想转向传动比的汽车线控转向控制算法
基于理想转向传动比的汽车线控转向控制算法

第37卷 第6期吉林大学学报(工学版)Vol.37 No.62007年11月Journal o f Jilin U niv ersity (Engineering and T echnolo gy Edition)Nov.2007收稿日期:2006 12 13.基金项目:国家自然科学基金资助项目(50475009); 863 国家高技术研究发展计划项目(2006AA 119192).作者简介:郑宏宇(1980 ),男,博士研究生.研究方向:汽车动态仿真与控制.E mail:zhy _jlu@163.co m 通讯联系人:宗长富(1962 ),男,教授,博士生导师.研究方向:汽车动态仿真与控制.E mail:zong.chang fu@基于理想转向传动比的汽车线控转向控制算法郑宏宇1,宗长富1,田承伟1,朱天军1,董义亮2,袁登木2(1.吉林大学汽车动态模拟国家重点实验室,长春130022; 2.长安股份有限公司汽车工程研究院,重庆401120)摘 要:以29自由度汽车动力学模型为基础,提出了保证汽车转向增益不变的理想传动比稳态控制策略,使线控转向汽车转向特性不受车速和方向盘转角变化的影响;提出了基于状态反馈的动态校正稳定性控制算法。
仿真和驾驶模拟器实验表明,基于理想转向传动比的稳态控制策略保证了汽车转向增益不变,减轻了驾驶员的负担,适合于更多的驾驶人群;基于状态反馈的动态校正稳定性控制算法有效提高了汽车的稳定性。
关键词:车辆工程;线控转向;转向传动比;稳态控制;稳定性控制中图分类号:U 463.4 文献标识码:A 文章编号:1671 5497(2007)06 1229 07Control algorithm for steer by wire system with ideal steering ratioZheng H ong yu 1,Zo ng Chang fu 1,Tian Cheng w ei 1,Zhu T ian jun 1,Do ng Yi liang 2,Yuan Deng m u 2(1.State K ey L abor atory ofA utomobile D y namics Simulation ,J ilin Univer sity ,Changchun 130022,China;2.I nstitute of A utomotiv e Engineer ing ,Chang an A utomobile H olding L td.,Chong qing 401120,China)Abstract:Based on a 29DOF v ehicle dynamic mo del,a steady state control strategy fo r the ideal steering ratio w as intr oduced to keep the vehicle steering g ain constant and make the steering character istic o f the steer by w ire sy stem not change w ith the vehicle speed and the steering angle;A stability control alg orithm w as proposed to correct the steering angle dynam ically based on the vehicle state feedback.The results of the simulatio n and the test in a driving simulator show ed that the introduced strateg y does keep the v ehicle steering g ain constant to reduce the driver bur den,allow ing the unskilled driver to steer the vehicle.The propo sed stability contro l algo rithm based on the vehicle state feedback improves effectively the vehicle stability.Key words:vehicle eng ineering;steering by wire;steer ratio;steady state control;stability control 目前汽车转向系统仍处于机械传动阶段,由于转向的角传动比固定,汽车转向特性随着车速和侧向加速度变化呈强非线性时变特性[1]。
汽车线控技术系列9----主动转向和四轮转向控制

2-主动转向和四轮转向控制
下图为PID控制时的横摆角速度变化,PID控制使车辆实际 横摆角速度跟踪目标整车模型所输出的目标横摆角速度, 横摆角速度收敛,汽车稳定。2-主动转向和四轮转向控制
下图为PID控制时的质心侧偏角变化。PID控制使质心侧偏 角变化较小,最后收敛到0。
2-主动转向和四轮转向控制
2-主动转向和四轮转向控制
基于PID控制的前轮主动转向控制
图为基于PID控制的前轮主动转向控制算法框图。转向盘模块输出的转 向盘转角经过转向传动比算法得到目标前轮转角值,经过非线性三自由度整车模型 计算得到目标横摆角速度。进行经典的PID控制算法,由目标横摆角速度与干扰引 起的整车实际横摆角速度的偏差得到转向电机的电流,转向电机力矩驱动前轮转向模块得到 实际前轮转角,经过三自由度整车操纵稳定性模型得到实际横摆角速度,反 馈到转向电机PID控制模块处,枃成转向电机电流的闭环控制,实现对于目标横摆 角速度的跟踪控制,保障侧向干扰下的整车操纵稳定性。
2-主动转向和四轮转向控制
基于模糊PID控制的前轮主动转向控制
基于模糊PD控制的前轮主动转向控制算法与上图类似,而将转向电机P 控制模块改为转向电机模糊PID控制模块。下图所示为模糊PID算法。模控 制有两个输入量,即目标横摆角速度与实际横摆角速度的偏差及偏差的变 化率。三个输出量为比例系数kp、积分系数ki、微分系数kd。输入与输出均 采用三角型隶属度函数。模糊控制整定的PID控制参数用于经典PID,得到 转向电机电流,驱动前轮转向模块。
下图为PID控制时的整车侧倾角变化,整车侧倾较小。
2-主动转向和四轮转向控制
下图为PID控制时的车辆轨迹,车辆基本保持以期望的行驶轨迹行驶。以车 辆实际横摆角速度与目标横摆角速度的偏差的均方根值、车辆实际侧向位移 与目标侧向位移的偏差的均方根值作为车辆侧向稳定性的评价指标。側向风 力100N、500N时,车辆横摆角速度偏差的均方根值分别为0.02"/s0.12°/s, 车辆侧向位移偏差的均方根值分别为0.05m、0.25m。PID控制参数的整定是 实现控制目标的关键。以上表明,当干扰变化时,采用固定的PID控制参数 不能保证仍然具有较好的抵制侧向干扰而保持侧向稳定性的能力。经典PID 控制应与模糊控制结合,PID控制参数由模糊控制实时整定。
基于carsim的线控转向汽车理想传动比的设计研究
基于carsim的线控转向汽车理想传动比的设计研究基于carsim的线控转向汽车理想传动比的设计研究随着科技的不断发展,汽车技术不断提高,轮胎、悬挂、转向系统等等都在不断得到改进和优化。
而作为汽车动力传递和调节的关键部件,传动比一直是大家关注的热点。
那么,如何设计一款合适的理想传动比的线控转向汽车呢?本文将从设计步骤、Carsim模拟和结论展开讲述。
一、设计步骤1. 确定基本参数:车辆质量、前悬长度、后悬长度、重心高度等;2. 设计目标:使车辆转向更稳定、行驶更平稳、提高燃油经济性;3. 根据车辆的动力学特性,确定合适的理想传动比范围;4. 利用Carsim工具开展模拟,观察各种理想传动比条件下车辆行驶情况。
二、Carsim模拟1. 点击Carsim工具栏,选择“New Vehicle”来创建汽车模型;2. 设定车辆的基本参数,输入电机参数和电池低电量限制;3. 在Carsim的“Pull-Down”菜单中,选择“Models”来添加转向模型;4. 设计转向系统的几何参数、弹簧和阻尼特征;5. 选择“Workshop”来导入仿真数据;6. 进行仿真并观察结果,选择理想传动比数据点。
三、结论在Carsim模拟的过程中,我们发现了一个问题,即在理想传动比设计过小或过大时,车辆的驾驶性能会出现问题。
因此,我们调整了传动比的大小,使其处于合适的范围内。
经过反复尝试和仿真,我们得到了一个合适的信任区间,并且在此区间内,汽车的性能表现会更稳定和优化。
总之,线控转向汽车理想传动比的设计研究是汽车制造行业不可忽视的部分。
Carsim模拟是一种有效的方法来帮助我们找到合适的理想传动比,这可以提高汽车的性能和安全性。
后续的研究将需要更多的实验和数据统计,以进一步推进汽车技术的创新和发展。
线控转向 算法

线控转向算法一、背景随着汽车技术的进步和自动驾驶的发展,人们对于汽车操控的要求越来越高。
传统的机械式转向系统已经不能满足人们的需求,因此,线控转向算法应运而生。
二、原理线控转向算法基于传感器和控制系统,通过感知车辆的运动状态和环境信息,实现对转向系统的精确控制。
具体来说,线控转向算法包括以下几个方面的内容:1. 传感器数据采集:线控转向系统通过安装在车辆上的传感器,如陀螺仪、加速度计等,采集车辆的运动数据,包括车辆的姿态、加速度、角速度等。
2. 数据处理与滤波:采集到的传感器数据需要经过处理和滤波,去除噪声和异常值,确保数据的准确性和可靠性。
3. 转向控制算法:线控转向算法根据传感器数据和预设的转向要求,计算出转向角度和转向速度,然后通过控制系统将计算结果传输给转向系统,实现对转向动作的精确控制。
4. 算法优化与自适应:线控转向算法需要不断进行优化和改进,以适应不同的驾驶场景和路况条件。
同时,算法还需要具备自适应能力,能够根据车辆的动态变化和驾驶者的操作习惯进行调整,以提供更好的操控性能和驾驶体验。
三、应用线控转向算法广泛应用于现代汽车中,为驾驶者提供更安全、稳定和舒适的驾驶体验。
具体应用包括以下几个方面:1. 车辆稳定性控制:线控转向算法可以通过对车辆姿态的实时监测和控制,提高车辆的稳定性。
在遇到急转弯、高速行驶或突发情况时,系统可以自动调整转向角度和转向速度,确保车辆的稳定性和安全性。
2. 自动驾驶功能:线控转向算法是实现自动驾驶的重要技术之一。
通过对传感器数据的处理和转向控制的精确计算,系统可以实现自动驾驶功能,提供更便捷和安全的驾驶体验。
3. 智能驾驶辅助:线控转向算法还可以与其他智能驾驶辅助系统结合,如自适应巡航控制、车道保持辅助等。
通过对车辆的转向动作进行精确控制,系统可以提供更舒适和便捷的驾驶辅助功能,减轻驾驶者的疲劳程度。
四、总结线控转向算法是一种基于传感器和控制系统的技术,用于控制汽车的转向动作。
汽车线控转向系统双向控制及变传动比特性研究

汽车线控转向系统双向控制及变传动比特性研究一、本文概述随着汽车技术的飞速发展,线控转向系统(Steer-by-Wire, SbW)作为现代车辆的重要组成部分,正逐渐成为汽车转向技术的新趋势。
作为一种全新的转向方式,线控转向系统取消了传统的机械连接,通过电子信号传递驾驶员的转向意图,再由执行机构实现车辆的转向操作。
这种技术革新不仅提高了汽车的操控性能,还为车辆智能化、自动驾驶等高级功能的实现提供了可能。
本文《汽车线控转向系统双向控制及变传动比特性研究》旨在深入探索线控转向系统的双向控制策略以及变传动比特性。
双向控制策略指的是系统能够同时接收并响应驾驶员的转向输入和车辆的主动转向需求,实现更为精准和灵活的转向控制。
而变传动比特性则是指系统能够根据车辆行驶状态及驾驶员意图,动态调整转向传动比,以优化车辆的操控稳定性和行驶安全性。
本文将首先介绍线控转向系统的基本原理和组成结构,为后续研究奠定理论基础。
接着,将详细分析双向控制策略的实现原理及其在线控转向系统中的应用优势。
然后,将重点探讨变传动比特性的设计与优化方法,以及如何通过变传动比技术提升线控转向系统的综合性能。
本文将通过实验验证和仿真分析,评估双向控制策略和变传动比特性对车辆操控稳定性及行驶安全性的影响,为线控转向系统的进一步发展和优化提供理论支持和实践指导。
二、线控转向系统基本原理线控转向系统(Steer-by-Wire,简称SBW)是一种新型的转向系统,它取消了传统的机械转向器与转向柱之间的物理连接,通过电子信号传递驾驶员的转向意图给车辆,实现车辆的转向控制。
SBW系统主要由转向盘总成、转向执行机构和主控制器(ECU)等组成。
转向盘总成是驾驶员与SBW系统的交互界面,其上集成了转向力矩传感器、转角传感器等,用于检测驾驶员的转向力矩和转角等参数,并将这些信息转换为电信号传递给主控制器。
主控制器根据接收到的信号,结合车辆当前的速度、加速度等状态信息,计算出目标转向角度和转向力矩,并通过转向执行机构实现车辆的转向。
线控转向系统变传动比特性及稳定性控制研究

摘要线控转向系统变传动比特性及稳定性控制研究 线控转向系统是一种新兴的汽车转向系统。
与传统的机械转向系统不同,线控转向系统中转向盘和转向器之间没有刚性的机械连接,整个转向系统的机械部分只有转向盘模块和转向执行模块,且两模块间的信息传递完全由电信号取代,每个模块配有一个电机来提供动力输入。
转向执行模块的电机负责驱动转向轮,而转向盘模块的电机负责模拟机械转向系统中,路面传递给转向盘的路感力矩。
两模块间通过中央控制器进行电信号的传输,设定控制器中的控制算法来调控两个电机,进而实现整个线控转向系统的运转。
本文使用两两对比的方式,对线控转向系统的模型搭建,传动比设计和稳定性控制进行深入研究。
并将双向控制理论应用于线控转向系统的结构设计和建模思路上,最后采用无源控制中的波变量法,设计波变量控制器来保证系统的整体稳定性。
本文的主要工作内容如下:1.模型的建立及仿真验证本文采用Simulink与CarSim联合建模的方法对车辆模型建模。
设计了两种不同的建模思路,通过实验仿真对两种建模思路的优缺点进行对比分析。
最后选取了仿真效果更佳的方法,即通过设置CarSim中转向系统参数并采用三环PID控制器对转型执行电机进行控制的建模方法。
2.变角传动比设计本文对比了两种不同的变角传动比设计方法,分析了定增益法的不足,并依此改进了设计方法。
采用恒定车速定横摆角速度增益和转向灵敏度两个指标,对变角传动比进行设计。
并对随车速变化的角传动比和随小齿轮转角变化的角传动比分别设计拟合,最后给出整体的线控转向系统变角传动比特性。
3.线控转向系统双向控制结构和力传动比特性研究采用双向控制理论对线控转向系统结构进行设计,通过阅读大量文献对不同双向控制结构的线控转向系统进行对比分析,选取了应用广泛且结构简单的力反馈-位置型I线控转向系统双向控制结构,并依此结构进行力传动比特性的设计和整体模型的完善。
4.线控转向系统稳定性控制研究采用无源理论对线控转向系统的稳定性进行研究。
汽车底盘故障综合检修项目17 汽车线控转向技术简介
在线控转向系统方向盘的力感设计中可不计系统的干摩擦,常用建立基于经验的汽 车转向系统回正力矩算法模型,通过驾驶员主观评价方法确定经验模型中的参数。这种方 法简单实用,被大多数线控转向系统采用。
在汽车向智能化、高速化发展的今天,线控转向系统作为一种提高汽车性能的重要 手段,结合具有高速性、高容错安全性及高实时性等特点的 FlexRay 总线技术
2. 线控转向系统理想传动比的确定
为了使汽车的转向特性在各种行驶工况下保持一致,从而能使驾驶员轻松地驾驶汽 车沿期望的轨迹行驶,由这一思想引出了转向系统理想传动比的概念,可以针对传统转向 系统的不足并根据驾驶员的实际期望进行方向盘转角与车辆路径行驶角之间的合理设计。 现有传动比设计方案中大致集中在随车速变化、随方向盘转角变化以及随车速和方向盘转 角同时变化这3种方案。
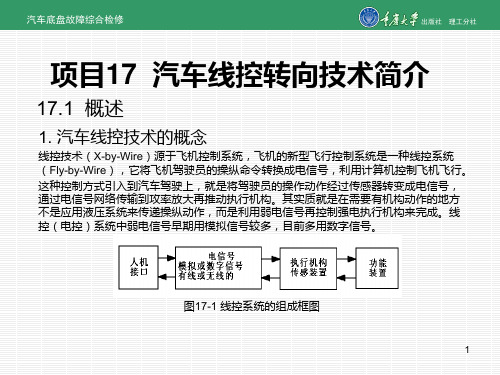
线控转向系统取消了传统的机械式转向装置,转向器与转向柱间无机械连接。整个 系统主要由转向盘位置传感器、力反馈电动机、转向执行机构、转向ECU、轮胎角度传感 器、环境传感器组成,结构如图17-3所示。
如图17-3所示,ECU控制转向电机驱动 转向轮,跟踪目标前轮转角,实现主动转 向;齿条位移传感器测量前轮的运动状态, 以进行前轮转角的反馈控制,并为路感反 馈提供参考信号,将车辆运动状况反馈给 驾驶员。车况传感器包括车速传感器,另 外根据不同路感控制策略和主动转向控制 策略的需要,还可以安装横摆角速度传感 器、侧向加速度传感器等。
线控转向系统理想传动比设计

图 1 线控转向系统结构示意图 结合 SBW 系统的工作原理,对 SBW 系统进行动力学分 析,联合 Carsim 和 Simulink 建立起装备有 SBW 系统的整车 模型,如图 2 所示。
(4)
选定 Kω=0.32,结合方向盘转角对传动比设计的影响[4], 确定的理想传动比如图 3 所示。
图 2 SBW 系统整车模型
方向盘总成作为汽车与驾驶员之间的“桥梁”,一方面将 驾驶员输入的转向信号,传递给主控制器,另一方面将路感 电机产生的模拟路感传递给驾驶员。转向执行总成也有两个 功能,一是接收主控制器发出的转向指令,通过转向执行电 机完成汽车转向,二是将前轮转角以及路面信息,反馈给主 控制器。主控制器通过采集传感器信号,根据提前设定好的 控制策略做出合理决策。主控制器一方面控制转向执行总成
2 线控转向系统理想传动比设计
本文结合传统转向系统存在的不足,分析了 SBW 系统 理想传动比所应满足的设计要求,提出了分段设计的思路, 即中低速段和高速段采用不同的控制策略,来对传动比变化 规律进行设计。 2.1 中低速段传动比设计
为保证汽车在不同速度下有着一致的转向灵敏度,中低 速段采用基于稳态横摆角速度增益不变来设计理想传动比。 根据汽车二自由度模型可以得出:
Design of Ideal Transmission Ratio for Steering-by-Wire System
Yin Fanqing, Jiang Liangchao (Automobile of School, Chang’an University, Shaanxi Xi’an 710064)
图 3 理想传动比与车速和方向盘转角的关系 2.2 高速段传动比设计
由图 3 可以看出,基于稳态横摆角速度增益不变设计的 传动比最大值为 19.8,难以满足汽车高速行驶时大传动比的 要求,故汽车高速段传动比采用模糊控制策略来确定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同样假定在任何已知车速和方向盘转角下,
侧向加速度增益G。一n,/以为一常量,8,到汽车
侧向加速度的增益Gr—n,/母,这样可以得出车 辆侧向加速度增益一定确定理想转向传动比为
i。,一Gr/G衄
(4)
1.3理想转向传动比仿真确定
利用29自由度车辆动力学模型,仿真不同车 速(40、60、80、100、120 km/h)和不同前轮转角下
(1.Sf。据K8y L460rⅡ£o掣o,A“£o舢耐如D”dmifJ Sim“z口咖n,Jlf抽mi伽"f廿,m删g吐删130022,c^i似 2.Jn时i£“抛o,A“f嗍以池勘gi榭Hng,凸nn舭nA“姗枷i如H0zdiwg L耐.,o删gqing 401120,岛i船)
Abstr解t:Based on a 29DOF vehicle dynamic model,a steady-state control strategy for the ideal
steering ratio was introduced to keep the vehicle steering gain constant and make the steering
syst咖not characteristic of the steer-by_wire
change with the vehicle speed and the steeriTlg an91e;A
L、转向传动比等)、车速“和方向盘转角计算得
到;K。为转向控制增益,理想的前轮转角d。由
d南和8i共同确定;转向电机西(s)内部闭环控制
保证实际前轮转角d指令的正确执行。
2.2横摆角速度和侧向加速度反馈控制算法
为了同时改进车辆横摆角速度和侧向加速度
响应,采用横摆角速度和侧向加速度综合反馈对
j◆ 前轮转角进行控制(见图7),表达式如下
由于车速和转向盘转角是离散的,因此确定 的理想转向传动比也是离散的,为此采用最小二 乘插值法,在车速为o~160 km/h,转向盘转角为 o~180。下,确定连续的线控转向系统理想转向传 动比。当Ks=o.5和G。一12时,由图3理想转 向传动比的变化趋势可知,转向系传动比随方向 盘转角的增加而减少。为保证极限工况下有一个 合理的转向传动比,在算法中设有一个固定的边
ContrOl algorithm for steer-by—wire system with ideal steering ratio
Zheng Hon矿yul,Zong Chang—ful,Tian Cheng—we一,Zhu Tian_junl,Dong Yi lian92,Yuan Deng_mu2
界值。图4是全工况下线控转向理想传动比锌
速和转向盘转角的关系图· 1·4基于模拟器的驾驶员主观评价试验
由图4可见,当车速和转向盘转角变化时,侧 向加速度增益一定确定的理想转向传动比,其变 化幅度较大,影响驾驶的舒适性和平顺性。因此 采用保证横摆角速度增益一定的原则来设计汽车 的理想转向传动比a将此理想转向传动比替换 ADsL驾驶模拟器中的29自由度汽车动力学模
根据线控转向系统的特点,作者在29自由度 动力学模型的基础上01设计了保证汽车转向特性 不变的理想转向传动比,使线控转向汽车特性更 容易掌握,适合于更多的驾驶人群,提出了基于汽 车状态反馈的稳定性控制策略,进行了不同附着 系数路而的双移线闭环仿真,并在开发型驾驶模 拟器上进行了驾驶员主观评价和控制策略的试验 验证。
通过 据式(3)、
。融∑~蚕
丑稃牢骚删
zlI...............,.j..................‘..................‘.-----------一
ng.3 Id姐I st坤r ratio
羹
前轮转角“。)
图2稳态时的横摆角速度增益和侧向加速度增益 Fj舀2 Steady state 0f yawmte andlateral acoeIerati吼ga岫
1汽车转向增益稳态控制
在驾驶过程中,保汪汽车的转向增益不随车
速和转向盘转角变化,吏际上就是保证汽车在不 同车速和侧向加速度下转向盘转角与汽车航向角
的一一对应关系。这将会在很大程度上减少驾驶
员对车辆特性变化的补偿,即驾驶员更容易掌握
转向增益不变的汽车转向特性,降低了驾驶汽车 的难度,减轻了驾驶员负担。同时提高汽车酌行
第37卷第6期 2007年11月
吉林大学学报(工学版)
Journal of JiIin U11iversity(Engineering afld TechnoIogy Edition)
VoL 37 No.6 NO仉2007
基于理想转向传动比的汽车线控转向控制算法
郑宏宇1,宗长富1,田承伟1,朱天军1,董义亮2,袁登木2
目前汽车转向系统仍处于机械传动阶段,由 于转向的角传动比固定,汽车转向特性随着车速 和侧向加速度变化呈强非线性时变特性03。为控 制汽车沿驾驶员期望的轨道行驶,驾驶员必须时 刻调节自身的特性,以保证人一车闭环系统特性,
增加了驾驶员驾驶时的精神负担。而且在极限工 况下(如制动甩尾等),由于汽车转向特性发生急 剧变化(如从不足转向变为过度转向),驾驶员将 无法控制汽车,以致发生交通事故。线控转向系 统(steering_By-wire System,简称sBw系统)
收稿日期:2006—12—13. 基金项目:国家自然科学基金资助项目(50475009);“863,r国家高技术研究发展计划项目(2006AAll9192) 作者简介;郑宏字(1980一),男,博士研究生.研究方向:汽车动态仿真与控制.E‘ma订:zhy_jlu@163.com 通讯联系人:宗长富(1962一),男,教授,博士生导师.研究方向:汽车动态仿真与控制.
传动比确定方法。 (1)横摆角速度增益一定
比稳态条件下,dr到汽车横摆角速度r的增
益G;为:G;=r/d,,则
r—G驴,一G矗5以
(2)
假定在任何已知车速和方向盘转角下,横摆
角速度增益G,恒为一常量度增益一定确定理想转向传动比为
i,一G;/Ks
(3)
(2)侧向加速度增益一定
E-mail:zong.changfu@ascl_jlu.edu.cn
万方数据
·1230·
吉林大学学报(工学版)
第37卷
取消了转向盘和转向轮之间的机械连接,通过导 线传递控制信号,使转向盘与汽车前轮转角之间 的关系(汽车转向的角传递特性)摆脱机械系统的 限制而自由设计,不但可以改善汽车转向的力传 递特性,也可以任意设计汽车转向的角传递特性, 使转向特性设计有很大的空间o]。
—Ks。对于线拄转向系统,只要设计合理的Gs, 就可以保证Gv为常数。综上所述,定义保证回
为常数的转向传动比为理想转向传动比。即设计 一个合理的理想转向传动比is或者Gs,保证
GGs为一定值,也就是保证汽车转向增益不变。
1.2理想转向传动比确定方法 汽车转向系统增益主要是横摆角速度增益和
侧向加速度增益。下面讨论这两种增益下的理想
车辆的横摆角速度和侧向加速度的稳态响应量,
如图1所示。29自由度车辆动力学模型是吉林
雾旋 大学汽车动态模拟国家重点实验室开发的能够用 e 七 星 谢
硝 趣
靶
罂
;赡
一~;),蜊帮异唇翠
前轮转角“。’
圈l稳态时的槛攫角速度和侧向加速度
Fi舀l Steady state of yaw rate aIId Iater蚰acoel啪tioⅡ
,::淼鬻=筌慧:兰= 。 a。d。teeri毒h¨d_。h砌angIe
型”,形成有线控转向系统的虚拟样车。在驾驶 模拟器上,利用模拟器的虚拟环境,进行真实驾驶 ’员的操纵性主观评价,评价的目的是确定有何种 转向增益的汽车更容易被驾驶员所接受。设计三 种转向增益分别为Ksl、Ks2和cONsR的虚拟 样车。其中,Ksl保证K。一o.5;Ks2保证K。一 1.O;cONsR为传统转向系统传动比(16.3)。所
(1.吉林大学汽车神态模拟国家重点实验室,长春130022;2.长安股份有限公司汽车工程研究院,重庆
401120)
摘要:以29自由度汽车动力学模型为基础,提出了保证汽车转向增益不变的理想传动比稳 态拉制策略,使线控转向汽车转向特性不受车速和方向盘转角变化的影响;提出了基于状态反 馈的动态校正稳定性控制算法。仿真和驾驶模拟器.实验表明,基于理想转向传动比的稳态控 制策略保证了汽车转向增益不变,减轻了驾驶员的负担,适合于更多的驾驶人群;基于状态反 馈的动态校正稳定性控制算法有效提高了汽车的稳定性。 关键词:车辆工程;线控转向;转向传动比;稳态控制;稳定性拉制 中圈分类号:U463.4 文献标识码:A 文章编号:1671—5497(2007)06—1229一07
stability control algorithm was proposed to correct the steering an91e dynamically based on the Vehicle state feedback. The results of the simulation and the test in a driving simulator showed that the introduced strategy does keep the vehicle steering gain constant t。reduce the driVer burden,a110wing the unskilled driver to steer the vehicle.The proposed stability control algorithm based on the vehicle
S—K1Ⅱ,+K2计
(5)
式中:K,、K。为组合系数,K。+K。一1。
Fig 7 Synthetical c帅tr0J block di雒ram