图搜索问题求解--实验报告
图搜索问题求解(二)
0
1
1
1
1
0
0
1
1
1
0
0
0
1
0
1
1
1
0
0
0
0
0
0
[实现提示]
可使用回溯方法,即从入口出发,顺着某一个方向进行探索,若能走通,则继续往前进;
否则沿着原路退回,换一个方向继续探索,直至出口位置,求得一条通路。假如所有可能的
通路都探索到而未能到达出口,则所设定的迷宫没有通路。
二实验过程记录:
1、打开Eclipse,新建一个public Position文件,输入如下函数代码:
pos =stack.pop();
newPos.push(pos);
}
}
/*
*图形化输出路径
* */
String resault[][]=newString[row+1][col+1];
for(intk=0;k<row;++k){
for(intt=0;t<col;++t){
resault[k][t]=(maze[k][t])+"";
p[i - 1][j] =true;
stack.push(newPosition(i - 1, j));
i--;
}else{
stack.pop();
if(stack.empty()){
break;
}
i =stack.peek().row;
j =stack.peek().col;
}
}
Stack<Position> newPos =newStack<Position>();
实验二图搜索问题求解
1. 掌握Turbo prolog软件编程方法; 2. 熟悉状态图搜索的基本算法; 3.掌握图搜索问题求解中的问题表示、节点
表示、close表和open表的构造。
实验内容
以求交通图中两地之间的路径和最短路径问 题为例,分别用状态图搜索和代价树搜索, 进行问题求解。
下图是某一城市的交通网络。 边的方向表示允许的通行方向。 边旁的权数表示该边的长度。要求找出点 v1 至 v5 的所有路径,
并找出最短路径。
实验方法和步骤
1. 启动prolog编辑环境; 2. 用图搜索搜索思想编辑路径求解问题的源
程序; 2. 运行程序,分析结果; 3. 用代价树搜索思想编辑最短路径求解问题
的源程序; 4.运行程序,分析结果。
实验报告要求
实验题目 实验目的 实验环境 实验内容 实验结果(要求附上运行的源程序) 实验中出现的问题 对问题的解决方案 实验总结 路径问题求解的搜索结果及分析; 比较状态图搜索和代价树搜索的特点
turboprolog20加深学生对图搜索技术的理解使学生掌握图搜索基本编程方法并能利用图搜索技术解决一些应用问题
人工智能导论实验讲义
实验二 图搜索问题求解
河南科技大学 计算机实G 2.0 计划学时:4学时
实验目的
加深学生对图搜索技术的理解,使学生掌握 图搜索基本编程方法,并能利用图搜索技术 解决一些应用问题。
图的搜索与应用实验报告(附源码)(word文档良心出品)
哈尔滨工业大学计算机科学与技术学院实验报告课程名称:数据结构与算法课程类型:必修实验项目名称:图的搜索与应用实验题目:图的深度和广度搜索与拓扑排序设计成绩报告成绩指导老师一、实验目的1.掌握图的邻接表的存储形式。
2.熟练掌握图的搜索策略,包括深度优先搜索与广度优先搜索算法。
3.掌握有向图的拓扑排序的方法。
二、实验要求及实验环境实验要求:1.以邻接表的形式存储图。
2.给出图的深度优先搜索算法与广度优先搜索算法。
3.应用搜索算法求出有向图的拓扑排序。
实验环境:寝室+机房+编程软件(NetBeans IDE 6.9.1)。
三、设计思想(本程序中的用到的所有数据类型的定义,主程序的流程图及各程序模块之间的调用关系)数据类型定义:template <class T>class Node {//定义边public:int adjvex;//定义顶点所对应的序号Node *next;//指向下一顶点的指针int weight;//边的权重};template <class T>class Vnode {public:T vertex;Node<T> *firstedge;};template <class T>class Algraph {public:Vnode<T> adjlist[Max];int n;int e;int mark[Max];int Indegree[Max];};template<class T>class Function {public://创建有向图邻接表void CreatNalgraph(Algraph<T>*G);//创建无向图邻接表void CreatAlgraph(Algraph<T> *G);//深度优先递归搜索void DFSM(Algraph<T>*G, int i);void DFS(Algraph<T>* G);//广度优先搜索void BFS(Algraph<T>* G);void BFSM(Algraph<T>* G, int i);//有向图的拓扑排序void Topsort(Algraph<T>*G);/得到某个顶点内容所对应的数组序号int Judge(Algraph<T>* G, T name); };主程序流程图:程序开始调用关系:主函数调用五个函数 CreatNalgraph(G)//创建有向图 DFS(G) //深度优先搜索 BFS(G) //广度优先搜索 Topsort(G) //有向图拓扑排序 CreatAlgraph(G) //创建无向图其中 CreatNalgraph(G) 调用Judge(Algraph<T>* G, T name)函数;DFS(G)调用DFSM(Algraph<T>* G , int i)函数;BFS(G) 调用BFSM(Algraph<T>* G, int k)函数;CreatAlgraph(G) 调选择图的类型无向图有向图深 度 优 先 搜 索广度优先搜索 深 度 优 先 搜 索 广度优先搜索拓 扑 排 序程序结束用Judge(Algraph<T>* G, T name)函数。
图像检索实验报告
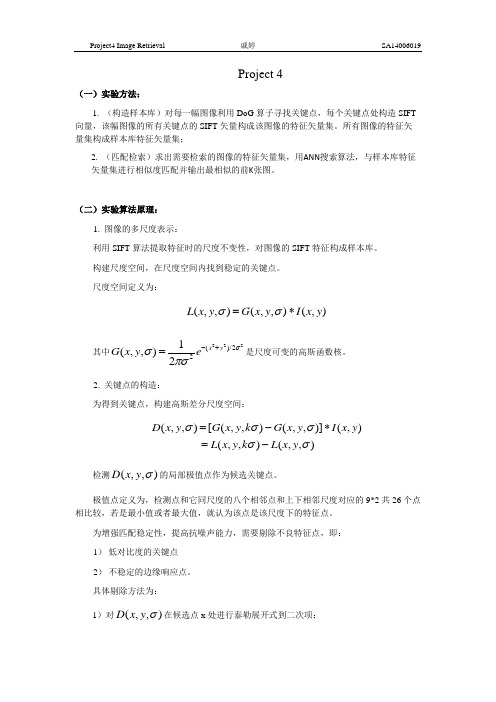
Project 4(一)实验方法:1. (构造样本库)对每一幅图像利用DoG 算子寻找关键点,每个关键点处构造SIFT 向量,该幅图像的所有关键点的SIFT 矢量构成该图像的特征矢量集。
所有图像的特征矢量集构成样本库特征矢量集;2. (匹配检索)求出需要检索的图像的特征矢量集,用ANN 搜索算法,与样本库特征矢量集进行相似度匹配并输出最相似的前K 张图。
(二)实验算法原理:1. 图像的多尺度表示:利用SIFT 算法提取特征时的尺度不变性,对图像的SIFT 特征构成样本库。
构建尺度空间,在尺度空间内找到稳定的关键点。
尺度空间定义为:(,,)(,,)(,)L x y G x y I x y σσ=*其中222()/221(,,)2x y G x y eσσπσ-+=是尺度可变的高斯函数核。
2. 关键点的构造:为得到关键点,构建高斯差分尺度空间:(,,)[(,,)(,,)](,)(,,)(,,)D x y G x y k G x y I x y L x y k L x y σσσσσ=-*=-检测(,,)D x y σ的局部极值点作为候选关键点。
极值点定义为,检测点和它同尺度的八个相邻点和上下相邻尺度对应的9*2共26个点相比较,若是最小值或者最大值,就认为该点是该尺度下的特征点。
为增强匹配稳定性,提高抗噪声能力,需要剔除不良特征点,即: 1) 低对比度的关键点 2) 不稳定的边缘响应点。
具体剔除方法为:1)对(,,)D x y σ在候选点x 处进行泰勒展开式到二次项:221(x)2T T D DD D x x x x x∂∂=++∂∂ 对其求极值得到212ˆD D x x x -∂∂=-∂∂,计算1ˆˆ()2DD x D x x ∂=+∂,若ˆ|()|0.3D x<则剔除。
2)计算Hessen 矩阵:边缘响应点剔除通过Hessen 矩阵来确定是否剔除:xxxy yx yy D D H D D ⎡⎤=⎢⎥⎣⎦222222(),(),()()()(1)()xx yy xx yy xy Tr H D D Det H D D D Tr H r r Det H r rαβαβαβαβαββ=+=+=-=+++===若该点不满足22()(1)()Tr H r Det H r+<则剔除。
深度优先搜索实验报告
深度优先搜索实验报告引言深度优先搜索(Depth First Search,DFS)是图论中的一种重要算法,主要用于遍历和搜索图的节点。
在实际应用中,DFS被广泛用于解决迷宫问题、图的连通性问题等,具有较高的实用性和性能。
本实验旨在通过实际编程实现深度优先搜索算法,并通过实际案例验证其正确性和效率。
实验中我们将以迷宫问题为例,使用深度优先搜索算法寻找从入口到出口的路径。
实验过程实验准备在开始实验之前,我们需要准备一些必要的工具和数据。
1. 编程环境:我们选择使用Python语言进行编程实验,因其语法简洁而强大的数据处理能力。
2. 迷宫地图:我们需要设计一个迷宫地图,包含迷宫的入口和出口,以及迷宫的各个路径和墙壁。
实验步骤1. 首先,我们需要将迷宫地图转化为计算机可处理的数据结构。
我们选择使用二维数组表示迷宫地图,其中0表示墙壁,1表示路径。
2. 接着,我们将编写深度优先搜索算法的实现。
在DFS函数中,我们将使用递归的方式遍历迷宫地图的所有路径,直到找到出口或者遇到墙壁。
3. 在每次遍历时,我们将记录已经访问过的路径,以防止重复访问。
4. 当找到出口时,我们将输出找到的路径,并计算路径的长度。
实验结果经过实验,我们成功地实现了深度优先搜索算法,并在迷宫地图上进行了测试。
以下是我们的实验结果:迷宫地图:1 1 1 1 11 0 0 0 11 1 1 0 11 0 0 0 11 1 1 1 1最短路径及长度:(1, 1) -> (1, 2) -> (1, 3) -> (1, 4) -> (2, 4) -> (3, 4) -> (4, 4) -> (5, 4)路径长度:7从实验结果可以看出,深度优先搜索算法能够准确地找到从入口到出口的最短路径,并输出了路径的长度。
实验分析我们通过本实验验证了深度优先搜索算法的正确性和有效性。
然而,深度优先搜索算法也存在一些缺点:1. 只能找到路径的一种解,不能确定是否为最优解。
常见算法设计实验报告(3篇)
第1篇一、实验目的通过本次实验,掌握常见算法的设计原理、实现方法以及性能分析。
通过实际编程,加深对算法的理解,提高编程能力,并学会运用算法解决实际问题。
二、实验内容本次实验选择了以下常见算法进行设计和实现:1. 排序算法:冒泡排序、选择排序、插入排序、快速排序、归并排序、堆排序。
2. 查找算法:顺序查找、二分查找。
3. 图算法:深度优先搜索(DFS)、广度优先搜索(BFS)、最小生成树(Prim算法、Kruskal算法)。
4. 动态规划算法:0-1背包问题。
三、实验原理1. 排序算法:排序算法的主要目的是将一组数据按照一定的顺序排列。
常见的排序算法包括冒泡排序、选择排序、插入排序、快速排序、归并排序和堆排序等。
2. 查找算法:查找算法用于在数据集中查找特定的元素。
常见的查找算法包括顺序查找和二分查找。
3. 图算法:图算法用于处理图结构的数据。
常见的图算法包括深度优先搜索(DFS)、广度优先搜索(BFS)、最小生成树(Prim算法、Kruskal算法)等。
4. 动态规划算法:动态规划算法是一种将复杂问题分解为子问题,通过求解子问题来求解原问题的算法。
常见的动态规划算法包括0-1背包问题。
四、实验过程1. 排序算法(1)冒泡排序:通过比较相邻元素,如果顺序错误则交换,重复此过程,直到没有需要交换的元素。
(2)选择排序:每次从剩余元素中选取最小(或最大)的元素,放到已排序序列的末尾。
(3)插入排序:将未排序的数据插入到已排序序列中适当的位置。
(4)快速排序:选择一个枢纽元素,将序列分为两部分,使左侧不大于枢纽,右侧不小于枢纽,然后递归地对两部分进行快速排序。
(5)归并排序:将序列分为两半,分别对两半进行归并排序,然后将排序好的两半合并。
(6)堆排序:将序列构建成最大堆,然后重复取出堆顶元素,并调整剩余元素,使剩余元素仍满足最大堆的性质。
2. 查找算法(1)顺序查找:从序列的第一个元素开始,依次比较,直到找到目标元素或遍历完整个序列。
第3章 图搜索与问题求解
第 3 章 图搜索与问题求解
第 3 章 图搜索与问题求解
3.1.4 启发式搜索 1. 问题的提出
2. 启发性信息 按其用途划分, 启发性信息可分为以下三类: (1) 用于扩展节点的选择, 即用于决定应先扩展哪一个节 点, 以免盲目扩展。 (2) 用于生成节点的选择,即用于决定应生成哪些后续节点, 以免盲目地生成过多无用节点。 (3) 用于删除节点的选择,即用于决定应删除哪些无用节点, 以免造成进一步的时空浪费。
第 3 章 图搜索与问题求解
代价树的搜索。所谓代价,可以是两点之间的距离、交 通费用或所需时间等等。通常用g(x)表示从初始节点So到 节点x的代价, 用c(xi,xj)表示父节点xi到子节点xj的代价,即边 (xi,xj)的代价。从而有
g(xj)=g(xi)+c(xi, xj)
而 g(So)=0
第 3 章 图搜索与问题求解 2.深度优先搜索
第 3 章 图搜索与问题求解
深度优先搜索算法: (1) 把初始节点So放入OPEN表中。 (2) 若OPEN表为空, 则搜索失败, 退出。 (3) 取OPEN表中前面第一个节点N放入CLOSED表中,并 冠以顺序编号n。 (4) 若目标节点Sg=N, 则搜索成功,结束。 (5) 若N不可扩展, 则转步(2)。 (6) 扩展N, 将其所有子节点配上指向N的返回指针依次放 入OPEN表的首部, 转步(2)。
第 3 章 图搜索与问题求解
3. 最近择优法(瞎子爬山法) 把局部择优法算法中的h(x)换成g(x)就可得最近择优 法的算法。 例:用代价树搜索求解例3-6中给出的问题。 用分支界限法得到的路径为
人工智能实验报告-图搜索策略

人工智能第一次实验报告图搜索策略班级:姓名:学号:一、实验目的1. 加深对各种图搜索策略概念的理解;2. 进一步了解启发式搜索、α-β剪枝等概念;3. 比较并分析图搜索策略的实质,通过实验理解启发式搜索的意义。
二、实验要求以九宫问题/八数码问题为例,以某种搜索策略编程演示其搜索过程,最好能采用全局择优搜索,其中的启发式函数自己设计;三、实验算法1.有解和无解如何判定?答:计算两种状态的逆序值,若两者奇偶性相同则可达,不然两个状态不可达。
下面是判断的调用函数:int panduan(struct point x,struct point y)//判断是否有解{int i,j,no=0,a[9],b[9],temp1,temp2,num1=0,num2=0;for(i=0;i<3;i++)for(j=0;j<3;j++){a[no]=x.path[i][j];b[no]=y.path[i][j];no++;}for(i=0;i<9;i++){temp1=0;temp2=0;for(j=i+1;j<9;j++){if(a[j]<a[i]) temp1++;if(b[j]<a[i]) temp2++;}num1+=temp1;num2+=temp2;}if(num1%2==num1%2)return 1;else return 0;}2.启发式函数如何设定?答:比较当前状态和目标状态不同位的个数,数值越小的越接近,因此优先扩展,当为0是表示打到目标:int decide(struct point *x) //h函数&判断函数{int i,j;int no=0; //no是数字不同的个数for(i=0;i<3;i++)for(j=0;j<3;j++) //循环比较if(x->path[i][j]!=end.path[i][j])no++;return no;}3.open表和close表如何实现?答:以结构体存储open表和close表,struct point{int step;//step用于存储相异的元素int path[3][3];struct point *next;}start,end;struct point *open[362880];struct point *closed[362880];4.关键的函数有哪些?①.该函数实现空格的上移:struct point up(struct point *b,int x,int y){point newone=*b;char a;if(x>=0&&x<=2&&y>=0&&y<=2){a=newone.path[x][y];newone.path[x][y]=newone.path[x-1][y];newone.path[x-1][y]=a;}return newone;}②.该函数用于将open表中数据排序:void paixu(){int i,a=optail;struct point *x;for(i=optail;i<ophead;i++)if(open[optail]->step<open[i]->step)a=i;for(i=optail;i<a;i++){x=open[i+1];open[i+1]=open[i];open[i]=x;}}③.Main函数中部分代码,用于实现九宫格的移动:if(num!=0){for(i=0;i<3;i++) //找空格for(j=0;j<3;j++){if(closed[cl]->path[i][j]==0){x=i;y=j;}}point *up=(point *)malloc(sizeof(struct point));//向上 *up=*closed[cl];if(x>0){up->path[x][y]=up->path[x-1][y];up->path[x-1][y]=0;}if(testhash(up)){up->step=decide(up);up->next=closed[cl];open[optail]=up;paixu();optail--;}else free(up);point *down=(point *)malloc(sizeof(struct point));//向下 *down=*closed[cl];if(x<2){down->path[x][y]=down->path[x+1][y];down->path[x+1][y]=0;}if(testhash(down)){down->step=decide(down);down->next=closed[cl];open[optail]=down;paixu();optail--;}else free(down);point *left=(point *)malloc(sizeof(struct point));//向左 *left=*closed[cl];if(y>0){left->path[x][y]=left->path[x][y-1];left->path[x][y-1]=0;}if(testhash(left)){left->step=decide(left);left->next=closed[cl];open[optail]=left;paixu();optail--;}else free(left);point *right=(point *)malloc(sizeof(struct point));//向右 *right=*closed[cl];if(y<2){right->path[x][y]=right->path[x][y+1];right->path[x][y+1]=0;}if(testhash(right)){right->step=decide(right);right->next=closed[cl];open[optail]=right;paixu();optail--;}else free(right);}cl++;}四、实验结果1. 要求有实验运行结果截图,以及必要的说明;输入数据:运行结果:2. 对所采用的策略进行性能分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验报告|
|
实验名称图搜索问题求解
课程名称人工智能
|
|
验证性、综合性实验报告应含的主要内容:
一、实验目的及要求
二、所用仪器、设备
三、实验原理
四、实验方法与步骤
五、实验结果与数据处理
六、讨论与结论(对实验现象、实验故障及处理方法、实验中存在的问题等进行分析和讨论,对实验的进一步想法或改进意见)
七、所附实验输出的结果或数据
设计性实验报告应含的主要内容:
一、设计要求
二、选择的方案
三、所用仪器、设备
四、实验方法与步骤
五、实验结果与数据处理
六、结论(依据“设计要求”)
七、所附实验输出的结果或数据
* 封面左侧印痕处装订。