德国PS电动执行机构说明书
智能电动执行机构使用说明书
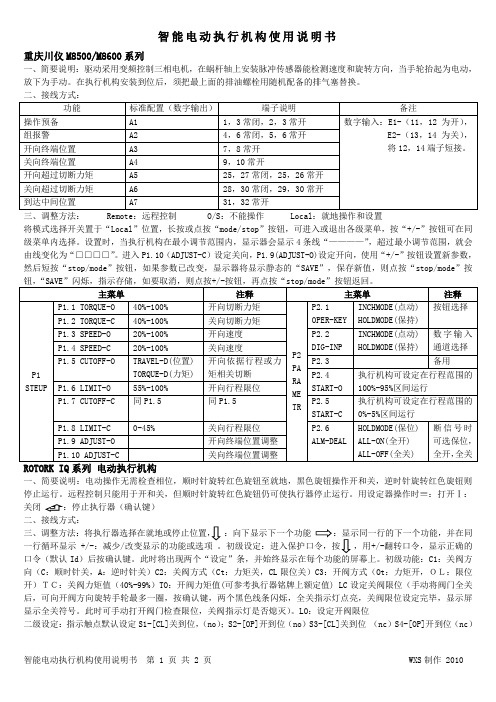
智能电动执行机构使用说明书重庆川仪M8500/M8600系列一、简要说明:驱动采用变频控制三相电机,在蜗杆轴上安装脉冲传感器能检测速度和旋转方向,当手轮抬起为电动,放下为手动。
在执行机构安装到位后,须把最上面的排油螺栓用随机配备的排气塞替换。
三、调整方法: Remote :远程控制 O/S :不能操作 Local :就地操作和设置将模式选择开关置于“Local ”位置,长按或点按“mode/stop ”按钮,可进入或退出各级菜单,按“+/-”按钮可在同级菜单内选择。
设置时,当执行机构在最小调节范围内,显示器会显示4条线“————”,超过最小调节范围,就会由线变化为“□□□□”。
进入P1.10(ADJUST-C )设定关向,P1.9(ADJUST-O)设定开向,使用“+/-”按钮设置新参数,然后短按“stop/mode ”按钮,如果参数已改变,显示器将显示静态的“SAVE ”,保存新值,则点按“stop/mode ”按钮,“SAVE ”闪烁,指示存储,如要取消,则点按+/-按钮,再点按“stop/mode ”按钮返回。
一、简要说明:电动操作无需检查相位,顺时针旋转红色旋钮至就地,黑色旋钮操作开和关,逆时针旋转红色旋钮则停止运行。
远程控制只能用于开和关,但顺时针旋转红色旋钮仍可使执行器停止运行。
用设定器操作时≡:打开Ⅰ:关闭 二、接线方式::向下显示下一个功能一行循环显示 +/-:减少/改变显示的功能或选项 。
初级设定:进入保护口令,按,用+/-翻转口令,显示正确的口令(默认Id )后按确认键。
此时将出现两个“设定”条,并始终显示在每个功能的屏幕上。
初级功能:C1:关阀方向(C :顺时针关,A :逆时针关)C2:关阀方式(Ct :力矩关,CL 限位关)C3:开阀方式(Ot :力矩开,OL:限位开)TC:关阀力矩值(40%-99%)TO :开阀力矩值(可参考执行器铭牌上额定值) LC 设定关阀限位(手动将阀门全关后,可向开阀方向旋转手轮最多一圈,按确认键,两个黑色线条闪烁,全关指示灯点亮,关阀限位设定完毕,显示屏显示全关符号。
sipos电动执行机构 专业型 调试说明书
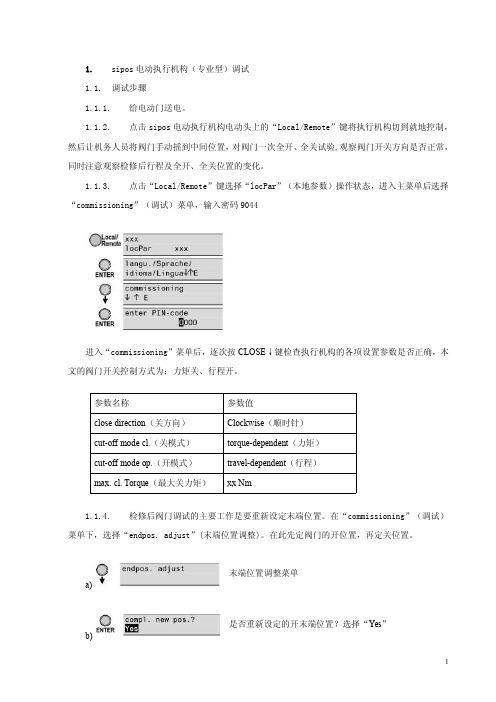
1.sipos电动执行机构(专业型)调试1.1.调试步骤1.1.1.给电动门送电。
1.1.2.点击sipos电动执行机构电动头上的“Local/Remote”键将执行机构切到就地控制,然后让机务人员将阀门手动摇到中间位置,对阀门一次全开、全关试验,观察阀门开关方向是否正常,同时注意观察检修后行程及全开、全关位置的变化。
1.1.3.点击“Local/Remote”键选择“locPar”(本地参数)操作状态,进入主菜单后选择“commissioning”(调试)菜单,输入密码9044进入“commissioning”菜单后,逐次按CLOSE↓键检查执行机构的各项设置参数是否正确,本文的阀门开关控制方式为:力矩关、行程开。
参数名称参数值close direction(关方向)Clockwise (顺时针)cut-off mode cl.(关模式)torque-dependent(力矩)cut-off mode op.(开模式)travel-dependent(行程)max.cl.Torque(最大关力矩)xx Nm1.1.4.检修后阀门调试的主要工作是要重新设定末端位置。
在“commissioning”(调试)菜单下,选择“endpos.adjust”(末端位置调整)。
在此先定阀门的开位置,再定关位置。
a)b)是否重新设定的开末端位置?选择“Yes”末端位置调整菜单c)d)e)f)g)h)i)按下CLOSE↓键并保持2s以上,执行机构将自动运行,在到达末端位置后,执行机构将朝相反的方向短暂运行,然后将再次运行至末端位置(力矩自适应过程)。
该步骤结束后让机务配合确认阀门关位置第一个确定的开末端位置显示“press E-button”代表开为行程模式显示“until TL reached”代表关为力矩模式使用OPEN↑键运行执行机构,直至阀门到达末端位置,让机务配合确认阀门开位置显示“deviation XXX”(偏差XXX),按照使得偏差逐渐较小的方向缓慢地转动中心轮(用手抓住中心论上伸出的D部分不动,转动齿轮E部分),直到显示屏中的偏差值变为“0”。
万讯电动执行机构介绍
交
流
与
答
疑
SCHIEBEL电动执行机构的特点与应用
SCHIEBEL执行机构产品范围
五大系列,多种规格
SMARTCON智能型
温度范围可选 -20℃~80℃ -40℃~60℃ 0℃~100℃ -60℃~40℃ 有增安型和隔爆型防爆执行机构 EEXDEⅡBT4 可选ON/OFF和调节两种动作模式 根据需要可以选择多种开关量信号的输入、输出
PSR(<400NM)
PS电动执行机构的特点与应用 PS执行机构特点
(1)采用高性能稀土材料电机,运行平稳可靠 (2)模块化功能,性价比高 (3)电机、伺放、阀位反馈一体化于执行机构,体积小,重量轻 (4)全部组成部分为原装产品, 采用世界名牌厂家产品 (5)机械齿轮传动 (6)PSL盘簧过度连接 (7)可以任意设置行程满足阀门要求 (8)安装位置选择方便,手柄直连 (9)PSQ直连式结构,支架连接方式配摇臂连接风门挡板
PSQ传动简单说明
①电机齿轮带动驱动齿轮; ②驱动齿轮带动太阳轮 ③太阳轮带动3个行星轮, 行星 轮同时驱动双齿轮和输出齿轮 ④双齿轮外齿连接蜗杆; ⑤行量齿轮下部驱动输出齿轮, 输出0~90; ⑥双齿轮的内齿与输出齿轮差了 3个齿 ⑦两机械限位止档
PSQ ( )
PS电动执行机构的特点与应用 PS执行机构的应用-PSQ连接(一)
SCHIEBEL电动执行机构的特点与应用
智能西贝十大特点--7.历史数据记录
数据采集器捕捉并记录存储时间数据,方便追踪历史数据。 它可记录最近的20个历史状态信息H1—H20,其中记录项中 *m*s或*h* s表示相邻两个状态所距离的时间,“ready”(准 备就绪)、“motor trip” (电源、电机故障)、“power on”(上电)、“travel fault”(运行失败)、“torque failure”(力矩故障 )等英文提示表示过去的历史状态。
OSP-E..BP 线性电动执行器带有齿形带和对开式底座说明书

33Linear Actuator with Toothed Beltand Bi-Parting CarriersSeries OSP-E..BP3435Stainless steel sealing bandThreaded holes for motor mounting (on two sides)Low friction support ringsThreaded holesPermanent magnet for position sensingSlotted profilewith dovetail groovesBelt tension adjustmentStandard carrier mountingThreadedmounting holesDrive shaftToothed beltStandard carrier mountingNipples formaintenance greasingBall bearingELECTRIC LINEAR ACTUATOR FOR SYNCHRONIZED BI-PARTING APPLICATIONSThe System ConceptA completely new generation of linear drives which can be integrated into any machine layout neatly and simply.POWERSLIDE Roller bearingprecision guidance for smooth travel and high dynamic or static loads.GUIDELINE linear guides for heavy duty applications.The dovetailed mounting rails of the new linear actuator expand its function into that of a universal system carrier.Modular system components are simply clamped on.PROLINE The compact aluminium roller guide for high loads and velocities.Install the OSP System tosimplify design work! The files are compatible with all popular CAD systems and package hardware.Data Sheet No. 1.25.001E-2Data Sheet No. 1.25.001E-3Advantages:■Precise synchronized bi-parting movements■Precise path and position control ■High speed operation ■Easy installation ■Low maintenance■Ideal for centering and door operating applicationsFeatures:■Integrated drive and guidance system ■Complete motor and control packages ■Diverse range of accessories and mountings ■Special options availableLinear Actuator with Toothed Belt and Bi-Parting CarriersNipples formaintenance greasingSTANDARD VERSIONS OSP-E..BPData sheets 1.25.002E-1, -2Standard carrier with integral guidance.Dovetail profile for mounting of accessories and the actuator itself.BASIC ACTUATOR OPTIONSDRIVE SHAFT OPTIONS MOUNTINGS FOROSP-E25 TO E50CLEVIS MOUNTINGData sheet 1.45.021ECarrier mounting for driving loadssupported by external linear guides.END CAP MOUNTINGData sheet 1.45.022EFor end-mounting of the actuatorMID-SECTION SUPPORTData sheet 1.45.023EFor supporting long actuators ormounting the actuator on the dovetailgrooves.INVERSION MOUNTINGData sheet 1.45.025EThe inversion mounting, mounted onthe carrier, transfers the driving forceto the opposite side, e.g. for dirtyenvironments..ACCESSORIESPROXIMITY SENSORSERIES RS AND ESData sheet 1.45.101EFor electrical sensing of end andintermediate carrier positions.MOTOR MOUNTINGSData sheet 1.45.028EAccessoriesOPTIONS AND ACCESSORIESData Sheet No. 1.25.001E-4A 3 P 1 5 3 E 0 0 I Z 5 0 X T e c h n i s c h e Än d e r u n g e n v o r b e h a l t en SERIES OSP-E, BI-PARTING BELT DRIVEN3637Linear Actuator withToothed Belt and Bi-Parting CarriersSeries OSP-E..BP Size 25, 32, 50A 1P 638E 00I Z 00XData Sheet No. 1.25.002E-1ORIGASYSTEMPLUSOSPT h e r i g h t t o i n t r o d u c e t e c h n i c a l m o d i f i c a t i o n s i s r e s e r v e dStandard Versions:•Standard carrier with integral guidance.•Dovetail profile for mounting of accessories and the actuator itself.Special Versions:•Position of Drive ShaftsMaintenanceAll moving parts are long-term lubricated for a normal operational environment. We recommend a check and lubrication of the linear actuator,and if necessary a change of the toothed belt and wear parts, after an operation time of 12 months ofoperation or 3 000 km, depending on the type of application.Additional greasing is easily done by using nipples in the slotted profile.Please see separate missioningThe products in this datasheet should not be operated until the machine/application in which they are used has passed necessary inspection.Installation InstructionsUse the threaded holes in the end cap for mounting the linear actuator.See if mid-section supports areneeded using the maximum allowable unsupported length graph on data sheet 1.25.002-E-3At least one end cap must be secured to prevent axial sliding when mid-section support is used.When the linear actuator is moving an externally guided load, the clevis mounting should be used (see on data sheet 1.45.021E).The linear actuators can be fitted with the standard carrier mounting facing in any direction.To prevent contamination such as fluid ingress, the actuator should be fitted with its sealing band facing downwards.The inversion mounting can be fitted to transfer the driving force to the opposite side (see on data sheet 1.45.025E).38Sizing Performance Overview Maximum LoadingsSizing of Linear ActuatorThe following steps are recommended for selection:1.Required acceleration is shown in graphs on data sheet 1.25.002E-4.2.Required torque is shown on data sheet 1.25.002E-5.3.Check that maximum values in the adjacent charts are not exceeded.4.Check max. allowable torque on drive shaft by using table T2.(Pay attention to note under table)If value is lower than required,overview the moving profile or select if possible a bigger unit.5.Before sizing and specifying the motor, the average torque must be calculated using the cycle time of the application.6.Check that the maximum allowable unsupported length is not exceeded (see on data sheet 1.25.002E-3).Data Sheet No. 1.25.002E-2Combined LoadingsIf several forces and moments are applied to the linear actuatorsimultaneously, then the following equation must be fulfilled in addition to the maximum loadings stated beside.39Size Min. Z Min. øOSP-E25BP 2438OSP-E32BP 2438OSP-E50BP3657Data Sheet No. 1.25.002E-3Maximum Allowable Unsupported Length Stroke LengthStroke LengthsThe stroke lengths of linear actuators are available in multiples of 1 mm up max. 2 x 2500 mm(OSP-E25BP: max. 2 x 1500 mm).Other stroke lengths are available on request.The end of stroke must not be used as a mechanical stop.Allow an additional safety clearance at both ends equivalent to the linear movement of one revolution of the drive shaft.The use of an AC motor with frequency converter normally requires a larger safety clearance than that required for servo systems.For advise, please contact your local HOERBIGER-ORIGA technical support department.When mechanical stops arerequired, external shock absorbers should be used (see separate catalogue).Align the centre line of the shock absorber as closely as possible with the object‘s centre of gravity.Mounting on the Drive Shaft Do not expose the drive shaftto uncontrolled axial or radial forces when mounting coupler or belt wheel,a steadying block should be used.Belt wheelsMinimum allowable number of teeth Z (AT5) at maximum applied torque.Required AccelerationDistance-Time GraphUsing the required travel distance and total time, the adjacent graphs show the required acceleration based on maximum speed.The graphs assume that acceleration and deceleration are equal.Please note that specifying non-essential high acceleration or short cycle time will result in an oversized motor.40Data Sheet No. 1.25.002E-441Data Sheet No. 1.25.002E-5Required TorqueUsing the known mass, the direction of the application and the required acceleration from the distance-time graphs, the linear actuator can be sized and the required torque is shown in the adjacent graphs.Mass in graphs = Load + movingmass of the linear actuator (according to the weight chart on data sheet 1.25.002E-1).Please note:When using an additional guide,please add the mass of the carriage to the total moving mass.42*The end of stroke must not be used as a mechanical stop.Allow an additional safetyclearance at both ends equivalent to the linear movement of one revolution of the drive shaft.The use of an AC motor with frequency converter normally requires a larger safety clearance than that required for servo systems.For advise, please contact your local HOERBIGER-ORIGAtechnical support department.Dimension KM (mm)Size KM min KM rec.251301903217023050220320Data Sheet No. 1.25.002E-6Position of Drive Shaft Position of Drive Shaft Position of Drive ShaftData Sheet No. 1.25.002E-743。
德国SIPOS电动执行器型选型手册

2006年8月版订货号:E20185-P920-B701-X-5D00© SIPOS Aktorik GmbH 2006 版权所有!电动执行机构使用说明书PROFITRON 专业型SIPOS 5 Flash增补的使用说明书E20185-P920-B705-X-5D00内容页1 总的说明 (3)1.1 安全操作说明 (3)1.2 一般的安全准则 (3)1.3 处理和回收 (3)2 运输和储存 (4)3 框图及子部件装配 (5)4 安装和连接 (6)4.1 安装在阀门上 (6)4.1.1 A型输出轴 (6)4.1.2 螺杆保护套管 (6)4.2 电气连接 (7)4.3 分体安装 (8)5 手动及远控操作 (9)5.1 手柄(轮) (9)5.2 就地操作面板 (9)5.3 远端控制 (10)5.3.1 远端操作 (10)5.3.2 参数设置和监控 (10)6 设置参数和调试 (11)6.1 调试前的准备工作 (11)6.2 调整信号齿轮单元的比率 (11)6.3 当前的状态 (12)6.4 主菜单language setting(语言设定),commissioning(调试),observing(观察),diagnosis(诊断) (12)6.5 Commissioning(调试)菜单 (13)6.5.1 设定和阀门有关的参数 (13)6.5.2 调整执行机构的行程极限(即:末端位置调整) (14)6.5.2.1 首次调整(完全设定) (14)6.5.2.2 再次调整 (16)6.5.2.3 调整机械式位置指示器 (17)6.5.3 记录力矩曲线 (18)6.5.4 设定和过程控制有关的参数 (19)6.5.5 外部模拟量速度给定 (23)6.5.6 设定速度曲线 (24)7 状态和故障信息 (26)7.1 Observing (观察)菜单(设备的状态和故障信息)..26 7.2 状态和故障信息的含义及处理方法 (28)7.3 Diagnosis (诊断)菜单 (29)8 维护 (30)8.1 检查、修正和服务 (30)8.2 重新上油脂 (31)8.3 拆卸和重装 (31)8.4 备件 (32)9 面板显示的关键词索引 (33)附录II.1 直行程线性单元的技术数据 (34)I.2 直行程关断推力与多回转关断力矩对照表 (35)I.3 直行程直线运动速度与多回转输出转速对照表 (35)I.4 直连式减速箱的技术数据 (36)I.5 直连式角行程关断力矩与多回转关断力矩对照表 (37)I.6 直连式角行程全行程时间与多回转输出转速对照表 (37)I.7 底座曲柄式减速箱的技术数据······································38 I.8底座曲柄式角行程关断力矩与多回转关断力矩对照表··39 I.9 底座曲柄式角行程全行程时间与多回转输出转速对照表39附录a 多回转型的齿轮单元 2SA5.1/2/3/4 . - (40)b 多回转型的齿轮单元 2SA5.5/6/7/8 . - (41)c 直行程型的齿轮单元和线性单元2SA5.1/2/3/4.-..+LE12.1/25.1/50.1/70.1 (42)d 直行程型的齿轮单元和线性单元2SA5.5/6 . -+LE100.1/200.1 (43)p 小的角行程型的齿轮单元2SG5 (44)e 角行程型的齿轮单元 2SA5. . . - +GS/GF (45)i 控制单元(电机功率至 1.5 kW) (46)k 控制单元(电机功率从 3 kW起) (47)n 符合EC标准的声明 (48)第2页E20185-P920-B701-X-5D00E20185-P920-B701-X-5D00 第3页1 总的说明 1.1安全操作说明本手册中,通过对下列图形符号的适当定义,来引起对安全操作步骤的注意。
电动调节阀使用说明书

表1
工作温度℃ 代号
-20~200(铸铁) -40~250(铸钢铸不锈钢)
省略
-40~450(铸钢) -60~450(铸不锈钢)
G
表2
阀体材质 代号
碳钢 C
不锈钢 P
表4
铸铁 省略
阀门类型 代号
精小型单座 JP
精小型套筒 JM
表3
公称压力 Mpa
0.6
1.6
4.0
6.4
代号
6
16
40
64
表5
执行机构类型 代号
二、产品特点
ZDSJP(M)电子式精小型电动单座(套筒)调节阀具有体积小、重量轻、连线简单、流量大、调节 精度高等特点,广泛应用于电力、石油、化工、冶金、环保、轻工、教学和科研设备等行业的工业过程自 动控制系统中。
三、 型号编制说明
TK ─Z D S J P ——
工作温度(表 1) 阀体材质(表 2) 公称压力(表 3) 阀门结构形式(表 4) 精小型 直行程位移 执行机构类型(表 5) 自控阀门
312
381LS(X)A-08 341L S(X)A-08
LS(X) 381LS(X)B-30 A-20 341LS(X)B-30
381LS(X)B-50 341LS(X)B-50
381LSC-65
ZAZ-1
DKZ-310C
DKZ-410 C、DKZ-510 C
16
25
40
60
铸铁按 JB78-59、铸钢按 JB79-59
单座调节阀阀芯与流量特性图
套筒调节阀阀芯与流量特性图 图3
4、执行机构 类型:可选 PSL、QSL 或 ZAZ、DKZ 电子式直行程执行机构,防爆型选用 3810L、3410 型。 技术参数和性能:请参阅对应的执行机构及伺服放大器说明书。或与大禹公司技术部联系,索要相关资料。
SIPOS执行器说明

第三章 SIPOS执行器说明概述西门子公司于1905年生产出世界上第一台电动执行机构,SIPOS(SIEMENS Positioner)的缩写为其电动执行机构的商标。
SIPOS已被广泛应用于全球各个工业生产领域。
中国电厂的所有电动汽机旁路上使用的执行机构几乎全部为原装进口SIPOS。
西门子公司还分别于1987年和1992年向中国的两家制造厂出售其SIPOS1系列和SIPOS 3系列的生产技术。
西门子公司相继淘汰了SIPOS 1和SIPOS 3,并首次创造性地将先进而又成熟的电机变频调速技术应用于电动执行机构中。
采用内置一体化变频器来控制执行器的电机,并于1997年推出面向21世纪的新一代SIPOS 5系列变频智能型电动执行机构。
为适应市场需要,自1999年10月1日起,西门子公司电动执行机构部门从西门子公司庞大的机构中独立出来。
并将SIPOS作为公司名,在德国成为具有独立法人地位的电动执行机构专业性公司:SIPOS Aktorik GmbH(西博思电动执行机构有限公司)。
西博思公司的总部及生产厂位于德国纽伦堡市,并已在全球主要国家和地区设有销售和服务机构。
自1999年10月1日起,西门子公司所有与电动执行机构有关的业务已全部转至西博思公司。
西门子公司不再生产电动执行机构。
独立后的西博思公司仍以SIPOS作为其品牌的商标,但不再属于西门子公司。
西门子公司现在是西博思公司在全球的重要客户之一。
西博思公司淘汰了SIPOS 5,于2001年年初推出第二代变频智能型电动执行机构-SIPOS 5 Flash系列。
第一节、框图及子部件装配图1:SIPOS 5 Flash PROFITRON 专业型功能描述图SIPOS 5 Flash 系列执行机构主要由两部分组成:齿轮单元和控制单元。
•齿轮单元(见附录 e)主要由下列部件组成:- 齿轮箱(211-217 号部件)1),- 电机(230 号部件),- 手动装置(250 号部件),- 信号齿轮单元(2211),222,223,225 号部件),- 输出法兰盘(240 1)号部件)及和输出轴类型有关的机械附加件(216,241,243,254,260,265 和270),- 电气连接部分(036 号部件),- 小的角行程齿轮箱(83. 号部件)2)。
德国PS电动执行机构说明书
目录一、用途 (1)二、型号、规格及重要技术性能 (1)1、型号、规格 (1)2、重要技术性能 (1)三、基本工作原理 (2)1、系统原理方框图 (2)2、基本原理 (2)四、结构说明 (11)五、电动执行器的安装、校验及维修使用 (11)1、电动执行器的安装和接线 (11)2、电动执行器的校验 (12)3、电动执行器的使用和维护 (15)一、用途DAR型电动执行器是DDS—II、III型电动单元组合仪表中的执行单元, 它即可与变送单元、调节单元等配套, 接受统一的直流信号0~10mA(或4~mA)也可以接受用其他方法输入直流信号0~10mA(或4~mA), 并将此输入的直流信号转变成相相应的角位移, 自动地操作风门、档板、阀门等, 以便完毕自动调节之目的, 它广泛应用于化工、石油、冶金、矿山、电站、轻工等部门。
DAR型电动执行器是无触点式的, 它与DFD型电动操作器配合使用时, 可实现自动调节和手动调节, 进行安全自动化和半自动化生产。
二、型号、规格及重要技术性能一、型号、规格DAR型电动执行器按其输出力矩和出轴每转时间的不同, 分以下几种规格:(表一)二、重要技术性能1、输入信号0~10毫安(直流)4~20毫安(直流)2、出轴力矩(见表一)3、出轴每转时间(见表一)4、出轴有效位移0~90(转角)5、输入电阻200欧姆250欧姆6、输入通道三个7、死区<=150毫安<=240微安8、非线性误差<=+2.5%9、变差<=1.5%10、纯滞后<=1秒11、电源电压220伏50赫;380伏50赫12、稳定性出轴振荡次数不大于3次13、使用环境伺服放大器:温度0~+45℃相对湿度<=10~70%无腐蚀气体的环境执行器: 温度-10~+55℃相对温度<=95%无腐蚀气体的环境三、基本工作原理一、系统原理方框图DAR型电动执行器是单元组合仪表中的一个执行机构, 其系统原理方框图如图一图中: DFC—伺服放大器DFD—电动操作器二、DZA—执行器(SD单相伺服电机, WF位置发送器, J减速器)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一、用途 (1)二、型号、规格及主要技术性能 (1)1、型号、规格 (1)2、主要技术性能 (1)三、基本工作原理 (2)1、系统原理方框图 (2)2、基本原理 (2)四、结构说明 (11)五、电动执行器的安装、校验及维修使用 (11)1、电动执行器的安装和接线 (11)2、电动执行器的校验 (12)3、电动执行器的使用和维护 (15)一、用途DAR型电动执行器是DDS—II、III型电动单元组合仪表中的执行单元,它即可与变送单元、调节单元等配套,接受统一的直流信号0~10mA(或4~mA)也可以接受用其他方法输入直流信号0~10mA(或4~mA),并将此输入的直流信号转变成相对应的角位移,自动地操作风门、档板、阀门等,以便完成自动调节之目的,它广泛应用于化工、石油、冶金、矿山、电站、轻工等部门。
DAR型电动执行器是无触点式的,它与DFD型电动操作器配合使用时,可实现自动调节和手动调节,进行安全自动化和半自动化生产。
二、型号、规格及主要技术性能一、型号、规格DAR型电动执行器按其输出力矩和出轴每转时间的不同,分以下几种规格:(表一)二、主要技术性能1、输入信号 0~10毫安(直流) 4~20毫安(直流)2、出轴力矩(见表一)3、出轴每转时间(见表一)4、出轴有效位移 0~90(转角)5、输入电阻 200欧姆 250欧姆6、输入通道三个7、死区 <=150毫安 <=240微安8、非线性误差 <=+2.5%9、变差 <=1.5%10、纯滞后 <=1秒11、电源电压 220伏50赫;380伏50赫12、稳定性出轴振荡次数不大于3次13、使用环境伺服放大器:温度0~+45℃相对湿度<=10~70%无腐蚀气体的环境执行器: 温度-10~+55℃相对温度<=95%无腐蚀气体的环境三、基本工作原理一、系统原理方框图DAR型电动执行器是单元组合仪表中的一个执行机构,其系统原理方框图如图一图中:DFC—伺服放大器DFD—电动操作器DZA—执行器(SD单相伺服电机,WF位置发送器,J减速器)。
二、基本原理本系统是一个具有全波输入带反馈的双拍磁放大器的自动调节系统,其工作情况如下:(1)DFD操作器放在自动位置(一)输入信号Im=0时输入信号Im=0,也就是说Iλ-[(Iφ+Iβγ)]=0,磁放大器无信号输入,因而磁放大器没有输出,整个放大输出为零,单相伺服电机不转动,故减速器之输出轴应停在两个极位置或某一确定的位置。
(二)当输入信号Im=0时输入信号Im=0,也就是说Im= Iλ-[(Iφ+Iβγ)]≠0 ,有信号输入给磁放大器,此直流信号便破坏了原来接成桥式平衡的磁动势,出现误差磁势,在此误差磁势的作用下,就使得磁放大器输入的直流信号进行调制(变为交流信号)并放大,后再经过整流输出给脉冲触发器,脉冲触发器行到足够大小的信号后,便产生足够数量和幅度的触发脉冲,此触发脉冲便输出给主回路,触发可控硅,从而使得单相伺服电机旋转,减速器的输出轴便带动负载向一方向转动,与此同时,同轴固定凸轮也同方向转动,便得与凸轮端而接触的铜棒带动差动变压器的铁芯作相应的位移,(位反不是差动变压器式的,而是长寿命电位器式结构时,无凸轮,用齿轮传动带动长寿命电位器同步旋转),使位置发送器输出Iø,此位置反馈信号加到放大器输入端,与放大器输入信号J2相比较其方向与输入信号相反,即负反馈,且单右式成立:Im= Iλ-(Iβγ+Iø)=0 ,磁放大器推挽两臂磁动势重新平衡,放大器输出为零,脉冲触发器停止工作,可控硅关闭,单相伺服电机停止转动,输出轴停在某一需要位置,这样便完成一次自动调节过程。
单相伺服电机采用了傍磁正铰式杠杆制动机构,能保证在可控硅停止触发或断电后迅速地制动,这样改善了系统和稳定性,消除了负载的反作用力的影响。
(2)DFD操作器的转换开关至手动位置DFD型操作器的转换开关转至手操作位置时,直接由操作器的转换开关控制电机绕组通电方向,从而得以实现输出轴出轴的正转或反转。
电动执行器系统原理线顺见附图。
电动执行器各部分工作原理分述如下:(一)伺服放大器:伺服放大器主要用于接受输入信号与执行器位置反馈信号并进行比较以输信号差,从而便单相伺服电机旋转,减速器的输出轴便带动负荷向一个方向转动。
目前我厂生产的可与执行器配套使用的伺服放大器的器品种、规格比较多,下表将伺服放大器的型号、名称、结构组成及主要特点列出,供用户在选择时参考。
有关这些产品的详细技术参数、外形、(二)、执行器:执行器部分包括单相伺服电机,减速器和位置发送器。
单相伺服电动机系由一个用冲槽硅钢片迭成的定子和鼠笼转子组成。
定子上均布着二个相隔90度电角度的定子绕组(匝数和线径相同),分别和伺服放大器的二组主回路相串联,借分相电容器使二个绕组获得90度相位差的交流电压,其合成矢量产生定子旋转磁场。
此定子磁力线所切割,产生感应电动势,在电支势的作用下转子导体中就有电流,转子电流与旋转磁场相互作用,转子导体上就有电磁力。
电磁力产生电磁转矩,使转子起步加速,转子旋转的方向取决于二组定子绕组上的电压,在相位上谁领前,由于转子电阻较大,单相伺服电动机具有较大的起动转矩和软的机械特性。
单相伺服电动机部装有正铰式杠杆制动机构,能保证电动机在断电时迅速地制动,其结构是定子一端装有二块带有杠杆的街铁,电动通电时,定子磁场经街铁而闭合,此时街铁被吸合在定子表面。
街铁通过铰链使杠杆端将压缩弹簧顶起,从使制动轮和制动盘脱开,电机以额定转速旋转,断电时,定子磁场消失,制动盘被子压缩弹簧压向制动轮而使电机制动。
后机盖上有调整螺钉,可调整街铁和定子表面的距离,以保证可靠地吸合和制动,电机后端盖上装有“把手”,将“把手”拨到“手动”位置,可使动轮和制动盘脱开,拉出减速器的手轮,可进行执行机构就地手动操作。
将“把手”拨到“电动”位置,保证电机断电时可靠地制动,单相伺服电动机结构示意图二所示。
图二单相伺服电机结构示意图电机的调校方法:电机出厂前均已按有关要求进行过调校,用户安装使用即可,由于制动部分是可调的,使用过程中用户根据制动轮的磨损情况等要进行必要的调试:安装前为熟悉结构和性能也可能要进行调试,以便熟悉和掌握调校方法。
我厂生产的电机制动器调校方法如下:①将手把拨至电动位置。
②卸下导向件上两个螺母。
③拿下罩盖。
④并接上分相电容器(16W电机4uF、25W电机6 uF,60W电机10uF,160W电机16 uF)。
⑤接好电源,通断几次,看看制动器工作情况。
⑥调节街铁与定子壁间的磁性间隙:松开后机盖上两个调节螺栓的背母,调节螺栓即可:待找到街铁最佳工作位置时(通电检查)背紧螺母。
⑦通电交替调节制动盘上的调节螺钉和导向件上的压缩弹簧使制动盘能有效地制动和脱开为止。
⑧装上罩盖,拧上导向件上两个螺母。
减速器是将高转速,小转矩的电机输出功率转变成低转速。
大恩矩的执行机构输出轴功率。
减速器采用一级平齿和一级行星机构相混合的机械传动结构,减速器按输出功率的不同,整个系列分为八个基型品种,其机械传动结构如图三、四所示。
技术参数见表二行星传动机构具有体积小、速比大、承载力大、效率高等特点。
其基本部件是由齿轮、摆轮、偏心轴、联轴器四者组成K—H—V行星结松,其基本原理是由偏心轴使摆轮齿轮的数Z2少,而周节T相同。
当偏心轴每转一转,齿轮和摆轮的相对运动为(Z2-Z1)个齿的距离。
K-H-V行星机构的传动比I=Z1/(Z2-Z1)*250N*m以下只用一个摆轮(单偏心机构)600N*m以上用十胩摆轮(双偏心机构)。
从传动结构图中看出,电动机输出轴经一级平齿Z4-Z3,带动偏心轴运转,使装在偏心轴上的摆轮产生偏转,并和齿轮产生啮合,摆轮的偏摆通过销套,销轴和联轴器变成低速的出轴旋转,并输出足够的机械转距。
为把输出轴限制在90度的转角围,以保证不损坏调节机构及有关杠杆,在机座上装有二块止档,起机械限位作用。
减速器箱体上装有手动部件,用来进行就地手动操作,操作时将电机把手拨到手动位置,将手柄拉出摇动即可,减速器的输出轴另一端装有盘簧和凸轮,凸轮借盘簧的压力和出轴一起转动。
凸轮上有限位槽,用机座上的限位销来限制凸轮的转角。
位置发送器是用来现场执行器输出转动所带动的位置转换成电信号输出的装置。
目前我厂生产的位置发送器有以下几种,请用户在使用时对照所提供产品进行调试、检修。
1、差动变压器式位置发送器位置发送器包括差动变压器,电源变压器2BD、补偿变压器3BD、印刷电路板、差动变压器的结构是一组对称的线圈,初级线圈位于两个相同的次级线圈之间,由稳定的交流电压激磁。
次级线圈反向串联,其感应电压的差值作为输出,输出电压的大小由线圈中铁芯轴向位移所决定,差动变压器的交流输出电压经R32、R34滤去高次谐波,再通过D31—D34桥式全波整流,滤波后接负载。
为保证在正个行程围有良好的线性,用一恒定的直流电压进行零点补偿,滤波后接负载。
为保证正个行程围有良好的线性,用一恒定的直流电压进行零点补偿。
线路中用热敏电阻RT(阻值随温度作灵敏变化的电路元件)作温度补偿,差动变压器的激磁用磁用磁铁谐振式交流稳压电源供电。
并加一补偿变压器3BD使稳压精度得以进一步提高。
0~10mA位置发送器输出回路有电位器3R,可进行满刻度调整。
对4-20mA位置发送器是50赫直接激磁,整流输出的方式由交流稳压零点补偿和温度补偿电路经三极管其基极电路恒流输出,W1可进行满刻度调整,W2可进行4MA调整。
2、直滑电位器式位置发送器它包括直滑式导电塑料电位器、电源变压器、结路板组件,它可以在不改变任何条件的情况下,实现I、II型的互换,基本原理图如图五。
图中1R为直滑式导塑料电位器,2R(47K)为调零电位器,3R(470欧姆)为调满电位器。
本产品可带终端电信号限位功能。
3、传感器式位置发送器它我包括精密电感式传感器、电源变压器、线路板组件。
其部线路板接线端子图如图六,端子4、5为0—10毫安输出,端子6、7为4—20毫安输出。
如需改变位移方向,将“棕”、“黑”二线对调位置即可。
线路板上的调零电位器、调满电位器均有标注。
本产品可带机械限位开关,用于直接控制电机绕组电流的通、断或用作开关量输出,以控制其它量。
位置发送器与减速器之间的联接和调正是通过调正螺丝,调整推杆位置和凸轮及盘簧来实现的。
当减速器输轴旋转时,依靠盘簧紧压在凸轮上的磨擦力,带动凸轮随出轴一起旋转。
轮的旋转压在轮端面上的差动变压器推杆产生轴向位移,从面改变铁芯在差动变压器线圈中的位置达到改变位置发送器输出电流大小的目的。
凸轮端面是等距上升的螺旋线,输出轴每转动一个单位角度,凸轮端面的上升量是相等的,使铁芯的轴向位移是线性的,这就保证了输出轴的转角从0-90度变化时,差动变压器的铁芯在线圈中移动8mm,对应的位置反馈的输出电流的变化,转角和输出电流呈丝性关系推杆上弹簧是为了消除凸轮端面与推杆之间的间隙,密封套是为了防止减速器中的油进入位置发送器,这任何转角位置上,凸输上有一个腰圆形限位槽(弧度约95度左右)。