第三章 条件平差
条件平差公式

条件平差公式
条件平差公式是一种用于对多个测量值进行分析和校正的数学方法。
其基本原理是,将所有测量值组成一个方程组,其中每个方程表示一个测量量与其他测量量之间的关系。
通过求解这个方程组,可以得到每个测量值的最优估计值和方差。
具体地说,条件平差公式可以分为两类:一类是基于观测方程的条件平差公式,另一类是基于误差方程的条件平差公式。
观测方程的条件平差公式是指,将所有测量值表示为观测方程的形式,然后通过最小二乘法求解得到最优估计值和方差。
观测方程通常表示为线性方程组的形式,即y=AX+e,其中y表示观测值,A表示系数矩阵,X表示未知数向量,e表示误差向量。
误差方程的条件平差公式是指,将所有误差表示为误差方程的形式,然后通过最小二乘法求解得到最优估计值和方差。
误差方程通常表示为非线性方程组的形式,即f(X)=e,其中f表示误差函数,X表示未知数向量,e表示误差向量。
无论是基于观测方程还是基于误差方程的条件平差公式,都具有很强的实用性和广泛的应用范围。
它们可以用于地理测量、航空测量、工程测量等领域,对于提高测量精度和减小误差具有重要意义。
- 1 -。
条件平差原理
§3-1 一、基础方程和它的解 数学模型 条件平差原理
AV W 0 W F ( L) 2 2 D 0 Q 0 P 1
V T PV min
r n n1
A V W 0
r 1
T T
1、求函数极值的拉格朗日乘数法,构造新的函数:
V PV 2 K ( AV W ) min
^
5、为了检查平差计算的正确性,常用平差值 L 重新列出平差值
条件方程式,看其是否满足方程。
^
K r1 [ka kb kr ]
T
2、求其一阶偏导数,并令其为0,得到改正数方程。
dΦ = T T 2V P 2 K A = 0 dV
T = PV A K
-1 T = V P A K = QA
T
K
V = QA
T
K
改正数方程
3、组建基础方程并解算,得到法方程。
AV -W = 0 r´ n n ´ 1 r´ 1 T V = QA K
T
}
基础方程
令:N
( AQA ) rr K r1 W 0
上式也称为法方程式
r ,r
AQAT
,有:
NK W 0
4、解算法方程,得到联系数向量K。
N AQA
r ,r
T
T T
AQAT
T R N R AQA R A r r ,r
N是一个r阶对称满秩的方阵,其逆阵N 1 是存在 1W
ˆ 5、求改正数向量 V 和平差值向量 L
V QAT K ˆ L V L
。
二、条件平差的计算步骤 1、根据平差问题的具体情况,列出条件方程式,条件方程的个数
条件平差与间接平差的相互关系
条件平差与间接平差的相互关系
一、条件平差与间接平差
1、条件平差与间接平差是指:条件平差是指基础数据是现有被观
测坐标信息,假定各点位置坐标值满足一定近似关系时(即解算中假
定有约束关系或条件,以达到所求结果的平差方法);而间接平差是指,基础数据是待测点的被观测量,包括方位量、距离量等,无任何
关系的前提条件,是一种完全无条件的平差方法。
二、条件平差
2、条件平差一般会把条件设置为两个系统中坐标值的差值最小,
这样就能够更容易地实现平差。
条件平差的典型应用是重叠法平差,
它会利用各观测值之间的内在联系,并通过设定一定的几何条件,使
其之间被观测量满足某一关系,以解决无条件方程组的平差问题。
三、间接平差
3、间接平差是指以被观测量构成的方程组,可以以各种迭代方法
求解,但是必须有一定的条件限制才能使解出的坐标值符合实际要求。
加拿大匹兹堡大学的Bloch教授认为,从下面几个原因考虑起,最好
用间接平差来解决坐标转换的问题:
(1)传统的解算序号很容易引起原点偏移和比例错误;
(2)间接平差可以很好地表示待解系统中的不确定性;
(3)使用间接平差可以很好地降低待解系统中分量精度和消隐关
系统时发生的偏差。
四、条件平差与间接平差的关系
4、条件平差与间接平差是有联系的,相互之间的联系是:可以把
条件平差看做是一种特殊的间接平差,即在无条件间接平差的基础上,再加入解算中的限制条件,以达到所求结果。
可以说,条件平差是间
接平差的分支,而间接平差是条件平差的总集合。
条件平差的基本原理

v1
V
n ,1
v2
vn
wa F1L1, L2 ,, Ln
wb F2 L1, L2 ,, Ln
wr Fr L1, L2 ,, Ln
则相应方程的矩阵表达式分别为
F Lˆ 0
AV W 0 W FL
3. 基础方程
按求函数极值的拉格朗日乘数法,设乘数
5)求观测值的平差值; Lˆ L V
6)检核。 F (Lˆ) 0
7)检核。
3. 实例分析 例6-1水准网如右图:观测值及其权矩阵如下:
L 0.023 1.114 1.142 0.078 0.099 1.216 T m
P diag1 1 1 2.5 2.5 2.5
求各水准路线的最或然值。
解: 1)列出条件方程
或
v1 v2 v3 v2
0 0 v4 4 0
v1
1 0
1 1
1 0
0 1
v2 vv43
0 4
0 0
令c=1,则由定权公式
,有 pi
C Si
1 Si
P 1
1 p1
0
0
0
0
1 p2
0
0
0
0
1 p3
0
0 s1 0 0 0 2 0 0 0
0 0
0 0
1 p4
0
K
r ,1
ka
kb
kr T
,称为联系数向量。组成函数
V T PV 2K T AV W
将 φ 对V 求一阶导数,并令其为零,得
d dV
2V T P
2KT
A
0
两边转置,得
三角网条件平差计算
§3-4 三角网条件平差计算2学时三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。
三角网按条件平差计算时,首要的问题是列出条件方程。
因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。
三角网的种类比较多,网的布设形式也比较复杂。
根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。
自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。
如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。
如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。
无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。
在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。
一、网中条件方程的个数三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。
如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。
有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。
要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数:r = n - t由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
第3讲(三角网条件平差
第三章 条件平差
第四节
二、条件方程的列立 条件方程的种类:图形条件(内角和条件)、水平条件(圆周条件)、极条件、 条件方程的种类:图形条件(内角和条件)、水平条件(圆周条件)、极条件、 )、水平条件 )、极条件 方位角条件、边长条件、坐标条件。 方位角条件、边长条件、坐标条件。 1. 图形条件(n=15 图形条件(n=15 t=8 r=7 哪7个?) 每个三角形内角平差值和等于180 每个三角形内角平差值和等于180
sin L1 sin L4 sin L7 sin L10 sin L13 sin L1 sin L4 sin L7 sin L10 sin L13 v v cot L1 1 − cot L2 2 sin L2 sin L5 sin L8 sin L11 sin L14 ρ ′′ sin L2 sin L5 sin L8 sin L11 sin L14 ρ ′′
第三章 条件平差
第四节
三角网平差的目的 求待定点平面坐标平差值, 求待定点平面坐标平差值,并进行精度 评定。 评定。 三角网件方程个数等于多余观测个数。 条件方程个数等于多余观测个数。
r=nr=n-t
测角网、测边网、边角同测网。无 关键在于确定必要观测个数 t 。 测角网、测边网、边角同测网。 论网型多么复杂, 论网型多么复杂,都是由三角形和 大地四边形相互邻接或重叠而组成。 当网中有2个或2 大地四边形相互邻接或重叠而组成。 1.当网中有2个或2个以上已知点时 t=2 t=2倍待定点数 当网中仅具备4个必要起算数据( 当网中仅具备4个必要起算数据(一点 坐标、一条边的方位、 坐标、一条边的方位、一条边的边 2.当网中少于2个已知点时 当网中少于2 长或已知两点坐标) 称为自由 长或已知两点坐标)时,称为自由 这四个数据成为必要起算数据。 网。这四个数据成为必要起算数据。 (1)测角网 t=2倍总点数t=2倍总点数-4 多余四个必要起算数据时,成为非自由 多余四个必要起算数据时,成为非自由 网。 (2)测边或边角网 t=2倍总点数t=2倍总点数-3
条件平差
得法方程: AQATK-W=0 T 1 T N AQA AP A 令 aa r .r r .nn.nn.r 则有: NaaK-W=0
法方程系数阵Naa是一个r阶的满秩方阵,且可逆
N11k1 N12k 2 N1r k r W1 0 N 21k1 N 22k 2 N 2 r k r W2 0 N r1k1 N r 2 k 2 N rn k r Wr 0
目标函数:f x min n1 x a h x min F a , x f 1k 约束条件: h x 0 k 1 n1 F a, x
0 a F a, x 0 x
L2
L4 L1 L3 L2
A
B
C
§6-2 条件方程
条件方程的个数等于多余观测数r。条件方程之间 不能线性相关,在一个平差问题中,条件方程的个 数是固定不变的.
一、r的确定: r=n-t 二、条件方程的列立: 原则:足数(r个),线性无关,形式简单,易 于列立
控制网常见几何模型
水准网 三角网(测角网) 三边网(测边网) GPS基线向量网 单一附合导线
由此可得联系数K的解:
r ,1
K ( AQA ) W
T
T 1
V QA K
条件平差的 最小二乘解:
n,1
ˆ L V L
三、条件平差计算步骤:
1.根据平差问题的具体情况,列出条件方程,条 件方程的个数等于多余观测数r。 2.组成法方程式,法方程的个数等于多余观测数r 3.解法方程,求出联系数K值。 4.将K代入改正数方程式,求出V值,并求出观测 值的平差值=L+V。 5.检验平差计算的正确性(可用平差值重新列出 平差值条件方程式,看其是否满足方程)。
第三章条件平差
独立三角网
自由三角网
自由测角网
附合三角网(测角)
• 例:
∆ቤተ መጻሕፍቲ ባይዱ
α ∆
当n=35、n=22、n=35+22时,其条件式个数各为多 少?有哪些类型?
图形条件(内角和条件):
B
b1
a2
c1 D c2 a1 b3 c3 a3 b2 C
A
圆周条件(水平条件):
b1
a2
c1 a1 a3 c3
c2 b2 b3
5.1.06、 5.1.07
上节内容回顾:
改正数条件式 观测值的协方差阵 法方程
AV W 0
D P Q
2 0 1 2 0
r n n n
Naa K W 0 N aa AQ AT
r r n r
改正数方程
V P A K QA K
T
1 T
wr
T
• 则条件方程可写成:
ˆA 0 AL 0
• 以及改正数条件式:
W AL A0
AV W 0
这样一来,对于一个平差问题,我们能够得到 其数学模型:
AV W 0 D P Q
2 0 1 2 0
下面要解决的问题是: 由上述的数学模型来求改正数V。
不难发现,不能求得V的唯一解!!! 解决不唯一解的办法就是附加一个约束条件---“最小二乘估计” 即满足:
极条件(边长条件):
b1 a2
c1
a1 b3 c3
c2 b2 a3
极条件(边长条件)就是指由不同路线推算得到 的同一边长的长度应相等。
三角网的基本图形 1) 单三角形 2)大地四边形
3)中点多边形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V P 1 AT K P 1 AT ( N 1 AL N 1 A0 ) P 1 AT N 1 AL P 1 AT N 1 A0
ˆ L L V L ( P 1 AT N 1 AL P 1 AT N 1 A0 ) ( E P 1 AT N 1 A) L P 1 AT N 1 A0
上式两边左乘法方程系数阵N的逆阵N – 1,得 联系数K的唯一解: K N W 代入前式,可计算出V,再将V代入,即可计算出 ˆ 所求的观测值的最或然值。 L L V
1
精 度 评 定
ˆ 精度评定包括单位权方差 02 和单位权中
误差
ˆ 0
的计算、平差值函Βιβλιοθήκη (Fˆ F f (L)
条件平差的计算步骤
(1)根据实际问题,确定出总观测值的个数n、必要观测 值的个数t及多余观测个数r = n - t,进一步列出最或是值 条件方程或改正数条件方程; (2)组成法方程式; (3)计算出联系数K; (4)计算出观测值改正数V;并计算出观测值的平差值; (5)计算单位权方差和单位权中误差; (6)列出平差值函数关系式,并对其全微分,求出其线 性函数的系数阵f,计算出平差值函数的协因数QFF ,计 算出平差值函数的协方差DFF。
ˆ 02
T
r
ˆ 0
T
r
式中r为多余观测值个数,r = n – t。
协 因 数 阵
条件平差的基本向量L、W、K、V、都可以表达成 随机向量L的函数
LL
W AL A0
K N 1W N 1 ( AL A0 ) N 1 AL N 1 A0
i i a i b i r i
AP 1 AT K W 0
此式称为联系数法方程(简称法方程)。
条件平差原理
取法方程的系数阵 AP-1AT = N,由上式易知N阵关 于主对角线对称,得法方程表达式
NK W 0
法方程数阵N的秩 即N是一个r阶的满秩方阵,且可逆。移项得
NK W
R( N ) R( AP 1 AT ) r
上式可分别表达成矩阵形式如下
ˆ AL A0 0
AV W 0
W ( AL A0 )
条件平差原理
按求函数极值的拉格朗日乘数法,引入乘系数 K [k k k ] (联系数向量),构成函数:
T r ,1 a b r
V T PV 2 K T ( AV W )
为引入最小二乘法,将Φ 对V求一阶导数,并令其 为零 ( K T AV ) d (V T PV ) T T
协 因 数 阵
按协因数传播律,得Z的协因数阵为
ˆ L
QZZ
QLL QWL QKL QVL Q ˆ LL
QLW QWW QKW QVW Q LW ˆ
QLK QWK QKK QVK Q LK ˆ
QLV QWV QKV QVV Q LV ˆ
Q LL ˆ Q QWL ˆ AQ QKL N 1 AQ ˆ T 1 QA N AQ QVL ˆ Q QAT N 1 AQ Q LL ˆˆ
将向量L、K、V、组成列向量,并以Z表示之
L E A W K 1 L N A Z P 1 AT N 1 A V L ˆ E P 1 AT N 1 A 0 A0 1 N A0 P 1 AT N 1 A0 P 1 AT N 1 A0
进行条件平差时,首先要确定条件方程的个数。 从上节内容可知道,在一般情况下,条件方程式 的个数与多余观测的个数r相符。而要确定多余观 测个数就必须先确定必要观测个数t。 高程测量(包括三角高程测量和水准测量)的主 要目的是确定未知点的高程值。如图所示高程网 中,有2个已知高程点A、B,3个未知高程点C、D、 E和8个高差观测值。从图中可以看出,要确定3 个未知点的高程值,至少需要知道其中的3个高 差观测值(如h1、h2、h3,或h6 、h7 、h8 ,或h2、 h4 、h5 等多种选择),即必要观测个数t = 3。
n ,n
n ,1
L1 L L 2 n ,1 Ln
v1 v V 2 n ,1 vn
其中
在这n个观测值中,有t个必要观测数,多余观测 数为r。
ˆ L1 L1 ˆ L2 L2 ˆ Ln Ln
1 2 4
相对应的改正数条件方程式形式
v1 v 2 v 4 w1 0 v 2 v3 v5 w2 0 v 4 v6 v7 w3 0 v5 v7 v8 w4 0 v 2 v7 w5 0
其中
高程网条件方程的个数及条件方程式
dV V 2 V 2V P 2 K A 0
V T P KT A 得 上式两端转置,得
P T V AT K
条件平差原理
由于P是主对角线阵,则 P = P T ,得 将上式两边左乘权逆阵P – 1,得
V P 1 AT K
PV AT K
此式称为改正数方程,其纯量形式为 1 v (a k b k r k )1,2,…,n) (i = p 将上式代入,得
式中wa、wb、…、wr称为改正数条件方程的闭合差
条件平差原理
wa (a1 L1 a 2 L2 a n Ln a0 ) wb (b1 L1 b2 L2 bn Ln b0 ) wr (r1 L1 r2 L2 rn Ln r0 )
测量平差
太原理工大学测绘科学与技术系
第三章
条件平差
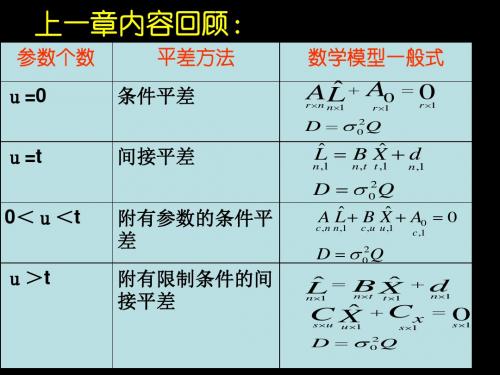
第三章
§3-1
§3-2
条件平差
条件平差原理
高程网条件平差
§3-3
§3-4
导线网条件平差计算
三角网条件平差计算
§3-5
§3-6
附有参数的条件平差
条件平差估值的统计性质
§3-1
条件平差原理
n ,1
L 设在某个测量作业中,有n个观测值 ,均含有相互 V P 独立的偶然误差,相应的权阵为 ,改正数为 , ˆ 平差值为 nL1 ,表示为 ,
§3-2
高程网条件平差
高程网包括水准网和三角高程网。对高 程网进行条件平差时,一般以已知高程 点的高程值作为起算数据,以各测段的 观测高差值作为独立观测值,写出其满 足的条件关系式,按照条件平差的原理 解算各高差值的改正数和平差值,然后 再计算出各待求点的高程平差值,并进 行精度评定。
高程网条件方程的个数及条件方程式
若取
a1 b A 1 r ,n r1
a2 an b 2 bn r2 rn
a 0 b A0 0 r ,1 r0
wa w W b r ,1 wr
平差值函数的协因数
Q LL Q QAT N 1 AQ ˆˆ
代入式得 Q f Q f f (Q QA N AQ) f 即 此式即为平差值函数式的协因数表达式。 该平差值函数的方差
T FF ˆˆ LL T T 1
QFF f T Qf f T QAT N 1 AQf
ˆ2 DFF 0 QFF
p1 P n,n
p2
v1 v2 vn
pn
ˆ L1 ˆ L ˆ L 2 n ,1 ˆ Ln
条件平差原理
可以列出r个平差值线性条件方程
a1v1 a 2 v 2 a n v n wa 0 b1v1 b2 v 2 bn v n wb 0 r1v1 r2 v 2 rn v n wr 0
式中,ai、bi、…、ri(i = 1,2,……n)为各平差值条件方 程式中的系数,a0、b0、…、r0 为各平差值条件方程式 中的常数项。相应的改正数条件方程式
ˆ ˆ ˆ a1 L1 a 2 L2 a n Ln a 0 0 ˆ ˆ ˆ b1 L1 b2 L2 bn Ln b0 0 ˆ ˆ ˆ r1 L1 r2 L2 rn Ln r0 0
)的
协因数QFF及其中误差 ˆ 的计算等。
计算单位权方差和中误差的估值
单位权中误差的计算公式为
ˆ 0 [ p] r
在一般情况下,观测值的真误差△是不知 道的,也就不可能利用上式计算单位权 中误差。但在条件平差中,可以通过观 测值的改正数V来计算单位权方差和中误 差: V PV V PV
ˆ LL
T
取全微分式的系数阵为
f f 1 , f 2 , , f n T
由协因数传播律得
Q FF f T Q LL f ˆˆ
f f , L ˆ ˆ ˆ 1 L L L2
f , , L ˆ ˆ L L n
QAT N E QAT 0
QAT N 1 QAT N 1 AQ Q QAT N 1 AQ E AQ 0 1 1 N N AQ 0 QAT N 1 QAT N 1 AQ 0 T 1 0 0 Q QA N AQ
由上式可见,平差值与闭合差W、联系数K、改 正数V是不相关的统计量,又由于它们都是服 从正态分布的向量,所以与W、K、V也是相互 独立的向量。
§3-3
导线网条件平差计算
导线网,包括单一附合导线、单一闭合 导线和结点导线网,是目前较为常用的 控制测量布设方式之一,其观测值有长 度观测值和角度观测值。
w1 (h1 h2 h4 ) w2 (h2 h3 h5 ) w3 (h4 h6 h7 ) w4 (h5 h7 h8 ) w5 (h2 h7 H A H B )