行星滚柱丝杠副额定静载荷计算方法对比分析
滚珠丝杠计算

滚珠丝杠计算1. 确定滚珠丝杠副的导程根据电机的额定转速和x向滑板的最大转速,计算丝杠的导程。
x向运动的驱动电机选用松下mdma152p1v,电机最大转速为4500 rpm。
电机与滚珠丝杠采用联轴器连接,传动比为0.99。
X方向最大速度为24m / min,即24000 mm / min。
丝杠的引线是实际pH = 10 mm即可满足速度要求。
2 、滚珠丝杠副的载荷及转速计算滚动导轨承重时的滑动摩擦系数最大为0.004,静摩擦系数与摩擦系数差别不大,此处计算取静摩擦系数为0.006。
则导轨静摩擦力:式中:M —工件及工作台质量,M为500kg。
f —导轨滑块密封阻力,按4个滑块,每个滑块密封阻力5N。
由于该设备主要用于检测,丝杠工作时不受切削力,检测运动接近匀速,其阻力主要来自于导轨、滑块的摩擦力。
则有:滚珠丝杠副的当量载荷:滚珠丝杠副的当量转速:3 、滚珠丝杠副预期额定动载荷3.1、按滚珠丝杠副的预期工作时间计算:式中:nm —当量转速,Lh —预期工作时间,测试机床选择15000小时f W —负荷系数,平稳无冲击选择fW =1fa —精度系数,2级精度选择f a =1fc —可靠性系数,一般选择fc =13.2 按滚珠丝杠副的预期运行距离计算:式中:Ls —预期运行距离,一般选择Ls = 24X103m3.3 、按滚珠丝杠副的预加最大轴向负载计算:式中:fe —预加负荷系数,轻预载时,选择fe = 6.7fmax —丝杠副最大载荷4 、估算滚珠丝杠的最大允许轴向变形量dm* 重复定位精度X向运动的重复定位精度要求为0.03mm,则5 、估计算滚珠丝杠副的螺纹底X5.1 、根据X向运动行程为1000mm,可计算出两个固定支承的最大距离:L» (1.1~1.2) ´l + (10~14) ´Ph= 1.2´1000+14´10 =1340mm 5.2 按丝杠安装方式为轴向两端固定,则有丝杠螺纹底X:式中:F0 —导轨静摩擦力,F0=49.4NL —滚珠螺母至滚珠丝杠固定端支承的最大距离,L = 1340mm则有6 、导程精度的选择根据X向运动的定位精度要求达到0.08mm/1000mm,则任意300mm。
行星滚柱丝杠副的研究

行星滚柱丝杠副的研究肖正义【摘要】介绍了行星滚柱丝杠副的结构及原理,并对滚珠丝杠副与滚柱丝杠副进行了比较,分析了影响滚柱丝杠副承载的因素和滚珠丝杠副的承载,列举了相应的应用领域.【期刊名称】《制造技术与机床》【年(卷),期】2019(000)001【总页数】4页(P36-39)【关键词】行星滚柱丝杠副;滚珠丝杠副;滚柱丝杠副;航天;航空【作者】肖正义【作者单位】北京工研精机股份有限公司,北京101312【正文语种】中文【中图分类】TH1321942年,瑞典人Carl Bruno Strandgren发明了行星滚柱丝杠副,直到上世纪70年代才有几家开始研发、生产行星滚柱丝杠副,由于结构过于复杂而没有普及,现在国际上也只有几家生产行星滚柱丝杠副,代表企业为德国SKF公司、瑞士ROLLVIS 公司、德国Rexroth公司等.1999年,北京机床研究所研发肠衣挤出用行星滚柱丝杠副,丝杠副规格:公称直径d0=65 mm,导程Ph=16 mm,螺纹头数为6头,滚柱数量为13个;2014年,为俄罗斯研发心脏起搏器用行星滚柱丝杠副,公称直径d0=5 mm,导程Ph=4 mm,螺纹头数为4头,滚柱数量为4个.通过研制,我们积累了一定的实践经验.近几年,一些单位及高校过分强调行星滚柱丝杠副的优点,而忽视该丝杠副的缺点及可靠性,还强调可以用于航天、航空领域,为此,笔者感到担忧,特写此文以供参考[1-4].1 行星滚柱丝杠副的结构及原理行星滚柱丝杠副的结构图见图1.行星滚柱丝杠副主要由滚柱丝杠1、滚柱螺母2、滚柱3、内齿圈4、压盖5及挡圈6组成.滚柱丝杠与滚柱螺母为齿形角90°的多头螺纹,法向截形见图2.滚柱为齿形为双凸圆弧的单头螺纹,法向截形见图3.若干滚柱围绕丝杠均匀分布.当滚柱丝杠旋转时,滚柱既围绕丝杠轴作公转,又围绕自身轴线作自传,带动滚柱螺母作轴向移动.因此,滚柱丝杠副滚柱与丝杠、螺母为滚动摩擦,传动效率最高可以达到90%.行星滚柱丝杠副承载主要靠滚柱螺纹与丝杠、螺母90°齿形角两边点接触承载.滚柱丝杠、滚柱螺母与滚柱啮合原理图见图4,模型图见图5.滚柱两端内齿圈的作用是通过内齿圈与滚柱端部外齿啮合,防止滚柱与滚柱丝杠、滚柱螺母摩擦运动时产生倾斜,造成啮合齿损坏,丝杠副不能运转.2 滚珠丝杠副与滚柱丝杠副比较滚珠丝杠副结构图见图6,丝杠、螺母、滚珠配合截面图见图7.3 影响滚柱丝杠副承载的因素滚柱丝杠副在理论上计算载荷对于小规格、小导程要大于滚珠丝杠副,但实际承载比理论承载要小很多.主要原因如下:(1)滚柱与丝杠、螺母的牙型接触点.如果丝杠副增大滚柱直径预紧,即消除丝杠副间隙,滚柱与丝杠、螺母90°牙型每一牙是四点接触(丝杠两点、螺母两点),这是很难做到的,因为多个滚柱的公称直径一致性难以做到很高,没有滚珠直径一致性高.因此,一般行星滚柱丝杠副滚柱与丝杠、螺母接触由于间隙影响两点接触,行星滚柱丝杠副都是通过双螺母预紧消除间隙,单螺母是有间隙的,有间隙滚柱每一牙只能两点接触,间隙过大,使用时接触点上移,承载下降很快,主要是丝杠、螺母每一牙深度较小,牙顶强度差.表1 滚珠丝杠副与滚柱丝杠副比较滚珠丝杠副行星滚柱丝杠副结构组成由丝杠、螺母、钢球、导珠管等组成.丝杠和螺母螺纹为单头或多头.丝杠、螺母螺纹滚道为单圆弧滚道或双圆弧滚道.结构简单.由丝杠、螺母、滚柱、内齿圈、压盖、挡圈等构成.丝杠、螺母为齿形角90°三角形多头螺纹.滚柱为双凸圆弧齿形单头螺纹.结构复杂.循环方式特点丝杠、螺母滚道通过导珠管组成滚珠循环回路,每一个导珠管组成1.5圈或多圈滚珠链,丝杠副可以由多个导珠管组成多个滚珠链.滚柱丝杠副结构类似于行星齿轮结构.丝杠副有多个滚柱,且滚柱与丝杠、螺母呈多点接触.滚动体滚珠滚柱外形尺寸由于滚珠螺母及滚珠丝杠滚道槽较深,滚珠嵌在丝杠、螺母内部,因此,滚珠螺母外形尺寸小.由于丝杠螺母牙型深度较小,滚柱直径又大,滚柱螺母外形尺寸大.运动平稳性由于滚珠在丝杠副循环滚珠链中运动要通过返向机构,容易产生冲击,影响丝杠副平稳性.滚柱在丝杠副中滚动没有返向机构,不产生冲击、震动,因而丝杠副运行平稳.传动效率由于滚珠外表面粗糙度高且精度高,滚动摩擦系数小,传动效率高,可以大于90%.虽滚柱与丝杠、螺母接触为点接触及滚动摩擦,由于螺母、丝杠及滚柱加工误差及表面粗糙度等原因,传动效率一般低于90%.承载小规格、小导程,承载小,大规格、大导程承载大.滚柱接触点多,接触承载大.小规格、小导程行星滚柱丝杠副承载大于滚珠丝杠副承载.加工及装配工艺性简单复杂可靠性结构简单,零件加工及装配精度易于保证,因此,可靠性高.丝杠、螺母为多头细牙螺纹,由于螺纹分度误差及牙型强度等原因,实际承载远小于理论承载,且可靠性差.(2)滚柱丝杠、滚柱螺母牙型90°及半角误差.滚柱丝杠及滚柱螺母牙型半角在加工过程中存在加工误差,由于半角误差而影响滚柱的接触点数,并且影响丝杠副正、反向承载.(3)滚柱丝杠、滚柱螺母螺纹分头误差.由于滚柱丝杠、滚柱螺母都是多头螺纹,分头出现误差则丝杠副难以多头全部承载,承载大小取决于接触头数多少,很多厂家样本的实物照片都能看到丝杠副部分螺纹头数承载,见图1.(4)滚柱牙型半径及圆心.滚柱牙型半径及圆心是滚柱螺母、滚柱丝杠产生最佳滚动摩擦而确定的半径及圆心见图4,因此,滚柱牙型的加工要求严格,牙型的左右圆弧半径误差及圆心直接影响承载.(5)滚柱两端外齿与内齿圈的啮合精度.滚柱两端的直齿与内齿圈啮合,保证滚柱在滚动运行时,始终与丝杠轴线保持平行,由于滚柱丝杠、滚柱螺母螺纹的加工误差及齿形粗糙度等影响,直接影响滚柱运行的平稳性,由内齿圈校正滚柱姿态,如果啮合间隙过大,很容易造成丝杠副破坏.(6)滚柱丝杠、滚柱螺母、滚柱的螺纹导程精度.滚柱丝杠、滚柱螺母、滚柱的螺纹导程精度直接影响滚柱每一牙的接触点数.因而影响丝杠副的实际承载.(7)滚柱丝杠、滚柱的直线度.只有滚柱丝杠、滚柱直线度很好的情况下,滚柱的牙型接触点是均匀的,如果丝杠、滚柱有弯曲,则接触点不能保证每点接触,实际承载将下降.从以上分析可知,行星滚柱丝杠副的结构设计可靠性差,承载高只是理想状态.这就是该丝杠副发明后没有普及应用的主要原因.滚珠丝杠副虽是同时代诞生,由于滚珠丝杠副结构简单,精度高,传动效率高,因此,上世纪40年代,随着汽车产业的发展,滚珠丝杠副生产厂家把精力投入到滚珠丝杠副的研究中,经过多年发展,现滚珠丝杠副已广泛应用于机械、航天、航空、核工业等各领域,滚珠丝杠副的品种不断增多,如高精度滚珠丝杠副、高速滚珠丝杠副、大导程滚珠丝杠副、微型滚珠丝杠副、自润滑滚珠丝杠副、重载滚珠丝杠副等.作为传动部件——滚珠丝杠副是现在最为普遍使用的传动部件,并得到高速发展,国家科技重大专项(04专项)“高档数控机床与基础制造装备”科技重大专项中将“滚珠丝杠副”的研究作为重点内容之一.4 滚珠丝杠副的承载现阶段大家研究行星滚柱丝杠副的主要原因是行星滚柱丝杠副承载大于滚珠丝杠副.但是,随着滚珠丝杠副的技术不断发展,日本THK、NSK等世界知名厂家推出重载滚珠丝杠副,通过改变滚珠丝杠副的结构,增大滚珠直径,增加滚珠循环圈数等办法提高滚珠丝杠副的承载,滚珠丝杠副的承载已很接近滚柱丝杠副,甚至超过滚柱丝杠副承载,且结构简单,可靠性高等优点.现行THK、NSK重载滚珠丝杠副已广泛应用于注塑机行业.日本THK重载滚珠丝杠副的结构图见图8,日本NSK重载滚珠丝杠副结构图见图9.表2、表3为滚珠丝杠副与滚柱丝杠副承载对比.行星滚柱丝杠副在小规格、小导程方面承载有优势.5 航天、航空领域的应用航天、航空领域是很特殊领域,产品在空中不可维修,因此,可靠性是第一位,其次是产品性能.滚珠丝杠副与滚柱丝杠副在同时代出现,滚珠丝杠副能快速发展,而滚柱丝杠副不能发展的主要原因就是结构复杂,加工工艺性差,可靠性差等原因,现国际上生产滚柱丝杠副也就几家,因此,花费很大精力去研究滚柱丝杠副是不经济的,并且该产品应用在航天、航空领域也是很危险的,国际上航天、航空领域大量使用的传动部件还是滚珠丝杠副.表2 滚珠丝杠副承载序号规格(直径×导程) 厂家配合外径/mm额定动载荷/kN 额定静载荷/kN 1 32×10日本THK 58 102.9 191.3日本NSK 58 71 169 240×10日本THK 66 162.6 336日本NSK 66 120 344 3 50×10日本THK 78 179.1 462.7日本NSK φ75 133 435 4 63×16 日本THK 105 577.1 1461.3日本NSK 105 450 1450表3 行星滚柱丝杠副承载序号规格(直径×导程) 厂家配合外径/mm额定动载荷/kN额定静载荷/kN 1 30×10德国Rexroth 64 101 174瑞士Rollvis 62 88.1 150.6德国SKF 63.5 51 156 2 39×10瑞士Rollvis 80 124.4 247.4德国 SKF φ80 80 204 3 48×10德国Rexroth 100 220 475瑞士Rollvis 100 207 412 4 64×18 瑞士Rollvis 115 238.1 612.36 结语滚珠丝杠副以其高效率、高精度、结构简单、加工工艺性好、可靠性高等特点,广泛应用于机械、航天、航空、仪器仪表、核工业等各领域,已被大家广泛接受.滚柱丝杠副结构复杂、工艺性差、可靠性差等特点,不适合应用于航天、航空领域.参考文献【相关文献】[1]刘更,马尚君,佟瑞庭,等.行星滚柱丝杠副的新发展及关键技术[J].机械传动,2012(5):103-108.[2]肖正义.滚珠丝杠副的发展趋势[J].制造技术与机床,2000(4):11-12.[3]汶森林.滚柱丝杠副[J].机床,1977(2):41-44.[4]靳谦忠,杨家军,孙健利.行星式滚柱丝杠副的运动特性及参数选择[J].制造技术与机床,1998(5):13-15.。
滚珠丝杠设计实例与计算

计算举例某台加工中心台进给用滚珠丝杠副的设计计算:已知: 工作台重量 W1=5000N 工作及夹具最大重量W2=3000N 工作台最大行程 LK=1000mm 工作台导轨的摩擦系数:动摩擦系数μ=0.1 静摩擦系数μ0=0.2 快速进给速度 Vmax=15m/min 定位精度20 μm/300mm 全行程25μm 重复定位精度10μm要求寿命20000小时(两班制工作十年)。
表11)确定滚珠丝杠副的导程因电机与丝杠直联,i=1 由表1查得代入得,按第2页表,取2)确定当量转速与当量载荷(1)各种切削方式下,丝杠转速由表1查得代入得(1)各种切削方式下,丝杠轴向载荷由表1查得代入得(3)当量转速由表1查得代入得(2)当量载荷代入得3)预期额定动载荷(1)按预期工作时间估算=1.3按表9查得:轻微冲击取 fw按表7查得:1~3取=0.44按表8查得:可靠性97%取fc=20000小时已知:Lh代入得计算:(2)拟采用预紧滚珠丝杠副,按最大负载Fmax=4.5按表10查得:中预载取 Fe代入得取以上两种结果的最大值4)确定允许的最小螺纹底径(1)估算丝杠允许的最大轴向变形量① ≤(1/3~1/4)重复定位精度② ≤(1/4~1/5)定位精度: 最大轴向变形量µm已知:重复定位精度10µm, 定位精度25µm① =3② =6取两种结果的小值=3µm(2)估算最小螺纹底径丝杠要求预拉伸,取两端固定的支承形式(1.1~1.2)行程+(10~14)已知:行程为1000mm,代入得5)确定滚珠丝杠副的规格代号(1)选内循环浮动式法兰,直筒双螺母型垫片预形式(2)由计算出的在样本中取相应规格的滚珠丝杠副FFZD4010-36) 确定滚珠丝杠副预紧力其中7)行程补偿值与与拉伸力(1)行程补偿值式中:=(2~4)(2) 预拉伸力代入得8)确定滚珠丝杠副支承用的轴承代号、规格(1)轴承所承受的最大轴向载荷代入得(2)轴承类型两端固定的支承形式,选背对背60°角接触推力球轴承(3)轴承内径d 略小于取代入得(4)轴承预紧力预加负荷≥(5)按样本选轴承型号规格当d=30mm 预加负荷为:≥FBP 所以选7602030TVP轴承d=30mm预加负荷为9 ) 滚珠丝杠副工作图设计(1) 丝杠螺纹长度Ls:L s =Lu+2Le由表二查得余程Le=40绘制工作图(2)两固定支承距离L1按样本查出螺母安装联接尺寸丝杠全长L(3)行程起点离固定支承距离L由工作图得Ls=1290=1350L1L=1410=30L10 ) 电机选择(略)11 ) 传动系统刚度(1)丝杠抗压刚度1)丝杠最小抗压刚度= 6.6 ×10Ksmin:最小抗压刚度 N/m Ksmind:丝杠底径2L:固定支承距离1=575 N/mKsmin2)丝杠最大抗压刚度=6.6 ×10KsmaxK:最大抗压刚度 N/m smaxK=6617 N/msmax(2) 支承轴承组合刚度1)一对预紧轴承的组合刚度KBO=2×2.34KBO:一对预紧轴承的组合刚度 N/mdQ:滚珠直径 mmZ :滚珠数Famax :最大轴向工作载荷 N:轴承接触角由样本查出7602030TUP轴承是预加载荷的3倍dQ=7.144 Z=17 =60Kamax=8700 N/mKBO=375 N/m2)支承轴承组合刚度由表13两端固定支承K b =2 KBOKb=750 N/mKb:支承轴承组合刚度 N/m 3)滚珠丝杠副滚珠和滚道的接触刚度K C = KC(KC:滚珠和滚道的接触刚度 N/mKC:查样本上的刚度 N/mFP:滚珠丝杠副预紧力 NCa:额定动载荷 N由样本查得:K C =1410 N/m;Ca=3600N;FP=1000 N得KC=920 N/m12) 刚度验算及精度选择(1)== N/m= N/mF=已知W1=5000 N ,=0.2F1000 N0=F:静摩擦力 N:静摩擦系数:正压力 NW1(2)验算传动系统刚度Kmin:传动系统刚度 NKmin已知反向差值或重复定位精度为10K=222>160min(3)传动系统刚度变化引起的定位误差=1.7m(4)确定精度:任意300mm内的行程变动量对半闭环系统言, V300pV≤0.8×定位精度-300p定位精度为20m/300V<14.3m300p丝杠精度取为3级V300p=12m<14.3(5) 确定滚珠丝杠副的规格代号已确定的型号:FFZD公称直径:40 导程:10螺纹长度:1290丝杠全长:1410P类3级精度FFZD4010-3-P3/1410×129013) 验算临界压缩载荷Fc: N丝杠所受最大轴向载荷Fmax小于丝杠预拉伸力F不用验算。
滚珠丝杠副参数计算与选用

滚珠丝杠副参数计算与选用1、计算步骤摩胶力住用力2、确定滚珠丝杠导程Ph根据工作台最高移动速度Vmax ,电机最高转速nmax,传动比等确定Ph.按下式计算,取较大圆整值.VPh= 「侦' 〔电机与滚珠丝杠副直联时,i=1〕Ln 3、 滚珠丝杠副载荷及转速计算这里的载荷及转速,是指滚珠丝杠的当量载荷 Fm 与当量转速nnt 滚珠丝杠副在n1、n2、n3 ................................... n n 转 速下,各转速工作时间占总时间的百分比 t1%、t2%、t3% ........................... tn%,所受载荷分别是F1、F2、F3 .......................... Fn .IjUl n =n - 一. + n - 土_ +n -…» 口, 珈'T1筋 2 TOT ? mr “ w F 二 ni 3/ tL t t ~扁 十%%顶『+"出雨寸,一一孔〞扁当负荷与转速接近正比变化时,各种转速使用时机均等,可按以下公式计算:n +n2?' +F ,H — irvtJu mu :auh甬 1 岖 3〔nmax:最大转速,nmin:最小转速,Fmax:最大载荷〔切削时〕,Fmin:最小载荷〔空载时〕 4、 确定预期额定动载荷 ①按滚珠丝杠副预期工作时间 Ln 〔小时〕计算:② 按滚珠丝杠副预期运行距离 Ls 〔千米〕计算:③有预加负荷的滚珠丝杠副还需按最大轴向负荷 Fmax 计算:Cam=feFmax 〔N 〕 式中:Ln-预期工作时间〔小时,见表 5〕 Ls-预期运行距离〔km 〕, 一般取250km . fa-精度系数.根据初定的精度等级〔见表 6〕选.liianlOOFf H(NJfc-可靠性系数.一般情况fc=1.在重要场合,要求一组同样的滚珠丝杠副在同样条件下使用寿命超过希望寿命的90%以上时fc见表7选fw-负荷系数.根据负荷性质〔见表 8〕选 fe-预加负荷系数.〔见表9〕 表—5各类机械预期工作时间Ln机械类型 Ln 〔小时〕普通机械 5000〜10000普通机床 10000〜20000数控机床 20000精密机床 20000测示机械 15000航空机械 1000表—8负荷性质系数fw 负荷性无冲击〔很平稍微冲击伴有冲击或振动质 稳〕表一9预加负荷系数 fe预加负荷类型 轻预载 中预载 重预载fe 6.7 4.5 3.4以上三种计算结果中, 取较大值为滚珠丝杠副的Camm5、按精度要求确定允许的滚珠丝杠最小螺纹底d2ma.滚珠丝杠副安装方式为一端固定,一端自由或游动时〔见图 -5〕侦 >2 « 10 /叫078 /匕』式中: E-杨氏弹性模量21X 105N/mm2dm-估算的滚珠丝杠最大允许轴向变形量〔mm表-6精度系数fa1.2.3级4.5710fa 1.00.90.80.7表-7可靠性系数 fc可靠性% 90 95 96 97 98 99fc 1 0.62 0.53 0.44 0.33 0.21fw 1 〜1.2 1.2 〜1.5 1.5 〜2精度等Fo-导轨静摩擦力(N).Fo= mow(m曲静摩擦系数)L-滚珠螺母至滚珠丝杠固定端支承的最大距离( mm)L-行程+平安行程+余程+螺母长度一半+支承长度的一半行程 + (2 〜4)Ph+4Ph+(4 〜6)Ph+(1/20 〜1/10)行程R (1.05 〜1.1)行程+ (10 〜14)Phb.滚珠丝杠副安装为两端支承或两端固定(见图-5)式中:L-两个固定支承之间的距离(mm)L^行程+平安行程+两个余程+螺母长度+ 一支承长度r(1.1 ~ 1.2)行程+ (10 ~ 14)Ph 其中Kg重复定位精度或11尊 n定位精度,上述两种方法估算出的小值为为系统刚性最小处刚度值,见下文12、13项计算)滚珠丝杠副公称中径dorrn^ d2m+DW钢球直径)图一5一端固定,一端游动G-Y二端支承J-J—端固定G-G6、确定滚珠丝杠副规格代号根据计算出的Ph,Cam及传动方式,使用情况,可在样本中先查出对应的滚珠丝杠公称直径do,应注意doAdom, C^Cam但不宜过大,否那么会使滚珠丝杠副转动惯量偏大,结构尺寸也偏大.接着确定循环圈数,滚珠螺母规格代号及相关的安装连接尺寸.7、确定预紧滚珠丝杠副预紧力Fp中选择预紧螺母型式的滚珠丝杠副时需确定预紧力Fp.当最大轴向工作载荷Fmax能确定时Fp=1/3 Fmax当最大轴向工作载荷不能确定时Fp=E Ca其中E值按表10选择,Ca是额定动载荷,可在样本上查到.表—10预加负荷类型轻载荷中载荷重载荷0.05 0.075 0.18、计算行程补偿值C 和预拉伸力F1考虑到丝杠运转过程中温升对丝杠副导程精度的影响,在精级要求较高的场合,应对滚珠丝杠副适当的预拉 伸.对预拉伸的滚珠丝杠副规定目标行程值C,并计算预拉伸力.C _〔x ,A : T T L&V T. ■ Hl hU L式中:C-行程补偿值〔mm 〕Dt-温度变化值2C 〜3Ca-丝杆的线膨胀系数11.8 x 10 -6度 Lu-滚珠丝杠副的有效行程〔mm 〕Lu-工作台行程+螺母长度+两个平安行程-行程+ 〔8 〜14〕Ph9、确定滚珠丝杠副支承用轴承规格型号 •计算轴承所受的最大轴向载荷FBmax,有预拉伸的滚珠丝杠副应考虑到预拉伸力Ft .•按滚珠丝杠副支承的要求选择轴承的型号.•确定轴承内径:为便于丝杠加工,轴承内径最好不大于滚珠丝杠的大径.在选用内循环滚珠丝杠副时必须有 一端轴承内径略小于丝杠底径 d2.其次轴承样本上规定的预紧力应大于轴承所承受最大载荷 FBmax 的1/3•有关轴承的其它验算工程可查轴承样本.10、滚珠丝杠副工作图设计 •滚珠丝杠副的螺纹长度 LS=Lu+2Le Le 余程见表-2Lu=行程+螺母长度•滚珠丝杠副螺母的安装连接尺寸可查样本.•滚珠螺母不应该承受径向载荷及颠覆力矩,应使作用在螺母上的轴向合力通过丝杠轴心.•可以用螺母的外圆柱面及法兰凸缘的内侧作安装基准,同时要求螺母座孔与丝杠轴承孔同心.螺母座孔端面 与螺母座孔轴F= AUE= n -At-^lE=L95At式中:F1-预位伸力〔N 〕d2-滚珠丝杠螺纹底径〔mm 〕 E-杨氏弹性模量2.1 x 105〔N/mm2〕 Dt-滚珠丝杠温升2C 〜3Cd2^ do-Dw 〔Dw :钢球半径〕线垂直.当所受载荷冲击力不大时,可仅用螺母法兰凸缘的内侧面作安装基准面,这时应保证螺母座面与导轨垂直.装配时应找螺母外圆与丝杠支承轴承孔同心.•插管式滚珠丝杠副水平放置时,为使滚珠的循环更加滚畅,应将插管置于滚珠丝杠轴线的上方.•设计螺母座,轴承座及紧固螺钉时要注意保证足够的刚性.在承载方向设计增强筋.•由工作图确定滚珠丝杠长度尺寸.11、电机的选择•作用在滚珠丝杠副上各种转矩计算.外加载荷产生的摩擦力矩TF(N.m)h'P!.=十L H 1(J 1滚珠丝杠副预加载荷Fp产生的预紧力矩Tp(N.m)FP 1 n; ,T - * 10 3射凯甲式中Ph-滚珠丝杠副导程h -未预紧的滚珠丝杠副效率1、2、3级精度的丝杠h =0.94级精度以下的丝杠h =0.85F-作用在滚珠丝杠副上的外加轴向载荷, 不同情况下取值不一样.假设计算电机启动转矩时, 机械是空载起动,F是导轨摩擦力(垂直运动F还包括机构重量);假设计算电机工作转矩时, F包括导轨摩擦力和工作载荷(垂向运动F还包括机构重量).•其他计算,请查找电机样本及相关资料.12、传动系统刚度计算1 I I-R-* IT•一般校核计算按:式中KS -滚珠丝杠副的拉压刚度.计算见下面说明Kb -滚珠丝杠支承轴承的轴向刚度.可查轴承样本及有关资料.Kc -滚珠丝杠副滚珠与滚道的接触刚度可查样本.•精确计算时,还需考虑伺服刚度,联接轴刚度,扭转刚度,螺母座、轴承座刚度等,详请查阅相关资料• KS的计算a.丝杠支承形式为一端固定,一端游动或自由X io 5=L65 —M 10-aKs= X 10-3 =1.65 X 102式中E -杨氏弹性模量2.1 X 105 〔N/mm2〕d2 - 丝杠底径〔mm〕当a=L1〔滚珠螺母至固定支承的最大距离〕时刚度最小Ks min =1.65 x 102当a=Lo 〔靠固定端的行程起点处〕时刚度最大Ks max =1.65 x 102 b.支承形式为两端支承或两端固定. Ks = = 6.6 X 102当a=L・1/2时〔即处在两支承的中点时〕刚度最小Ks min = 6.6 x 102式中L1-两支承间的距离当a=Lo时〔螺母在行程两端处〕刚度最大Ks max =6.6 x 10213、传动系统刚度验算及滚珠丝杠副的精度选择1 1k=将Ksmax, Kb, Kc及其它有关值代入KFK得七将Ksmin替换Ksmax代入得Kmin.由于数控机床精度在机床空载下验收,△ =2FO/Kmin,称摩擦死区误差. FO是机床空载时导轨上的静摩擦力] IE K=Fo(K)称为传动系数刚度变化引起的定位误差.按JB/GQ1140-89规定,数控机床反向差值主要取决于言而定位误差主要取决于滚珠丝杠副的精度,其次是 E Ko•传动系数刚度验算0.8AV反向差值,即KminA 1.6Fo/反向差值•滚珠丝杠副的精度选择开环限制系统中使用的滚珠丝杠副ep+Vu芦0.8x〔定位精度"K〕ep+V300营0.8x〔300mm 定位精度-E K〕半闭环限制系统或可以行程补偿的开环系统:epv 0.8x〔定位精度"K〕V300g 0.8 x〔300mm定位精度-E K〕先根据使用情况选择滚珠丝杠副的类型〔P类或T类〕,然后参照滚珠丝杠副的精度标准表〔见表-1〕两式计算结果确定滚珠杠副的ep,Vup或V300p,从而确定滚珠丝杠副的精度等级.14、滚珠丝杠副临界压缩载荷F的校验〔验算压杆稳定性〕F-k x 10* >、12 1 2 diKXK fl式中:d2-滚珠丝杠螺纹底径,d2^do -Dw, do-公称中径,取样本数据.Lc1-滚珠丝杠副的最大受压长度〔mm〕〔见表11〕F' max-滚珠丝杠副承受最大轴向压缩载荷〔N〕.假设滚珠丝杠承受最大载荷不是压缩载荷时, F' max不等于Fmax,视工作情况进行计算K1-平安系数.丝杠垂直安装K1=1/2丝杠水平安装K1=1/3K2-支承系数.与支承方式有关〔见表11〕表一11K2 入f支承方式简图一端固定0.25 1.875 3.4一端自由L-_端固定u__2 3.927 15.1一端游动建C.nc-极限转速〔r/min 〕Lc2-临界转速计算长度〔mm 〕〔见表11〕E-杨氏弹性模量2.1 x 105〔N/mm2〕,I 伊I-丝杠的最小惯性矩I =- JjtdjTTlE,〕 A-丝杠的最小横截面积7.8 x 10 5M/inm 3K1-平安系数.一般取0.8r-材料密度,钢密度** * 10-mTn/s-f,入-与支承形式有关的系数〔见表 -11〕16、Dn 值校验dom ・ nmaxs 70000式中:dom-滚珠丝杠副的节圆直径〔 mm 〕, dorm^d2+Dw 〔mm 〕nmax -滚珠丝杠副的最高转速17、滚珠丝杠副形位公差的标注见表-3及以下图二端支承 3.142 9.7 二端固定 4.730 21.9 15、滚珠丝杠副极限转速 nc 校验〔防止高速运转时产生共振式中:/ 序I ]A —夕唇4弟----* |序不|一1'fsFamaxv Coa式中:Coa-滚珠丝杠副的根本轴向额定静载荷〔可在样本上查到.fs-静态平安系数.一般载荷fs= 1〜2,有冲击或振动的载荷:2〜3Famax-最大轴向载荷〔N〕-~| 4|片5|A]—序4 Ar―序6 ~Aj r ~~ A]否Tz匠*「7 序4|A|某些传动类〔T类〕滚珠丝杠副,对精度要求低,但传递的载荷较大,这时可不进行有关传动精度及传动系统刚度的计算,但需进行以下两项计算:18、根本轴向额定静载荷Coa验算19、强度验算[6 ]-许用应力〔N/mm2〕d2-滚珠丝杠螺纹底径〔mm〕.fs=禳珠丝杠的支承主要有以下四种,由于复承方式不同,使容许轴向载荷及容洋回转转速也有所不同」客户应艰据自身焙况适当成择-伯一峪精速,:!&界聒谚•,固定一-固定适用于有转速、存站度危险骑速〔临界转速:支弟.固定一-支承适用于中等转速~高梏度危险话诗・15界%帝,支承一-支承适用于中等转速,中箱度宿险特速{弥界转速〕找慌轴同我何[春评鞫阿戴何'•。
滚柱直线导轨副额定静载荷分析

+I + ( D z
=I = 2 ( D 瓦 4 z )
接 s 触
= ) Q 2( √ 一
() 5
向上 ,滚道与承受最 大载荷的滚动体接 触 中心处 引起与
下面计算接触应 力相 当的静 载荷 :滚 柱式 直线 导轨 副 , 4 0 MP ;滚柱式直线导 轨副在垂 直加 载位置 ,额 定静 00 a 载荷计算公 式为 :
I 瓦 D l 2
IO TA技术委员会 起草 的 (S 178 2 S/ C IO 42 — 滚动 轴承一 直线滚动轴 承~额定静载 荷》标准 。额定 静载荷 的定义 为: 滚动体与滚道最大接触应力处 的总永久变形 量等于
滚动体直径万分 之一 时的静载荷 。实 验表 明,在 载荷方
∑I I D D =( +
=
6
2 10 ) 韩建 国 7 4 1
√ 相
1 设计原理 .
本装置 由摆动机构 、定 心机构 、连接 杆组成 ,其 中 定心 机构 由定 心 套 、轴 承 、锁 紧螺母 、定 心 支架 等组 成 ;摆动 机 构 由支 撑 板 、滑块 、摆 动板 等 组 成 ( 图 见 3 。摆动 机构 的支 撑板 中间开 一 基 准孔 ,孔 内安 装轴 ) 承 ,滑块底部装在 轴承 内,滑块 可以在基准孔 内自由转
最大接触应力 :当 =0时
d一
2Q
厂 0 与导轨副部 件的几何 形状 、许用应力 有关 ——
的系数 ,在 IO 4 2 —2标准 中,对 于滚 S 178
柱式直线导轨副 f =2 1 o 2
— —
6
Q I
应用 于额定载荷计算 的钢 球列或滚子列 的
数目
[ ]
:
滚珠丝杠负载计算
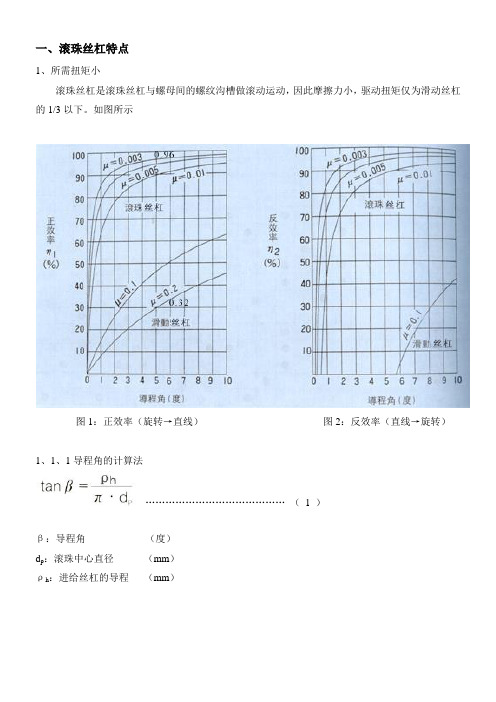
一、滚珠丝杠特点1、所需扭矩小滚珠丝杠是滚珠丝杠与螺母间的螺纹沟槽做滚动运动,因此摩擦力小,驱动扭矩仅为滑动丝杠的1/3以下。
如图所示图1:正效率(旋转→直线)图2:反效率(直线→旋转)1、1、1导程角的计算法……………………………………(1 )β:导程角(度)d p:滚珠中心直径(mm)ρh:进给丝杠的导程(mm)2扭矩计算(1)水平推力转换为驱动扭矩T:驱动扭矩Fa:导向面的摩擦阻力Fa=μ×mgμ:导向面的摩擦系数g:重力加速度(9.8m/s2)m:运送物的质量(kg )ρh:进给丝杠的导程(mm )η:进给丝杠的正效率(图1)(2)施加扭矩时产生的推力Fa:产生的推力(N )T:驱动扭矩(N mm )ρh:进给丝杠的导程(mm )η:进给丝杠的正效率(图1)T:驱动扭矩(N mm )Fa:产生的推力(N )ρh:进给丝杠的导程(mm )η:进给丝杠的正效率(图2)3驱动扭矩的计算实例用有效直径是:32mm,导程:10mm(导程角:5O41’的丝杠,运送质量为500Kg的物体,其所需的扭矩如下(1)滚珠丝杠驱动(导轨0.003,丝杠μ=0.003,效率η=0.96)导向面的摩擦阻力Fa=0.003×500×9.8=14.7N驱动扭矩(2)滑动丝杠驱动(导轨0.003,丝杠μ=0.2,效率η=0.32)导向面的摩擦阻力Fa=0.003×500×9.8=14.7N驱动扭矩4 能微量进给滚珠丝杠由于滚动运动,起动扭矩极小,不产生如滑动运动中晚出现的蠕动现象,所以能进行正确的微量进给。
图4是让滚珠丝杠每1行进给0.1μm时的移动量。
(导向面使用的是LM导轨)图4 进给0.1μm的移动量数据5 无游隙高刚性因对滚珠丝杠施加预压,使轴向间隙为0以下,从而获得高刚性。
在图5中,如往(+)方向上施加轴向负荷,工作台(+)侧位移。
反之,往(—)方向上施加轴向负荷,工作台向(—)侧位移。
滚珠丝杠副的载荷计算

1滚珠丝杠副的载荷计算⑴工作载荷F工作载荷F是指数控机床工作时,实际作用在滚珠丝杠上的轴向作用力,其数值可用下列进给作用力的实验公式计算:对于燕尾形导轨机床F=kFx+f(Fz+2Fy+W)(1)对于矩形导轨机床F=kFx+f(Fz+Fy+W) (2)对于三角形或组合导轨机床F=kFx+f(Fz+W)(3)对于钻镗主轴圆导轨机床对于滚动导轨机床F=Fx+f(Fz+W)+Fr(5)式(1)〜(5)中:Fx、Fy、Fz—x、y、z方向上的切削分力,N;Fr —密封阻力,N; V—移动部件的重量,N; M—主轴上的扭矩,N- m dz—主轴直径, mm表1f'—导轨摩擦系数;f —轴套和轴架以及主轴的键的摩擦系数;k—考虑颠覆力矩影响的实验系数。
正常情况下,k、f与f可取表1数值。
(2)最小载荷Fmin最小载荷F?min为数控机床空载时作用于滚珠丝杠的轴向载荷。
此时,Fx=Fy=Fz=Q(3)最大工作载荷F?max最大载荷F?max为机床承受最大切削力时作用于滚珠丝杠的轴向载荷。
(4)平均工作载荷Fm与平均转速nm当机床工作载荷随时间变化且此间转速不同时,式中:1,t2,…,tn分别为滚珠丝杠在转速n1,n2,…,nn下,所受轴向载荷分别是F1,F2,…, Fn时的工作时间(min)当工作载荷与转速接近正比变化且各种转速使用机会均等时,可用下式求得Fm和nmFm=(2Fmax+Fminy 3(8) nm=(nm ax+nmin)/2(9)2滚珠丝杠副主要技术参数的确定(1)导程Ph根据机床传动要求,负载大小和传动效率等因素综合考虑确定。
一般选择时,先按机床传动要求确定,其公式为:Ph> vmax/nm ax(10)式中:vmax—机床工作台最快进给速度,mm/mir; nmax-驱动电机最高转速,r/min。
在满足控制系统分辨率要求的前提下,Ph应取较大的数值。
(2)螺母选择由于数控机床对滚珠丝杠副的刚度有较高要求,故选择螺母时要注重其刚度的保证。
不同安装方式下行星滚柱丝杠副载荷分布研究

随着螺 纹 牙刚度 的减 小 , 载荷 分布 不均程度逐 渐 降低 。此外 , 滚柱 螺纹 牙个数 与螺距 对载荷 分布 的影 响很 大 , 载荷分布 不均程度 随着螺 纹牙个数 的增大或 螺距 的增 大而增 大。
中 图分类 号 : T H1 3 2 . 1
行星滚柱丝杠副 ( p l a n e t a r y r o l l e r s c r e w m e c h a —
n i s m, P R S M) 是 一种 可 以将 直 线运 动 与 旋转 运 动 相
互转 化 的 滚 动 螺 旋 传 动 装 置 。P R S M 具有 大推力、
数 。通 过设 计 时选 取 合 理 的 结构 参 数 , 有 利 于改 善
P R S M 的均 载特性 , 提高 P R S M 的承 载能 力 与寿命 。
据 H e r t z 弹性 接 触理 论 , 将 滚 柱 作 为 整体 , 建 立 了 刚 度模型 , 得 到 了载 荷分 布 与轴 向刚 度 曲线 ; J a n等 ¨ I _ 将 滚 动体 等效 成 承受 剪 应 力 的矩 形 单 元 , 建 立 了载 荷分布计 算 模 型 , 并 与有 限元解 进 行 对 比; J o n e s 等¨ 通 过 直 接 刚度 法 建 立 了 P R S M 轴 向 刚度 的 弹
其中, 丝杠 与 螺母 均为 多头 螺纹 , 梯 形牙 型 , 滚 柱为
析 了滚 柱 个 数 与 滚 柱 螺 纹 牙 个 数 对 载 荷 分 布 的影
收稿 日期 : 2 0 1 4 — 0 9 — 2 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
行星滚柱丝杠副额定静载荷计算方法对比分析
康新泓;魏沛堂;胡瑞;周鹏亮;杜雪松;朱才朝
【期刊名称】《机械传动》
【年(卷),期】2022(46)11
【摘要】行星滚柱丝杠副(Planetary roller screw mechanism,PRSM)是一种新
型重载传动装置。
额定静载荷是反映其承载能力的关键指标。
针对目前PRSM额
定静载荷计算方法不统一、计算结果差异大等问题,阐述了以滚珠丝杠、滚动轴承、屈服极限和弹塑性线性强化为基础的4种PRSM额定静载荷计算方法并建立相应
计算模型,对比分析了结构参数对4种方法所得额定静载荷的影响规律;建立了PRSM弹塑性接触有限元分析模型,对4种计算方法的准确性进行了对比验证;提出了一种基于滚动轴承标准改进的PRSM额定静载荷计算方法。
结果表明,以滚动轴承为基础的额定静载荷计算结果与有限元结果符合较好;所提出的改进计算方法,使
其计算误差平均值从17.03%降至8.90%,能够较为精确地计算PRSM的额定静载荷,为行星滚柱丝杠副的设计、选型等提供了理论支撑。
【总页数】9页(P1-9)
【作者】康新泓;魏沛堂;胡瑞;周鹏亮;杜雪松;朱才朝
【作者单位】重庆大学机械传动国家重点实验室;贵州群建精密机械有限公司
【正文语种】中文
【中图分类】TG5
【相关文献】
1.滚珠丝杠副和行星式滚柱丝杠副静刚度的比较研究
2.考虑滚柱弯曲的行星滚柱丝杠副载荷分布研究
3.考虑装配误差的行星滚柱丝杠副载荷分析与研究
4.考虑径向载荷的行星滚柱丝杠副弹塑性接触及精度损失分析
5.行星滚柱丝杠螺纹副-齿轮副同步啮合动态接触载荷特性
因版权原因,仅展示原文概要,查看原文内容请购买。