。自动机械和各种生产线上常用的间歇
转盘 3
运动机构有:棘轮机构、槽轮机构、星轮机构、不完全齿轮机构、
运动时间 t1 之比,称为运动系数用 τ 表示,即:τ= t2 t1
(1)
2。槽数 z>9 的槽轮机构比较少见,因为当中心距一定时,z 越大,
槽轮的尺寸也越大,槽轮转动时惯性力矩也增大,且当 z>9 时,槽
数如再增加,τ 的变换也不大,故 z 常取(4~8)。
(4)k=1 的单销外槽轮机构,槽轮的槽数无论取多少,τ 的值
参考文献
Z=4
4
[1]邹慧君,傅祥志,张春林.机械原理[M].北京:高等教育出版社,1999:
208-209.
2
(Zou Hui -jun,Fu Xiang -zhi,Zhang Chun -lin. Principle of Machinery
Z=8
[M].Beijing: Higher Education Press,1999:208-209).
0 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5
[2]孙桓,陈作模.机械原理[M].北京:高等教育出版社,2001:413-422. (Sun Huan,Chen Zuo-mo. Principle of machinery [M].Beijing: Higher
Design and Analysis of Geneva Mechanism in Capacitors Automatic Assembly Machine
XIN Wei,ZHANG Su-zhi,ZHENG Hai-hong
(The Second Research Institute of CETC,Shanxi Taiyuan 030024,China)
(13)
2
令 i21 =ω2 /ω1 ,kα =α2 /ω1 ,代入式(12)(13)则得:
i21 =
λ(cosα-λ)
2
1-2λcosα+λ
(14)
kα =
λ 燮λ2 -1 z·sinα
燮1-2λcosα1
2
+λ
2
z
(15)
No.6
124
机械设计与制造
June.2013
将上述 i21,kα 随α的变化绘制成曲线,称为槽轮机构的运动 运动规律,正确设计出曲线槽,以达到改善其动力特性的目的。 特性曲线,如图 4、图 5 所示。当拨盘的角速度 ω 一定时,槽轮的
连杆间歇机构、齿轮连杆间歇机构、凸轮式间歇机构以及其他组
合式间歇机构,如图 1 所示。在薄膜电容器自动组装机中共三 个转盘,其转位机构就是一种典型的间歇运动机构—槽轮机构,
图 1 电容组装机槽轮机构 Fig.1 Geneva Mechanism of Capacitor Assembly Machine
ΔABO2 中有如下关系:
tgφ= AB = Bsinα O2 B L-Rcosα
(10)
它是用来衡量槽轮的运动时间在一个间歇周期中所占的比
例。
如图 2 所示,为了避免或减轻槽轮在开始转动和停止转动
时的碰撞或冲击,圆销在开始进入径向槽或从径向槽脱出的瞬
时,圆销中心的线速度方向均需沿着径向槽的中心线方向,以便
0.5
1.5
多项式运动规律的曲线槽的槽轮机构,在圆销啮入和啮出时,加 速度为 0,无柔性冲击。转盘 1 四工位槽轮机构的改进,使整机噪
图 4 槽轮机构角速度变化曲线 Fig.4 Angular Velocity Curve of Geneva Mechanism
音由原来的 80dB 下降为 60dB,薄膜电容器的送料与焊接也更为 平稳,产品质量得到极大改善。
Abstract:Film capacitor automatic assembly machine is the key equipment in the production of thin film capacitors,which implements the core and the lead film capacitor welding,and welding equipment shell and injecting process automation. It mainly discussed the geneva mechanism of the film capacitor automatic assembling machine,raised the problem existed, presented the composition and work principle,analyzed and discussed the Kinetic coefficient and Kinetic characteristic, calculated the speed and acceleration,explained the reason why the outer Geneva mechanism does not run smoothly and have impact,carried out the way to improve the Kinetic coefficient,put forward specific measures to diminish the impact,and finally improved the Geneva mechanism of the film capacitor automatic assembling machine. Key Words:Geneva Mechanism;Kinetic Coefficient;Kinetic Characteristic;Impact
槽轮在起动和停止时的瞬时角速度为 0,即要求 O1P⊥O2P,O1P′
⊥O2P′由图可得: