第三章 弹性力学空间轴对称问题有限元法
空间和轴对称问题的有限单元法演示文稿

Ryp
y
p
Rzp
Rxp
x
Ryi
Rym
z
i
R zi
Rxi
Rzm m Rxm
Ryj
Rzj j Rxj
Rxi
Ryi
Rzi Rxj
Ryj
Re
Rzj
Rxm
Rym
Rzm
Rxp
Ryp
Rzp
第15页,共25页。
由集中力引起的等效节点载荷 Re N T P
由体积力引起的等效节点载荷 Re N T gdxdydz
0 Nm
uj wj
um
wm
其中形函数为 Ni r, z
Δ为截面三角形面积
1 2
ai
bir( i ,cji,zm
)
1 11
2
ri rj
zi zj
1 rm zm
ai rj zm rm z j bi z j zm ci rm rj
第21页,共25页。
5-3-4 单元的应变和应力
(i, j, m, p)
第8页,共25页。
同样,可以得到
v Nivi N jv j Nmvm N pvp w Niwi N j wj Nmwm N pwp
单元内任一点的位移可以写成如下形式:
f
Ni 0
0 Ni
0 0
Nj 0 0 Nj
0 0
Nm 0 0 Nm
0 0
Np 0 0 Np
Ni
1 6V
ai
bi x ci y
diz
1
N j 6V a j bj x c j y d j z
Nm
1 6V
am
bm x
弹性力学有限元法.ppt

2021/3/11
13
在离散体中任取一个单元,三个节点按逆时针方向顺序编
号为i,j,m。节点坐标分别表示为(xi,yi),(xj,yj), (xm,ym)。
2021/3/11
14
对于弹性力学平面问题,一个三角形单元上的每 个节点应有2个位移分量,则三角形单元共有6个自 由度: ui , vi ,u j , v j ,um , vm 。
u x
K
矩形单元:采用双线性位移模式,单元内的应力是线性
变化的。
u kx2 mx
(kx2 mx) x
3. 薄板弯曲单元和薄板单元
2021/3/11
7
4. 多面体单元
2021/3/11
8
5. 等参数单元:单元内任一点的位移与节点位移之间的关系 恰好和该点的坐标与节点坐标之间的关系相同。
任意四边形的边一般不平行于坐标轴,沿单元边的位 移将按抛物线变化,而不是线性变化。
2021/3/11
2
(2)分析单元的力学性质 列出单元节点和节点位移之间的关系式。应用几何方程和
物理方程来建立力和位移的方程式,导出单元刚度矩阵。
节点载荷和节点位移之间的关系式为:
Fe Kee
K e 为单元刚度矩阵。
(3)计算等效节点力:用等效的节点力来代替所有在单元 上的力。
2021/3/11
元位移模式。
u(x, v(x,
y) y)
Ni
(x, 0
y)
0 N j (x, y) Ni (x, y) 0
0 Nm (x, y) N j (x, y) 0
0
Nm
(
x,
y)
u Ne
2021/3/11
18
有限元法基本原理及应用第3章重庆大学龙雪峰
有限元原理及应用
第三章 弹性力学有限元法
• 3.单元分析 • 单元分析包括位移模式选择,单元力学分析两个内容。 • 位移模式也称位移函数或插值函数,在有限元位移法中是 以节点位移为基本未知量,再由这些节点位移插值得到单 元内任意一点的位移值。单元的位移模式一般采用多项式, 因为多项式计算简便,并且随着项数的增加,可以逼近任 何一段光滑的函数曲线。 • 单元力学分析 根据所选单元的节点数和单元材料性质, 应用弹性力学几何方程和物理方程得到单元刚度矩阵。由 于连续体离散化后假定力是通过节点在单元间传递的,因 此要利用插值函数把作用在单元上的体积力、面积力和集 中力按静力等效原则移到节点上。
Hale Waihona Puke 有限元原理及应用第三章 弹性力学有限元法
• 5.结果后处理和分析 • 求解线性方程组得到位移矢量后,由几何和物理关系可以 得到应变和应力。 • 由于应变(应力)来自位移的微分可能导致单元间应力不 连续,这会使应力计算误差较大,要在节点附近进行平均 化处理。 • 通过后处理还可得到位移、应变和应力的最大最小值及其 所在位臵以及主应力、主应变或其它定义的等效应力。 • 结果的输出可以应用图表、动画等各种方式。最后还要对 这些结果进行分析以指导工程设计、产品开发等等。
有限元原理及应用第三章弹性力学有限元法?如果挠度与板厚相比不再为小量如金属板当挠度如果挠度与板厚相比不再为小量如金属板当挠度ww与板厚tt的关系在范围内板的中面应变就不能忽略如图的关系在范围内板的中面应变就不能忽略如图35所示面内的两个自由度也要一并考虑所示面内的两个自由度也要一并考虑导致单元的每个节点上a四边形弯曲单元b三角形弯曲单元图34薄板弯曲单元导致单元的每个节点上就要有五个自由度此类单元一般称为薄板单元
有限元原理及应用
第三章弹性力学有限元法
3.3 单元分析
2.单元分析
K
11 rp
b a
rp(1
13r p
)
1
2
a b
r
p
(
1
1 3
r
p
)
其中:
K
12 rp
r p
1
2
r
p
K
22 rp
b a
r
p
(
1
1 3
r
p
)
1
2
a b
r p(1
1 3
r
p
)
K
21 rp
r p
a5 xy a11 xy
a6 y2 a12 y 2
i
j
l
3.3 单元分析
1. 单元的插值函数(各种多项式)
四节点矩形单元 的插值多项式
ue
v
e
a1 a7
a2 x a8 x
a3 a9
y y
a4 xy a11xy
N
i
1 (1 4
x a
)(1
y b
z
三角形环单元
O
y
x
3.2 连续体离散化
5.轴对称单元
四边形环单元
回转圆锥薄壳单元
z
O
y
x z
O
y
x
3.3 单元分析
1. 单元的插值函数(各种多项式)
m
u e
v
e
a1 a4
4 弹性力学轴对称问题的有限元法
4. 彈性力學軸對稱問題的有限元法本章包括以下內容:4.1用虛功方程建立有限元方程 4.2三結點單元位移函數 4.3三結點單元剛度矩陣 4.4載荷移置4.5軸對稱分析舉例4.1用虛功方程建立有限元方程物體的幾何形狀、約束情況及所受的外力都對稱於空間的某一根軸,因此在物體中通過該軸的任何平面都是對稱面,所有應力、應變和位移也對稱於該軸,這類問題稱為軸對稱問題。
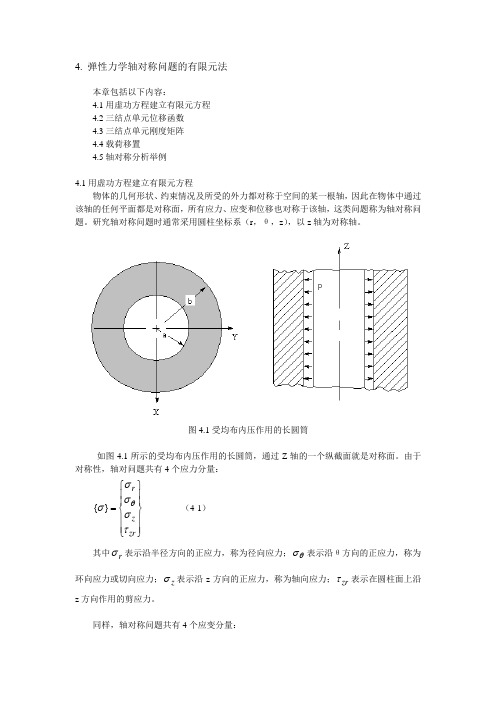
研究軸對稱問題時通常採用圓柱坐標系(r ,θ,z ),以z 軸為對稱軸。
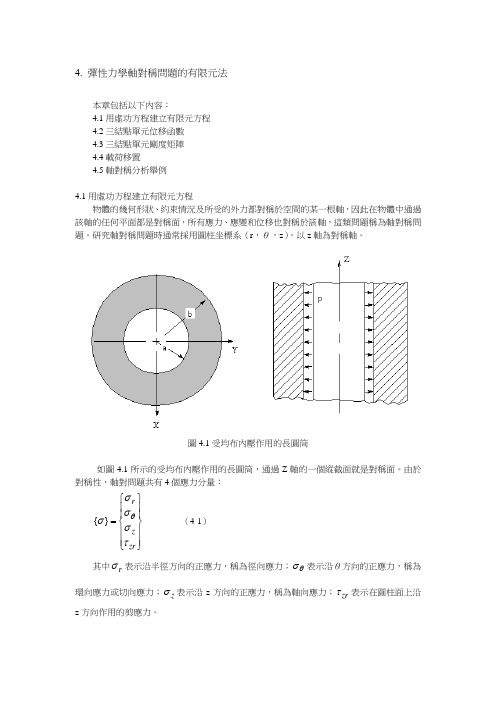
圖4.1受均布內壓作用的長圓筒如圖4.1所示的受均布內壓作用的長圓筒,通過Z 軸的一個縱截面就是對稱面。
由於對稱性,軸對問題共有4個應力分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zrz r τσσσσθ}{ (4-1)其中r σ表示沿半徑方向的正應力,稱為徑向應力;θσ表示沿θ方向的正應力,稱為環向應力或切向應力;z σ表示沿z 方向的正應力,稱為軸向應力;zr τ表示在圓柱面上沿z 方向作用的剪應力。
同樣,軸對稱問題共有4個應變分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zrz r γεεεεθ}{ (4-2)其中r ε表示沿半徑方向的正應變,稱為徑向正應變;θε表示沿θ方向的正應變,稱為環向正應變或切向正應變;z ε表示沿z 方向的正應變,稱為軸向正應變;zrγ表示沿r 和z方向的剪應變。
在軸對稱問題中,彈性體內任意一點上,不存在切向位移,只存在徑向位移u 和軸向位移w ,兩個位移分量表示為,⎭⎬⎫⎩⎨⎧=w u f }{(4-3)在討論彈性力學平面問題的有限元法時,我們先由將彈性體劃分為有限個單元的組合體,由虛功方程得到單元剛度矩陣,集成後得到整體剛度矩陣。
在這裏,我們用虛功方程直接得到軸對稱問題的有限元列式。
由虛功方程可得,外力虛功等於內力虛功或虛應變能, ds p f dxdydz F f dxdydz TsTT}{}{}{}{}{}{***⎰⎰⎰⎰⎰⎰⎰⎰+=σε(4-4)其中{F}為體力,{p}為面力。
3-弹性力学平面问题的有限元法
3 彈性力學平面問題的有限元法本章包括以下的內容:3.1彈性力學平面問題的基本方程3.2單元位移函數3.3單元載荷移置3.4單元剛度矩陣3.5單元剛度矩陣的性質與物理意義3.6整體分析3.7約束條件的處理3.8整體剛度矩陣的特點與存儲方法3.9方程組解法3.1彈性力學平面問題的基本方程彈性力學是研究彈性體在約束和外載荷作用下應力和變形分佈規律的一門學科。
在彈性力學中針對微小的單元體建立基本方程,把複雜形狀彈性體的受力和變形分析問題歸結為偏微分方程組的邊值問題。
彈性力學的基本方程包括平衡方程、幾何方程、物理方程。
彈性力學的基本假定如下:1)完全彈性,2)連續,3)均勻,4)各向同性,5)小變形。
3.1.1基本變數彈性力學中的基本變數為體力、面力、應力、位移、應變,各自的定義如下。
體力體力是分佈在物體體積內的力,例如重力和慣性力。
面力面力是分佈在物體表面上的力,例如接觸壓力、流體壓力。
應力物體受到約束和外力作用,其內部將產生內力。
物體內某一點的內力就是應力。
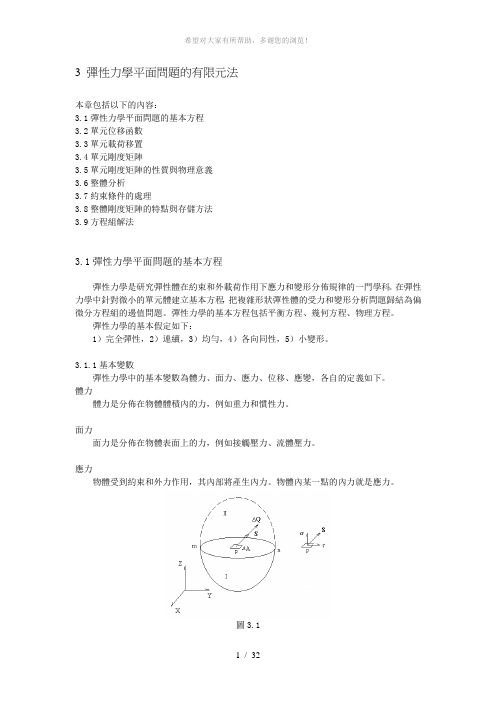
圖3.1如圖3.1假想用通過物體內任意一點p 的一個截面mn 將物理分為Ⅰ、Ⅱ兩部分。
將部分Ⅱ撇開,根據力的平衡原則,部分Ⅱ將在截面mn 上作用一定的內力。
在mn 截面上取包含p 點的微小面積A ∆,作用於A ∆面積上的內力為Q ∆。
令A ∆無限減小而趨於p 點時,Q ∆的極限S 就是物體在p 點的應力。
S A QA =∆∆→∆0lim應力S 在其作用截面上的法向分量稱為正應力,用σ表示;在作用截面上的切向分量稱為剪應力,用τ表示。
顯然,點p 在不同截面上的應力是不同的。
為分析點p 的應力狀態,即通過p 點的各個截面上的應力的大小和方向,在p 點取出的一個平行六面體,六面體的各楞邊平行於坐標軸。
圖3.2將每個上的應力分解為一個正應力和兩個剪應力,分別與三個坐標軸平行。
用六面體表面的應力分量來表示p 點的應力狀態。
應力分量的下標約定如下:第一個下標表示應力的作用面,第二個下標表示應力的作用方向。
弹性力学问题的有限元法轴对称问题
drdz
Ri e
πA
6 2ri
0 rj
rm
(i, j,m)
当
rc ri rj rm, 则有
Wi
Wj
Wm
1 3
2πArc
2020/5/7
13
面积力 沿单元的jm面
q L0j q
Re
2π
A
Ni
0
0 Ni
Nj 0
0 Nj
Nm 0
0 Nm
T
L0jqrdS
z
m
q j i
r
2020/5/7
πrc A3 2A
brbs
fr fs A1 br fs frbs A1cr bs fs A2brbs
A2cr cs
(r, s i, j,m)
A1cs br fr A2crbs
crcs A2brbs
其中
A1
1
A2
1 2 2(1 )
A3
E(1 ) (1 )(1 2)
ci z
(i, j, m)
1 ri zi
面积 A 1 rj z j
1 rm zm
常数
abii
rj zm zj
rm z j zm
c j rj rm
(i, j,m)
f
u w
N
e
Ni I 2
N jI2
Nm I2 e
备注:
平面三角形单元
x, y
轴对称三角形单元
r, z
2020/5/7
4
2. 确定应力-应变、应变-位移
(i, j, m)
应变 r , z , rz是常量, 是单元中r和z的函数;
Be Bi Bj Bm e
弹性力学轴对称问题的有限元法
4. 弹性力学轴对称问题的有限元法本章包括以下内容:4.1用虚功方程建立有限元方程 4.2三结点单元位移函数 4.3三结点单元刚度矩阵 4.4载荷移置4.5轴对称分析举例4.1用虚功方程建立有限元方程物体的几何形状、约束情况及所受的外力都对称于空间的某一根轴,因此在物体中通过该轴的任何平面都是对称面,所有应力、应变和位移也对称于该轴,这类问题称为轴对称问题。
研究轴对称问题时通常采用圆柱坐标系(r ,θ,z ),以z 轴为对称轴。
图4.1受均布内压作用的长圆筒如图4.1所示的受均布内压作用的长圆筒,通过Z 轴的一个纵截面就是对称面。
由于对称性,轴对问题共有4个应力分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zr z r τσσσσθ}{(4-1)其中r σ表示沿半径方向的正应力,称为径向应力;θσ表示沿θ方向的正应力,称为环向应力或切向应力;z σ表示沿z 方向的正应力,称为轴向应力;zr τ表示在圆柱面上沿z 方向作用的剪应力。
同样,轴对称问题共有4个应变分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zr z r γεεεεθ}{(4-2)其中r ε表示沿半径方向的正应变,称为径向正应变;θε表示沿θ方向的正应变,称为环向正应变或切向正应变;z ε表示沿z 方向的正应变,称为轴向正应变;zr γ表示沿r 和z 方向的剪应变。
在轴对称问题中,弹性体内任意一点上,不存在切向位移,只存在径向位移u 和轴向位移w ,两个位移分量表示为,⎭⎬⎫⎩⎨⎧=w u f }{(4-3)在讨论弹性力学平面问题的有限元法时,我们先由将弹性体划分为有限个单元的组合体,由虚功方程得到单元刚度矩阵,集成后得到整体刚度矩阵。
在这里,我们用虚功方程直接得到轴对称问题的有限元列式。
由虚功方程可得,外力虚功等于内力虚功或虚应变能, ds p f dxdydz F f dxdydz T sT T }{}{}{}{}{}{***⎰⎰⎰⎰⎰⎰⎰⎰+=σε(4-4)其中{F}为体力,{p}为面力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
e Fσ0 = −2π ∫ BeT σ0 rdrdz Ωe
Fεe0 =
BeT Dε 0 dv ∫
Ve
Fεe0 = 2π ∫ BeT Dε0 rdrdz
Ωe
3.2 三结点环状单元分析
承受内压:1.0e8 Pa
R1=0.3 R2=0.5
受均匀内压的球体计算分析模型
受均匀内压的球体有限元模型
3.2 三结点环状单元分析
0 e δ e Nm
3.2 三结点环状单元分析
二、单元内的应变
∂ ∂r εr 1 ε r εe = θ = εz 0 γ rz ∂ ∂z 0 0 e Ni ∂ 0 ∂z ∂ ∂r 0 N ie N ej 0 0 N ej Ne m 0 0 e δ e Nm
w = α 4 + α5 r + α 6 z
1 α3 r α6 z
Ne j 0 0 Ne m Ne 0 j ui w i 0 uj Ne w j m um w m
a i = rjz m − rm z j bi = z j − z m ci = rm − rj
r uuuuu i, j, m轮换 suuuu u
3.2 三结点环状单元分析
二、单元内的应变
∂u ∂ ∂r ∂r εr u 1 ε r r ε = θ = = ε z ∂w 0 ε rz ∂z ∂u ∂w ∂ + ∂r ∂z ∂z 0 0 u = Lu ∂ w ∂z ∂ ∂r
3.1 弹性力学空间轴对称问题的描述 一、柱坐标系 由于轴对称性质,采用柱坐标系( 由于轴对称性质,采用柱坐标系( r、θ、z ) 柱坐标系 分析轴对称问题
θ
r
x r cos θ y = r sin θ z z
3.1 弹性力学空间轴对称问题的描述 a:通过对称轴的任一平面 a:通过对称轴的任一平面 都是对称平面 b:子午面— b:子午面—通过对称轴的 子午面 任一平面( 平面) 任一平面(r-z平面) c: 如果以对称轴为z轴, 如果以对称轴为z 则位移、应变、 则位移、应变、应力都仅 的函数而与θ 为r、z的函数而与θ无关 空间的三维问题化为平面的二维问题, 空间的三维问题化为平面的二维问题,即 空间域回转体简化为定义在回转体的某个 子午面平面域上的物体。 子午面平面域上的物体。
a i + b i r + ci z N = 2A
e i
uuuuu r i, j, m suuuu u
∂Nie bi ∂Nie c = 、 = i ∂r 2A ∂z 2A
a i + b i r + ci z fi = r
uuuuu r i, j, m suuuuu u
3.2 三结点环状单元分析
二、单元内的应变
α2 α5
0 Nie
3.2 三结点环状单元分析
e u Ni ue = = w 0 e
0 Nie
Ne j 0
0 Ne m Ne 0 j
ui w i 0 uj Ne w j m um w m
dS = rdθds
上式先对θ积分,化为在子午面上的以下积分
2π ∫ u ∗ frd Ω + 2π ∫ u ∗ trds = 2π ∫ ε ∗ σrd Ω
T T T Ω sσ Ω
在位移中求解时,虚功方程等价于力边界条件与平衡微分 在位移中求解时, 方程。 方程。
3.1 弹性力学空间轴对称问题的描述 六、总势能[泛函] 总势能[泛函]
(E是杨氏模量, 为泊松比) (E是杨氏模量,μ为泊松比) 是杨氏模量
3.1 弹性力学空间轴对称问题的描述 (10个未知函数在域内的控制方程 个未知函数在域内的控制方程) 三、基本方程 (10个未知函数在域内的控制方程)
∂σ r ∂τ zr σ r − σ θ + + + ∂r ∂z r ∂σ z ∂τ rz τ rz + + + fz ∂z ∂r r
ε = (εr
(3)应力 (3)应力
εθ
εz
γ rz )
T
γθr = γθz = 0
σ = [σ r σ θ
σ z τ rz ]
T
τ θr =τ θz= 0
3.1 弹性力学空间轴对称问题的描述 三、基本方程 (1)平衡微分方程 设微元体上作用有体力 f = ( f r
f z )T
∂σ r ∂τ zr σ r − σ θ + + + f r = 0 ∂r ∂z r ∂σ z ∂τ rz τ rz + + + fz = 0 ∂z ∂r r
∂ ∂r 1 r L= 0 ∂ ∂z
0 0 ∂ ∂z ∂ ∂r
有ε θ
u = ,即轴对称的径向位移会引起环向应变 r
3.1 弹性力学空间轴对称问题的描述 三、基本方程 (2)应力应变关系 —物理方程
µ µ 1 0 1− µ 1− µ µ σ r µ εr 1 0 σ 1− µ ε 1− µ E (1 − µ ) θ θ ≡ Dε σ= = µ εz σ z (1 + µ )(1 − 2µ ) µ 1 0 1− µ 1− µ τ rz γ rz 1 − 2µ 0 0 0 2 (1 − µ ) 1 A1 A1 0 A 1 A1 0 1 E (1 − µ ) µ 1 − 2µ D = A3 A1 A1 1 0 A1 = 1 − µ ; A 2 = 2 1 − µ ; A 3 = 1 + µ 1 − 2µ ( ) ( )( ) 0 0 A2 0
bi f 1 i e ε = 2A 0 ci = B ie B ej 0 0 ci bi bj fj 0 cj 0 0 cj bj bm fm 0 cm 0 0 e δ cm a i + b i r + ci z fi = bm r
uuuuu r i, j, m suuuuu u
f r、 z 表面力分量 l是边界外法线与 f 表面力分量, 是边界外法线与
夹角的余弦, r 夹角的余弦,
夹角的余弦, n是边界外法线与 k 夹角的余弦,
3.1 弹性力学空间轴对称问题的描述 五、虚功方程
u*T fdv + ∫ u*T tdS = ∫ ε*T σdv ∫
V sσ V
因为: dv = rdrdθdz
∂ ∂r εr 1 ε θ r e ε = = εz 0 γ rz ∂ ∂z
0 0 e Ni ∂ 0 ∂z ∂ ∂r
0 N ie
N ej 0
0 N ej
Ne m 0
bi f 1 i e e 为单元应变转换矩阵, B 为单元应变转换矩阵,子块 Bi = 2A 0 环状三角形单元不是常应变单元 ci
1 T Π = ∫ ε σdv − ∫ uT fdv − ∫ uT fdS 2 V V Sσ
Π P = π ∫ ε Dεrd Ω − 2π ∫ f urd Ω − 2π ∫ t urds
T T Ω Ω sσ
T
对稳定的线弹性体的平衡而言, 对稳定的线弹性体的平衡而言,真解使 Π P 取最小值, 取最小值,至少是取驻值。
1 σr µ E (1− µ ) 1− µ σθ σ= = σ z (1+ µ )(1− 2µ ) µ 1− µ τ rz 0
∂u ∂ ∂r ∂r εr u 1 f r = 0 ε ε= θ = r = r ε z ∂w =0 0 ε rz ∂z ∂u ∂w ∂ + µ µ ∂z ∂r ∂z 0 1− µ 1− µ µ εr 1 0 1− µ ε θ ≡ Dε µ ε z 1 0 1− µ γ rz 1− 2µ 0 0 2(1− µ )
3.1 弹性力学空间轴对称问题的描述 三、基本方程 (2)应变与位移的关系—几何方程 应变与位移的关系—
∂u ∂ ∂r ∂r εr u 1 ε r θ r ε= = = ε z ∂w 0 γ rz ∂z ∂u ∂w ∂ + ∂z ∂r ∂z 0 0 u = Lu ∂ w ∂z ∂ ∂r
3.1 弹性力学空间轴对称问题的描述 二、基本变量
u(r, z) 或 u r (1)位移矢量 (1)位移矢量 u = = w(r, z) u z
即在子午面(rz面 环向位移 uθ=0 即在子午面(rz面) 上的点无离面位移。 上的点无离面位移。
(2)应变 (2)应变
3.2 三结点环状单元分析
单元结点的位移列阵记为 单元结点的位移列阵记
δ = ( ui
e
wi
uj
wj
um
wm )
T
一、单元位移模式
u = α1 + α 2 r + α3 z
u α1 u= = w α4
e
e u Ni ue = = w 0 e
K =
e
∫B
Ve
eT