简易-机器人制作
幼儿园童趣机械时光:简易机器人手工制作教案

文章标题:幼儿园童趣机械时光:简易机器人手工制作教案在幼儿园教育中,手工制作是一项十分重要的活动,可以培养幼儿的动手能力、创造力和想象力。
而机械制作则可以锻炼幼儿的逻辑思维和动手能力。
将手工制作和机械制作相结合,设计一个简易的机器人手工制作教案,不仅可以让幼儿在实践中学到知识,还能增加他们的乐趣和兴趣。
下面,我将介绍一个简易机器人手工制作的教案,希望能为幼儿园老师们带来一些启发和帮助。
一、教具和材料准备1. 彩色幼儿手工纸2. 剪刀3. 胶水4. 彩色毛线5. 眼睛装饰6. 活动制作教具包二、教学步骤第一步:制作机器人身体1. 将幼儿手工纸对折剪成半圆形的身体。
2. 使用胶水将两个半圆形的身体粘贴在一起。
3. 在机器人身体上粘贴眼睛装饰。
第二步:制作机器人手臂1. 将幼儿手工纸对折剪成长方形的手臂。
2. 将长方形的手臂卷成圆筒状,固定在机器人身体两侧。
3. 用毛线做成手臂上的关节,增加机器人的活动性。
第三步:装配机器人零件1. 利用活动制作教具包提供的工具,将机器人身体和手臂连接。
2. 调整机器人的手臂和身体,使之成为一个活动灵活的机器人模型。
三、教学目标通过制作简易机器人,幼儿能够在实践中体会机械的组装过程,培养他们的动手能力和逻辑思维。
通过创造机器人形象,幼儿能够发挥自己的想象力和创造力,增强乐趣和兴趣。
四、教学反思通过这个简易机器人手工制作教案,幼儿不仅可以在实践中学到机器人的组装原理和过程,还能够培养自己的动手能力和想象力。
通过制作机器人,幼儿可以在实践中感受到创造的乐趣,增强他们对机械制作的兴趣。
设计机械制作教案,不仅能够培养幼儿的动手能力和逻辑思维,还能够增加他们的乐趣和兴趣。
总结:通过幼儿园的简易机器人手工制作教案,可以激发幼儿的创造力和动手能力,培养他们对机械制作的兴趣。
在实践中,幼儿可以体验到机械的组装过程,增加对机械的理解和兴趣。
简易机器人手工制作教案也可以将手工制作和机械制作相结合,为幼儿园的教育活动增添一份乐趣和趣味。
《简易机器人制作》课件

本课程将教你如何制作一个简易机器人,学习电路组装、机器人程序编写和 机械部件设计等技能。
概述
电路组装
学会设计和组装机器人所需 的电路,掌握电子元件的连 接和布线。
机器人程序编写
学习编写机器人的程序,让 机器人具备自主操作和执行 任务的能力。
机械部件设计
了解机械部件的设计原理, 如机器人的动力系统和运动 机构。
所需材料
Arduino板
直流电机
舵机
蓝牙模块
步骤
1
硬件搭建
设计电路图,进行电路组装和机械部件的设计。
2
软件编写
搭建IDE环境,编写程Βιβλιοθήκη 实现蓝牙通信和红外遥控。3
调试
对电路和程序进行调试,确保机器人正常运行。
结论
通过本课程,您将掌握制作简易机器人的基本知识和技能,成为一个机器人制作的高手。
少儿机器人NXT简易机器人制作第三章
第三章简易机器人的机械控制本章主题(1)知道一般机械的组成,了解常见的机械传动的方式。
(2)了解常见齿轮传动的特点、形式和应用,会计算简单的齿轮传动比。
(3)能按照装配图样安装简单的齿轮装置,并进行调试。
(4)了解常见的连杆传动机构的结构及其应用,能设计和制作简单的连杆装置。
(5)能设计一个简单的电动机械,并进行安装和调试。
(6)能设计和制作一个由传感器、单片机、继电器、电动机和传动机械等组成的简易机器人或简单的自动控制系统,并能通过试验完成2~3个规定的动作。
第一节简易机器人的机械传动知识背景:知道一般机械的组成,了解常见的机械传动的方式。
机械组成:机械一般由动力部分、传动部分、执行部分和机体组成。
常见的机械传动装置:平面连杆传动凸轮传动链传动带传动齿轮传动蜗杆传动第二节简易机器人的齿轮传动知识背景:(1)了解常见齿轮传动的特点、形式和应用,会计算简单的齿轮传动比。
(2)能按照装配图样安装简单的齿轮装置,并进行调试。
蜗杆传动具有传动比大、传动平稳、能自锁等特点。
1.圆柱齿轮传动:用于成对齿轮,轴平行。
用手动或由电动机带动的主动轮的转向和与之啮合着的从动轮的转向是相反的。
为使两齿轮同向旋转,可在两齿轮中间增加惰齿轮。
2.圆锥齿轮传动:适用于成对齿轮,可以将两轴的旋转方向改变90 度。
3.蜗杆传动:通常以蜗杆为原动件作减速传动。
当其反行程不自锁时,也可以用蜗轮为原动件作增速运动。
可以将两轴的旋转方向改变90 度,也可以在蜗杆上获得直线运动。
4.齿条传动:齿轮齿条可用以将旋转运动变为直线运动。
活动项目一割草机活动目标:了解常用齿轮传动的相关知识内容。
要求:设计一台手动割草机。
用不同大小的齿轮组合传动系统。
由开关来控制割草机工作与否。
活动步骤第一步:参考搭建手册,搭建一辆首先底盘是一个小车的样子,前面还要有导轮,以方便转弯,后面有手柄可以推,接近手柄高处有开关,控制割草机的前进和割草的动作。
由两个马达加一个光电传感器的简易机器人小车。
幼儿园科技教案:制作简易机器人

幼儿园科技教案:制作简易机器人【文章】幼儿园科技教案:制作简易机器人科技与未来的发展息息相关,为了让孩子们从小就了解科技的奥秘,培养创造力和解决问题的能力,幼儿园里的科技教育变得愈发重要。
制作简易机器人作为一种有趣而实用的教学方式,可以帮助幼儿了解机器工作原理,培养他们的观察力、想象力和动手能力。
一、引言在现代科技的时代背景下,让幼儿园的孩子们接触并学习科技知识,对于他们日后的成长将具有深远的影响。
本文将介绍一种简易机器人制作的教案,帮助幼儿园老师和家长们为孩子们打开科技的大门。
二、制作材料准备为了制作简易机器人,我们需要准备以下材料:1. 塑料杯或纸杯2. 电池3. 小电动机4. 铅笔、橡皮筋和胶带5. 纸板或其他废旧材料6. 剪刀7. 彩色纸和彩笔(可选)三、制作步骤1. 将电池和电动机连接起来。
将电机的一端连接到电池的正极,另一端连接到电池的负极。
可以使用铅笔将电机固定在电池上。
2. 在塑料杯或纸杯上打个洞,将电动机的轴伸入杯中。
确保电动机可以自由旋转。
3. 使用纸板或者其他废旧材料制作机器人的身体和头部。
可以按照孩子们的想象力来创造各种形状和造型。
4. 将电池和电动机放在机器人身体内,使用胶带固定。
5. 尝试启动机器人,注意观察电动机的运转。
如果机器人无法启动,检查连接是否正确,并确保电池有足够的电量。
四、实施教学过程1. 引入科技概念:通过简单的动画或图片,向孩子们介绍机器人的概念,并和他们一起探讨机器人在我们生活中的应用。
2. 制作过程指导:介绍制作简易机器人的步骤,帮助孩子们了解每个材料的作用。
鼓励他们动手操作,提出问题并找到解决方法。
3. 制作实践:根据教师的指导,孩子们一起制作自己的简易机器人。
鼓励他们发挥创造力,在机器人的造型和装饰上进行个性化设计。
4. 机器人展示和讨论:孩子们展示他们制作的机器人,并讨论机器人的不同部件和功能。
教师可以引导他们思考机器人的用途和可能的改进。
简易机器人制作
简易机器人制作
什么是机器人?机器人是一种新兴的技术,由电脑和其他机器组成,可以完成复杂的任务,如清扫地板、作为家庭助手或控制核电站等。
然而,这样的机器往往会昂贵,不是每个人都能负担购买。
有一种可能性可以让每个人都有机会使用机器人,它就是简易机器人制作。
简易机器人是一种便宜又有效的方式来制作机器人。
它可以使用可用的物料,如塑料块、电子器件和配件,来制作非常简单的机器人。
此外,还可以使用软件,如Scratch或Arduino,来控制机器人。
首先,我们需要准备好所需的物料和器件,根据机器人的功能来选择。
例如,如果要制作一个简单的清扫机器人,我们可以使用一个DC电机、一个滑轮组、两个卷筒组、几块电路板,以及一些电阻和
电容舵机。
其次,我们需要连接所有的组件,它们可以通过电脑来操作,我们也可以使用线来连接它们。
然后,我们可以使用控制软件来控制机器人,如Scratch或Arduino,以完成我们所需的任务。
最后,我们可以编写代码来让机器人完成指定的任务,例如,按下按钮就可以让机器人向前移动,按另一个按钮就可以让机器人向后移动。
通过这种方式,我们可以让机器人像自己操作一样灵活。
总而言之,简易机器人制作是一种非常有效的方式,使每个人都有机会使用机器人。
它可以让我们制作出不同功能的机器人,而且它便宜又容易操作。
如果你有兴趣,不妨试试制作简易机器人,体会一下它的乐趣。
机器人制作教程

两年前,爸爸给我买了套机器人组合套件,希望我在进入小学高年级之前掌握基本的机器人知识。
去年暑假爸爸辅导我阅读《简易机器人制作(zhìzuò)》(江苏教育)一书,开始学习认识机器人,掌握初级的计算机控制和简单的机械知识。
这个寒假我利用所掌握的知识,在爸爸指导下,开始实际制作一个简单的完整模型——智能机器人小车。
一、小车功能(gōngnéng)介绍智能机器人小车可独立(dúlì)完成4个功能:1、小车(xiǎochē)碰壁拐弯——小车在行进过程中碰到障碍物倒退拐弯并继续前行;2、小车悬崖回头——小车在浅色水平桌面行进(xíngjìn),探测到行进方向是桌子边沿时停步并转弯回头;3、小车边走边唱——小车在行进过程中播放音乐;4、小车走8字——小车按照8字的形状行走;二、设计思路最初爸爸找到一个类似范例,但由于结构件不同,而且没有源程序,我们参考了这个范例的结构和功能,经过独立思考,多次实验调测,完成这个小车的制作。
1、确定任务依照不同程序,能够分别使小车完成碰壁拐弯、边走边唱、悬崖回头和走8字。
2、确定总方案根据任务确定智能小车所需完成的动作,小车需要具备探测障碍物、探测桌面边沿(biānyán)、以及相应需要完成的前进、后退、拐弯、唱歌这些动作。
3、结构设计结构设计成有两个电机分别控制两个后轮,前轮使用一个万向轮,另外需要一个接触传感器和一个双光反射传感器。
结构上需要将接触传感器触点放在小车最前端,双光反射传感器设在接触传感器稍微靠后的位置,面向地面,距地面8-10mm。
结构设计中的难点是万向轮很容易卡住,连接线不够(bùgòu)长影响控制板安装位置。
4、控制电路设计(shèjì)控制电路要设计成让传感器(接触传感器、光反射传感器)判断有没有信号,然后(ránhòu)确定两个电机正转或反转,实现小车前进、后退和拐弯这些动作。
简易机器人制作方法
简易机器人制作方法
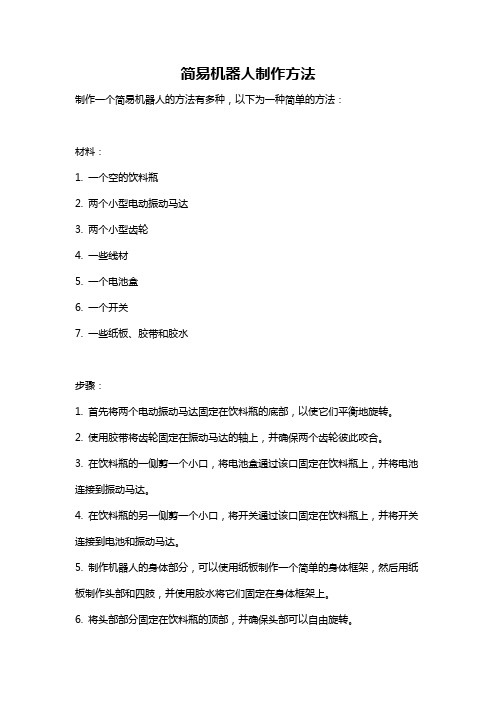
制作一个简易机器人的方法有多种,以下为一种简单的方法:
材料:
1. 一个空的饮料瓶
2. 两个小型电动振动马达
3. 两个小型齿轮
4. 一些线材
5. 一个电池盒
6. 一个开关
7. 一些纸板、胶带和胶水
步骤:
1. 首先将两个电动振动马达固定在饮料瓶的底部,以使它们平衡地旋转。
2. 使用胶带将齿轮固定在振动马达的轴上,并确保两个齿轮彼此咬合。
3. 在饮料瓶的一侧剪一个小口,将电池盒通过该口固定在饮料瓶上,并将电池连接到振动马达。
4. 在饮料瓶的另一侧剪一个小口,将开关通过该口固定在饮料瓶上,并将开关连接到电池和振动马达。
5. 制作机器人的身体部分,可以使用纸板制作一个简单的身体框架,然后用纸板制作头部和四肢,并使用胶水将它们固定在身体框架上。
6. 将头部部分固定在饮料瓶的顶部,并确保头部可以自由旋转。
7. 使用胶水将身体框架固定在饮料瓶的底部,以使机器人稳定地站立。
8. 根据需要,您可以为机器人设计和添加其他功能,例如眼睛、嘴巴等。
请注意,这只是一个简易机器人的基本制作方法,您可以根据自己的想法和兴趣进一步改进和定制机器人的功能和外观。
气球机器人的制作方法

气球机器人的制作方法
材料:
-颜色各异的气球
-小型电动机
-电池盒或电池包
-开关和导线
-木棍或金属线
-热熔胶
-剪刀
步骤:
1.准备材料:首先收集所需的材料,并确保你拥有所有必要的工具。
2.制作机器人躯干:使用木棍或金属线将两个球形的气球绑在一起,这将构成机器人的躯干。
确保气球的大小和颜色各异,以增加机器人的可视效果。
3.安装电机和开关:将电池盒或电池包固定在气球躯干上,并使用热熔胶粘合。
接下来,将电机安装在躯干的一端,并用热熔胶固定。
连接电机到电池盒或电池包,并确保开关与电路连接。
4.制作机器人的附件:使用剪刀将剩余的气球修剪成所需的形状,如机器人的头部、手臂和腿部。
使用热熔胶将这些附件固定在机器人的躯干上。
5.测试机器人:连接电源,打开开关,观察机器人是否运作。
如果气球躯干开始移动,那么你已经成功制作了一个简单的气球机器人!
尽管这个制作方法非常简单,但它可以为孩子们带来很多乐趣,同时也能引发他们对机器人技术的兴趣。
通过创新和不同的设计选择,你可以将这个制作方法发展得更加复杂和有趣。
另外,还有许多其他方法可以制作气球机器人。
你可以尝试使用不同的材料和技术,例如利用3D打印机打印机器人的零件,或者使用Arduino和传感器创建一个更智能的气球机器人。
无论是哪种方法,制作气球机器人都是一个富有创意和启发性的项目,适合人们培养动手能力和STEM教育。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(Single-Chip Micro-
CPU
13
3
20 90
64
2000
226
14
4
15
5
AT89C2051
16
1(RST) 2(P3.0) I/O 3(P3.1) I/O 4(XTAL2) 5(XTAL1) 6(P3.2) I/O 7(P3.3) I/O 8(P3.4) I/O 9(P3.5) I/O 10(GND)
体系结构 控制系统
单片机最小系统
分层递阶系统、分布式系统
单片机(8位)嵌入式、 专用控制板或计算机(32位)、专
驱动芯片、软件开发资源 用电机驱动单元、软件开发环境复
丰富、单任务简单编程 杂和昂贵、多任务实时操作系统
机械结构
拼装、模型
额定负载下满足刚度和强度
传感器
简单、廉价
高质量、高水平、高价格
环境
54
5
H PWM
55
56
PWM)
57
58
59
3
1 2 3 4
60
•1 • • •2 •
• •3 • •4
•
• •5 •6
23
61
RL A
A
SJMP LOOP
LOOP
DELAY: MOV R7,#80H
L1: MOV R6,#0FFH
L2: NOP
NOP
NOP
NOP
DJNZ R6,L2
DJNZ R7,L1
RET
END
; A P1
20
LabView
21
7
3
22
23
R=V×T/2
37
38
17cm/ms 10
39
40
4.1
1 2 3 4 5 6 7
A/D
41
4.2
42
43
4.2.2
44
3
“ ”“
”“ ”
8
4
123 4
9
1 2 3 4
10
1
1 2 3 4 5 6 7
11
1
• 1. • 2. • 3. • 4. • 5. •6
1 2
3 4
12
2
Microcomputer) Controller
•
C
•
ABC AB 90
45
46
47
3
1 2
A/D
48
49
50
51
4
52
可控硅(晶闸管)
1 4
2 3
53
P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0 P3.7
17
18
6
CPU
C
51 111
33
7
19
ORG 0000H
START MOV A #11111110B
LOOP MOV P1 A
ACALL DELAY
62
1 2 3 4 5 1 2 3
63
1
2 3
1 2 3
64
z1 z2
w1 w2 i12=w1/w2=z2/z1 1
65
1 2 3
66
/
67
68
3
1 2 3 4
74
75
1 2
76
室内、结构环境
室外、非结构环境
材料
单一(ABS塑料)
多种高强度、轻质材料
重量/尺度
小
大
“
”
6
2、机器人的定义
• ——
——
——
中国——机器人是一种自动化的机器,它具备一些 与人或生物相似的智能,如感知能力、规划能力、动作 能力和协同能力,是一种高度灵活的自动化机器。
7
31
32
33
1K
CCD CMOS
(
1 100M
34
2.1
930nm 20~50mA
0.76~1.5um( 1.0~1.3V
35
10K K 1K
0.2~0.4V
36
24
25
26
2
1 2 3 4 5
27
1
1.
,
2. 3.
4.
28
29
2
30
CCD
20(VCC) P3.0 19(P1.7) I/O P3.1 18(P1.6) I/O
2 17(P1.5) I/O 1 16(P1.4) I/O P3.2 15(P1.3) I/O P3.3 14(P1.2) I/O P3.4 13(P1.1) I/O P3.5 12(P1.0) I/O
11(P3.7) I/O
•
z1=10,z2=20,z3=80.z3‘
10,z4=40,z4’10,z5=30
i15
• i15=(z2/z1)(z3/z2)(z4/z3’)(z5/z4’)=-96
69
V
70
1 2 3 4
71
1 2 3 1 2 3
72
简易机器人制作
1
1 2 3 4
2
1
• 1954
• 1958 •
10
G.C.Devod 100
3
4
5
对“简易”的理解
比较项目
简易机器人
“
”
在役机器人
应用场合
教具、玩具
各类产业领域