结构图及其等效变换
合集下载
控制系统的结构图及其等效变换
2.
通路
沿支路箭头方向穿过各相 连支路的路径。
前向通路
从源节点到阱节点的通路上通过任何节点
不多于一次的通路。前向通路上各支路增益之 乘积,称前向通路总增益,一般用pk表示。
回路
起点与终点重合且通过任何节点不多于一次的
闭合通路。回路中所有支路增益之乘积称为回 路增益,用Lk表示。
不接触回路
相互间没有任何公共节点的回路
反馈通路断开。 系统开环传递函数:前向通道传递函数与反馈通道传 递函数的乘积。
B( s ) Gk ( s) G1 ( s)G2 ( s) H ( s) E (s)
(反馈信号B(s)和偏差信号E (s)之间的传递函数)
系统的开环传递函数
GK (s) G1 (s)G2 (s) H (s)
注:开环传递函数并非指开环控制系统的传递函数, 而是指闭环系统断开反馈点后整个环路的传递函数。
例2.9 简化下图,求出系统的传递函数。
解: 上图是具有交叉连接的结构图。为消除交叉,可采 用比较点、引出点互换的方法处理。 (1)将相加点a移至G2之后
(2)再与b点交换
(3)因 G4与G1G2并联, G3与G2H是负反馈环节
(4)上图两环节串联,函数相乘后得系统的传递函数为
注: ①以上为原系统的闭环传递函数,不是开环系统的传递函数, 而是闭环系统简化的结果; ②分母中不能看成原闭环系统的开环传递函数,闭环系统开 环传递函数应根据定义和具体框图定。
闭环系统的传递函数
反馈控制系统的典型结构 :
R( s) E (s) G1(s) B(s)
N (s)
G2(s)
C (s)
H(s)
输入量R(s)、干扰量N(s)同时作用于系统
系统结构图及等效变换、梅森公式
统结构图基础上应用等效变换和梅森 公式进行系统设计和实现,确保系统稳定性和可靠性。
05
结论与展望
BIG DATA EMPOWERS TO CREATE A NEW
ERA
研究结论
• 通过分析和比较不同系统结构图的特点和性能,本文得出了一些重要的结论。首先,等效变换在系统分析和设 计中具有重要的作用,它可以帮助我们简化复杂的系统结构,降低分析和设计的难度。其次,梅森公式是一种 有效的系统性能评估方法,它可以用于计算系统的传递函数和频率响应等关键性能指标。最后,通过实例分析 和仿真验证,本文证明了等效变换和梅森公式在系统分析和设计中的有效性和实用性。
案例一
分析一个简单的RC电路,利用梅 森公式计算其传递函数,并与实 验结果进行对比分析。
案例二
针对一个控制系统,利用梅森公 式分析其稳定性,并给出相应的 控制器设计建议。
案例三
考虑一个复杂的信号流图,利用 梅森公式进行化简,得到简化的 数学模型,便于后续分析和设计。
BIG DATA EMPOWERS TO CREATE A NEW ERA
案例分析
案例一
串联等效变换的应用。在某控制系统中,存在两个串联的控制器,通过串联等效变换,可以将这两个控制器 合并为一个等效控制器,从而简化系统分析。
案例二
并联等效变换的应用。在某电力系统中,存在两个并联的电源,通过并联等效变换,可以将这两个电源合并 为一个等效电源,方便进行系统性能评估。
案例三
反馈等效变换的应用。在某通信系统中,存在一个反馈环节,通过反馈等效变换,可以将该反馈环节进行简 化,使得简化后的系统与原系统在性能上保持一致。
系统结构图及等效变换、
BIG DATA EMPOWERS TO CREATE A NEW
05
结论与展望
BIG DATA EMPOWERS TO CREATE A NEW
ERA
研究结论
• 通过分析和比较不同系统结构图的特点和性能,本文得出了一些重要的结论。首先,等效变换在系统分析和设 计中具有重要的作用,它可以帮助我们简化复杂的系统结构,降低分析和设计的难度。其次,梅森公式是一种 有效的系统性能评估方法,它可以用于计算系统的传递函数和频率响应等关键性能指标。最后,通过实例分析 和仿真验证,本文证明了等效变换和梅森公式在系统分析和设计中的有效性和实用性。
案例一
分析一个简单的RC电路,利用梅 森公式计算其传递函数,并与实 验结果进行对比分析。
案例二
针对一个控制系统,利用梅森公 式分析其稳定性,并给出相应的 控制器设计建议。
案例三
考虑一个复杂的信号流图,利用 梅森公式进行化简,得到简化的 数学模型,便于后续分析和设计。
BIG DATA EMPOWERS TO CREATE A NEW ERA
案例分析
案例一
串联等效变换的应用。在某控制系统中,存在两个串联的控制器,通过串联等效变换,可以将这两个控制器 合并为一个等效控制器,从而简化系统分析。
案例二
并联等效变换的应用。在某电力系统中,存在两个并联的电源,通过并联等效变换,可以将这两个电源合并 为一个等效电源,方便进行系统性能评估。
案例三
反馈等效变换的应用。在某通信系统中,存在一个反馈环节,通过反馈等效变换,可以将该反馈环节进行简 化,使得简化后的系统与原系统在性能上保持一致。
系统结构图及等效变换、
BIG DATA EMPOWERS TO CREATE A NEW
动态结构图及其等效变换
再进行内回路反馈和并联变换,得下图。
22
N1 +
解:
(2)求C/N1,设R=0,N2=0, 得右图。
C(s) G3(1 G2 ) N1(s) 1 G2 G1G2G3
23
解(3)求C(s)/N2(s),设R=0,N1=0,得下图。
则:
0 N2(s) C(s)
C(s) 1 N2 (s)
24
X(s)
X(s)
R(s)
C(s)
R(s)
C(s)
Y(s)
C(s) R(s) X (s) Y (s)
Y(s)
C(s) R(s) Y (s) X (s)
7. 相邻的比较点和引出点之间可以调换位置,如下图 所示。
17
相邻引出点之间的移动
R(s)
R(s)
R(s)
R(s) C(s)
R(s)
R(s) R(s)
动态结构图及其等效变换
1
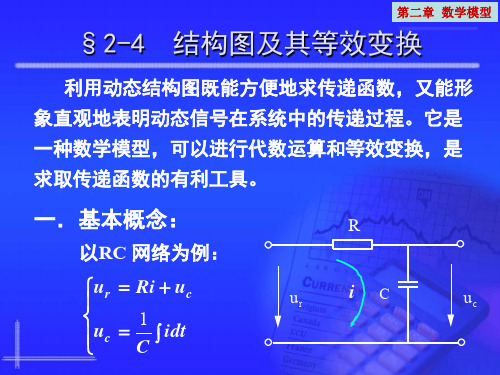
§ 2.3 动态结构图及其等效变换
一、动态结构图(方块图) 1.定义
动态结构图是图形化的数学模型,它是一种系 统输入和输出之间因果关系的简略图示方法,表示 了系统输出、输入信号之间的动态传递关系。
2
2. 组成要素 传递方块: 表示输入、输出信号之间的传递关系 C(s)=G(s)E(s),B(s)=H(s)C(s)
(s) )
RI CsU
(s) I(s) c (s) Uc (
s)
1 R
U r
1 Cs
( I
s) (s)
U
c
(
s)
绘制上式各子方程的方框图:
r ( s ) r ( s ) - c ( s ) r ( s ) - c ( s ) I ( s ) I ( s ) c ( s )
22
N1 +
解:
(2)求C/N1,设R=0,N2=0, 得右图。
C(s) G3(1 G2 ) N1(s) 1 G2 G1G2G3
23
解(3)求C(s)/N2(s),设R=0,N1=0,得下图。
则:
0 N2(s) C(s)
C(s) 1 N2 (s)
24
X(s)
X(s)
R(s)
C(s)
R(s)
C(s)
Y(s)
C(s) R(s) X (s) Y (s)
Y(s)
C(s) R(s) Y (s) X (s)
7. 相邻的比较点和引出点之间可以调换位置,如下图 所示。
17
相邻引出点之间的移动
R(s)
R(s)
R(s)
R(s) C(s)
R(s)
R(s) R(s)
动态结构图及其等效变换
1
§ 2.3 动态结构图及其等效变换
一、动态结构图(方块图) 1.定义
动态结构图是图形化的数学模型,它是一种系 统输入和输出之间因果关系的简略图示方法,表示 了系统输出、输入信号之间的动态传递关系。
2
2. 组成要素 传递方块: 表示输入、输出信号之间的传递关系 C(s)=G(s)E(s),B(s)=H(s)C(s)
(s) )
RI CsU
(s) I(s) c (s) Uc (
s)
1 R
U r
1 Cs
( I
s) (s)
U
c
(
s)
绘制上式各子方程的方框图:
r ( s ) r ( s ) - c ( s ) r ( s ) - c ( s ) I ( s ) I ( s ) c ( s )
控制系统结构图及其等效转换
U (s) R I(s)
0 2
1 c
i dt R i
2
1 1
R I (s)
1 1
1 Cs
I (s )
2
由 (1) 式有
I1(s) + I(s)
+ I (s) 2
对 (2)式变换 1 I1 ( s ) [U i ( s ) U 0 ( s )] R
对(4)式变换 I 2 ( s) R1CsI1 ( s)
G7
解 : 将分支点 A移至B处
G6 G1 G2
-
-
G3 G4 G5
G4
G7 得系统的闭环传递函数为
G1G2 G3G4 (S ) 1 + G1G2G3G4 G7 + G3G4G5 + G2 G3G6
另外亦可把B点后移或者相加点后移
X1(s) G1(s)
X3(s) G2(s)
X2(s)
结论:二环节串联传递函数等于二传函之积。 推广:N环节串联,传递函数等于N个环节传 函之积。
G(s) G1 (s)G2 (s)G n (s)
2、并联连接的传递函数
X3(s) G1(s) + X2(s)
X1(s)
+
G2(s) X4(s)
X 2 (s) X 3 ( s) + X 4 ( s) G(s) G1 ( s) + G2 ( s) X1 (s) X 1 ( s)
+ UI(s) U0(s)
1/R I1(s) I2(s) Cs
R1 I1(s)
对(3)式有
I(s)
R2
U0(s)
Ui(s) U0(s) -
I1(s)
自动控制原理_第二章
Gk ( s) G ( s) H ( s)
B( s) G1 ( s)G2 ( s) H ( s) E ( s)
注意:这里的开环传递函数是针对闭环系统而言的,而不是指开环系 统的传递函数。
解:首先对小车进行受力分析,在水平方向应 用牛顿第二定律可写出:
dy(t ) d 2 y (t ) F (t ) f Ky (t ) m dt dt 2
令
2
T
m f , 可得 K 2 mK
图2 弹簧-质量-阻尼器系统图
d 2 y( t ) dy(t ) F (t ) T 2 T y ( t ) dt 2 dt K
用解析法列写系统或元部件微分方程的一般步骤是:
(1)根据系统的具体工作情况,确定系统或元部件的输
入、输出变量;
(2)从输入端开始,按照信号的传递顺序,依据各变量 所遵循的物理(或化学)定律,列写出各元部件的动态方程, 一般为微分方程组; (3)消去中间变量,写出输入、输出变量的微分方程; (4)将微分方程标准化。即将与输入有关的各项放在等 号右侧,与输出有关的各项放在等号左侧,并按降幂排列。
以工作点处的切线代替曲线,得到变量在工作点的增量方程, 经上述处理后,输出与输入之间就成为线性关系。
二、复频域模型 – 传递函数
(1)利用时域卷积获得:
如果已知系统单位脉冲响应为g(t),则任意输入r(t)的响应输出c(t):
c( t )
r ( ) g(t )d
c(t ) r ( ) g(t )d
0 t
考虑到物理可实现性,上式改为: 对上式做拉氏变换得:
C ( s) R( s)G( s) G( s)
C ( s) R( s )
自动控制原理结构图及等效变换
[定义]:表示变量之间数学关系的方块图称为动态结构图或结 构图。
[例]:结构: X(t) 放大器 结Y(构t) 图:
X(s)
Y(s)
G(s)=K
微分方程:y(t)=kx(t)
若已知系统的组成和各部分的传递函数,则可以画出各个部 分的结构图并连成整个系统的结构图。
Thursday, August 13, 2020
X (s) G(s) Y (s)
X 2 (s)
X1(s)
相加点和分支点在一般情况下,不能互换。
X (s)
X 3 (s)
G(s)
X (s)
X 3 (s)
G(s)
X 2 (s)
X 2 (s)
所以,一般情况下,相加点向相加点移动,分支点向分支
点移动。
Thursday, August 13, 2020
12
K3
ua (s)
Ku TaTms Tms 1
u f (s)
Kf
- (s)
在结构图中,不仅能反映系统的组成和信号流向,还能表 示信号传递过程中的数学关系。系统结构图也是系统的数学模 型,是复域的数学模型。
Thursday, August 13, 2020
5
结构图的等效变换
二、结构图的等效变换:
[定义]:在结构图上进行数学方程的代数运算。 [原则]:变换前后环节的数学关系保持不变。
K2
(s
1)
ua (s) u2 (s)
K3
u1(s) K2(s 1) u2 (s)
u2 (s)K3 ua (s)
Thursday, August 13, 2020
3
反馈环节:
u f (s) (s)
(自动控制原理)2.4控制系统的结构图及其等效变换
实例二:复杂控制系统的等效变换
总结词
通过等效变换简化复杂控制系统的结构图,便于分析。
详细描述
以一个包含多个回路和元件的液压控制系统为例,介绍如何 通过等效变换简化其结构图。通过合并、化简等步骤,将复 杂的结构图简化为易于分析的形式,以便更好地理解系统的 工作原理和控制性能。
实例三:实际应用中的控制系统等效变换
控制系统的性能指标
总结词
控制系统的性能指标是用来评估控制系统性能优劣的一系列参数。常见的性能指标包括稳定性、快速 性、准确性等。
详细描述
稳定性是指控制系统在受到扰动后能够恢复到原来的平衡状态的能力。快速性是指控制系统对于输入 信号的响应速度。准确性是指控制系统对于输入信号的跟踪精度。这些性能指标可以通过数学分析和 实验测试等方法进行评估。
不断调整和完善结 构图,确保其准确 反映系统的工作原 理。
结构图的基本元件及其作用
控制器
根据设定值与实际值的偏差, 计算出控制量并输出给执行器。
被控对象
需要被控制的设备或系统,如 温度、压力、流量等。
传感器
用于检测被控对象的参数变化, 并将检测到的信号转换为电信 号或数字信号输出。
执行器
根据控制器输出的控制量,驱 动被控对象进行相应的动作或 调节。
课程背景
自动控制原理是自动化专业的一门核心课程,主要介绍控制系统的基本原理、分 析和设计方法。
本节内容是该课程的重要章节之一,通过学习结构图及其等效变换,学生可以深 入理解控制系统的组成和动态行为,为后续章节的学习打下基础。
02 控制系统的基本概念
控制系统的定义
总结词
控制系统的定义是指通过一定的控制装置,对被控对象施加控制作用,从而使 被控对象的输出量按照预期的规律变化的过程。
自动控制原理2.4 结构图及其等效变换1.4 结构图及其等效变换
u R1
i1
u R1 R1
ur
i2
C
duR1 dt
uc iR2 (i1 i2 )R2
R1
R2
uc
结构图(续)
第二章 数学模型
U R1 (s) U r (s) U c (s) 1
I1 (s) R1 U R1 (s)
I 2 (s) CSU R1 (s) I(s) I1(s) I2(s) U c (s) R2 I (s)
-
(s)
Kf
三、结构图的等效变换:
第二章 数学模型
建立结构图的目的是求系统传递函数,对系统性能
进行分析。所以对于复杂的结构图就需要进行运算
和变换,设法将其化为一个等效的方框,其中的数
学表达式即为总传递函数。这一步骤相当于对方程
消元。
R
C
G
总传递函数
等效原则:
变换前后,输入输出总的数学关系应保持不变
Uc (s)
则
1
U ( s)
I(s)) 1
I(s)
R
R
及U c (s)
1 Cs
I(s)
(3)
I(s)
1 Uc (s) Cs
结构图(续)
第二章 数学模型
1.定义:由具有一定函数关系组成的、并标明信号 传递方向的系统方框图称为动态结构图。
2.组成:4个基本单元。
①信号线:带箭头的直线,表示信号传递的方向,
线上标注信号所对应的变量,信号传递
具有单向性。 X
②引出点:信号引出或测量的位置,从同一信号线
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
K1
u1 ( s)
运放Ⅱ: u2 ( s) K 2 (s 1) u1 ( s)
功放环节:
ua ( s) K3 u2 ( s)
u1 ( s)
K 2 (s 1)
u2 ( s )
u2 ( s )
K3
ua ( s )
3
Sunday, November 04, 2018
反馈环节:
电动机环节:
X 1 ( s)
X 2 ( s)
G (s) Y ( s)
X 1 ( s)
X 2 ( s)
G (s) N (s)
Y ( s)
N (s) ? Y (s) [ X 1 (s) X 2 (s)]G(s), 又 : Y (s) X (s)1 G(s) X 2 (s) N (s), N (s) G(s)
H (s)
Y ( s ) E ( s )G ( s ) E ( s ) X ( s ) H ( s )Y ( s ), Y (s) G ( s) G (s) X ( s) 1 G ( s) H (s)
Sunday, November 04, 2018
7
信号相加点的移动
(二)信号相加点和分支点的移动和互换: 如果上述三种连接交叉在一起而无法化简,则要考虑移动某 些信号的相加点和分支点。 ①信号相加点的移动: 把相加点从环节的输入端移到输出端
X (s)
G1 ( s ) G1 ( s )
…
Gn (s)
Y ( s)
环节的并联:
反馈联接:
n Y ( s) G( s) Gi ( s) X ( s) i 1
X ( s)
Y ( s)
X ( s) E ( s ) G ( s)
Y ( s)
Gn (s)
n Y ( s) G( s) Gi ( s ) X ( s) i 1
[定义]表示变量之间数学关系的方块图称为函数结构图或方块图。 [例]:结构:
X(t)
电位器
Y(t)
结构图:
X(s)
G(s)=K
Y(s)
微分方程:y(t)=kx(t)
若已知系统的组成和各部分的传递函数,则可以画出各个 部分的结构图并连成整个系统的结构图。 2
Sunday, November 04, 2018
结构图的基本概念
[例2-10].求例2-6所示的速度控制系统的结构图。各部分传递 函数见例2-8,罗列如下:
比较环节:
ue ( s ) u g ( s ) u f ( s )
u g (s)
u ( s )
f
ue ( s )
运放Ⅰ: u1 ( s ) K1 , ue ( s )
ue ( s )
第三节 结构图及其等效变换
Sunday, November 04, 2018
1
结构图的基本概念
一、结构图的基本概念: 我们可以用结构图表示系统的组成和信号流向。在引入传 递函数后,可以把环节的传递函数标在结构图的方块里,并把 输入量和输出量用拉氏变换表示。这时Y(s)=G(s)X(s)的关系可 以在结构图中体现出来。
U a ( s)
- ( s )
将上面几部分按照信号传递方向连接起来,形成下页 所示的完整结构图。通常将输入信号画在最左边,输出信 号画在最右边.
Sunday, November 04, 2018
4
结构图的基Байду номын сангаас概念
M c ( s)
K m (Ta s 1) TaTm s Tm s 1
u g ( s ) ue ( s )
u f ( s)
K1
u1 ( s)
K 2 (s 1)
u2 ( s )
K3
ua ( s )
Ku TaTm s Tm s 1
-
( s )
Kf
在结构图中,不仅能反映系统的组成和信号流向,还能表 示信号传递过程中的数学关系。系统结构图也是系统的数学模 型,是复域的数学模型。
Sunday, November 04, 2018
8
Sunday, November 04, 2018
信号相加点的移动和互换
把相加点从环节的输出端移到输入端:
X 1 ( s)
X 2 ( s)
G (s)
Y ( s)
X 1 ( s)
X 2 ( s)
N (s)
G (s)
Y ( s)
N ( s) ? Y ( s) X 1 ( s)G ( s) X 2 ( s), Y ( s) X 1 ( s)G ( s) X 2 ( s) N ( s)G ( s), 1 N ( s) G (s)
[注意]: 相临的信号相加点位置可以互换而不改变其等效性;见下例
X 1 ( s) X 2 ( s)
Sunday, November 04, 2018
9
信号分支点的移动和互换
②信号分支点的移动: 分支点从环节的输入端移到输出端
X 1 ( s)
G (s)
Y ( s)
X 1 ( s)
X 1 ( s)
G (s) N (s)
Y ( s)
X 1 ( s)
N ( s) ? 1 X 1 ( s)G ( s) N ( s) X 1 ( s), N ( s) G( s)
u f ( s) ( s)
Kf
(TaTm s 2 Tm s 1)( s) K u ua ( s) K m (Ta s 1) M c ( s)
M c ( s)
( s ) K u f ( s )
3
K m (Ta s 1) TaTm s 2 Tm s 1 Ku TaTm s 2 Tm s 1
Sunday, November 04, 2018
10
信号相加点和分支点的移动和互换
分支点从环节的输出端移到输入端:
X 1 ( s)
G (s)
Y ( s) Y ( s)
X 1 ( s)
G (s) N (s)
Y ( s) Y ( s)
N (s) ? X1 (s)G(s) Y (s), X1 (s) N (s) Y (s), N (s) G(s)
5
结构图的等效变换
二、结构图的等效变换: [定义]:在结构图上进行数学方程的运算。
[类型]:①环节的合并;
--串联 --并联 --反馈连接 ②信号分支点或相加点的移动。 [原则]:变换前后环节的数学关系保持不变。
Sunday, November 04, 2018
6
环节的合并
(一)环节的合并:有串联、并联和反馈三种形式。 环节的串联: