TerraScan在LiDAR点云滤波中的应用研究
(黄金浪)基于TerraScan的LiDAR数据处理-Read
1. 在 TerraScan 里可以任意定义不同的点分 类 ,每个激光点都被分到惟一的一个分类里 。这些 分类是按照激光点打到的不同地物分的 ,例如地面 、 植被 、建筑物 、电线 。我们还可以定义激光点的颜
色 ,例如地面是褐色 ,植被是绿色 ,建筑物是红色 。 这就很方便我们区分判读不同的激光点 ,如图 5所 示。
图 3 飞行轨道
图 4 重叠的激光点
图 1 定义工程窗体
3. 创建区域 block TerraScan 是以 block 为单位来处理激光点数据 的 ,因此需要创建 block ,如图 2 所示 ,创建了三个 block 。 4. 载入飞行轨道 轨道载入是 LiDAR 数据处理特有的步骤 ,这些 轨道线实际上是起到控制的作用 ,能够控制航线的 重叠度和确定激光点跟影像的联系 。使用 manage trajectories 命令 ,得到如图 3 所示的轨道 。 以上步骤是激光点处理前的准备步骤 。 5. 重叠区域裁切和激光点的分类 激光扫描仪是垂直于飞行方向扫描的 ,飞行轨 道间会有一定的扫描重叠区域 ,裁切重叠区域的好
收稿日期 : 2007204212 作者简介 : 黄金浪 (19782) ,海南海口人 ,助理工程师 ,主要从事 LiDAR 数据和 3 维地理信息系统应用研究及相关工作 。
14 测 绘 通 报 2007 年 第 10 期
地面模型或者构建出不同的建造物模型 。由于 Li2 DAR 技术只是点数据 ,没有精确的边界 ,缺少场景 信息 ,因此 ,需要影像来辅助精确定位和判读地物 , TerraScan 软件就是采用融合这两种不同系统信息 的方法来得到更加完善的模型 。在 TerraScan 里是 通过 Trajectories(轨道) 来连接激光点和影像的 。当 飞机里装载两种采集设备时 ,LiDAR 数据和影像是 同时获得的 ,LiDAR 数据获得的这些轨道线可以用 作影像定向 。
机载激光雷达点云数据滤波算法的研究与应用
机载激光雷达点云数据滤波算法的研究与应用机载激光雷达点云数据滤波算法的研究与应用随着航空技术和测绘技术的不断发展,机载激光雷达成为一种重要的航空测绘工具。
机载激光雷达通过往地面发射大量激光脉冲,并接收被地面物体反射回来的激光信号,从而获取地面物体的三维坐标信息,形成点云数据。
然而,由于各种原因的干扰和误差,激光雷达采集的原始点云数据中存在大量噪声和无效点,影响了后续的数据处理和应用。
因此,研究和应用机载激光雷达点云数据滤波算法具有重要的意义。
机载激光雷达点云数据滤波算法的研究主要是对原始点云数据进行一系列的处理和分析,过滤掉噪声点和无效点,提取出地面、建筑物以及其他特定目标的点云。
滤波算法可以分为两大类:基于几何特征的滤波算法和基于统计特征的滤波算法。
基于几何特征的滤波算法主要利用了地面与非地面点的几何特征差异。
其中,最常用的算法是基于地面平面分割的方法。
该方法首先根据点云的高度信息,将点云分为地面点和非地面点两类。
然后,通过拟合地面点的平面模型,识别出地面的点云,进一步进行滤波处理。
除了地面平面分割算法,还有基于高程阈值分割、基于邻域法分割等多种基于几何特征的滤波算法。
基于统计特征的滤波算法则是通过点云内部的统计特征来实现滤波。
其中,最常用的算法是高斯滤波算法。
该算法首先通过计算点云内部点的均值和方差,确定数据的统计分布情况。
然后,根据已知的阈值对点云数据进行滤波,排除掉不符合统计分布规律的点云。
此外,还有基于中位数滤波、基于最小二乘法滤波等多种基于统计特征的滤波算法。
机载激光雷达点云数据滤波算法的应用主要体现在航空测绘领域和地质勘探领域。
在航空测绘领域,通过滤波算法可以将噪声点和无效点过滤掉,提取出地面点云数据,进一步生成高精度的数字地图和三维模型。
在地质勘探领域,点云数据滤波算法可以将地质脉冲反射的点云数据提取出来,从而实现对地下结构的探测和分析。
总之,机载激光雷达点云数据滤波算法在航空测绘和地质勘探等领域具有广泛的应用前景。
基于TerraScan软件的点云数据滤波处理研究

tn操作 的用户才能很好 地使用它。它包括 :e a a h i o Tr M t 、 r c
Te S a n' d lr Te P oo T ra u v y Te P oo  ̄a c n Te a Mo ee  ̄a h t e r S r e  ̄a h t
目前几种主要 的点云滤波方法的基础上 , 着重探讨 了基 于 T n Sa 软件 的点云数据 处理 方法, e' cn a 如误差点剔除 、 点云分
类、 模型 重建等。经 实验数 据分析取得 了良好 的滤波效果 , 能有效滤除点云噪 声, 同时很好地保持 了地形特征。
关 键 词 : 维 激 光 扫描 ; 据 处理 ; 据 分 类 ; 云 滤 波 三 数 数 点
中 图分 类 号 :2 44 P3 .
文献标识码 : A
基 于 Tr Sa 件 的点 云 数 据 滤 波处 理研 究 er cn软 a
高 志 国
( 广州 市 城 市 规 划 勘 测 设 计 研 究 院 , 东 广 州 广 摘 50 6 ) 10 0 要 : 云 滤 波 是 地 面 三 维 激 光 扫描 数 据 处理 的 重点 和 热 点 问题 , 点 也是 点 云数 据 处理 的 一 项 关键 工作 。本 文在 阐述
分类 要 求 , 成 数 据 读 取 、 类 、 理 、 模 等 相 关 工 完 分 处 建 作 。T r S a e ac n软件 还 可 以根 据 用 户 的 不 同需 要 对 数 r 据进 行 分类处 理 , 合该 软件 中 的其他数 据处 理模 块 , 结
( T r Moe 模 块 、 erP oo模 块 、 erSr t 块 如 er d l a Tr ht a Tr te 模 a e
terrascan点云分类原理(二)

terrascan点云分类原理(二)Terrascan点云分类原理引言在地球科学、地理信息系统以及遥感领域中,点云分类是一项重要的任务。
Terrascan是一种常用的开源软件,用于对点云数据进行分类。
本文将从浅入深,逐步解释Terrascan点云分类的原理。
什么是点云分类?点云是由大量的点构成的三维数据集,代表了地球表面的特定区域。
点云分类是指将这些点根据其特征或属性,分配到事先定义好的类别中。
这一过程对于地物识别、地貌分析和环境监测等应用具有重要意义。
Terrascan点云分类的基本原理Terrascan采用了基于机器学习的方法来进行点云分类。
其基本原理包括以下几个步骤:1.数据预处理:首先,Terrascan会对原始点云数据进行预处理,包括去除噪声点、滤波和点云格式转换等操作。
这些操作可以减少数据的噪声和冗余程度,提高后续分类的准确性。
2.特征提取:在预处理完成后,Terrascan会对每个点进行特征提取。
特征可以包括点的坐标、法向量、颜色等属性。
这些特征能够描述点的几何和外观特征,为分类提供重要的信息。
3.训练模型:接下来,Terrascan使用已标记好的点云数据集进行模型的训练。
在训练过程中,Terrascan会使用各种机器学习算法,如支持向量机、随机森林等,来学习点的特征与其所属类别之间的关系。
4.分类预测:一旦模型训练完成,Terrascan能够使用该模型对未标记的点云数据进行分类预测。
根据点的特征,模型能够推断出点应该属于哪个类别。
Terrascan点云分类的特色功能除了基本分类原理,Terrascan还具有以下几个特色功能:1.多类别分类:Terrascan可以将点云数据分配到多个用户定义的类别中。
这些类别可以代表不同的地物类型,如建筑物、道路、植被等。
2.可扩展性:Terrascan的设计使得它能够轻松处理大规模的点云数据集。
它能够有效地管理内存和计算资源,提高分类的效率和可扩展性。
TerraScan在LiDAR点云滤波中的应用研究

TerraScan在LiDAR点云滤波中的应用研究
史建青;史照良
【期刊名称】《淮海工学院学报(自然科学版)》
【年(卷),期】2011(020)003
【摘要】简要介绍了机载LiDAR的发展现状,从原始LiDAR点云中滤波出真实的地面点是生成DEM和其他数字产品的基础和关键.TerraScan是一种机载LiDAR 点云滤波商业软件,对其滤波算法进行了详细分析,利用山地、丘陵地和平地3种不同地形的LiDAR数据,通过设置不同参数进行滤波试验.试验结果表明,其对平坦地区和城区有较好的滤波效果,但对地形变化较大的复杂山区滤波效果不够理想,有待进一步完善.
【总页数】4页(P46-49)
【作者】史建青;史照良
【作者单位】淮海工学院测绘工程学院,江苏连云港222005;武汉大学测绘学院,湖北武汉430079;江苏省测绘局,江苏南京210013
【正文语种】中文
【中图分类】P231
【相关文献】
1.TerraScan在激光扫描中的应用研究 [J], 祝明坤;肖枫;刘锴
2.针对广西地形激光LiDAR点云滤波处理的研究及应用 [J], LIU Run-dong;FAN Cheng-cheng;LIU Qing;LI Tao-ye;MAI Chao;WEI Qiang
3.一种改进的形态学LiDAR点云滤波算法 [J], 周钦坤;岳建平;李子宽;杨恒
4.基于改进迭代粗分类的城区LiDAR点云滤波算法 [J], 李成仁
5.基于TerraScan的LiDAR数据处理 [J], 黄金浪
因版权原因,仅展示原文概要,查看原文内容请购买。
机载LiDAR点云数据滤波与分类技术研究

技术原理
机载LiDAR点云数据滤波与分类技术的基本原理是通过对点云数据进行预处理, 将地面点云数据和非地面点云数据进行区分。其中,地面点云数据包括建筑物、 树木等地物,非地面点云数据主要为噪声点。常用的分类方法包括基于统计的 方法、基于机器学习的方法和混合方法等。
实验方法
本次演示选取某城市为实验区域,采用机载LiDAR数据进行滤波与分类实验。 首先,使用点云数据处理软件(如CloudCompare)对原始点云数据进行预处 理,包括数据格式转换、坐标系转换等。然后,采用基于高斯滤波的统计方法 对点云数据进行滤波处理,去除噪声点。接着,利用基于支持向量机(SVM) 的机器学习方法进行分类实验,将地面点云数据和非地面点云数据进行分类。 最后,对分类结果进行精度评价,以评估滤波与分类技术的效果。
机载LiDAR点云数据滤波与分类技术研 究
01 引言
03 技术原理
目录
02 文献综述 04 实验方法
05 实验结果
07 结论
目录
06 实验讨论
引言
机载激光雷达(LiDAR)是一种主动遥感技术,通过发射激光束并接收反射回 来的信号,能够快速获取高精度的地表三维坐标信息。随着无人机和卫星等平 台的广泛应用,机载LiDAR点云数据滤波与分类技术在土地资源调查、城市规 划、林业勘察、灾害评估等领域斯滤波的统计方法在滤波过程中能够有效 地去除噪声点,但难以处理地形起伏较大的区域。而基于SVM的机器学习方法 在分类过程中能够考虑地形信息,对地形起伏较大的区域具有较强的处理能力, 但分类精度稍逊于基于统计的方法。综合考虑,采用基于高斯滤波的统计方法 和基于SVM的机器学习方法的混合方法能够在保证精度的同时,更好地处理复 杂地形。
谢谢观看
2、在分类阶段,可以尝试采用其他机器学习方法,如随机森林、神经网络等, 以寻找更合适的分类器。
机载LiDAR点云数据精细化滤波方法研究
机载LiDAR点云数据精细化滤波方法研究摘要:机载LiDAR是获取地表DEM的重要技术之一。
机载激光测距技术可高效、快速获取高空间分辨率的地表三维信息,广泛应用于地形测绘、城市建模等多个领域。
原始机载LiDAR点云的数据结构是离散、不规则的,包括地面点和非地面点。
高精度分离地面点与非地面点的过程即滤波处理,是制作DEM的关键技术。
现有的机载LiDAR点云数据滤波方法,主要分为:坡度滤波法、移动窗口法、数学形态学法、渐进三角网(Triangulated Ir-regular Network,TIN)滤波法及其他滤波方法。
本文针对机载LiDAR点云数据在自动化滤波过程中因建筑、植被底点剔除不完全导致DEM成果粗糙、等高线不平滑等问题,提出了一种精细化滤波方法。
先对LiDAR点云数据进行滤波处理生成参照DEM,再利用同区域的正射影像辅助判别,选取需要滤波区域点云进行局部纠正;分别选取平坦区域和山地区域进行实验,并对精度验证和等高线成果进行了对比。
实验结果表明,经过精细化滤波后的DEM和等高线成果在保证精度指标的前提下,成果质量明显提高。
关键词:机载LiDAR点云;数据精细化;滤波方法引言激光雷达数据滤波是获取高精度数字高程模型的重要手段和前提条件。
为了实现对激光雷达数据的准确滤波,在分析部分经典算法特点的基础上,提出一种机载LiDAR点云数据的精细化滤波算法。
1点云处理流程机载LiDAR获取的点云数据只有通过后续处理才能转化成产品。
数据处理流程包括航带拼接、点云分幅、点云滤波、精细化滤波、DEM和等高线生成等,如图1所示。
图1 机载LiDAR数据处理流程图1)航带拼接:大范围测区需要多条航带才能覆盖整个区域,多航带数据需要进行拼接处理,并去除重叠区域的冗余数据。
2)点云分幅:在实际数据处理中,由于点云数据量较大,受计算机内存、处理软件的限制,需要对原始数据进行分块,同时分配作业任务,提高工作效率。
3)点云滤波:将点云数据应用于DEM和等高线的生产中时,需要从点云数据中提取出地面点,滤除建筑、植被等非地面。
Terra处理LIDAR
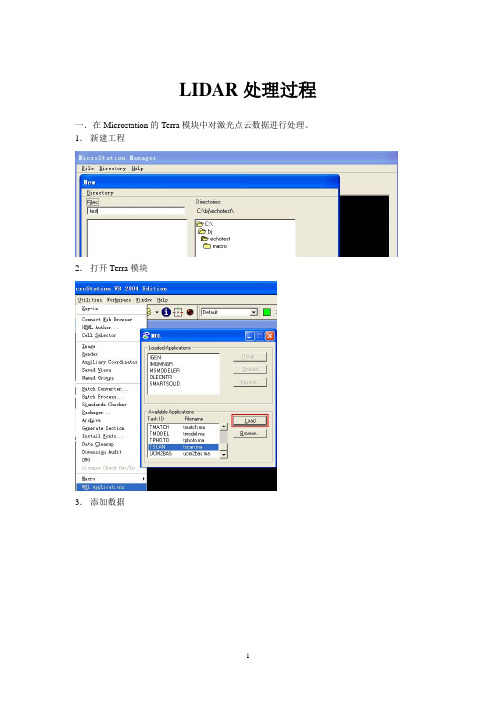
LIDAR处理过程一.在Microstation的Terra模块中对激光点云数据进行处理。
1.新建工程2.打开Terra模块3.添加数据先add再done;Increase by file表示按照文件来给航线编号,即一个*.las表示为一条航线。
数据导入之后可以以多种方式来显示:按分类、按回波、按高程、按航线、按强度、按距离等。
4.数据预处理飞行时所获取的数据往往有冗余,处理时可只选择需要的部分做处理,将这些点挑出来,步骤如下:①利用Microstation的基础工具划出需要处理的点云,如果点数较多,可分为若干块;②在Tscan的工具条中选择Define Project,新建project,将选中区域内的点导入到project中。
→→再次选择导入的*.las数据,即可将需做处理的点导入到该project中,导入后project中显示点数(上右图),目标文件夹中出现*.bin文件。
将原来的点关掉,重新加载需要做处理的点,结果如下右图。
5.自定义点集系统默认的给出了8种类型的点集,也可自定义添加点集。
6.点云滤波、去噪将点云中明显的噪声点剔除掉。
多个数据块时一般可采用批处理的方式,建立批处理的方法如下。
①将所有的点分类到default类中,②//去除航带重叠,//③//去除low point,可单个点去除,也可以小组点去除,//④去除孤立点,⑤若通过上述几步之后,仍有明显可通过绝对高程判断为噪声的点,也应去除(如云上点等)6.地面点提取(ground),各阈值可根据需要更改;7、水面点提取(Water)对于水面点的提取,需要借助于人为的判读,由于水面吸收雷达激光,当看到明显的大区域的Lidar点稀少时,可认为是水域,实际分类中,需要用到分类中的“By absoluteelevation”功能,如下操作:借助于“Identify”工具,在水域中随机读取高程值,得到大概的水域的高程范围,例如0.11~0.24,如果有影像的支持,人工绘制水域边界多边形,然后利用“Classify”-〉“Inside fence”能得到更精确地Water类别效果:/*7.利用回波信息从地面点(ground)中剔除植被①将具有多重回波特性的激光束中第一次回波分类到high vegetation②将第二次回波分类到medium vegetation8.从地面点中抽取一定密度的点用于构建地面模型,各阈值可根据需要更改;9.平滑、保存、*/输出最终的批处理列表如下图:,保存后即可随时调用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的不同而相应地变化 。 [5] 该算法的最大优点是 能 够 保 留 地 面 断 裂 特 征 ,可 以 处 理 曲 面 不 连 续 的 情 况 ,适 用于密集的城区。
由于该算法中的初始种子点是选择粗尺度网格 中 的 最 低 点 ,因 此 其 容 易 受 到 极 低 局 外 点 的 影 响 ,在 进行滤波前应尽量对局外点加以滤除。在三角网加 密 迭 代 过 程 中 ,对 于 复 杂 区 域 ,特 别 是 具 有 陡 峭 的 斜 坡 、交 通 设 施 较 多 等 地 形 特 征 的 地 方 ,由 于 阈 值 条 件 的 针 对 性 ,会 出 现 一 些 真 实 的 地 形 点 ,比 如 陡 坡 转 角 上的边缘点,始终都 不 能 满 足 添 加 到 三 角 网 的 阈 值 条 件 ,常 常 被 漏 选 。 对 于 这 种 情 况 ,该 算 法 采 用 镜 像 的方法,在一定程度 上 解 决 了 陡 坡 上 边 缘 点 可 能 被 漏选的问题 。 [5] 虽然该算法使用数学镜像方法 具 有 一定可行性,但是该 算 法 并 没 有 给 出 合 理 的 理 论 根 据,仅是经验算法,难 以 保 证 普 适 性 和 稳 健 性,并 且 对连接斜坡和较高处的地形点也不能较好地detection and ranging)作为 一种主动式新型遥 感 测 量 方 式,由 于 其 作 业 时 间 不 受 光 照 影 响 ,并 具 有 快 速 、精 确 获 取 地 面 三 维 空 间 信
息的能力[1],因此受到人们的高度重视,近年来 得 到 了快速发展,平均每年 以 25% 的 速 度 增 长 。 [2] 根 据 文献[3]介 绍,机 载 LiDAR 硬 件 发 展 已 趋 于 成 熟, 在1m2 范围内激光点数达到十几个,得到非 常 高 的 地表 分 辨 率。 然 而,由 于 机 载 LiDAR 点 云 分 布 不
尺寸/m 最大值/(°) (°)
m
70
70
5
1
70
70
10
1
按照表1中试验1设置的滤波参数滤波后的山 顶 DEM 效果图见图1中上部视 图。 按 照 表 1 中 试
第20卷 第3期
2011年9月
淮 海 工 学 院 学 报 (自 然 科 学 版 ) Journal of Huaihai Institute of Technology(Natural Science Edition)
Vol.20 No.3 Sep.2011
DOI:10.3969/j.issn.1672-6685.2011.03.012
1 TerraScan的滤波思想
2000年 Axelsson提出了 一 种 基 于 不 规 则 三 角 网(TIN)的滤波算 法[4],其 利 用 TIN 渐 进 加 密 来 滤 除非地 面 点 生 成 DEM。TerraScan 就 是 采 用 了 该 算法的基本思想。 该 滤 波 算 法 的 基 本 思 路 是:首 先 将区域内的点划分 成 单 位 间 距 较 大 的 规 则 网 格,比 如30m×30m 为一个单元,然后通过寻找每个粗尺 度网格中的最低点 作 为 初 始 的 种 子 点,用 这 些 初 始 种子点生 成 一 个 稀 疏 的 TIN,再 对 各 点 进 行 判 断; 最初,TIN 位于这 些 点 的 下 方,并 且 TIN 的 曲 率 受 到参数的限制。在 加 密 过 程 中,如 果 该 点 到 待 加 入 三角面的垂直距离以及该点到3个顶点的角度都小 于 设 定 的 阈 值 ,则 将 该 点 加 入 地 面 点 集 合 ;接 着 重 新 计算 TIN,然 后 再 对 非 地 面 点 集 合 内 的 点 进 行 判 别 。 如 此 迭 代 处 理 逐 层 加 密 ,直 到 遍 历 完 所 有 的 点 , 不再增加新 的 地 面 点 为 止,把 原 始 的 LiDAR 点 云 分为地面点和非地面点。这种算法的关键是阈值的 选取,使用不同 的 阈 值 会 产 生 不 同 的 滤 波 结 果。 因 此 ,在 运 用 这 种 方 法 时 ,阈 值 应 该 随 着 测 区 地 形 种 类
第3期
史建青等:TerraScan在 LiDAR 点云滤波中的应用研究
47
规 则 ,并 受 到 多 种 误 差 源 的 影 响 ,使 得 点 云 数 据 后 处 理软件研发滞后,现 在 几 个 投 入 商 业 运 作 的 后 处 理 软 件 大 多 由 设 备 硬 件 厂 商 提 供 ,并 且 其 算 法 保 密 ,比 如芬兰 Terrasolid公司的 Terrasolid Suite,Leica公 司的 LiDAR Analyst,美国 Merrick公司的 MARS, 美国 MathWorks 公 司 的 Matlab 等 软 件。 我 国 在 LiDAR 点云数据后处理方面的研究起步较晚,目前 一些高校和科研院所正在开展一些研究和软件开发 工作,其中 广 西 桂 能 信 息 有 限 公 司 已 经 开 发 了 Li- DAR Studio。由于地形的 复 杂 性 和 地 物 的 多 样 性, 目前无论那一种激 光 点 云 后 处 理 软 件,都 是 基 于 某 种假设或在某种特定地形条件下才具有较满意的处 理效果,普适性较差[3],功能有待于进一步完善 和 提 高。把 原 始 LiDAR 点 云 数 据 准 确、快 速 地 分 离 为 地 面 点 和 非 地 面 点 (滤 波 )是 激 光 点 云 后 处 理 软 件 的 重要 功 能 之 一,也 是 生 成 DEM (digital elevation model)、后续城 市 3D 重 建 及 生 成 其 他 数 字 产 品 的 基础和关键,因此,对 机 载 LiDAR 点 云 数 据 滤 波 方 法 和 滤 波 效 果 进 行 研 究 具 有 理 论 和 现 实 意 义。 TerraScan作 为 一 种 影 响 较 大 的 LiDAR 点 云 数 据 滤 波 软 件 ,对 其 滤 波 思 想 、处 理 速 度 和 处 理 效 果 进 行 研究有助于该领域的技术进步。本文就这个问题进 行详细的探讨。
Study on the Application of TerraScan to Filtering LiDAR Data Cloud
SHI Jian-qing1,3,SHI Zhao-liang2
(1.School of Geodesy & Geomatics Engineering,Huaihai Institute of Technology,Lianyungang 222005,China; 2.Jiangsu Provincial Bureau of Surveying & Mapping,Nanjing 210013,China; 3.School of Geodesy and Geomatics,Wuhan University,Wuhan 430079,China)
* 收稿日期:2011-03-17;修订日期:2011-05-04 基 金 项 目 :江 苏 省 测 绘 科 研 项 目 (JSCHKY201114) 作者简介:史建青(1966-),男,河北邢台人,淮海工学院测绘工程学院副教授,博士在读,主要从事空间定位理论、激光扫描理 论 与 技 术 的 研 究 ,(E-mail)jianqingsh@sina.com。
Abstract:The status quo for the development of airborne LiDAR was introduced.The filtered terrain points from airborne LiDAR point cloud is the foundation and key to make digital elevation and other digital production.We made a detailed analysis to the filtering algorithm of TerraScan, a commercial software of the airborne LiDAR point cloud filtering.We set different parameters and made filtering experiments on the basis of heterogeneous LiDAR point cloud data,including those of mountainous regions,uplands and planes.Experiment results showed that the filtering effect in urban and plane areas is better while that in mountainous regions with complex terrains is poorer,and therefore the algorithm needs further improvement. Key words:LiDAR;TerraScan;terrain;filter;effect
TerraScan在 LiDAR 点云滤波中的应用研究*
史 建 青1,3,史 照 良2
(1.淮海工学院 测绘工程学院,江苏 连云港 222005;2.江苏省测绘局,江苏 南京 210013; 3.武汉大学 测绘学院,湖北 武汉 430079)
摘 要:简要介绍了机载 LiDAR 的发 展 现 状,从 原 始 LiDAR 点 云 中 滤 波 出 真 实 的 地 面 点 是 生 成 DEM 和其他数字产品的基础和 关 键。TerraScan 是 一 种 机 载 LiDAR 点 云 滤 波 商 业 软 件,对 其 滤 波算法进行了详细分析,利用山地、丘陵地和平地3种不同地形的 LiDAR 数据,通过设置不同参数 进 行 滤 波 试 验 。 试 验 结 果 表 明 ,其 对 平 坦 地 区 和 城 区 有 较 好 的 滤 波 效 果 ,但 对 地 形 变 化 较 大 的 复 杂 山 区 滤 波 效 果 不 够 理 想 ,有 待 进 一 步 完 善 。 关 键 词 :LiDAR;TerraScan;地 形 ;滤 波 ;效 果 中 图 分 类 号 :P231 文 献 标 识 码 :A 文 章 编 号 :1672-6685(2011)03-0046-04