机器人遥操作系统的设计与实现
基于虚拟现实的遥操作系统设计与实现

基于虚拟现实的遥操作系统设计与实现随着科技的不断进步,虚拟现实(Virtual Reality,简称VR)技术日益广泛应用于各个领域。
尤其在遥操作系统的设计与实现上,虚拟现实技术为我们带来了许多创新的可能性。
本文将探讨基于虚拟现实的遥操作系统的设计与实现。
一、遥操作系统的意义与需求遥操作系统是一种通过远程控制设备和系统来完成操作的系统。
它可以实现操作员与被操作对象之间的距离和环境的解耦,为一些特殊情况下的操作提供了便利和安全性。
虚拟现实技术作为一种模拟和增强现实世界的技术,可以提供身临其境的感觉,让用户感觉自己身处虚拟环境中。
基于虚拟现实的遥操作系统可以实现操作员在远程位置上操作,并具备与真实环境互动的能力。
这样的系统可以应用于军事、医疗和工业等领域,为危险、高风险或不便于直接接触的操作提供解决方案,减少人身安全风险。
二、基于虚拟现实的遥操作系统设计框架1. 设备和传感器:基于虚拟现实的遥操作系统需要支持操作员与被操作对象之间的信息交互。
因此,系统需要配备各种传感器、摄像头、手柄等设备,以便实时获取被操作对象的数据。
2. 虚拟环境构建:为了实现身临其境的体验,系统需要构建逼真的虚拟环境。
这包括场景建模、渲染和光线追踪等技术。
通过对虚拟环境的模拟,操作员可以感受到真实环境中的物体、声音和触感等信息。
3. 实时传输与处理:基于虚拟现实的遥操作系统需要实时传输被操作对象的信息,并在远程端进行处理和渲染。
这要求系统具备高速的数据传输和处理能力,以实现低延迟的操作体验。
4. 交互与控制:在设计基于虚拟现实的遥操作系统时,考虑到操作员需要进行准确和精细的操作,系统应提供多种交互方式,如手势识别、语音识别和头部追踪等。
这样,操作员可以通过直观的方式操纵虚拟环境中的对象。
5. 安全性与稳定性:由于遥操作系统可能涉及到危险和高风险的操作,系统的安全性与稳定性显得尤为重要。
系统应具备监控和报警机制,确保操作员和被操作对象的安全,并且系统应具备自动断开连接的功能,一旦发生异常情况,能够对系统进行安全保护。
室外移动机器人遥操作系统的设计与实现_白冰

第36卷 第2期2009年2月计算机科学Computer Science Vo l.36No.2Feb.2009到稿日期:2008-03-04 此项工作得到国家自然科学基金(60504003)资助。
白 冰 硕士研究生,主要研究方向为嵌入式系统、智能机器人,E -mail:b aibin g@;吴潇文 硕士研究生,主要研究方向为嵌入式系统、智能机器人;刘华平 副教授,研究生导师,主要研究领域为智能控制、智能机器人;何克忠 教授,主要研究领域为智能控制、智能机器人。
室外移动机器人遥操作系统的设计与实现白 冰 吴潇文 刘华平 何克忠(清华大学计算机科学与技术系智能技术与系统国家重点实验室 北京100084)摘 要 遥操作是移动机器人指挥控制的重要手段之一。
介绍了一种新型的室外智能移动机器人遥操作系统。
本系统改变传统的固定指挥站,采用基于移动指挥站的操作方式,大大提高了操控的灵活性和系统的隐蔽性。
同时,本系统还使用了先进的无线通信技术,开发了良好的人机交互界面,设计了功能全面的遥操作终端、定向天线云台控制系统以及多传感器环境信息采集系统。
实验表明,系统能够在野外环境中高效、稳定地完成各种遥操作任务。
关键词 室外移动机器人,移动指挥站,遥操作Teleoperation System for Outdoor Mobile RobotBAI Bing W U Xiao -w en L IU H ua -ping HE K e -zhong(State Key Lab oratory of In telligent T echnology an d Sy stems ,Department of C om puter &Science Techn ology,Ts inghua U nivers ity,Beijing 100084,China)Abstract T eleo per at ion is one of the most impo rtant w ays for contro lling mo bile ro bo ts.T his paper intro duced a new type of teleo per atio n system fo r outdoor mo bile ro bo t.Differ ent fro m t raditio nal w ay s that use a statio nar y remo te -co n -t rol statio n,our sy stem adopted a mo bile remot e -co ntr ol stat ion which gr eatly improv es the flex ibility and co ncealment of system.T he advanced w ireless communication technolog y w as applied,and a g oo d human -machine inter face w as de -v elo ped in this teleoperatio n system.Besides,w e a lso desig ned a mult-i functionary teleoperatio n ter minal,a directional antenna co nt rol sy st em and a mult-i sensor y env iro nmental info rmatio n acquisition system.Some pr eliminary ex per imen -ta l results ver ified the effectiveness and stability o f the system in perfor ming teleo per atio n in unkno wn and unst ructur ed fields.Keywords O utdoo r mobile ro bo t,M obile contr ol stat ion,T eleoperat ion1 引言室外移动机器人又称自主陆地车辆或无人驾驶车辆与智能机器人[1]。
基于VR技术的机器人遥操作系统设计与开发
近年来,机器人遥操作技术成为了研究热点[1],被广泛应用于太空及深海探索、核电站设备操作、核辐射探测等复杂危险环境作业中[2-3]。
虚拟现实技术是一门综合性的高新实用技术,可以很好地与机器人技术进行有机结合。
虚拟现实技术通过视觉、力觉和触觉等手段显著增强了机器人遥操作的临场感。
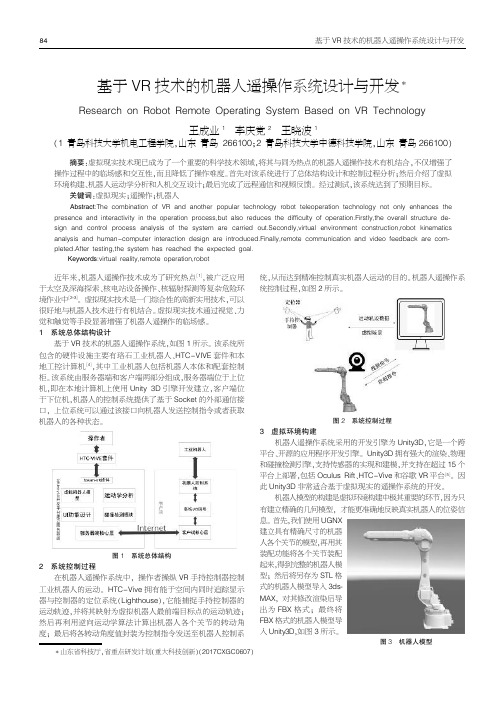
1系统总体结构设计基于VR技术的机器人遥操作系统,如图1所示。
该系统所包含的硬件设施主要有珞石工业机器人、HTC-VIVE套件和本地工控计算机[4],其中工业机器人包括机器人本体和配套控制柜。
该系统由服务器端和客户端两部分组成,服务器端位于上位机,即在本地计算机上使用Unity3D引擎开发建立,客户端位于下位机,机器人的控制系统提供了基于Socket的外部通信接口,上位系统可以通过该接口向机器人发送控制指令或者获取机器人的各种状态。
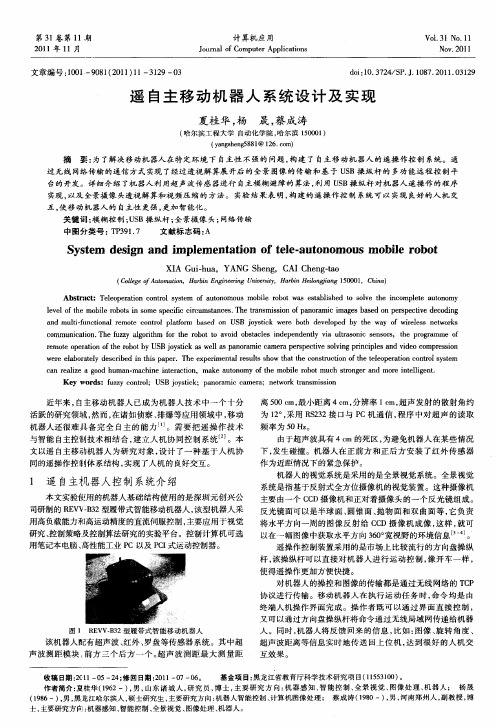
图1系统总体结构2系统控制过程在机器人遥操作系统中,操作者操纵VR手持控制器控制工业机器人的运动。
HTC-Vive拥有能于空间内同时追踪显示器与控制器的定位系统(Lighthouse),它能捕捉手持控制器的运动轨迹,并将其映射为虚拟机器人最前端目标点的运动轨迹;然后再利用逆向运动学算法计算出机器人各个关节的转动角度;最后将各转动角度值封装为控制指令发送至机器人控制系统,从而达到精准控制真实机器人运动的目的。
机器人遥操作系统控制过程,如图2所示。
图2系统控制过程3虚拟环境构建机器人遥操作系统采用的开发引擎为Unity3D,它是一个跨平台、开源的应用程序开发引擎。
Unity3D拥有强大的渲染、物理和碰撞检测引擎,支持传感器的实现和建模,并支持在超过15个平台上部署,包括Oculus Rift、HTC-Vive和谷歌VR平台[5]。
因此Unity3D非常适合基于虚拟现实的遥操作系统的开发。
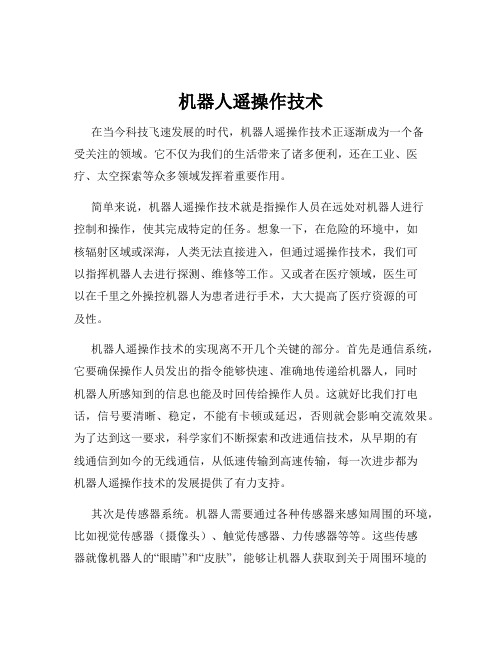
机器人模型的构建是虚拟环境构建中极其重要的环节,因为只有建立精确的几何模型,才能更准确地反映真实机器人的位姿信息。
遥自主移动机器人系统设计及实现
摘
要 : 了解 决 移 动 机 器 人 在 特 定 环 境 下 自主 性 不 强 的 问题 , 建 了 自主 移 动 机 器 人 的 遥 操 作控 制 系统 。 通 为 构
过 无 线 网络 传 输 的通 信 方 式 实现 了经过 透 视 解 算展 开后 的 全 景 图像 的 传 输 和 基 于 U B操 纵 杆 的 多功 能 远 程 控 制 平 S 台 的 开发 。详 细介 绍 了机 器人 利 用超 声波 传 感 器进 行 自主 模 糊 避 障 的 算 法 , 用 U B操 纵 杆 对 机 器人 遥 操 作 的程 序 利 S
XI Gu — ua YANG h n 。 CAICh n .a A ih . Seg e gto
( ol efA tm t n ab nier g U iri,H ri in a g10 0 ,C ia C lg uo ai ,H ri E gnei n esy ab Heo ̄in 50 1 hn ) e o o n n v t n l
lv lo e mo i o o si o p c f i u t n e . h a s si n o a oa c i g sb s d o e s e t e d c d n e e ft b l r b t n s me s e i c c r msa c s T e t n miso fp n r mi ma e a e n p rp ci e o i g h e i c r v
Absr t Tee p r to c nto y tm o u o o us tac : lo e ain o r ls se f a t n mo mo ie r b t wa e tbl h d t s le t e i c mp ee u o my b l o o s sa i e o ov h n o lt a tno s
机器人遥操作技术
机器人遥操作技术在当今科技飞速发展的时代,机器人遥操作技术正逐渐成为一个备受关注的领域。
它不仅为我们的生活带来了诸多便利,还在工业、医疗、太空探索等众多领域发挥着重要作用。
简单来说,机器人遥操作技术就是指操作人员在远处对机器人进行控制和操作,使其完成特定的任务。
想象一下,在危险的环境中,如核辐射区域或深海,人类无法直接进入,但通过遥操作技术,我们可以指挥机器人去进行探测、维修等工作。
又或者在医疗领域,医生可以在千里之外操控机器人为患者进行手术,大大提高了医疗资源的可及性。
机器人遥操作技术的实现离不开几个关键的部分。
首先是通信系统,它要确保操作人员发出的指令能够快速、准确地传递给机器人,同时机器人所感知到的信息也能及时回传给操作人员。
这就好比我们打电话,信号要清晰、稳定,不能有卡顿或延迟,否则就会影响交流效果。
为了达到这一要求,科学家们不断探索和改进通信技术,从早期的有线通信到如今的无线通信,从低速传输到高速传输,每一次进步都为机器人遥操作技术的发展提供了有力支持。
其次是传感器系统。
机器人需要通过各种传感器来感知周围的环境,比如视觉传感器(摄像头)、触觉传感器、力传感器等等。
这些传感器就像机器人的“眼睛”和“皮肤”,能够让机器人获取到关于周围环境的详细信息,然后将这些信息传递给操作人员。
操作人员根据这些信息做出判断和决策,再向机器人发送相应的指令。
然后是控制系统。
这是整个遥操作技术的核心部分,它负责将操作人员的指令转化为机器人能够理解和执行的动作。
控制系统要具备高精度、高稳定性和高可靠性,以确保机器人能够准确地执行任务。
同时,它还要能够处理各种复杂的情况,比如机器人遇到障碍物时的自动避让、在不稳定环境中的平衡控制等等。
在实际应用中,机器人遥操作技术面临着许多挑战。
其中之一就是时延问题。
由于信号传输需要时间,操作人员发出的指令到达机器人时可能会有一定的延迟,而机器人反馈的信息回到操作人员这里也会有延迟。
机器人的遥操作技术研究

机器人的遥操作技术研究一、引言机器人作为一种能够拟人化行为的智能机器人,目前已被广泛应用于许多领域,如工业生产、医疗保健等。
遥操作技术作为机器人技术中重要的内容,对机器人的控制、运作等方面起到关键作用。
本文主要研究机器人的遥操作技术,介绍机器人的遥控操作、传感器技术、控制算法等方面的研究进展。
二、机器人的遥控操作技术机器人的遥控操作技术作为机器人控制领域的重要分支,其目的是通过遥控器、计算机等设备实现对机器人的远程控制,使机器人能够在远程环境下完成人类所需的各种操作,如工业机器人的物料搬运、病房机器人的患者护理等。
机器人的遥控操作技术已经取得了很大的进步,在机器人的控制精度、运作速度等方面都有了很大的提高。
1. 遥控器技术遥控器技术是机器人遥操作技术中最常见的一种技术。
遥控器通过无线通信协议,将指令传输到机器人中,指导机器人完成各种操作。
目前市场上的遥控器种类很多,每种遥控器都有其独特的特点和优势。
如有些遥控器在传输距离上强于其他遥控器,有些遥控器具有更好的控制精度,而有些则具有更多的操作按键。
2. 计算机远程遥控技术计算机远程遥控技术是基于网络技术的一种遥控技术。
用户可以通过计算机软件来控制机器人在任意距离下工作,这种方法可以有效地扩展机器人的使用场景。
计算机远程遥控技术需要具有较高的实时性和灵敏度,以及快速的反应速度。
目前,通过云技术实现遥控操作已成为一种新的趋势。
用户可以通过云端互联网服务器、移动终端或计算机端进行机器人远程控制,降低了传输延迟,大幅提升了机器人的控制效率和操作便利性。
三、机器人的传感器技术机器人的传感器技术是指机器人通过传感器采集其所处环境信息,以定位自身位置、感知周围的场景等,从而对机器人进行控制和操作的技术。
机器人传感器技术发展迅速,已经广泛应用于机器人导航、环境控制、物体识别等方面。
1. 视觉传感器技术视觉传感器技术是一种基于计算机视觉的传感器技术,通过对图像进行处理,识别出图像中的特征物体。
机器人遥操作控制系统设计与实现
机器人遥操作控制系统设计与实现随着现代科技的不断发展,越来越多的机器人开始出现在人们的生活中,为生产、服务和科学研究等领域带来了巨大的便利和效益。
但机器人技术的发展必须与遥操作控制系统相结合,才能实现机器人的智能化和自主化控制。
本文将介绍机器人遥操作控制系统设计与实现的相关内容。
一、机器人遥操作概述机器人遥操作是一种通过远程设备或网络对机器人进行控制,对不适合人类直接操作的场景进行介入的技术手段。
它可以应用于各种环境和场景中,如制造业、医疗、军事、勘探和维护等领域。
遥操作系统一般由操作器、控制器和机器人控制软件组成。
同时,通过传感器和摄像头等设备,还可以实时获取机器人所处环境的信息。
这使得用户能够对机器人进行更灵活、更精细的控制,在避免人工操作风险的同时,提高生产效益和作业质量。
二、遥操作控制系统的系统架构遥操作控制系统分为两个主要的部分,即人机交互界面和机器人控制。
人机交互界面通常是由操作器、显示器和摄像头组成,并通过控制器和机器人控制软件,将用户的指令转化为控制机器人的指令。
遥操作系统的系统架构中,机器人控制部分包括了机器人本身、控制器以及控制算法。
其中,控制器负责机器人的动力、通讯和感知等任务,而控制算法则负责的是控制机器人各种动作和运动的规划和执行。
同时,传感器也是遥操作控制系统中不可或缺的部分。
机器人通过传感器获取周围环境的信息,以便识别和感知,这项技术也被称为“遥感技术”。
三、机器人遥操作控制系统的基本设计流程机器人遥操作控制系统的设计流程包括以下步骤:1.需求分析:根据机器人的功能和控制需求,确定遥操作控制系统的功能和技术指标。
同时,需求分析阶段还需要考虑安全性、可靠性和维护性等方面。
2.硬件设计:包括遥操作器、控制器和机器人本身等硬件设备的设计和制造。
3.软件设计:设计并开发控制机器人的软件,需要考虑到机器人的运动控制、传感器数据处理和通信等方面。
4.系统集成:将硬件和软件进行集成测试,测试各个部分之间的协同工作,并优化设计方案和控制算法。
一种移动机器人遥操作接口系统的设计与实现
一种移动机器人遥操作接口系统的设计与实现作者:侯保民冯健翔杜芳王俊锋郭小强侯海英来源:《现代电子技术》2009年第10期摘要:针对移动机器人的远程操作问题,基于C++ Builder软件环境,设计和实现了一种移动机器人的遥操作接口系统,可利用方向盘、键盘和鼠标来操作机器人的移动。
基于此接口系统建立了遥操作系统原型,并且进行了室内试验。
室内试验表明,此遥操作接口系统具有简便、界面友好等特点。
关键词:遥操作;人机接口;移动机器人;软件环境中图分类号:TP311文献标识码:A文章编号:1004-373X(2009)10-034-02Design and Implement of Teleoperation Interface System for Mobile RobotHOU Baomin,FENG Jianxiang,DU Fang,WANG Junfeng,GUO Xiaoqiang,HOU Haiying(Academy of Equipment Command & Technology,Beijing,101416,China)Abstract:To resolve the teleoperation problem for a mobile robot,a kind of human-machine interface systembased on the C++ Builder software environment is designed.It can operate movement of the robot in three operation modes:steering wheels,keyboard and mouse.Based on it,a teleoperation system prototype is constructed and implemented.and it is tested in the laboratory.The experimentation in doors indicates that the teleoperation interface system issimple,convenient,friendly and so on.Keywords:teleoperation;human-machine interface;mobile robot;software environment0 引言遥操作就是远距离操作,是在远方人的行为动作远距离作用下,使事物产生运动变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人遥操作系统的设计与实现
一、概述
机器人遥操作系统是指通过计算机网络远程控制机器人运动并
进行操作的系统。
本文将阐述机器人遥操作系统的设计与实现,
包括硬件框架、软件平台以及网络通讯等方面。
二、硬件框架设计
机器人遥操作系统的硬件框架是系统实现的基础,其设计应考
虑到机器人的运动机构、传感器的布局以及数据传输。
一般而言,机器人遥操作系统的硬件框架需要包含以下几个部分:
1. 机器人动力控制模块
机器人控制模块是机器人运动的核心控制单元,包括电机、驱
动电路、控制器等,负责控制机器人的运动、停止、转向等操作。
2. 机器人传感器模块
机器人传感器模块是机器人的见、听、触感官,包括计量传感器、触摸传感器、影像传感器等,用于采集机器人周围环境的信息,为机器人提供能力支持。
3. 机器人数据传输模块
机器人数据传输模块负责将机器人传感器模块采集到的信息传
递给机器人控制中心,一般包括WiFi、蓝牙等传输手段,为机器
人远程控制提供技术支持。
三、软件平台设计
机器人遥操作系统的软件平台设计为机器人控制提供了支持。
软件平台缺乏稳定、高效的控制算法和控制程序,控制系统就无
法得到有效控制,因此软件平台的设计十分重要。
机器人遥操作
系统软件平台设计一般包括以下几个部分:
1. 控制算法设计
机器人遥控系统的控制算法设计是关键,它主要包括机器人运
动规划、运动控制和定位等方面。
控制算法的设计必须充分考虑
到机器人行走稳定性、精度,同时具有良好的响应速度和柔性控
制特性。
2. 控制程序设计
控制程序设计的核心是机器人操作界面,一般需考虑到交互性、实时性、安全性等方面。
此外,控制程序还应包括故障判断和系
统保护等控制功能。
3. 控制参数优化
机器人遥操作系统的控制参数需要根据不同的任务进行优化,
通常通过模拟机器人运动模型和实际测试等方式确定每个参数的
最优值。
四、网络通讯设计
机器人遥操作系统的网络通讯设计是实现遥控的必要条件,网
络通讯设计一般包括远程命令控制和视频传输等方面。
1. 远程命令控制
机器人遥操作系统一般采用基于TCP/IP协议的远程命令控制
方式,控制端软件向机器人发送指令并接收机器人采集到的信息。
2. 视频传输
机器人遥操作系统中,视频传输是实现远程操纵的重要手段。
视频传输需要满足高清晰度、实时性、稳定性等要求,一般采用
网络摄像头和基于网络传输的视频传输方式。
五、总结
机器人遥操作系统的设计与实现涉及到多个方面,其中硬件框架、软件平台和网络通讯等方面的设计都是十分重要的。
机器人
遥操作系统尤其需要在技术上拥有优越的控制能力和人机交互方式,才能实现对复杂环境下机器人运动的真正遥控。