第二章 结构图等效化简
合集下载
2.4 系统框图及其等效变换
绘制图1所示 所示R-C网络的系统框图 例1 绘制图 所示 网络的系统框图
解: 1)列写该网络的运动方程
U r (s ) − U c (s ) 1 I (s ) = , U c (s ) = I (s ) R CS
2)画出上述两式对应的方框图 3)将两方框图按信号的流向依次 连接,求得c为系统的方框图 图1 R-C网络
G (s )H ( s ) G (s ) = = 1 + G (s )H ( s ) 1 + G (s )
C R (s ) U (s ) G (s )的分子 = = R(s ) V (s ) + U (s ) G (s )的分母 + G (s )的分子
2012-5-2 第二章 控制系统的数学模型
(2 - 51)
正反馈
2012-5-2
+
G1 ( s) G(s) = 1 − G1 ( s ) H ( s )
第二章 控制系统的数学模型 11
图6 环节的反馈连接
2012-5-2
第二章 控制系统的数学模型
12
如果H(s)=1,称为单位反馈系统
C (s ) R (s )
U (s ) 若令G (s ) = , 则上式改写为 V (s )
R2
图2 R-C滤波网络
,
1 U c (s ) = I 2 (s ) C 2s
2)画出上述四式对应的方框图,如图2 a所示 3)根据信号的流向,将各方框单元依次连接起来,就得到 图2 b所示的方框图
2012-5-2 第二章 控制系统的数学模型 7
图3 图 2 所示电路的系统框图
2012-5-2 第二章 控制系统的数学模型 8
1. 化简的关键是解除环路与环路的交叉 或形成大环 化简的关键是解除环路与环路的交叉,或形成大环 套小环的形式. 套小环的形式 2. 解除交叉连接的有效方法是移动比较点或引出点. 解除交叉连接的有效方法是移动比较点或引出点 要向同类移动
第2章 力系的等效简化

2
My Mx cos cos M M
cos
Mz M
S D
例题2.2 五面体作用三个力偶, F1 F1 5N,F2 F2 10N, a 0.2m, 求三个力偶的合成结果。 F3 F3 10 2 N,
m 解: M x F1a F3a sin 45 1N ·
R 2 x 2 cos R 2 4 4
3.整体重心的x坐标:
弧线边重心的x坐标:
x1
R cos Rd
4 4
3 2R xC 4
R
2
2 2
R
S D
主矢:FR = F1 + F2 + + Fn = Fi
M = Mo F 1 + Mo F 2 + + Mo F n = Mo Fi 主矩:
S D
2. 空间任意力系的简化结果讨论 1)主矢 FR = ,主矩 M o 。原力系简化为一个合力偶。
2)主矢 FR ,主矩 M o 。力系简化一合力。
例:平面固定支座约束力分析
FAy
合力投影定理
A
MA FAx
S D
3 6 例题2.3 已知水压力 F1 8 10 N , 泥沙压力 F2 15010 N ,
坝重 W 10106 N , 试将三力向O点简化最后结果。
解: 主矢
FRx F1 F2 8.15 10 N
6
FRy W 10 10 6 N
S D
2.1 力系的分类 二.力偶系 作用于刚体的一群力偶称为力偶系。若力偶系中的各力偶 都位于同一平面。则为平面力偶系,否则为空间力偶系。
自动控制原理课后答案,第二章(西南科技大学)

第2章 控制系统的数学模型
思考题:双RC网络 课题练习:2-9 作业题: 2-2、2-4、2-5、2-7、2-11、2-14 精讲例题:2-12
思考题:求双 RC 网络图的微分方程、传递函数来自解:ui i1R1 u
u 1
C1
iC dt
R1
R2
i1
ic i2
ui
C1 u C2
uo
uo
1 C2
dt
R
R2C
2
d
2uC (t dt2
)
3RC
duC (t dt
)
uC
(t)
R
2C
2
d
2ur (t dt2
)
2RC
dur (t dt
)
ur
(t
)
(d) 解:列微分方程组得
ur
(t)
uc
(t)
1 C
i1dt
ur (t) uc (t) (i2 i1)R
i1 C
i2
RR
ur
C ic
uc
(d)
uc
(t
)
i1R
1 C
icdt
ic i1 i2
微分方程为:
R 2C 2
d
2uc (t) dt2
3RC
duc (t) dt
uc (t)
R2C
2
d
2ur (t) dt2
2RC
dur (t) dt
ur
(t)
2-4 若某系统的单位阶跃响应为c(t)=1-2e-2t+e-t, 试求 系统的传递函数和脉冲响应。
1 G1G2 G1G2G3 (1
1
)
1 G1G2 G1
思考题:双RC网络 课题练习:2-9 作业题: 2-2、2-4、2-5、2-7、2-11、2-14 精讲例题:2-12
思考题:求双 RC 网络图的微分方程、传递函数来自解:ui i1R1 u
u 1
C1
iC dt
R1
R2
i1
ic i2
ui
C1 u C2
uo
uo
1 C2
dt
R
R2C
2
d
2uC (t dt2
)
3RC
duC (t dt
)
uC
(t)
R
2C
2
d
2ur (t dt2
)
2RC
dur (t dt
)
ur
(t
)
(d) 解:列微分方程组得
ur
(t)
uc
(t)
1 C
i1dt
ur (t) uc (t) (i2 i1)R
i1 C
i2
RR
ur
C ic
uc
(d)
uc
(t
)
i1R
1 C
icdt
ic i1 i2
微分方程为:
R 2C 2
d
2uc (t) dt2
3RC
duc (t) dt
uc (t)
R2C
2
d
2ur (t) dt2
2RC
dur (t) dt
ur
(t)
2-4 若某系统的单位阶跃响应为c(t)=1-2e-2t+e-t, 试求 系统的传递函数和脉冲响应。
1 G1G2 G1G2G3 (1
1
)
1 G1G2 G1
第二章结构图化简

•时滞环节
微分方程:Xo(t)= Xi(t -τ) 传递函数:G(S)= e –τs 具体对象: 延时环节
延迟环节是一个非线性的函数,有延迟的系统是很难分 析和控制的。为简单起见,化简如下:
es
1 es
1 1
1s ... 1s
4.建立复杂系统的传递函数: • 由系统的微分方程取拉氏变换 • 电路系统,由复阻抗直接建立 • 动态结构图化简
f (0)
L
d
2f dt
(t
2
)
s2F(s)
sf
(0)
f
' (0)
从微分方程模型到传递函数
RC
du c
u
u
dt
c
r
设初始值uc(0)=0
(RCs 1)U (s) U (s)
c
r
U (s) c
1
U (s) RCs 1
r
2.零初始条件的含义:
•输入作用是在t=0 以后才作用于系统,
r(0) r(0) r(0) 0
1t
1t 1t
uc C'e RC ure RC e RC
1t C'e RC ur
Ur(t) 1
0
Uc(t) 1
t
t
0
方法2. 用拉氏变换求解线性微分方程
Laplace变换
L[f(t)]=F(s) 从时域→复域
定义: 举例:
F(s) f (t)estdt
0
f (t) 1(t)
F(s) estdt 1 est 1
2
1
s
RC
RC c
s 1
s RC
u
(t )
1(t )
自动控制原理02结构图及其等效变换课件

G1 (s)
N (s)
G2 (s)
C (s)
B(s) H (s)
(1)R(s)作用下的系统闭环传递函数
此时, N(s) 0
R(s) E(s)
G1 (s)
B(s)
G2 (s) C1(s)
(s) C1(s) R(s)
H (s)
C1
(s)
(s)R(s)
1
G1 (s)G2 (s) G1 (s)G2 (s)H
d)
2.3.3 结构图的等效变换和简化
例2-9 R(s)
G2G3G4
C(s)
G1
1 G2G3H1 G3G4H 2
e)
R(s)
G1G2G3G4
C(s)
1G1G2G3G4 G2G3H1 G3G4H 2
f)
2.3 控制系统的结构图及等效变换
2.3.4 系统传递函数
典型闭环控制系统 的结构图:
R(s) E(s)
I (s)
1 Ls U L (s)
U0
(s)
1 Cs
I (s)
Ui (s)
UL (s) UR (s)
Uo (s)
a)
UR (s) 1/ R I (s)
b)
UL (s) 1/ Ls I (s)
c)
I (s) 1 / Cs U o (s)
d)
2.3.2 结构图的建立
例2-7 按照信号的流向将以上各个环节连接起来。就构成了 系统的动态结构图。
(6)多个比较点与引出点的交换与合并
R(s)
C(s)
G(s)
B1(s) B2(s) a)
R(s)
C(s)
G(s) R(s)
R(s)
N (s)
G2 (s)
C (s)
B(s) H (s)
(1)R(s)作用下的系统闭环传递函数
此时, N(s) 0
R(s) E(s)
G1 (s)
B(s)
G2 (s) C1(s)
(s) C1(s) R(s)
H (s)
C1
(s)
(s)R(s)
1
G1 (s)G2 (s) G1 (s)G2 (s)H
d)
2.3.3 结构图的等效变换和简化
例2-9 R(s)
G2G3G4
C(s)
G1
1 G2G3H1 G3G4H 2
e)
R(s)
G1G2G3G4
C(s)
1G1G2G3G4 G2G3H1 G3G4H 2
f)
2.3 控制系统的结构图及等效变换
2.3.4 系统传递函数
典型闭环控制系统 的结构图:
R(s) E(s)
I (s)
1 Ls U L (s)
U0
(s)
1 Cs
I (s)
Ui (s)
UL (s) UR (s)
Uo (s)
a)
UR (s) 1/ R I (s)
b)
UL (s) 1/ Ls I (s)
c)
I (s) 1 / Cs U o (s)
d)
2.3.2 结构图的建立
例2-7 按照信号的流向将以上各个环节连接起来。就构成了 系统的动态结构图。
(6)多个比较点与引出点的交换与合并
R(s)
C(s)
G(s)
B1(s) B2(s) a)
R(s)
C(s)
G(s) R(s)
R(s)
理论力学 第二章 力系的等效简化(20P) (2)

矩形均布载荷: 矩形均布载荷:
Fq = ql
三角形分布载荷: 三角形分布载荷:
1 Fq = ql 2
AB的分布载荷对 例7:如图所示,求作用于悬臂梁AB的分布载荷对A点 :如图所示,求作用于悬臂梁AB的分布载荷对A 的矩。 的矩。 解:
L 2L M A = − Fq1 − Fq 2 2 3 1 2 = − (q1 + 2q2 )L 6
V
A
A 积分法 A A 均质细杆: 长度L×截面积A) 均质细杆:P=γLS, (比重γ ×长度 ×截面积 比重
∫ =
A
xd A
∫ =
A
yd A
∫ =
A
zd A
xc=∑Li xi/L ∑
yc=∑Li yi/L ∑
zc=∑Li zi/L ∑
∫ =
L
xd L L
积分法
∫ =
L
ydL L
∫ =
L
L
zdL L
OO′ = d = FR × M O
2 FR
2、平面任意力系的简化
F1 A1 A2 An
主矢: 主矢: 主矢, 主矢,主矩
F2 Fn
F1 M1
=
简化中心
M2 F2 Mn O
Fn
=
附加力偶
FR MO
F R = Σ Fi
FRx = ∑ Fix FRy = ∑ Fiy
FRX FRY cos α = , sin α = FR FR
合力: 合力:
Fq = ∫ q ( x )d x
b
作用点: 作用点:
xc
∫a q( x )dx ⋅ x =
Fq
a b
∫a xq( x )dx = b ∫a q( x )dx
第二章 (2.3,2,4)动态结构图、反馈系统的传递函数
研究控制系统的性能,主要的传 递函数为: 一、系统的开环传递函数 一、系统的开环传递函数 二、系统的闭环传递函数 二、系统的闭环传递函数 三、系统的误差传递函数 三、系统的误差传递函数
一、系统的开环传递函数
D(s)
闭环控制 系统的典型 结构:
R(s)
E(s) E(s)
_
B(s)
G1(s)
+
C(s) G2(s)
Y2(s)
(3) 反馈
R(s)
G(s) H(s)
C(s)
R(s)
C(s) G( s) ( s) 1 H ( s)G ( s)
C ( s ) E ( s ) G( s ) [ R( s) C ( s) H ( s)]G ( s)
C ( s) G( s) ( s) R( s) 1 H ( s)G ( s)
H2 G1 G2 H1
1 G4
G3 a G4 H3
b
例2:综合点移动
综合点与引出 点互换位置了
G 33 G G 11 G
G2
G 22 G H 11 H
错! 向同类移动
1并联
G3 G1
3串联
2反馈
G2 H1
G1
G4 G1 H1 输入 G1 H1 H1
两个
例3 作用分解
G2
a b
两个 输出
G3 H3
4
绘制双T网络结构图
R1
U1(s)
R2
urr(t) U (s)
I1(s)
sc1
I2(s)
1 C 1
I2(s)
sc2
1 C 2
ucc(t) U (s)
Ur(s)
一、系统的开环传递函数
D(s)
闭环控制 系统的典型 结构:
R(s)
E(s) E(s)
_
B(s)
G1(s)
+
C(s) G2(s)
Y2(s)
(3) 反馈
R(s)
G(s) H(s)
C(s)
R(s)
C(s) G( s) ( s) 1 H ( s)G ( s)
C ( s ) E ( s ) G( s ) [ R( s) C ( s) H ( s)]G ( s)
C ( s) G( s) ( s) R( s) 1 H ( s)G ( s)
H2 G1 G2 H1
1 G4
G3 a G4 H3
b
例2:综合点移动
综合点与引出 点互换位置了
G 33 G G 11 G
G2
G 22 G H 11 H
错! 向同类移动
1并联
G3 G1
3串联
2反馈
G2 H1
G1
G4 G1 H1 输入 G1 H1 H1
两个
例3 作用分解
G2
a b
两个 输出
G3 H3
4
绘制双T网络结构图
R1
U1(s)
R2
urr(t) U (s)
I1(s)
sc1
I2(s)
1 C 1
I2(s)
sc2
1 C 2
ucc(t) U (s)
Ur(s)
《自动控制原理》第二章传递函数
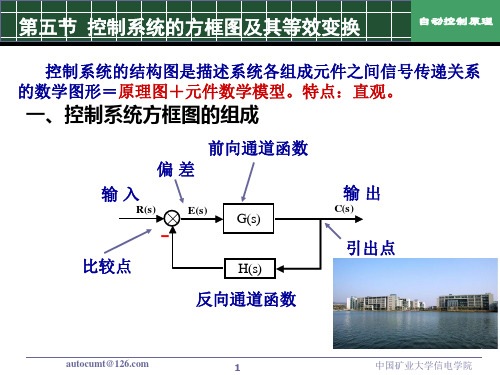
一、控制系统方框图的组成
方框图(结构图)的四要素:
R( s)
G (s) C (s)
自动控制原理
R (s ) +
R( s) C ( s)
c(t )
C (s) C (s)
r (t )
C (s)
R( s)
(d )
(a)
(b)
(c )
(1)方框(方块):表示输入到输出单向传输间 的函数关系。
r(t)
R (s) G (s)
1 R2
I 2 (s)
U 2 (s)
U 3 (s)
U1 ( s )
1 I1 ( s ) R1
I 2 (s)
1 U 3 (s) sC1
1 R2
I 2 ( s) 1 U 2 (s) sC2
autocumt@
7
中国矿业大学信电学院
一、控制系统方框图的组成
建立方框图的步骤:
自动控制原理
H3
H3
二、系统方框图的等效变换和化简
自动控制原理
例2.21
用方框图的等效法则,求如图所示 系统的传递函数C(s)/R(s)
解:这是一个具有交叉反馈的多回路系统,如果不对它作 适当的变换,就难以应用串联、并联和反馈连接的等效变 换公式进行化简。本题的求解方法是把图中的点A先前移 至B点,化简后,再后移至C点,然后从内环到外环逐步 化简,其简化过程如下图。
X(s) Y(s) Z(s) C(s) X(s) Z(s)
自动控制原理
C(s) Y(s)
(7)引出点之间互移
X(s)
a
b
C(s) Z(s)
X(s)
a
b
C(s) Y(s) C(s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 飞豹战机的俯仰角控制系统是由中航工业西安飞行自动控制研究所主持研制的。
其系统的
简化结构图如图1所示,试求其闭环传递函数()/()C s R s 。
(等效化简or Mason 均可,都用也行,但不加分)。
飞机
陀螺
()
R s ()
C s -
+
21
0.31
s s ++0.5
1
-0.421
s +0.4
0.7
s
K +
图1. 系统结构图
2. 某控制系统的结构图如图2,试求其闭环传递函数()/()C s R s 与()/()C s N s (等效化简or
Mason 均可,都用也行,但不加分)。
()
R s ()
C s -
-
+
+
1
H 2
H 3
H 1G 2
G ()N s
图2. 系统结构图
厦门大学《自动控制原理》课程作业
航空航天学院 航 空 系 2018年级 飞动 专业
主讲教师: 董一巍 作业内容:(第五讲)
3.试求闭环传递函数()/()
C s R s(等效化简or Mason均可,都用也行,但不加分)。
)s
图3. 系统结构图。