基于AT89S52单片机的电机控制C语言程序设计
基于at89s52单片机的电机控制系统设计

基于AT89S52单片机的电机控制系统设计介绍在现代工业领域,电机控制系统是至关重要的一部分。
无论是在生产线上运输原材料,还是在汽车中驱动发动机,都需要一个可靠且精确的电机控制系统。
本文将介绍基于AT89S52单片机的电机控制系统设计,以及如何利用该系统进行电机控制。
AT89S52单片机简介AT89S52是一款由Atmel公司生产的8位单片机。
它基于MCS-51系列体系结构,并且配备了丰富的外设。
这使得它成为设计和开发嵌入式系统的优秀选择之一。
电机控制系统设计概述电机控制系统设计的目标是实现对电机的精确控制。
这需要一个可编程的控制器,如AT89S52单片机,以及一组传感器和执行器。
在本设计中,我们将使用脉冲宽度调制(PWM)技术来控制电机的转速和方向。
系统设计本部分将深入探讨如何设计基于AT89S52单片机的电机控制系统。
硬件设计电机控制系统的硬件设计需要考虑以下几个方面:电机驱动电路电机驱动电路是控制电机转速和方向的关键组成部分。
在本设计中,我们将使用L298N电机驱动模块。
它具有低电压驱动能力,可以提供高电压和高电流,非常适合控制各种电机。
AT89S52单片机连接AT89S52单片机将连接到电机驱动电路。
它将负责生成PWM信号来控制电机的转速和方向。
此外,单片机还将读取传感器数据,并相应地调整电机控制信号。
软件设计电机控制系统的软件设计需要考虑以下几个方面:编写控制程序需要编写控制程序来实现电机控制。
可以使用C语言或汇编语言编写程序,并使用适当的编译器将其编译为可在AT89S52单片机上运行的机器码。
确定PWM参数为了实现对电机的精确控制,需要确定PWM的参数。
这包括占空比、频率等。
可以根据电机的规格和性能需求进行调整。
传感器数据处理在电机控制过程中,传感器将提供有关电机状态的信息。
单片机将读取这些传感器数据,并根据需要调整控制信号。
因此,需要编写适当的代码来处理传感器数据。
系统实现与测试在完成电机控制系统的设计后,需要进行系统实现和测试,以确保其正常工作。
基于AT89S52单片机的步进电动机控制模块设计
基于AT89S52单片机的步进电动机控制模块设计文章设计了一种步进电动机控制系统,使用AT89S52单片机控制2相步进电机,由单片机产生驱动脉冲信号,通过按键控制步进电机的启停和步进方向,可根据实际需要对单片机进行编程,并通过Proteus仿真软件对系统进行仿真和测试。
标签:AT89S52单片机;步进电动机;控制引言步进电动机是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。
步进电动机实际上是一种单相或多相同步电动机。
单相步进电动机由单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。
多相步进电动机由多相方波脉冲驱动,在经功率放大后分别送入步进电动机各相绕组。
当向脉冲分配器输入一个脉冲时,电动机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。
在非超载的情况下,电动机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电动机加一个脉冲信号,电动机则转过一个步距角。
这一线性关系的存在,加上步进电动机只有周期性的误差而无累计误差等特点,使得在速度、位置等控制领域用步进电动机来控制变得非常简单。
本研究利用AT89S52单片机的四路I/O通道实现环形脉冲的分配,控制步进电动机匀速、连续的按固定方向转动,通过按键控制步进电动机的旋转角度。
1 系统设计用AT89S52单片机来作为整个步进电动机控制系统的核心部件,其系统设计总框图如图1所示。
真个系统包括单片机最小系统、电机驱动模块、独立按键模块等。
图1 系统设计总体框图1.1 单片机最小系统单片机最小系统主要负责产生控制步进电动机转动的脉冲,通过单片机的软件编程代替环形脉冲分配器输出控制步进电机的脉冲信号,步进电机转动的角度大小与单片机输出的脉冲数成正比,步进电机转动的速度与输出的脉冲频率成正比,而步进电机转动的方向与输出的脉冲顺序有关。
1.2 电机驱动模块电机驱动模块负责将单片机发给步进电机的信号功率放大,从而驱动电机工作。
基于AT89S52单片机直流电机调速系统的设计

基于AT89S52单片机直流电机调速系统的设计一、本文概述Overview of this article随着现代控制技术的不断发展,直流电机调速系统在许多工业和生活领域中的应用越来越广泛。
其中,基于AT89S52单片机的直流电机调速系统因其设计灵活、成本低廉、性能稳定等优点,受到广大工程师和研究人员的青睐。
本文旨在探讨基于AT89S52单片机的直流电机调速系统的设计思路、实现方法以及性能优化,以期为读者提供一套可靠、高效的电机调速解决方案。
With the continuous development of modern control technology, the application of DC motor speed control systems is becoming increasingly widespread in many industrial and living fields. Among them, the DC motor speed control system based on AT89S52 microcontroller is favored by engineers and researchers due to its flexible design, low cost, and stable performance. This article aims to explore the design ideas, implementation methods, and performance optimization of a DC motor speed control system based on the AT89S52 microcontroller,in order to provide readers with a reliable and efficient motor speed control solution.文章首先介绍了AT89S52单片机的特点及其在直流电机调速系统中的应用价值。
基于at89s52单片机的电机控制系统设计

基于at89s52单片机的电机控制系统设计电机控制系统是现代工业中不可或缺的一部分,它可以控制电机的转速、方向和停止等功能。
本文将介绍基于at89s52单片机的电机控制系统设计。
一、系统设计方案本系统采用at89s52单片机作为控制核心,通过控制电机的转速和方向来实现对电机的控制。
具体方案如下:1.硬件设计本系统的硬件设计包括电机驱动电路、at89s52单片机控制电路和电源电路。
电机驱动电路采用L298N芯片,它可以实现电机的正反转和调速功能。
at89s52单片机控制电路包括晶振电路、复位电路、ISP下载电路和串口通信电路。
电源电路采用稳压电源,保证系统的稳定性。
2.软件设计本系统的软件设计主要包括程序设计和算法设计。
程序设计采用C语言编写,主要实现电机控制、数据采集和通信等功能。
算法设计主要包括PID算法和PWM调速算法,通过对电机的转速进行控制,实现对电机的精确控制。
二、系统实现过程1.硬件实现首先,根据电机的参数选择合适的L298N芯片,设计电机驱动电路。
然后,根据at89s52单片机的引脚功能,设计控制电路。
最后,根据系统的功率需求,设计合适的电源电路。
2.软件实现首先,编写程序实现对电机的控制。
然后,采用PID算法和PWM调速算法,对电机的转速进行控制。
最后,实现数据采集和通信功能,将数据传输到上位机进行处理。
三、系统测试结果经过测试,本系统可以实现对电机的正反转和调速功能,控制精度高,稳定性好。
同时,数据采集和通信功能也得到了良好的实现。
四、系统应用前景本系统可以广泛应用于各种电机控制领域,如机器人、自动化生产线、电动车等。
同时,随着科技的不断发展,本系统的应用前景也将越来越广泛。
总之,基于at89s52单片机的电机控制系统设计是一项非常有前途的技术,它可以为现代工业的发展提供强有力的支持。
基于AT89S52单片机的电机控制C语言程序设计
while(m--)
{for(n=0;n<25;n++)
{ ;}
}
}
void timer0()interrupt 1 //T0定时器中断
{TH0=(65536-1000)/256;
TL0=(65536-1000)%256; //重装T0
N++;
n=N%10;
if(n<high) //PWM波形生成
第一章:设计任务
任务:了解电机的转动原理,能够对直流电机进行简单的控制;能够设计和使用简单的自动化闭环系统;提高多模块硬软件的综合应用能力。
功能主要包括:
1)直流电机的正转;
2)直流电机的反转;
3)直流电机的加速;
4)直流电机的减速;
5)直流电机的停止;
6)直流电机的转速在数码管上显示;
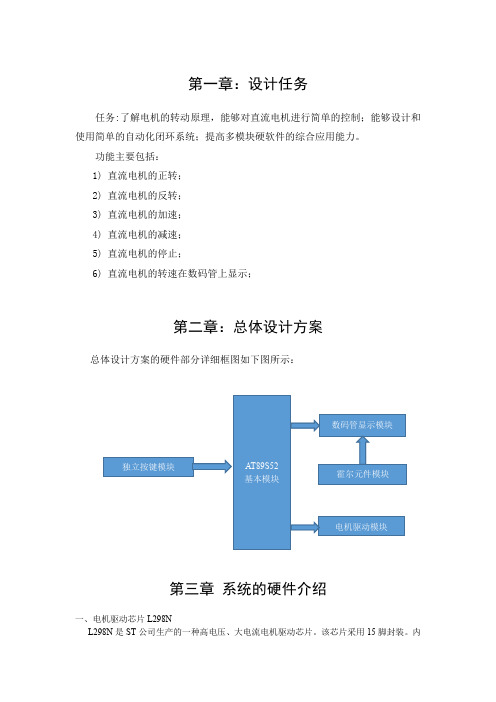
第二章:总体设计方案
{ENA=1;
}
else
{ENA=0;
}
if(N==10)
{N=0;
}
}
void shuchu()
{STCP=0;
STCP=1;
; }
void shuru(uchar a)
{uchar i;
for(i=8;i>0;i--)S=CY;
SHCP=1;
}
}
void xianshi() //速度显示子程序
TMOD=0x01; //T0方式1定时
TH0=(65536-1000)/256;
TL0=(65536-1000)%256; //周期1ms
ET0=1; //允许T0定时器中断
EA=1; //开启总中断
TR0=1; //启动定时器T0
基于AT89S52单片机直流电机调速系统的设计

基金项目:华南农业大学校长科学基金项目(2008K008);华南农业大学 2009 年度教育教学改革与研究项目(JG09123) 作者简介:茹占军(1979-),男,内蒙古托克托人,硕士,卡尔蔡司光学科技 (广州)有限公司工程师 ,研究方向为光电技术应用 ;谢家兴(1979-),男,
福建连城人,硕士,华南农业大学工程学院讲师,研究方向为光电子。
第8期
茹占军,谢家兴:基于 AT89S52 单片机直流电机调速系统的设计
·107·
3.4 测速模块 采用光电传感器测量电机的转速,在设计中,在电机转轴末
梢上安装纸卡,在纸卡上留出两个孔。 电机转轴每转一圈,发射 二极管发出的光便通过纸卡上的孔到达接收二极管, 就可在接 收二极管上产生相应的脉冲信号。 计算在 1s 内输出的脉冲信号 的个数,把计数的结果取一半,就可得到电动机的转动速度。 光 电传感器接线原理图及实物图分别如图 5 和图 6 所示。
断, 通过 P2 口低三位判断按键的键值, 并执行相应的按键程
序。 键盘模块的电路原理图如图 7 所示。
子程序设计。 其主程序设计流程框图如图 8 所示。
5 系统测试
系统硬件和软件设计完成后,对系统进行测试,电机在各 档设定转速与显示转速比较结果如表 1 所示。 由测试数据可 以看出,当转速越大时,调速的效果就越好,误差越小;相反,转 速越小时,调速效果就越差,误差较大。
图 7 键盘模块的电路原理
图 8 主程序流程
4 系统软件设计
系统程序设计主要采用 C 语言编程,整个程序设计包括: 主程序设计、键盘子程序设计、LCD 显示子程序设计以及中断
基于AT89S52单片机的电机控制系统设计

基于AT89S52单片机的电机控制系统设计电机控制在监控器材、医疗器械、电动阀门、电动窗帘、家用电器、旋转灯具等方面有着广泛的应用,因此设计一款可控性好、精度高的电机控制系统是一件十分故意义的事。
本文介绍的基于AT89S52的电机控制系统的软硬件设计,在按键的操作下对时光举行设定,控制电机的转动,对工作状态准时间举行显示。
2 设计计划解释该系统先通过按键对电机的正、反向(即顺时针、逆时针)转动时光分离设置,时光显示在上,格式为时:分:秒(通过转变程序可以挑选不同的格式)。
采纳倒计时方式,正向时光完毕,立即开头反向转动时光计时,反向时光结束,自动复原到初始设定的时光。
时光设定完成后,按下开头键,正向转动时光开头计时,电机工作指示灯闪耀,正向转动指示灯亮,同时电机正向转动;正向时光完毕,反向时光开头计时,正向转动指示灯熄灭,反向转动指示灯亮,同时电机反向转动。
按下停止键,时光停止计时,电机停止工作,工作指示灯熄灭。
系统采纳的电机为60TDY-11可逆永磁电机,其内部采纳两组绕组,用实现定向旋转,通过转变电容和电机输出引线的接法,能够牢靠地实现电机定向旋转并控制旋转方向。
3 硬件设计囫囵系统硬件结构1所示。
3.1 按键输入和控制电路设计按键输入电路采纳6个按键分离衔接到单片机的P2.0~P2.5口,作为控制信号的输入。
按下K0键,系统进入时光设定模式,延续按下K0键可以挑选对不同的时光单位举行设置,通过K1,K2键对时光举行加1或减1。
按下K3键退出时光设定模式,K4,K5键分离为启动和停止键。
电机控制电路的控制芯片采纳ATMEL公司的AT89S52,它有8 KB FLASH,256 B RAM,32位I/O口线,定时器,两个数据指针,三个16位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振准时钟电路。
其内部资源丰盛、性价比高,能够满足设计要求。
PO.O~P0.2作为三个工作指示灯的控制信号输出,需要外接上拉;P1.0~P1.2为液晶的控制信号输出;P3.0~P3.1分离是控制电机正反向转动的控制信号输出。
基于单片机AT89S52控制步进电机正反转讲述
目录第一章系统分析 (1)1.1 框图设计 ..............................................21.2 晶振电路 ..............................................2第二章硬件系统设计 (3)2.1 硬件连接图 .............................................32.2 按键功能 ........................................... - 2 -2.3 单片机AT89S52 ..................................... - 2 -2.4 驱动电路 ...............................................42.5 步进电机 (7)第三章软件系统设计 (9)3.1 软件流程图 .............................................93.2 激磁方式 ..............................................10附录 .........................................................12附件A 源程序 .......................................... (12)附件B 仿真结果 (15)参考文献 (17)致谢..........................................................18摘要能够实现步进电机控制的方式有多种,可以采用前期的模拟电路、数字电路或模拟与数字电路相结合的方式。
近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测日新月异更新。
本文介绍一种用AT89S52作为核心部件进行逻辑控制及信号产生的单片机技术和汇编语言编程设计的步进电机控制系统,步进电机背景与现状、硬件设计、软件设计及其仿真都做了详细的介绍,使我们不仅对步进电机的原理有了深入的了解,也对单片机的设计研发过程有了更加深刻的体会。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
霍尔传感器是对磁敏感的传感元件,常用于开关信号采集的有CS3020、CS3040等,这种传感器是一个3端器件,外形与三极管相似,只要接上电源、地,即可工作,输出通常是集电极开路(OC)门输出,工作电压范围宽,使用非常方便。如图1所示是CS3020的外形图,将有字面对准自己,三根引脚从左向右分别是Vcc,地,输出。
这次一周的实习让我学到了很多书本上学不到的东西,无论我们做什么事都要先考虑好,然后再付诸实践,还有就是细节决定成败,我之所以前面一直没有调试出来就是栽在这些个细节上。
最后衷心感谢老师的耐心指导和同学们的热情帮助!!!
第八
IN2=1;
num=1;
}
break;
case 1:
{ //反转
IN1=1;
IN2=0;
num=0;
}
break;
}
}
第
第七
元件型号
数量
AT89S52
1
带锁开关
1
晶振11.0592M
1
霍尔元件CS3020
1
L298N
1
IN4148
1
IN4007
12
电阻
1k
1
4k7
1
排阻
300-4
1
2k2-4
1
10k8
{uint n;
while(m--)
{for(n=0;n<25;n++)
{ ;}
}
}
void timer0()interrupt 1 //T0定时器中断
{TH0=(65536-1000)/256;
TL0=(65536-1000)%256; //重装T0
N++;
n=N%10;
if(n<high) //PWM波形生成
sbit ENA=P1^2;
sbit K1=P3^0; //正转
sbit K2=P3^1; //反转
sbit K3=P3^2; //加速
sbit K4=P3^3; //减速
sbit STCP=P2^0;
sbit SHCP=P2^1;
sbit DS=P2^2;
uchar code tab[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xA4,0x8E}; //程序存储区定义字型码表
{CY=0;
shuru(tab[high%10]);
shuru(tab[high%100/10]);
shuru(tab[high/100]);
if(num==1)
{shuru(tab[10]);
}
else
{shuru(tab[11]);
}
shuchu();
delay(100);
}
void testkey() //按键扫描程序
第一章:设计任务
任务:了解电机的转动原理,能够对直流电机进行简单的控制;能够设计和使用简单的自动化闭环系统;提高多模块硬软件的综合应用能力。
功能主要包括:
1)直流电机的正转;
2)直流电机的反转;
3)直流电机的加速;
4)直流电机的减速;
5)直流电机的停止;
6)直流电机的转速在数码管上显示;
第二章:总体设计方案
uint N=0;
uint high=5;
extern uint num=1;
extern uint n;
extern uint e=0;
void xianshi() ; //数码管显示
void testkey(); //键盘扫描
voidchuli(); //正反转处理
void main()
{ENA=1;
{if(K1==1) //正转
{delay(1);
if(K1==1)
{e=0;
chuli();
}
while(K1);
}
else if(K2==1) //反转
{
delay(1);
if(K2==1)
if(e==0)
{e=1;
chuli();
}
while(K2);
}
else if(K3==1) //加速
{delay(1);
CS3020外形图
使用霍尔传感器获得脉冲信号,其机械结构也可以做得较为简单,只要在转轴的圆周上粘上一粒磁钢,让霍尔开关靠近磁钢,就有信号输出,转轴旋转时,就会不断地产生脉冲信号输出。如果在圆周上粘上多粒磁钢,可以实现旋转一周,获得多个脉冲输出。在粘磁钢时要注意,霍尔传感器对磁场方向敏感,粘之前可以先手动接近一下传感器,如果没有信号输出,可以换一个方向再试。这种传感器不怕灰尘、油污,在工业现场应用广泛。
总体设计方案的硬件部分详细框图如下图所示:
第三章系统
一、电机驱动芯片L298N
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
特点:
1、具有信号指示;
2、转速可调;
3、抗干扰能力强;
4、具有过电压和过电流保护;
5、可单独控制两台直流电机;
6、可单独控制一台步进电机;
7、PWM脉宽平滑调速;
8、可实现正反转;
9、采用光电隔离
L298N的输入输出逻辑关系表
ENA(B)
IN1(IN3)
IN2(IN4)
电机
H
H
L
正转
H
L
H
反转
H
IN1(IN3)与IN2(IN4)电平相同
1
电容
30p
2
104
2
22uf
1
100uf
2
静态数码管SM4105
4
74HC595
4
独立按键
4ቤተ መጻሕፍቲ ባይዱ
下载口ISP-PORT
1
第八
虽然本次课程设计只有一个星期的时间,但是我之前就已经开始设计程序了,只是一直没啥进展。我也成了倒数几个没做完的一员,其实心里一直有压力,可是有时候总是力气没花到点子上,事倍功半,主要一个原因就是,我在构建整个程序框架的时候没有一个清晰的认识,结果总是达不到自己所要求的目标。这最后一天,我找了两位同学帮我一起检查程序,结果是,我的主体程序没啥问题,问题就是小小的一些细节上,比如中断打开的顺序等。
快速停止
L
X
X
停止
电机转速的控制主要是运用PWM波形输出实现。由逻辑关系表可知,我们可以用PWM波形控制ENA(B)端或者是IN1(IN3)和IN2(IN4)。
以ENA端控制为例,当输出为高电平时电机转动,输出为低电平时电机停止。由此我们可以改变高低电平的占空比,进而实现电机转速的调整。
注意:高电平和低电平的时间不能太长,否则电机不能够持续转动,启动时高电平时间也不能太短,否则电机启动较慢。
TMOD=0x01; //T0方式1定时
TH0=(65536-1000)/256;
TL0=(65536-1000)%256; //周期1ms
ET0=1; //允许T0定时器中断
EA=1; //开启总中断
TR0=1; //启动定时器T0
while(1)
{testkey();
xianshi();
}
}
void delay (uint m) //延时函数
{ENA=1;
}
else
{ENA=0;
}
if(N==10)
{N=0;
}
}
void shuchu()
{STCP=0;
STCP=1;
; }
void shuru(uchar a)
{uchar i;
for(i=8;i>0;i--)
{SHCP=0;a<<=1;
DS=CY;
SHCP=1;
}
}
void xianshi() //速度显示子程序
三、数码管显示模块:
数码管显示模块采用的是静态数码管。
第四
Y
N
第五
#include<reg51.h>#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
sbit IN1=P1^0;
sbit IN2=P1^1;
if(K3==1)
{if(high<10)
{high++;
}
}
while(K3);
}
else if(K4==1) //减速
{delay(1);
if(K4==1)
{if(high>0)
{high--;
}
}
while(K4);
}
}
void chuli()
{switch(e)
{case 0:
{IN1=0; //正转