第3章测量平差之条件平差PPT课件
测量平差基础
§1—1观测误差当对某量进行重复观测时,就会发现,这些观测值之间往往存在一些差异。
例如,对同一段距离重复丈量若干次,量得的长度通常是互有差异。
另一种情况是,如果已经知道某几个量之间应该满足某一理论关系,但当对这几个量进行观测后,也会发现实际观测结果往往不能满足应有的理论关系。
例如,从几何上知道一平面三角形三内角之和应等于180。
,但如果对这三个内角进行观测,则三内角观测值之和常常不等于180。
,而有差异。
在同一量的各观测值之间,或在各观测值与其理论上的应有值之间存在差异的现象,在测量工作中是普遍存在的。
为什么会产生这种差异呢?不难理解,这是由于观测值中包含有观测误差的缘故。
观测误差的产生,原因很多,概括起来有以下三方面:1.测量仪器测量工作通常是利用测量仪器进行的。
由于每一种仪器只具有一定限度的精密度,因而使观测值的精密度受到了一定的限制,例如,在用只刻有厘米分划的普通水准尺进行水准测量时,就难以保证在估读厘米以下的尾数时完全正确无误;同时,仪器本身也有一定的误差,例如,水准仪的视准轴不平行于水准轴,水准尺的分划误差等等。
因此,使用这样的水准仪和水准尺进行观测,就会使水准测量的结果产生误差。
同样,经纬仪、测距仪等的仪器误差也使三角测量、导线测量的结果产生误差。
2.观测者由于观测者的感觉器官的鉴别能力有一定的局限性,所以在仪器的安置、照准、读数等方面都会产生误差。
同时,观测者的工作态度和技术水平,也是对观测成果质量有直接影响的重要因素。
3.外界条件观测时所处的外界条件,如温度、湿度、风力、大气折光等因素都会对观测结果直接产生影响;同时,随着温度的高低,湿度的大小,风力的强弱以及大气折光的不同,它们对观测结果的影响也随之不同,因而在这样的客观环境下进行观测,就必然使观测的结果产生误差。
上述测量仪器、观测者、外界条件三方面的因素是引起误差的主要来源。
因此,我们把这三方面的因素综合起来称为观测条件。
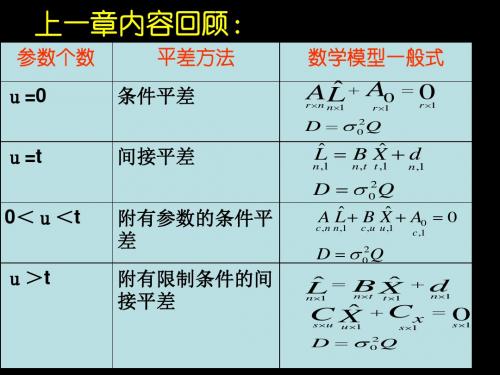
条件平差原理

§9.1 条件平差原理在条件观测平差中,以n 个观测值的平差值1ˆ⨯n L 作为未知数,列出v 个未知数的条件式,在min =PV V T 情况下,用条件极值的方法求出一组v 值,进而求出平差值。
9.1.1基础方程和它的解设某平差问题,有n 个带有相互独立的正态随机误差的观测值 ,其相应的权阵为 , 它是对角阵,改正数为 ,平差值为 。
当有r 个多余观测时,则平差值 应满足r 个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=++++=++++=++++0ˆˆˆ0ˆˆˆ0ˆˆˆ221122112211οοοr L r L r L r b L b L b L b a L a L a L a n n n n n n (9-1) 式中i a 、i b 、…i r (i =1、2、…n )——为条件方程的系数;0a 、0b 、…0r ——为条件方程的常项数以ii i v L L +=ˆ(i =1、2、…n )代入(9-1)得条件方程(9-2)式中a w 、b w 、……r w 为条件方程的闭合差,或称为条件方程的不符值,即(9-3) 令⎪⎪⎪⎪⎪⎭⎫⎝⎛=⨯n n n n r r r r b b b a a a A212121⎪⎪⎭⎪⎪⎬⎫++⋅⋅⋅++=++⋅⋅⋅++=++++=022110221102211r L r L r L r w b L b L b L b w a L a L a L a w n n n n n b n n a ⎪⎪⎭⎪⎪⎬⎫=++⋅⋅⋅++=++⋅⋅⋅++=++⋅⋅⋅++000221122112211r n n b n n a n n w v r v r v r w v b v b v b w v a v a v a ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L 211⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L ˆˆˆˆ2111⨯n L nn P ⨯1⨯n V 1ˆ⨯n L 1ˆ⨯n L则(9-1)及(9-2)上两式的矩阵表达式为0ˆ0=+A LA (9-4) 0=+W AV (9-5)上改正数条件方程式中V 的解不是唯一的解,根据最小二乘原理,在V 的无穷多组解中,取PV V T = 最小的一组解是唯一的,V 的这一组解,可用拉格朗日乘数法解出。
平差
1、什么是观测量的真值?任何观测量,客观上总存在一个能反映其真正大小的数值,这个数值称为观测量的真值。
2、什么是观测误差?观测量的真值与观测值的差称为观测误差。
3、什么是观测条件?仪器误差、观测者和外界环境的综合影响称为观测条件。
4、根据误差对观测结果的影响,观测误差可分为哪几类?根据误差对观测结果的影响,观测误差可分为系统误差和偶然误差两类。
5、在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理。
6、观测条件与观测质量之间的关系是什么?观测条件好,观测质量就高,观测条件差,观测质量就低。
7、怎样消除或削弱系统误差的影响?一是在观测过程中采取一定的措施;二是在观测结果中加入改正数。
8、测量平差的任务是什么?⑴ 求观测值的最或是值(平差值); ⑵ 评定观测值及平差值的精度。
第二章:误差理论与平差原则1、描述偶然误差分布常用的三种方法是什么? ⑴ 列表法;⑵ 绘图法;⑶ 密度函数法。
2、偶然误差具有哪些统计特性?(1) 有界性:在一定的观测条件下,误差的绝对值不会超过一定的限值。
(2) 聚中性:绝对值较小的误差比绝对值较大的误差出现的概率要大。
(3) 对称性:绝对值相等的正负误差出现的概率相等。
(4) 抵偿性:偶然误差的数学期望或偶然误差的算术平均值的极限值为0。
3、由偶然误差特性引出的两个测量依据是什么?⑴ 制定测量限差的依据;⑵ 判断系统误差(粗差)的依据。
4、什么叫精度?精度指的是误差分布的密集或离散的程度。
5、观测量的精度指标有哪些?(1) 方差与中误差; (2) 极限误差; (3) 相对误差。
6、极限误差是怎样定义的?在一定条件下,偶然误差不会超过一个界值,这个界值就是极限误差。
通常取三倍中误差为极限误差。
当观测要求较严时,也可取两倍中误差为极限误差。
7、误差传播律是用来解决什么问题的? 误差传播律是用来求观测值函数的中误差。
8、应用误差传播律的实际步骤是什么?(1) 根据具体测量问题,分析写出函数表达式),,,(21n x x x f z =; (2) 根据函数表达式写出真误差关系式n nx x fx x f x x f z ∆∂∂++∆∂∂+∆∂∂=∆ 2211; (3) 将真误差关系式转换成中误差关系式。
条件平差
得法方程: AQATK-W=0 T 1 T N AQA AP A 令 aa r .r r .nn.nn.r 则有: NaaK-W=0
法方程系数阵Naa是一个r阶的满秩方阵,且可逆
N11k1 N12k 2 N1r k r W1 0 N 21k1 N 22k 2 N 2 r k r W2 0 N r1k1 N r 2 k 2 N rn k r Wr 0
目标函数:f x min n1 x a h x min F a , x f 1k 约束条件: h x 0 k 1 n1 F a, x
0 a F a, x 0 x
L2
L4 L1 L3 L2
A
B
C
§6-2 条件方程
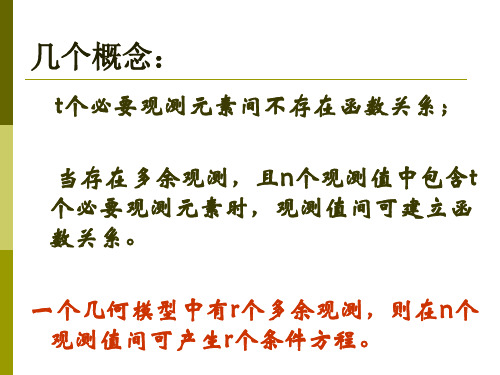
条件方程的个数等于多余观测数r。条件方程之间 不能线性相关,在一个平差问题中,条件方程的个 数是固定不变的.
一、r的确定: r=n-t 二、条件方程的列立: 原则:足数(r个),线性无关,形式简单,易 于列立
控制网常见几何模型
水准网 三角网(测角网) 三边网(测边网) GPS基线向量网 单一附合导线
由此可得联系数K的解:
r ,1
K ( AQA ) W
T
T 1
V QA K
条件平差的 最小二乘解:
n,1
ˆ L V L
三、条件平差计算步骤:
1.根据平差问题的具体情况,列出条件方程,条 件方程的个数等于多余观测数r。 2.组成法方程式,法方程的个数等于多余观测数r 3.解法方程,求出联系数K值。 4.将K代入改正数方程式,求出V值,并求出观测 值的平差值=L+V。 5.检验平差计算的正确性(可用平差值重新列出 平差值条件方程式,看其是否满足方程)。
第三章条件平差
独立三角网
自由三角网
自由测角网
附合三角网(测角)
• 例:
∆ቤተ መጻሕፍቲ ባይዱ
α ∆
当n=35、n=22、n=35+22时,其条件式个数各为多 少?有哪些类型?
图形条件(内角和条件):
B
b1
a2
c1 D c2 a1 b3 c3 a3 b2 C
A
圆周条件(水平条件):
b1
a2
c1 a1 a3 c3
c2 b2 b3
5.1.06、 5.1.07
上节内容回顾:
改正数条件式 观测值的协方差阵 法方程
AV W 0
D P Q
2 0 1 2 0
r n n n
Naa K W 0 N aa AQ AT
r r n r
改正数方程
V P A K QA K
T
1 T
wr
T
• 则条件方程可写成:
ˆA 0 AL 0
• 以及改正数条件式:
W AL A0
AV W 0
这样一来,对于一个平差问题,我们能够得到 其数学模型:
AV W 0 D P Q
2 0 1 2 0
下面要解决的问题是: 由上述的数学模型来求改正数V。
不难发现,不能求得V的唯一解!!! 解决不唯一解的办法就是附加一个约束条件---“最小二乘估计” 即满足:
极条件(边长条件):
b1 a2
c1
a1 b3 c3
c2 b2 a3
极条件(边长条件)就是指由不同路线推算得到 的同一边长的长度应相等。
三角网的基本图形 1) 单三角形 2)大地四边形
3)中点多边形。
测量程序设计_条件平差和间接平差
程序代码如下:
disp(‘-------水准网间接平差示例-------------’) disp(‘已知高程’) Ha = 5.015 % 已知点高程,单位m Hb = 6.016 % 已知点高程,单位m
A h2 D h1
C h6 E h7 B h4
h5
h3
disp(‘观测高差,单位m’)
L = [1.359; 2.009; 0.363; 1.012; 0.657; -0.357] disp(‘系数矩阵B’)
则: PV AT K
V P A K QA K
T
1 T
4、法方程: 将条件方程 AV+W=0代入到改正数方程V=QATK 中,则得到:
AQAT K W 0
r1 r1 r1
记作: 由于
N aa K W 0
rr
R( Naa ) R( AQAT ) R( A) r
Naa为满秩方阵, K Naa1W ( AQAT )1 ( AL A0 )
if H(1,1)+H(2,1)-H(3,1)+HA-HB==0 && H(2,1)H(4,1)==0 disp(‘检核正确') else disp(‘检核错误') end disp(‘平差后的高程值') HC = HA + H(1,1) HD = HA + H(1,1) + H(4,1)
二、间接平差的基本原理
其中l=L-d.
ˆ 设误差Δ和参数X的估计值分别为V 和 X
则有
ˆ V AX l
X0 为了便于计算,通常给参数估计一个充分接近的近似值
ˆ ˆ X X0 x
则误差方程表示为
水准测量及其平差
2)高差闭合差的分配和计算改正后的高差
当高差闭合差在容许范围内时,可进行高差闭合差的分
配,分配原则是:对于闭合或附合水准路线,按与路线长
度L或分配。用数学公式表示为
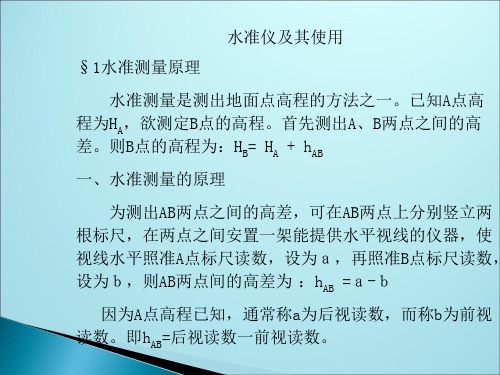
水准仪及其使用
§1水准测量原理
水准测量是测出地面点高程的方法之一。已知A点高 程为HA,欲测定B点的高程。首先测出A、B两点之间的高 差。则B点的高程为:HB= HA + hAB
一、水准测量的原理
为测出AB两点之间的高差,可在AB两点上分别竖立两 根标尺,在两点之间安置一架能提供水平视线的仪器,使 视线水平照准A点标尺读数,设为a,再照准B点标尺读数, 设为b,则AB两点间的高差为 :hAB =a-b
一、水准点
§2普通水准测量
水准测量的主要目的是测出一系列点的高程。通常称 这些点为水准点。我国水准点的高程是从青岛水准原点起 算的。
为了进一步满足工程建设和地形测图的需要,以国家 水准测量的三、四等水准点为起始点,尚需布设工程水准 测量或图根水准测量,通常统称为普通水准测量(也称等 外水准测量)。普通水准测量的精度较国家等级水准测量 低一些,水准路线的布设及水准点的密度可根据具体工程 和地形测图的要求而有较大的灵活性。
每次读数时均应使符合水准气泡严密吻合,每个转点 均应安放尺垫,但所有已知水准点和待求高程点上不能放 置尺垫。
四、水准测量成果整理
普通水准测量外业观测结束后,首先应复查与检核记录 手簿,并按水准路线布设形式进行成果整理,其内容包括: 水准路线高差闭合差计算与校核;高差闭合差的分配和计 算改正后的高差;计算各点改正后的高程。
测量平差

第0章 绪 论地球科学的测量数据或观测数据是指用一定的仪器、工具、传感器或其他手段获取的反映地球与其他实体的空间分布有关的信息数据。
任何观测数据总是包含有信息和干扰两部分,采集数据就是为了获取有用的信息。
干扰也称为误差,是除了信息以外的部分。
在实际工作中,需要进行大量观测数据的处理,它是测量工作重要环节之一。
高斯(Gauss)和勒戎德尔(Legendre)于19世纪初创立了解决这一问题的基本理论和方法,即最小二乘法。
从那时起,两个世纪以来,随着科学与技术的不断进步,特别是近代科学与技术的发展,最小二乘法也增添了许多新的内容,理论更趋全面严谨,方法更加灵活多样,应用也更为广泛。
《误差理论与测量平差》课程的任务,就是介绍这一方面的有关理论和方法。
本章将说明观测数据总是不可避免地带有误差,以及测量平差所研究的内容,最后介绍本课程的任务和内容。
§0.1 测量平差的基本概念在测量工作中,由于受测量过程中客观存在的各种因素影响,使得一切测量结果都不可避免地带有误差。
例如,对一段距离进行重复观测时,各次观测的长度总不可能完全相同。
又如,一个平面三角形三内角之和理论上应等于180°,实际上,如果对这三个内角进行观测,其三内角观测值之和一般不等于180°,而存有差异。
这种差异的产生,是因为观测值中含有观测误差。
于是,研究观测误差的内在规律,对带有误差的观测数据进行数学处理并评定其精确程度等,就成为测量工作中需要解决的重要实际问题。
一、误差来源观测误差产生的原因很多,概括起来主要有以下四个方面:观测者:由于观测者的感觉器官的鉴别能力有一定的局限性,因此在仪器的安置、照准、读数等方面都会产生误差。
同时,观测者的工作态度、技术水平以及情绪的变化,也会对观测成果的质量产生影响。
测量仪器:所谓测量仪器,是指采集数据所采用的任何工具和手段。
由于每一种仪器只具有一定限度的准确度,由此观测所得的数据必然带有误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
k a
K
r ,1
kb
k r
w a
W
r ,1
w
b
w
r
VTPV WTK
wakawbkb wrkr
b. VTPV WTK
观测值独立时
V T P V w a k a w b k b w rk r
推导如下:
VTPV VTP(P1ATK) VTATK(AV )TKWTK
纯量形式
12.11.2020 4
若取
K r,1[ka kb kr]T
12.11.2020 2
第三章 条件平差
第一节 条件平差原理
V TP V 2K T(A V W )
将 对V求导并令一阶导数为0:
A 1 P A TKW 0 法方程
d (V TP)V 2 (K TA) V 2 V TP 2 K TA 0 令: NAP 1AT
d F ˆ L ˆ f1 L ˆ L d L ˆ1 L ˆ f2 L ˆ L d L ˆ2 L ˆ fn L ˆ L d L ˆn
dV V
V
转置后:
法方程: NK W0
VTPKTA
PTVATK 法方程的解 KN1W
PVATK
改正数
VP1ATK 方程
vi p 1i (aikabikb rikr)
AV W0
基础方程
VP1ATK
12.11.2020
平差值: LˆLV
纯
aa
p
ka
ab
p
kb
ar
p
kr
wa
0
量 形
V
P1AT N 1A
P1AT N 1A0
Lˆ
E P1AT N 1A
P1
AT
N
1
A0
传播律中的K
P1AT(N1ALN1A0) P1ATN1ALP1ATN1A0
根据协因数传播律:
LˆLV
L(P1ATN1ALP1ATN1A0)
(EP1ATN1A)LP1ATN1A0
12.11.2020
QZZKQLLKT (见下页
5
第三章 条件平差
第一节 条件平差原理
二、精度评定
2. L、 W 、 K 、 V、 L ˆ的协因数阵及互协因数阵
3. 根据协因数传播律:
Q LL
Q
WL
Q ZZ
Q
KL
Q VL
Q
Lˆ
L
Q LW Q WW Q KW Q VW Q Lˆ W
Q LK Q WK Q KK Q VK Q Lˆ K
a1 a2 an
w a
A
r ,n
b1
b2
b
n
W
r ,1
w
b
r1
r2
rn
w
r
a 0
A0
r ,1
b
0
r0
则上述方程可表示为:
ALˆA0 0
函数模型
AV W0
W(AL A0) 按求函数极值的拉格朗日乘数法组成新
函数
V TP V 2K T(A V W )
K为乘系数(联系数)
Q LV Q WV Q KV Q VV Q Lˆ V
Q
L Lˆ
Q
W Lˆ
Q
K Lˆ
Q V Lˆ
Q
Lˆ Lˆ
Q
QTAQTAN1 QTAN1AQQQTAN1AQ
AQ
N
E
AQ
0
N1AQ E
N1
QTAN1AQ
QTA
QTAN1
N1AQ QTAN1AQ
0
0
QQTAN1AQ 0
0
0
QQTAN1AQ
12.11.2020 6
第三章 条件平差
第一节 条件平差原理
也可以单独求:已推导得:
L E
0
W A
A0
Z
K
N 1A
L
N
1
A0
V
P1AT N 1A
P1AT N 1A0
Lˆ
E P1AT N 1A
P1
AT
N
1
A0
求 QWW、QVL?
解: Q W ( W A ) Q L ( L A ) T A L A T L Q A 1 A T P N
QVLP1ATN1A(EP1ATN1A) P1ATN1AP1ATN1AP1ATN1A P1ATN1AP1ATN1A 0
12.11.2020 7
第三章 条件平差
二、精度评定
第一节 条件平差原理
3. 平差值函数的权倒数(协因数)
设有平差值函数: 对上式全微分得:
F ˆf(L ˆ1,L ˆ2, ,L ˆn)
第三章 条件平差
第一节 条件平差原理
二、精度评定
则上述方程可表示为:
2. L、 W 、 K 、 V、 L ˆ的协因数阵及互 协因数阵
LL
W (A L A 0) A L A 0
KN1WN1(ALA0) N1ALN1A0
V P1ATK
L E
0
W A
A0
Z
K
N 1A
ห้องสมุดไป่ตู้
L
N
1
A0
第三章 条件平差
第一节 条件平差原理
条件平差的数学模型为
函数模型: AV W0
随机模型:
D
n,n
02Q
n,n
P 2 1
0 n,n
条件平差就是在满足r个条件方程
, , , 条件下,求解满足最小二乘法(V TPV = min)的V值,在数学中就是 求函数的条件极值问题。
一、条件平差原理
条件方程
有n个观测值 L,均含有相互独立的偶 n ,1
然误差,相应的权阵为 P ,改正
数为 V ,平差值为 n ,1
表示为:
Lˆ
n ,n
,用矩阵
n ,1
12.11.2020
L1
L
n ,1
L
2
L
n
v1
V
n ,1
v
2
v
n
Lˆ
n ,1
Lˆ Lˆ
1 2
Lˆ
n
L LV
n,1 n,1 n,1
Lˆ Lˆ
1 2
L1
L
2
ab
p
ka
bb
p
kb
br
p
kr
wb
0
式
ar
p
ka
br
p
kb
rr p
k
r
wr
0
3
第三章 条件平差
第一节 条件平差原理
二、精度评定
1. 单位权中误差的计算
ˆ0
V T PV r
ˆ
2 0
V T PV r
其中 V T PV 的计算如下:
a . V T P [ p V ] v p 1 v 1 2 v p 2 v 2 2 p n v n 2
v1
v
2
Lˆ
n
L
n
vn
p1 P n,n
p2
p
n
必要 观测 数t, 多余 观测 数为r
r=n-t
a1 Lˆ1
a 2 Lˆ 2
a n Lˆ n
a0
0
b1 Lˆ1
b2 Lˆ 2
b n Lˆ n
b0
0
r1 Lˆ1 r2 Lˆ 2
rn Lˆ n
r0
0
1
第三章 条件平差
第一节 条件平差原理
改正数方程:
a1v1 a2v2 anvn wa 0 b1v1 b 2v 2 bnvn wb0 r1v1 r2v2 rnvn wr 0
,,
方程的闭合差
wa (a1L1 a2L2 anLn a0)
wb (b1L1 b2L2 bnLn b0
)
wr (r1L1 r2L2 rnLn r0)