第八篇弹性力学问题一般解空间轴对称问题
弹性力学徐芝纶版第8章

移项缩写为:
2
ij
ij l j 0
2 2
考虑方向余弦关系式,有
l m n 1. 或 li li 1
求主应力
2. 求主应力 σ
将式(a)改写为:
(σ x σ )l yx m zx n 0, xy l (σ y σ )m zy n 0, xz l yz m (σ z σ )n 0。
(7 12)
⑵ 应力用应变表示,用于按位移求解方法:
E E x ( x ), yz yz 1 1 2 2(1 ) E E y ( y ), zx zx 1 1 2 2(1 ) E E z ( z ), xy xy 1 1 2 2(1 )
斜面应力
§8-2 物体内任一点的应力状态
在空间问题中,同样需要解决:由直
角坐线为 n )上的应力。
斜面应力
斜面的全应力p 可表示为两种分量形式: p沿坐标向分量:
p ( px , p y , pz ).
p沿法向和切向分量:
p (σ n , n ).
空间问题的几何方程,可以从平面问 题推广得出: 现仅考虑只有xy平面内的位移 u , v 时的 情况进行推导: 通过点P(x,y)作两正坐标向的微分线段 PA dx, PB dy,
定义
变形前位置: P, A, B,
变形后位置: P, A, B --各点的位置如图。
几何方程
u x , x
求主应力
上式是求解 l , m , n 的齐次代数方程。由于l , m , n不全为0,所以其系数行列式必须为零,得
弹性力学空间问题的解答
第八章 空间问题的解答§8-1 按位移求解空间问题将几何方程代入物理方程,得出用位移分量表示应力分量的弹性方程如下:⎪⎪⎪⎪⎪⎪⎪⎪⎭⎪⎪⎪⎪⎪⎪⎪⎪⎬⎫∂∂+∂∂+=∂∂+∂∂+=∂∂+∂∂+=∂∂-+=∂∂+-+=∂∂+-+=),()1(2)()1(2),()1(2),21(1),21(1),21(1y u x E x z u E z y E z E y E x u E xy zx yz z y x υμτωμτυωμτωθμμμσυθμμμσθμμμσ (8-1) 其中zy x u ∂∂+∂∂+∂∂=ωυθ。
再将上面的弹性方程(8-1)代入平衡微分方程(7-1),并采用记号2222222z y x ∂∂+∂∂+∂∂=∇,得到⎪⎪⎪⎭⎪⎪⎪⎬⎫=+∇+∂∂-++=+∇+∂∂-+=+∇+∂∂-+.0)211()1(2,0)211()1(2,0)211()1(2222z y x f z E f y E f u x E ωθμμυθμμθμμ (8-2) 这是用位移分量表示的平衡微分方程,也就是按位移求解空间问题时所需用的基本微分方程。
如果将工(8-1)代入式(7-5),就能把应力边界条件用位移分量来表示,但由于这样得出的方程太长,我们宁愿把应力边界条件保留为式(7-5)的形式,而理解其中的应力分量系通过式(8-1)用位移分量表示。
位移边界条件则仍然如式(7-9)所示。
§8-2 半空间体受重力及均布压力设有半空间体,密度为ρ,在水平边界上受均布压力q ,图8-1,以边界面为xy 面,z 轴铅直向下。
这样,体力分量就是g f f f z y x ρ===,0,0。
采用按位移求解。
由于对称(任一铅直平面都是对称面),试假设)(,0,0z u ωωυ===。
(a )这样就得到可见基本微分方程(8-2)中的前二式自然满足,而第三式成为 简化以后得,)1()21)(1(22μρμμω--+-=E g dz d (b ) 积分以后得 ),()1()21)(1(A z E g dz d +--+-==μρμμωθ (c ).)()1(2)21)(1(2B A z E g ++--+=μρμμω (d) 其中A 和B 是待定常数。
弹性力学-第八章 平面问题的极坐标解答

(2) 只有环向变形,无径向变形。 O
径向线段PA的相对伸长:
r2
PA PA PA
dr dr 0 dr (f)
径向线段PA的转角:
2
u
u dr r
dr
u
y
u r
d
B
B
rP
2
P
dr
u
2 A
x
A
u
(g) u
u
d
u r
dr
环向线段PB的相对伸长:
2
PB PB PB
BB PP PB
u
u d rd
xy
sin
2
x
y
2
x
y
2
cos 2
xy
sin
2
r
x
y
2
sin
2
xy
cos 2
第八章 平面问题的极坐标解答 §8.2 平面轴对称应力问题
§8.2 平面轴对称应力问题
A. 轴对称问题应力分量与协调方程
无体积力,且与θ无关.求解方法:
(1)应力分量
r
1 r
d
dr
d 2
dr 2
r 0
主 要内容
§8-1 §8-2 §8-3 §8-4 §8-5 §8-6 §8-7 §8-8 §8-9
基本方程 平面轴对称应力问题 内外壁受均布压力作用的圆筒或圆环板 匀速转动的圆盘 曲梁的纯弯曲 曲梁一端受径向集中力作用 圆孔对应力分布的影响 集中力作用于全平面 在顶端受集中力或集中力偶作用的楔形体
第八章 平面问题的极坐标解答 §8-1 基本方程
1 r
)
e2 (sin
r
cos
弹塑性力学讲义 第九章空间轴对称问题

的取值范围:由 0 1 的取值范围:0
r sin 1 a a sin
2
w
4(1 2 )q 2 2 a a 2 sin 2 0 E
a cos d a2 r 1 2 sin 2 r
4(1 2 )q a 2 cos 2 d E a2 r 1 2 sin 2 r
r R z z
当 R 时 R=(r +z ) , 应力、位移 0; 当 R 0 时,应力奇异。 Boussinesq 采取 Love 函数求解,
x
y
(r,z)为重调和函数,由(r,z)的三次微分导出应力。
选
(r,z) 为 r 和 z 的正一次幂式: (r,z) = A1R+ A2[R - zln(R+z)] ——为双调和函数 (r,z) 自然满足 4=0 。代入位移、应力计算式
其中
2 1 2 2 r r z 2 r
2
7.按位移法解 a.基本未知函数: ur 和 w
基本方程两个:
( G )
u e G( 2 u r r ) f r 0 r r
( G )
e G 2 w f z 0 z
并考虑适当的边界条件。 b. 引入 Love(拉甫、勒夫)位移函数(当无体力作用时) 对于位移法的基本方程的解可由考虑体力的一个特解加上齐次 方程的通解。 轴对称问题齐次拉梅方程的通解可以引入一个 Love 位移函数
(1 ) P (1 2 ) P w 2Gr Er
圆面积均布荷载 q 对圆外 M 点竖向位移影响可取一个微面元, 距 M 点为 s,角度为 处,dA=sdds ,dA 上 q 对 M 点影响:
弹性力学空间轴对称问题有限元法
7.1 弹性力学空间轴对称问题的描述
一、柱坐标系
由于轴对称性质,采用柱坐标系( r、θ、z ) 分析轴对称问题
w r
u z
• 尽管点的位移发生在平面内,但是,对于垂直于 平面的线元素却存在着伸缩的可能,因此,轴对 称问题的环向应变不为零。
2)几何方程
• 对于周向应变,尽管不存在周向位移,但由于A点 发生径向位移后,它与轴的距离变为,从而导致 产生周向的变形,如图所示,则产生周向应变为
(r u)d rd rd
Ke
B
eT
e
DB
dv
Ve
Fbe NeTf dv
Ve
Fqe NeT f dS Se
Fe 0
BeT0 dv
Ve
Fe 0
BeTD0 dv
Ve
Ke 2
BeT
e
DB
rdrdz
e
Fbe 2 NeTf rdrdz e
Fqe 2 NeT f rds Se
Fe 0
2
BeT0 rdrdz
u r
u
r
z
r u r w
rz
z
w
u
r z
7.1 弹性力学空间轴对称问题的描述 三、基本方程
(2)应力应变关系 —物理方程
1
1 1
0
r
σ
z rz
E 1 1 1
2
1 1
1
1
1
1
弹性力学问题的有限元法轴对称问题
drdz
Ri e
πA
6 2ri
0 rj
rm
(i, j,m)
当
rc ri rj rm, 则有
Wi
Wj
Wm
1 3
2πArc
2020/5/7
13
面积力 沿单元的jm面
q L0j q
Re
2π
A
Ni
0
0 Ni
Nj 0
0 Nj
Nm 0
0 Nm
T
L0jqrdS
z
m
q j i
r
2020/5/7
πrc A3 2A
brbs
fr fs A1 br fs frbs A1cr bs fs A2brbs
A2cr cs
(r, s i, j,m)
A1cs br fr A2crbs
crcs A2brbs
其中
A1
1
A2
1 2 2(1 )
A3
E(1 ) (1 )(1 2)
ci z
(i, j, m)
1 ri zi
面积 A 1 rj z j
1 rm zm
常数
abii
rj zm zj
rm z j zm
c j rj rm
(i, j,m)
f
u w
N
e
Ni I 2
N jI2
Nm I2 e
备注:
平面三角形单元
x, y
轴对称三角形单元
r, z
2020/5/7
4
2. 确定应力-应变、应变-位移
(i, j, m)
应变 r , z , rz是常量, 是单元中r和z的函数;
Be Bi Bj Bm e
轴对称与空间问题

上一页 下一页 返回
6.1 轴对称问题
• 整体刚度矩阵为: • 于是式(6.49)便可以写成与平面问题相同的标准形式,即: • 这就是求解得到的节点位移的平衡方程。
上一页 下一页 返回
6.1 轴对称问题
• 整体刚度矩阵也可以写成分块形式,即:
上一页
返回
6.2 四面体单元
• 工程结构一般都是立体的弹性体,当受到力的作用后,其内部各点将 沿x、y、z 坐标轴的方向产生位移,即三维空间问题,空间问题所选 用的单元形状如图6.7 所示。
上一页 下一页 返回
6.1 轴对称问题
• 即: • 其中 • 且单元内任意一点的位移与节点位移之间有如下关系:
上一页 下一页 返回
6.1 轴对称问题
• 因此有: • {δ *}e 为任意列向量,所以有: • 式(6.31)中的第一项为环单元上的集中力移置到节点的等效力,第
二项为环单元边界上的表面力移置到节点的等效力,第三项为环单元 上的体积力移置到节点的等效力。
6.2 四面体单元
• 6.2.2 四面体单元应变
• 四面体单元应变为:
• 将单元位移代入上式,得:
上一页 下一页 返回
• 其中
6.2 四面体单元
上一页 下一页 返回
6.2 四面体单元
• 6.2.3 四面体单元应力
• 为求单元应力,由四面体单元的物理方程式可得: • 则应力分量为: • 应变分量为:
• 轴对称问题的几何方程(应变与位移之间的关系)为:
上一页 下一页 返回
6.1 轴对称问题
• 写成矩阵形式为:
上一页 下一页 返回
6.1 轴对称问题
• 根据胡克定律,其应力与应变的关系为:
弹性力学轴对称问题的有限元法
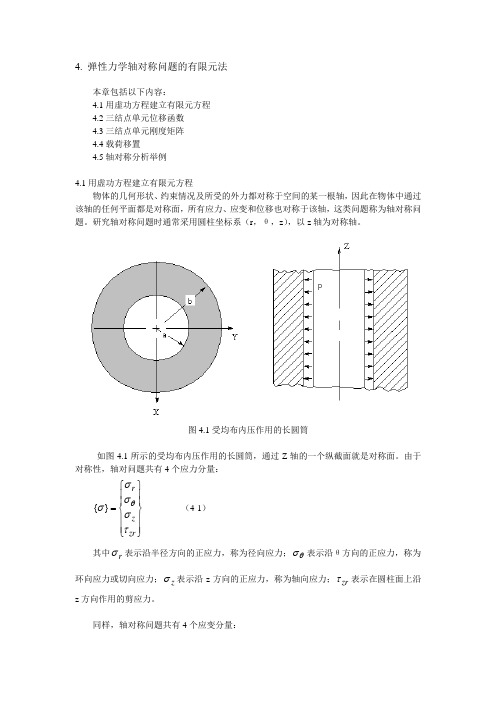
4. 弹性力学轴对称问题的有限元法本章包括以下内容:4.1用虚功方程建立有限元方程 4.2三结点单元位移函数 4.3三结点单元刚度矩阵 4.4载荷移置4.5轴对称分析举例4.1用虚功方程建立有限元方程物体的几何形状、约束情况及所受的外力都对称于空间的某一根轴,因此在物体中通过该轴的任何平面都是对称面,所有应力、应变和位移也对称于该轴,这类问题称为轴对称问题。
研究轴对称问题时通常采用圆柱坐标系(r ,θ,z ),以z 轴为对称轴。
图4.1受均布内压作用的长圆筒如图4.1所示的受均布内压作用的长圆筒,通过Z 轴的一个纵截面就是对称面。
由于对称性,轴对问题共有4个应力分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zr z r τσσσσθ}{(4-1)其中r σ表示沿半径方向的正应力,称为径向应力;θσ表示沿θ方向的正应力,称为环向应力或切向应力;z σ表示沿z 方向的正应力,称为轴向应力;zr τ表示在圆柱面上沿z 方向作用的剪应力。
同样,轴对称问题共有4个应变分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zr z r γεεεεθ}{(4-2)其中r ε表示沿半径方向的正应变,称为径向正应变;θε表示沿θ方向的正应变,称为环向正应变或切向正应变;z ε表示沿z 方向的正应变,称为轴向正应变;zr γ表示沿r 和z 方向的剪应变。
在轴对称问题中,弹性体内任意一点上,不存在切向位移,只存在径向位移u 和轴向位移w ,两个位移分量表示为,⎭⎬⎫⎩⎨⎧=w u f }{(4-3)在讨论弹性力学平面问题的有限元法时,我们先由将弹性体划分为有限个单元的组合体,由虚功方程得到单元刚度矩阵,集成后得到整体刚度矩阵。
在这里,我们用虚功方程直接得到轴对称问题的有限元列式。
由虚功方程可得,外力虚功等于内力虚功或虚应变能, ds p f dxdydz F f dxdydz T sT T }{}{}{}{}{}{***⎰⎰⎰⎰⎰⎰⎰⎰+=σε(4-4)其中{F}为体力,{p}为面力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 (y2 y2 z2)
(
G) e x
G2u
Fx
0
(
G) e y
G2v
Fy
0
(
G) e z
G2w
Fz
0
(8 1)
如物体内质点处于运动状态,式(8-1)也可写为
式(8-2) (用位移表示的)平衡(运动)微分方程的展开式为
(
G) e x
G2u )
(
G) e y
在一般求解边值问题时,按照未知量的不同有位移法与应力法,下面分别来
进行讨论。
一、位移法
ij 1 2(uij uij)
(42)
i j ( 1 ) E ( 1 2 )i j e ( 1 E )i ji je 2 G i j ( 4 6 )
x e 2G x
y
e
2G
y
z e 2 G z
w xlz)
Fy
ely
G( vxlx
yvly
vzlz)G( u ylx
yvly
w ylz)
(86)
Fx elz G(w xlx w yly w zlz)G( u zlx vzly w zlz)
由此,用位移法解弹性力学问题归结为按给定边界条件积分Lame方程。
解例求体8:以-1内设xy的为有位边半移界空和面间应,无力取限。z体轴,垂容直重向为下p。,(((在 GGG上))) 边xyezee 界GGG上222uwv 受FFFxyz均000布((( 压2t2t2tuv22w2))力)
u v w e x y z
x e 2 G x 2 u 2 G ( y 2 u 2 x 2 v y ) G ( z 2 v 2 x 2 w z ) F x 0
x e G x e G ( y 2 y 2 z 2 )u F x 0
同理,并采用Laplac算符
v y
z
e
2G
w z
xy
G
(u y
v ) x
(a )
x
x
y y
xy z
Fx
0
yx x
y y
yz z
Fy
0
zx
x
zy y
z z
Fz
0
yz
G
(v z
w y
)
ijj Fi 0(2tu2i )
(4-1)
zx
G
(u z
w x
)
再将式(a)对j取导后再代人式(4-1)得
xy
G
xy
(4 6)
x
u x
y
v y
z
w z
xy
u y
v x
(4 2 )
yz
G
yz
z x G z x
yz
v z
w y
zx
u z
w x
若以位移为基本未知量,必须将泛定方程改用位移 u i 来表示。现在来进行
推导:将式(4-2)代人式(4-6)得
x
e
2G
u x
y
e
2G
因为 Fx Fy 0 只 与 z 有 关 。 又 Fz q
(86)
其第三式为
将式(3)代入式(4)得
,再代回式(3),得
为了确定常数B,可以将无限的边界条件转化为有限的,即假定半空间体在距
平面边界h足够远处已经很小而可以忽略,即
,则由式(5)得
于是,式(3)给出的位移为
E
G E
(1)(12) 2(1 )
G2v
Fy
0(
2v t2 )
(
G) e z
G2w
Fz
0(
2w t2 )
(8 3)
当体力不计时,有
上述式(8-3)或式(8-4)称为Lame(拉梅)方程(或Lame-Navier(纳维 叶)方程)。式(8-1)、式(8-2)和式 (8-3)的推导过程是平衡方程、几 何方程及本构方程的综合,因此以位移形式表示的平衡(运动)微分 方程是弹性力学问题位移解法的基本方程。Lame方程在弹性波动
第八章 弹性力学问题一 般解·空间轴对称问题
§8-1 弹性力学问题的一般解
前面重点讨论了弹塑性力学的平面问题。关于梁的弯曲问题由于空间维度的 简化,作为平面应力问题在材料力学中比较成功地得到了解决,我们只是在 平面问题中进行了检验。
现在我们将对一般空间弹性力学问题的解法给予理论分析,并举出解法实例。
力学问题中是极为重要的理论基础。
所求问题的边界条件给定的是边界上的位移 u i u i,则可直接进行计算。
如果全部边界或部分边界上给出的是应力边界条件,ijlj Fi 就要将应力
形式的边界条件转换成为位移形式。
其方法与将应力形式的平衡方程转化为Lame方程的方法大致相同。现推导如
下:先后将式(4-6)、式(4-2)代人式(4-13)得
E
E
i j ( 1 ) ( 1 2 )i j e ( 1 )i ji je 2 G i j ( 4 6 )
ij 1 2(uij uij)
(42)
(式中
为函数 u i 沿物体表面法线n的方向导数),其展开式为
Fx
elx
G( u xlx
u yly
u zlz)G( u xlx
vxly
边界条件式(8-6)前两式自然满足,
Fx
elx
G( u xlx
u yly
u zlz)G( u xlx
xvly
w xlz)
Fy
ely
G( vxlx
yvly
vzlz)G( u ylx
yvly
w ylz)
Fz
elz
w G(xlx
w yly
w
u
z
lz)G(zlx
v zly
w
z
lz)
q,
(8 3)
体力分量 FxFy0,Fzp
面力分量在z=0处, Fx Fy 0 Fz q 如图8-1所示。
采用半逆解法。由于载荷和几何形状都对称于z 轴,则各点位移只在z向有变化。试假设
于是
而
因此由Lame方程式(8-3)的前两式知,它们成为恒等式自然满足,而第三式给出
式中A、B为积分常数。 边界上 lx ly 0 lz 1
将 2G换成 , E 来表示,则位移解答为
显然最大位移发生在边界上,由式(8-7)可知
将式(8-7)代入几何方程(4-2)求出应变,再引用式本够方程(4-6)可得应力分量解答
x y 1 ( q p z ) ,z ( q p z ) ,x y y z z x 0 ( 8 9 )
二、应力法 以应力作为基本未知量,需将泛定方程改用应力分量表示。应 力方程可由应变协调方程(4-4)和平衡微分方程(4-1),用应力应 变关系就可得到用应力表示的应变协调方程。不过也可从位移 方程,即已求得的Lame方程式(8-1)出发来推导: 第一步,先将Lame方程转变为三个正应力和的关系式,供以下 推证使用。将式(3-27)和式(3-28)代人式(8-1)得