数值分析追赶曲线的计算机模拟
数值分析在计算机仿真中的应用
数值分析在计算机仿真中的应用数值分析是一门应用数学的学科,主要研究如何利用计算机进行数值计算和数值解析。
它在计算机仿真中扮演着重要的角色,能够帮助研究人员模拟和预测复杂的实际问题。
本文将介绍数值分析在计算机仿真中的应用。
一、数值方法的基础在进行计算机仿真之前,首先需要建立数学模型来描述实际问题。
然而,大部分实际问题往往是复杂的,难以直接求解。
这就需要运用数值分析的方法,通过近似和数值计算,来求解模型的数值解。
在数值分析中,常用的数值方法包括插值方法、数值积分、微分方程数值解等。
例如,插值方法可以通过已知数据点的函数值,来估计其他位置的函数值。
而数值积分则可以用于计算复杂函数的积分值。
微分方程数值解则可以帮助模拟动力系统、电路等实际问题的行为。
二、计算机仿真的优势计算机仿真是通过使用计算机模型来模拟和预测实际系统的行为。
相比于传统的实验方法,计算机仿真具有以下几个优势。
首先,计算机仿真可以在较短的时间内获得大量的数据。
通过高速计算,可以对不同的参数进行快速的变动,从而观察系统的行为。
这对于需要大量实验数据的问题尤为重要。
其次,计算机仿真可以模拟一些实验难以实现的问题。
例如,对于一些高风险或高成本的实验,计算机仿真可以提供更加安全和经济的解决方案。
最后,计算机仿真可以在设计初期就对系统进行优化。
通过不断调整参数,可以找到最优的系统配置和运行策略。
这在工程设计和产品开发中具有重要意义。
三、数值分析在计算机仿真中的应用数值分析在计算机仿真中有着广泛的应用。
以下将介绍其中几个典型的应用领域。
1. 流体力学仿真流体力学仿真是通过数值方法对流体力学问题进行模拟和分析的过程。
在航空、汽车、能源等领域,流体力学仿真被广泛运用于优化设计和性能评估。
数值方法可以对复杂的流体流动进行模拟,提供流速、温度、压力等关键参数的分布情况,有助于优化设计和改善气动性能。
2. 结构力学仿真结构力学仿真主要研究结构的应力、应变和变形等问题。
(整理)数值分析课件 第3章 函数逼近与曲线拟合
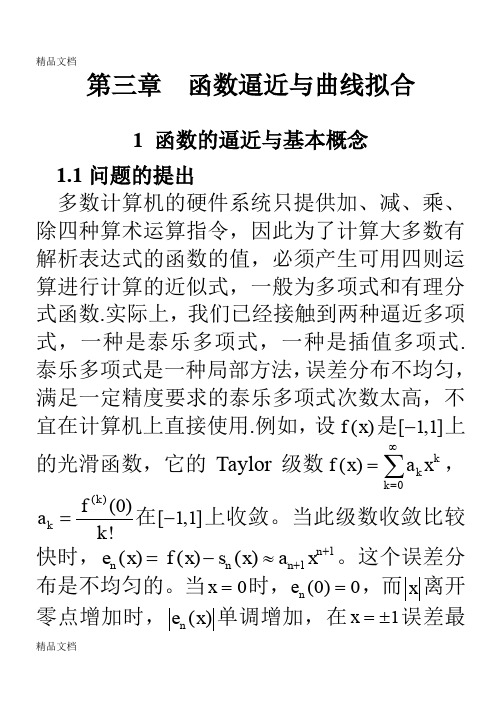
第三章 函数逼近与曲线拟合1 函数的逼近与基本概念1.1问题的提出多数计算机的硬件系统只提供加、减、乘、除四种算术运算指令,因此为了计算大多数有解析表达式的函数的值,必须产生可用四则运算进行计算的近似式,一般为多项式和有理分式函数.实际上,我们已经接触到两种逼近多项式,一种是泰乐多项式,一种是插值多项式.泰乐多项式是一种局部方法,误差分布不均匀,满足一定精度要求的泰乐多项式次数太高,不宜在计算机上直接使用.例如,设()f x 是[1,1]-上的光滑函数,它的Taylor 级数0()k k k f x a x ∞==∑,()(0)!k k f a k =在[1,1]-上收敛。
当此级数收敛比较快时,11()()()n n n n e x f x s x a x ++=-≈。
这个误差分布是不均匀的。
当0x =时,(0)0n e =,而x 离开零点增加时,()n e x 单调增加,在1x =±误差最大。
为了使[1,1]-的所有x 满足()()n f x s x ε-<,必须选取足够大的n ,这显然是不经济的。
插值函数出现的龙格现象表明,非节点处函数和它的插值多项式相差太大。
更重要的是,实际中通过观测得到的节点数据往往有各种误差,此时如果要求逼近函数过全部节点,相当于保留全部数据误差,这是不适宜的。
如图1所示,给出五个点上的实验测量数据,理论上的结果应该满足线性关系,即图1中的实线。
由于实验数据的误差太大,不能用过任意两点的直线逼近函数。
如果用过5个点的4次多项式逼近线性函数,显然误差会很大。
实验数据真函数插值多项式逼近精确的线性逼近图11.2范数与逼近一、线性空间及赋范线性空间要深入研究客观事物,不得不研究事物间的内在联系,给集合的元素之间赋予某种“确定关系”也正是这样的道理.数学上常把在各种集合中引入某些不同的确定关系称为赋予集合以某种空间结构,并将这样的集合称为空间.最常用的给集合赋予一种“加法”和“数乘”运算,使其构成线性空间.例如将所有实n 维数对组成的集合,按照“加法”和“数乘”运算构成实数域上的线性空间,记作n R ,称为n 维向量空间.类似地,对次数不超过n 的实系数多项式全体,按通常多项式与多项式加法及数与多项式乘法也构成数域R 上一个线性空间,用n H 表示,称为多项式空间.所有定义在[,]a b 上的连续函数集合,按函数加法和数与函数乘法构成数域R 上的线性空间,记作[,]C a b .类似地,记[,]p C a b 为具有p 阶连续导数的函数空间.在实数的计算问题中,对实数的大小、距离及误差界等是通过绝对值来度量的.实践中,我们常常会遇到对一般线性空间中的向量大小和向量之间的距离进行度量的问题,因此有必要在一般线性空间上,赋予“长度”结构,使线性空间成为赋范线性空间.定义1 设X 是数域K 上一个线性空间,在其上定义一个实值函数,即对于任意,x y X ∈及K α∈,有对应的实数x 和y ,满足下列条件(1) 正定性:0x ≥,而且0x =当且仅当0x =;(2) 齐次性:x x αα=;(3) 三角不等式:x y x y +≤+;称为X 上的范数,定义了范数的线性空间就称为赋范线性空间.以上三个条件刻划了“长度”、“大小”及“距离”的本质,因此称为范数公理.对n X 上的任一种范数,n X ∀∈x,y ,显然有±≥-x y x y .n R 上常用的几种范数有:(1) 向量的∞-范数:1max i i nx ∞≤≤=x(2) 向量的1-范数:11n i i x ==∑x(3) 向量的2-范数:12221()n i i x ==∑x (4) 向量的p -范数:11()n p pi p i x ==∑x其中[1,)p ∈∞,可以证明向量函数()p N x x ≡是nR 上向量的范数. 前三种范数是p -范数的特殊情况(lim p p ∞→∞=x x ).我们只需表明(1).事实上1111111max max max n n p pp p i i i i i n i n i n i i x x x x ≤≤≤≤≤≤==⎛⎫⎛⎫≤≤≤ ⎪ ⎪⎝⎭⎝⎭∑∑及max 1p →∞=,故由数学分析的夹逼定理有1l i m ma x i p p i nx ∞→∞≤≤==x x 。
数值分析课程设计
2.3056
2.1389
1.9722
1.8056
1.6389
1.4722
1.3056
1.1389
0.9722
0.8056
0.6389
0.4722
0.3056
【结果分析】
第一小题当中首先算出较为精确的I0,之后经过代入的方法计算出 I(20),结果是比较准确的。但是第二小题当中先是算出必是很精确的I(30),本来所得误差比第一步就稍微大一点了,然后再用这个误差稍微大的I(30)回代计算I(20)——I(1),而从I(30)算到I(20)的时候误差这时已经够大了,采用这个误差更大的结果去计算我们想要的值,当然误差大得惊人啦,显然比第一种误差大得多。所以我们使用第一种方法得到的结果较接近准确值。
数
值课
分 程
析 设
计
专业班级:信息与计算科学09-1班
姓 名:陈育伟
学 号:********
实验一
1.1水手、猴子和椰子问题:五个水手带了一只猴子来到南太平洋的一个荒岛上,发现那里有一大堆椰子。由于旅途的颠簸,大家都很疲惫,很快就入睡了。第一个水手醒来后,把椰子平分成五堆,将多余的一只给了猴子,他私藏了一堆后便又去睡了。第二、第三、第四、第五个水手也陆续起来,和第一个水手一样,把椰子分成五堆,恰多一只猴子,私藏一堆,再去入睡,天亮以后,大家把余下的椰子重新等分成五堆,每人分一堆,正好余一只再给猴子,试问原先共有几只椰子?
具体算法如下:
>> x=0:.1:pi;
y1=sin(x);
y2=x-x.^3/6;
plot(x,y1,x,y2)
得到的图形如右图:
(3)y3=x-x^3/6+x^5/120,x∈[0,pi/2]
微分方程数值解追赶法

微分方程数值解追赶法追赶法,也称为三对角矩阵算法,是一种用于求解线性微分方程的数值方法。
这种方法主要基于矩阵分解和迭代的思想,能够有效地解决微分方程的数值求解问题。
在微分方程的数值解法中,追赶法通常用于求解形如 (y' = f(x, y)) 的常微分方程。
其基本思想是将微分方程转化为差分方程,然后通过迭代的方式逐步逼近微分方程的解。
具体来说,追赶法的步骤如下:矩阵分解:首先,将微分方程 (y' = f(x, y)) 转化为差分方程的形式。
然后,将差分方程中的系数矩阵进行分解,将其分解为一个下三角矩阵 (L)、一个对角矩阵 (D) 和一个上三角矩阵 (U)。
这样,差分方程可以转化为(D^{-1}Lx = D^{-1}b) 的形式。
迭代求解:接下来,使用迭代法求解 (D^{-1}Lx = D^{-1}b)。
通常,可以选择Gauss-Seidel迭代法或者SOR(Successive Over-Relaxation)迭代法等。
在每次迭代中,先求解下三角矩阵 (L) 的部分,然后求解对角矩阵(D) 的部分,最后求解上三角矩阵 (U) 的部分。
通过不断迭代,逐步逼近差分方程的解。
收敛性判断:在迭代求解的过程中,需要判断迭代的解是否收敛。
通常,可以通过比较相邻两次迭代的解的差值来判断是否收敛。
当差值小于某个预设的阈值时,认为迭代收敛。
解的输出:当迭代收敛后,可以得到微分方程的数值解。
此时,可以将解输出到控制台或者保存到文件中。
追赶法的优点在于其算法简单、易于实现,并且对于大规模的微分方程求解问题具有较高的计算效率和精度。
然而,追赶法也存在一些局限性,例如对于某些特殊类型的微分方程可能不适用,需要进行特殊处理。
曲线曲面的计算机数学处理

(x2 x0 )(x2 x1)
(x2 x0 )(x2 x1)
f (x0 , x2 ) f (x0 , x1) x2 x1
上式含义为一阶均差的均差,称为函数f(x)的 二阶均差,记为f(x0,x1,x2)
依次类推,可得
p (x) 2
f
(x0 )
f
(x0 , x1)( x x0 )
之,三次样条函数就是全部通过型值点,二阶连续 可导的分段三次多项式函数。
3、三次样条函数插值解
1)利用公式
M M 2
0
0
1
0
(1
)
1
M
0
2M
1
1
M
2
1
(1
)
2
M
1
2M
2
2
M
3
2
M 2M M (1 )
n1
n2
n1
n1
n
n1
M M
(1 )
2
n
n1
n
n
2
1 1
f
(x0 , x1, x2 )( x x0 )( x x2 )
经直接计算可得
y
y
y
f
(x0 ,
x1,
x2)
( x0
0
x1)(x0
x2)
( x1
1
x0)(x1
x2)
( x2
2
x0)(x2
x1)
由上式可以推知,二阶均差也与点的排序无关,也 具有对称性。由此可以归纳出高阶均差的定义:k-1 阶均差的均差称为k阶均差,即
2、插值的基本思路
插值的基本思路是先设法对列表函数f(x)构 造一个简单函数y=p(x)作为近似表达式,然 后再计算p(x)的值来得到f(x)的近似值。
利用Matlab进行数值模拟的方法
利用Matlab进行数值模拟的方法引言数值模拟是现代科学领域中不可或缺的一种工具,它通过数学模型和计算机算法,模拟和预测实际系统的行为。
随着科学技术的不断发展,数值模拟方法逐渐成为各个学科的重要组成部分。
Matlab作为一种强大的科学计算工具,为数值模拟提供了丰富的函数库和易于使用的编程环境。
本文将介绍一些利用Matlab进行数值模拟的方法,以及其在不同领域的应用。
一、常微分方程的数值解法常微分方程在物理、工程、生物等领域中广泛存在。
利用Matlab进行常微分方程的数值解法,可以有效地求得方程的近似解。
Matlab中的ode45函数是常用的数值解法之一,它基于龙格-库塔算法,可以处理非刚性和刚性问题。
通过设定初始条件和方程形式,利用ode45函数可以得到系统的数值解,并绘制出相应的曲线图。
例如,考虑一个一阶常微分方程dy/dx = -2xy,初始条件为y(0) = 1。
可以通过以下代码进行数值模拟:```Matlabfun = @(x, y) -2*x*y;[x, y] = ode45(fun, [0, 10], 1);plot(x, y)xlabel('x')ylabel('y')title('Solution of dy/dx = -2xy')```运行以上代码后,可以得到方程解的图像,从而对其行为有更直观的理解。
二、偏微分方程的数值解法偏微分方程在物理、流体力学、电磁学等领域中具有重要应用。
常用的偏微分方程的数值解法有有限差分法(Finite Difference Method)和有限元法(Finite Element Method)等。
在Matlab中,可以利用pdepe函数进行偏微分方程的数值模拟,其中包含了一维和二维问题的求解算法。
以热传导方程为例,假设一个长为L的均匀杆子,其温度分布满足偏微分方程∂u/∂t = α*∂²u/∂x²,其中u(x, t)表示温度分布。
数值分析实验报告末班
数值分析实验报告末班实验目的本实验旨在通过计算机模拟与实际测量相结合的方法,研究数值计算方法在实际问题中的应用,并通过实验结果验证和分析方法的准确性和可靠性。
实验原理在数值分析中,我们通常使用数值方法来解决数学模型的近似求解问题。
最常用的数值方法包括插值法、数值积分法、求解线性方程组的迭代法等。
这些方法通过将连续的数学问题转化为离散的数值计算问题,通过计算机模拟来求解。
在本次实验中,我们选择了两个典型的数值计算问题进行研究。
第一个问题是求解非线性方程的数值解,在这个问题中,我们使用了牛顿迭代法和二分法作为数值求解的方法。
第二个问题是对函数进行数值积分,我们使用了辛普森公式和梯形公式进行数值积分的计算。
实验步骤与结果求解非线性方程的数值解我们选择了一个非线性方程f(x) = x^3 - 2x - 5 = 0 作为例子,通过牛顿迭代法和二分法来求解其数值解。
1. 首先,我们使用牛顿迭代法。
通过计算,我们得到了该非线性方程的一个近似解为x =2.0945514815423265。
2. 其次,我们使用二分法来求解该非线性方程的数值解。
通过计算,我们得到了一个近似解为x = 2.0945514815423265。
通过比较以上两个数值解,我们可以发现两种方法得到的结果非常接近,验证了这两种方法的准确性和可靠性。
数值积分我们选择了一个函数f(x) = x^2 在区间[0, 1] 上进行数值积分,通过辛普森公式和梯形公式来计算其数值积分结果。
1. 首先,我们使用辛普森公式进行数值积分。
通过计算,我们得到了该函数在[0,1] 区间上的数值积分结果为0.3333333333333333。
2. 其次,我们使用梯形公式进行数值积分。
通过计算,我们得到了该函数在[0, 1] 区间上的数值积分结果为0.3333333333333333。
通过比较以上两种方法得到的数值积分结果,我们可以发现两种方法得到的结果完全相同,进一步验证了这两种方法的准确性和可靠性。
数值分析上机实践报告
数值分析上机实践报告一、实验目的本次实验主要目的是通过上机操作,加深对数值分析算法的理解,并熟悉使用Matlab进行数值计算的基本方法。
在具体实验中,我们将实现三种常见的数值分析算法:二分法、牛顿法和追赶法,分别应用于解决非线性方程、方程组和线性方程组的求解问题。
二、实验原理与方法1.二分法二分法是一种常见的求解非线性方程的数值方法。
根据函数在给定区间端点处的函数值的符号,不断缩小区间的长度,直到满足精度要求。
2.牛顿法牛顿法是求解方程的一种迭代方法,通过构造方程的泰勒展开式进行近似求解。
根据泰勒展式可以得到迭代公式,利用迭代公式不断逼近方程的解。
3.追赶法追赶法是用于求解三对角线性方程组的一种直接求解方法。
通过构造追赶矩阵,采用较为简便的向前追赶和向后追赶的方法进行计算。
本次实验中,我们选择了一组非线性方程、方程组和线性方程组进行求解。
具体的实验步骤如下:1.调用二分法函数,通过输入给定区间的上下界、截止误差和最大迭代次数,得到非线性方程的数值解。
2.调用牛顿法函数,通过输入初始迭代点、截止误差和最大迭代次数,得到方程组的数值解。
3.调用追赶法函数,通过输入追赶矩阵的三个向量与结果向量,得到线性方程组的数值解。
三、实验结果与分析在进行实验过程中,我们分别给定了不同的参数,通过调用相应的函数得到了实验结果。
下面是实验结果的汇总及分析。
1.非线性方程的数值解我们通过使用二分法对非线性方程进行求解,给定了区间的上下界、截止误差和最大迭代次数。
实验结果显示,根据给定的输入,我们得到了方程的数值解。
通过与解析解进行比较,可以发现二分法得到的数值解与解析解的误差在可接受范围内,说明二分法是有效的。
2.方程组的数值解我们通过使用牛顿法对方程组进行求解,给定了初始迭代点、截止误差和最大迭代次数。
实验结果显示,根据给定的输入,我们得到了方程组的数值解。
与解析解进行比较,同样可以发现牛顿法得到的数值解与解析解的误差在可接受范围内,说明牛顿法是有效的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.3追赶曲线的计算机模拟
问题描述:欧洲文艺复兴时期的著名人物达·芬奇曾经提出一个有趣的“狼追兔子”问题,当一只兔子正在它的洞穴南面60码处觅食时,一只饿狼出现在兔子正东的100码处。
兔子急忙奔向自己的洞穴,狼立即以快于兔子一倍的速度紧追兔子不放。
兔子一旦回到洞穴便逃脱厄,问狼是否会追赶上兔子?
这一问题的研究方法可以推广到如鱼雷追击潜艇、地对空导弹击飞机等问题上去。
在对真实系统做实验时,可能时间太长、费用太高、危险太大、甚至很难进行。
计算机模拟是用计算机模仿实物系统,对系统的结构和行为进行动态演示,以评价或预测系统的行为效果。
根据模拟对象的不同特点,分为确定性模拟和随机性模拟两大类。
模拟通常所用的是时间步长法,即按照时间流逝的顺序一步一步对所研究的系统进行动态演示,以提取所需要的数据。
问题分析:首先计算狼的初始位置到兔子洞穴的直线距离:
由于狼奔跑的速度是兔子速度的两倍,兔子跑60码的时间狼可以跑120码。
如果狼沿直线奔向兔窝,应该是可以追上兔子的。
但是,有人推导出狼在追赶兔子过程中的运动曲线为
根据曲线方程,当时,。
也就是说,在没有兔窝的情况下兔子一直往北跑,在跑到大约66码处将被狼追上。
由此可知,在有兔窝时狼是追赶不上兔子的。
用计算机模拟的方法也可以得到同样的结论。
取时间步长为1s ,随时间步长的增加,考虑这一系统中的各个元素(狼和兔子)所处的位置变化规律,用计算机作出模拟。
最后,根据第60s 时狼所在的位置的坐标,判断狼是否能追上兔子。
问题思考与实验:
(1)设兔子奔跑的速度为,则狼运动的速度为。
建立平面直角坐标系,若当时刻,兔子位于点处,狼位于点处。
试根据,的坐标确定一个单位向量描述狼在时段内的运动方向。
(2)根据狼的运动方向和速度推导到的坐标的具体表达式;
(3)用计算机绘制追赶曲线的图形(包括静态和动态的图形)。
【问题求解】
由于P 点的运动方向始终指向Q,设在t=t k 时刻的位置为P k (x k ,y k ) ,则P 点的运动方向可以由下面的单位向量表示
116.6190D =≈31221200()10303
y x x x =-+0x =200/3y =01m/s υ=102υυ=k t t =0(0,)k k Q t υ(,)k k k P x y k P k Q k e 1[,]k k t t +(,)k k k P x y 111(,)k k k P x y +++
E k =
P k Q k P k Q k = k k 2k k 2k k k 2k k 2
P 点的速度是2m/s ,取时间步长为∆t ,设在t=t k+1时刻,P 点的位置为P k+1(x k+1,y k+1),于是P 点的位置变化规律为 x k+1=x k +
k (0−x k )2+(t k −y k )2 y k+1=y k +k k k 2k k 2
【编程实现】
建立M 脚本文件 m3_3.m
x2(1)=100;
y2(1)=0;
t(1)=0;
tstep=1;
for k=1:60
t(k+1)=t(k)+tstep;
x2(k+1)=x2(k)+2*(0-x2(k))/sqrt((0-x2(k))^2+(t(k)-y2(k))^2);
y2(k+1)=y2(k)+2*(t(k)-y2(k))/sqrt((0-x2(k))^2+(t(k)-y2(k))^2); x1(k)=0;
y1(k)=t(k);
end
axis([0,100,0,60])
hold on
for k=1:61
plot(x2(k),y2(k),'*',x1(k),y1(k),'o')
pause(0.5)
end
hold off
d=sqrt((0-x(61))^2+(t(61)-y(61))^2);
fprintf('狼与兔子的距离为%5.4\n',d)
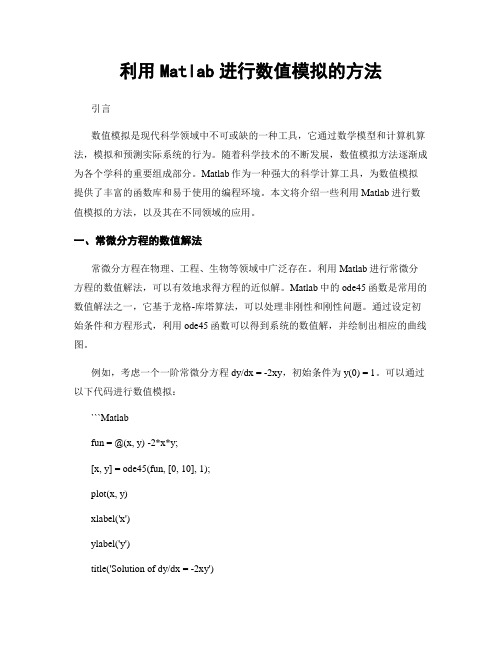
运行程序可以出现动态的图形
去掉语句pause(0.5)后,可以显示静态的图形如下图:
解决本题时,使用了计算机模拟的方法,动态演示了系统的过程,使得问题的解决大大地简化了。