《控制工程基础》试卷及详细答案
控制工程基础试题及参考答案(A)

* ********* 学院20**至20**学年度第*学期---班控制工程基础试卷一、判断题(10分)1、系统的误差是以系统的输入端为基准来定义的,而系统的偏差是以系统的输出端为基准来定义的。
()2、系统的时间响应按振动性质分为自由响应和零输入响应。
( )3、最大超调量Mp即与阻尼比有关,又与无阻尼固有频率有关。
( )4、对于单位反馈系统,稳态偏差等于稳态误差。
( )5、谐振带越宽,反应速度越快。
( )一、填空题(10分)1、对控制系统的基本要求有:___________,___________,____________。
2、凡是能用____________描述的系统就是线性系统,线性系统的一个最重要特性就是它满足_____________。
3、一阶系统在理想的单位脉冲函数在作用下,其响应函数为_____________4、系统的误差是由___________和____________两部分组成的。
5、最大超调量和振荡次数反应了系统的____________________。
6、系统稳定的充要条件是__________________________________。
三、简答题(15分)1什么是时间响应?时间响应由哪两部分组成??2什么是频率特性?3什么是相位裕度?什么幅值裕度?四、计算题(计65分)1已知系统的动力学方程式如下(10分)()t y..+3()()()()t rdtt yt yt y446.=++⎰求出它的传递函数Y(s)/R(s)。
2求出图1所示系统的传递函数X o(s)/ X i(s)。
(10分)试卷纸出卷:_***_ 试卷:__ ___ 审批:_____人数3由试图所示()t f施加一个3N的阶跃力,求出质量m,阻尼系数c,弹簧进度系数k。
(15分)4已知系统的特征方程()10532234++++=sssssB=0,判断系统的稳定性。
(15分)5、已知开环频率特性10()()(1)(12)(13)G j H jj j jωωωωω=+++,分析系统的稳定性。
《控制工程基础》试卷及详细答案

一、填空题(每题1分,共15分)1、对于自动控制系统的性能要求可以概括为三个方面,即: 、 和 ,其中最基本的要求是 。
2、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数为 。
3、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有 、 等。
4、判断一个闭环线性控制系统是否稳定,可采用、、 等方法。
5、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 。
6、设系统的开环传递函数为12(1)(1)Ks T s T s ++,则其开环幅频特性为 ,相频特性为 。
7、最小相位系统是指。
二、选择题(每题2分,共20分) 1、关于奈氏判据及其辅助函数 F(s)= 1+ G(s)H(s),错误的说法是 ( ) A 、 F(s)的零点就是开环传递函数的极点B 、 F(s)的极点就是开环传递函数的极点C 、 F(s)的零点数与极点数相同D 、 F(s)的零点就是闭环传递函数的极点2、已知负反馈系统的开环传递函数为221()6100s G s s s +=++,则该系统的闭环特征方程为 ( )。
A 、261000s s ++= B 、2(6100)(21)0s s s ++++=C 、2610010s s +++=D 、与是否为单位反馈系统有关3、一阶系统的闭环极点越靠近S 平面原点,则 ( ) 。
A 、准确度越高B 、准确度越低C 、响应速度越快D 、响应速度越慢4、已知系统的开环传递函数为100(0.11)(5)s s ++,则该系统的开环增益为( )。
A 、 100B 、1000C 、20D 、不能确定5、若两个系统的根轨迹相同,则有相同的:A 、闭环零点和极点B 、开环零点C 、闭环极点D 、阶跃响应6、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是( )。
《控制工程基础》题集

《控制工程基础》题集一、选择题(每题5分,共50分)1.在控制系统中,被控对象是指:A. 控制器B. 被控制的设备或过程C. 执行器D. 传感器2.下列哪一项不是开环控制系统的特点?A. 结构简单B. 成本低C. 精度低D. 抗干扰能力强3.PID控制器中的“I”代表:A. 比例B. 积分C. 微分D. 增益4.下列哪种控制系统属于线性定常系统?A. 系统参数随时间变化的系统B. 系统输出与输入成正比的系统C. 系统输出与输入的平方成正比的系统D. 系统参数随温度变化的系统5.在阶跃响应中,上升时间是指:A. 输出从0上升到稳态值的时间B. 输出从10%上升到90%稳态值所需的时间C. 输出从5%上升到95%稳态值所需的时间D. 输出达到稳态值的时间6.下列哪种方法常用于控制系统的稳定性分析?A. 时域分析法B. 频域分析法C. 代数法D. A和B都是7.在频率响应中,相位裕度是指:A. 系统增益裕度对应的相位角B. 系统相位角为-180°时的增益裕度C. 系统开环频率响应相角曲线穿越-180°线时的增益与实际增益之差D. 系统闭环频率响应相角曲线穿越-180°线时的增益8.下列哪种控制策略常用于高精度位置控制?A. PID控制B. 前馈控制C. 反馈控制D. 最优控制9.在控制系统的设计中,鲁棒性是指:A. 系统对参数变化的敏感性B. 系统对外部干扰的抵抗能力C. 系统的稳定性D. 系统的快速性10.下列哪项不是现代控制理论的特点?A. 基于状态空间描述B. 主要研究单变量系统C. 适用于非线性系统D. 适用于时变系统二、填空题(每题5分,共50分)1.控制系统的基本组成包括控制器、和。
2.在PID控制中,比例作用主要用于提高系统的______,积分作用主要用于消除系统的______,微分作用主要用于改善系统的______。
3.线性系统的传递函数一般形式为G(s) = ______ / ______。
控制工程基础练习题题及答案(页)资料
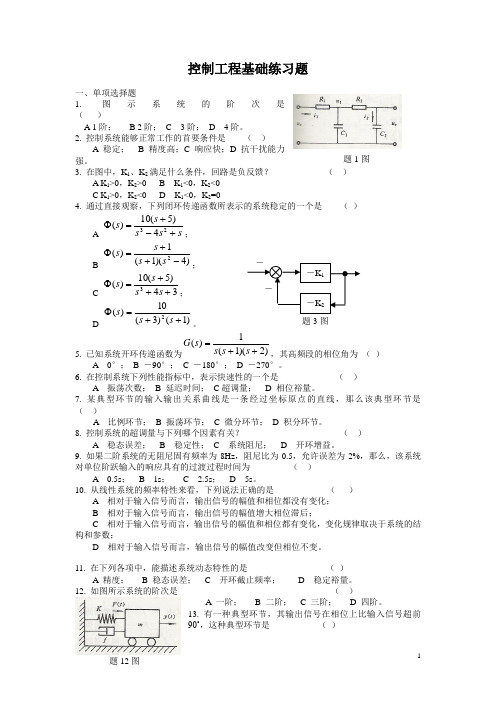
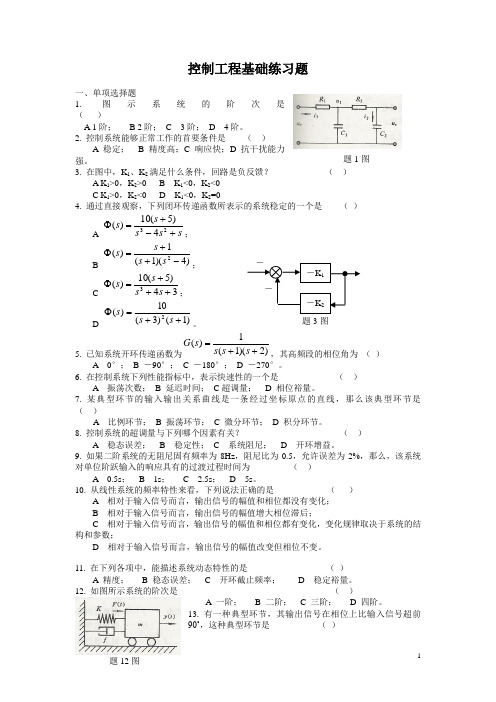
控制工程基础练习题一、单项选择题 1. 图示系统的阶次是 ( )A 1阶;B 2阶;C 3阶;D 4阶。
2. 控制系统能够正常工作的首要条件是 ( )A 稳定;B 精度高;C 响应快;D 抗干扰能力强。
3. 在图中,K 1、K 2满足什么条件,回路是负反馈? ( )A K 1>0,K 2>0B K 1<0,K 2<0C K 1>0,K 2<0D K 1<0,K 2=04. 通过直接观察,下列闭环传递函数所表示的系统稳定的一个是 ( )As s s s s +-+=Φ234)5(10)(; B )4)(1(1)(2-++=Φs s s s ; C34)5(10)(3+++=Φs s s s ; D)1()3(10)(2++=Φs s s 。
5. 已知系统开环传递函数为)2)(1(1)(++=s s s s G ,其高频段的相位角为 ( )A 0°;B -90°;C -180°;D -270°。
6. 在控制系统下列性能指标中,表示快速性的一个是 ( ) A 振荡次数; B 延迟时间; C 超调量; D 相位裕量。
7. 某典型环节的输入输出关系曲线是一条经过坐标原点的直线,那么该典型环节是 ( )A 比例环节;B 振荡环节;C 微分环节;D 积分环节。
8. 控制系统的超调量与下列哪个因素有关? ( )A 稳态误差;B 稳定性;C 系统阻尼;D 开环增益。
9. 如果二阶系统的无阻尼固有频率为8Hz ,阻尼比为0.5,允许误差为2%,那么,该系统对单位阶跃输入的响应具有的过渡过程时间为 ( )A 0.5s ;B 1s ;C 2.5s ;D 5s 。
10. 从线性系统的频率特性来看,下列说法正确的是 ( )A 相对于输入信号而言,输出信号的幅值和相位都没有变化;B 相对于输入信号而言,输出信号的幅值增大相位滞后;C 相对于输入信号而言,输出信号的幅值和相位都有变化,变化规律取决于系统的结构和参数;D 相对于输入信号而言,输出信号的幅值改变但相位不变。
控制工程基础练习题94题及答案(15页).
控制工程基础练习题一、单项选择题 1. 图示系统的阶次是 ( )A 1阶;B 2阶;C 3阶;D 4阶。
2. 控制系统能够正常工作的首要条件是 ( )A 稳定;B 精度高;C 响应快;D 抗干扰能力强。
3. 在图中,K 1、K 2满足什么条件,回路是负反馈? ( )A K 1>0,K 2>0B K 1<0,K 2<0C K 1>0,K 2<0D K 1<0,K 2=04. 通过直接观察,下列闭环传递函数所表示的系统稳定的一个是 ( )As s s s s +-+=Φ234)5(10)(; B )4)(1(1)(2-++=Φs s s s ; C34)5(10)(3+++=Φs s s s ; D)1()3(10)(2++=Φs s s 。
5. 已知系统开环传递函数为)2)(1(1)(++=s s s s G ,其高频段的相位角为 ( )A 0°;B -90°;C -180°;D -270°。
6. 在控制系统下列性能指标中,表示快速性的一个是 ( ) A 振荡次数; B 延迟时间; C 超调量; D 相位裕量。
7. 某典型环节的输入输出关系曲线是一条经过坐标原点的直线,那么该典型环节是 ( )A 比例环节;B 振荡环节;C 微分环节;D 积分环节。
8. 控制系统的超调量与下列哪个因素有关? ( )A 稳态误差;B 稳定性;C 系统阻尼;D 开环增益。
9. 如果二阶系统的无阻尼固有频率为8Hz ,阻尼比为0.5,允许误差为2%,那么,该系统对单位阶跃输入的响应具有的过渡过程时间为 ( )A 0.5s ;B 1s ;C 2.5s ;D 5s 。
10. 从线性系统的频率特性来看,下列说法正确的是 ( )A 相对于输入信号而言,输出信号的幅值和相位都没有变化;B 相对于输入信号而言,输出信号的幅值增大相位滞后;C 相对于输入信号而言,输出信号的幅值和相位都有变化,变化规律取决于系统的结构和参数;D 相对于输入信号而言,输出信号的幅值改变但相位不变。
控制工程基础期末考试题及答案

控制工程基础期末考试题及答案一、选择题1.控制系统的基本组成是( A )A. 系统、信号、传感器、控制器和执行机构B. 环境、信号、系统、传感器、执行机构C. 反馈、信号、传感器、系统、执行机构D. 信号、输出、传感器、控制器和执行机构答案:A2.在压力调节器中,控制信号循环不完全系统中,有( D )A. 闭环和开环B. 直接作用和反馈作用C. 模拟和数字信号D. 传感器和执行器答案:D3.在控制系统中,控制参数是( B )A. 控制器和执行机构B. 执行机构的推动量C. 传感器和信号D. 控制环境答案:B4.下列项目中,可以作为控制信号传输的是( B )A. 指令B. 脉冲C. 开关信号D. 压力答案:B5.在控制系统中,调整器的作用是( D )A. 输出参考信号B. 调节控制环境C. 调节输入信号D. 改变执行器的位置答案:D二、填空题6.当变量的输入是有用的外界信号时,这种控制系统叫__外环控制系统___。
答案:外环7.控制系统可以根据__反馈信号__的不同,分为闭环控制系统和开环控制系统。
答案:反馈8.控制系统的__执行机构__是控制信号实际发挥作用的部件。
答案:执行机构9.在变径机构中,活塞杆或活塞上有__凸轮__,利用凸轮来传递位置信号或脉冲信号,以便控制活塞杆的运动方向。
答案:凸轮10.控制系统本身也可以分为__硬件系统和软件系统__两部分。
答案:硬件系统和软件系统三、论述题11.介绍闭环控制系统的原理答案:闭环控制系统是指根据反馈信号自动调整控制参数,达到控制目标的控制系统。
它利用闭环环路来完成反馈控制,也是当今控制系统中应用最为广泛的控制方式。
闭环控制系统的基本元件是反馈环路、传感器、控制器和执行器,它们形成一个典型的反馈环路。
该环路的结构中,传感器将变量的实际量转换成控制信号,反馈信号与设定的参数比较,然后经过控制器处理,把得到的结果转换成推动量,这种推动量是由一个执行器来完成的,会对调节对象产生影响,使变量恢复到参考值,闭环控制系统也可以改变控制器的输出,用以达到控制目标。
《控制工程基础》练习题及答案

《控制工程基础》练习题及答案1.单选题L作为控制系统,一般()。
A.开环不振荡B.闭环不振荡C.开环一定振荡D.闭环一定振荡正确答案:A2.串联相位滞后校正通常用于()。
A.提高系统的快速性B.提高系统的稳态精度C.减少系统的阻尼D.减少系统的固有频率正确答案:B3 .下列串联校正装置的传递函数中,能在频率3C=4处提供最大相位超前角的是()。
A. (4s + l)∕(s+l)B. (s+l)∕(4s + l)C. (0.1s + l)∕(0.625s + l)D. (0.625s + l)∕(0.1s + l)正确答案:D4 .利用乃奎斯特稳定性判据判断系统的稳定性时,Z=P-N中的Z表示意义为()。
A.开环传递函数零点在S左半平面的个数B.开环传递函数零点在S右半平面的个数C.闭环传递函数零点在S右半平面的个数D.闭环特征方程的根在S右半平面的个数正确答案:D5 .某环节的传递函数为G⑸=Ts + l,它是()。
A.积分环节B.微分环节C. 一阶积分环节D. 一阶微分环节正确答案:D6.单位反馈控制系统的开环传递函数为G(s)=4∕s(s÷5),则系统在r(t)=2t输入作用下,其稳态误差为()。
A. 10/4B. 5/4C. 4/5D. 0正确答案:A7.已知系统的开环传递函数为100∕S2(0∙lS+l)(5S+4),则系统的开环增益以及型次为()。
A. 25 , ∏型B. IOO , ∏ 型C. 100 z I 型D. 25 , O 型正确答案:A8.控制论的中心思想是()。
A. 一门即与技术科学又与基础科学紧密联系的边缘科学8 .通过信息的传递、加工处理和反馈来进行控制C.抓住一切通讯和控制系统所共有的特点D,对生产力的发展、生产率的提高具有重大影响正确答案:B9 .反馈控制系统是指系统中有()。
A.反馈回路B.惯性环节C.积分环节D. PID调节器正确答案:A10.下面因素中,与系统稳态误差无关的是()。
控制工程基础考卷带答案复习资料

专业课原理概述部分一、选择题(每题1分,共5分)1. 控制系统的基本目的是?A. 提高系统精度B. 增强系统稳定性C. 改善系统性能D. 所有上述A. 稳定性B. 静态误差C. 响应时间D. 系统效率3. PID控制器中的P代表?A. 积分B. 比例C. 微分D. 偏差4. 开环控制系统与闭环控制系统的区别在于?A. 开环控制系统有反馈B. 闭环控制系统无输入C. 开环控制系统无反馈D. 闭环控制系统无输出A. 系统类型B. 开环增益C. 输入信号类型D. 控制器类型二、判断题(每题1分,共5分)1. 控制系统可以完全消除外部扰动的影响。
(×)2. 增加开环增益会提高系统的稳态精度。
(√)3. 所有控制系统都需要反馈才能正常工作。
(×)4.PID控制器适用于所有类型的控制系统。
(×)5. 控制系统的动态性能只与系统的时间常数有关。
(×)三、填空题(每题1分,共5分)1. 控制系统的基本组成部分包括控制器、执行机构、______和被控对象。
2. 控制系统的性能指标主要包括稳定性、快速性和______。
3.PID控制器由比例、积分和______三个部分组成。
4. 闭环控制系统的特点是输出信号对输入信号进行______。
5. 控制系统的数学模型通常包括______模型、传递函数模型和状态空间模型。
四、简答题(每题2分,共10分)1. 简述控制系统的基本原理。
2. 解释开环控制系统和闭环控制系统的区别。
3. 什么是PID控制器?它有什么作用?4. 简述控制系统的稳定性定义及其重要性。
5. 控制系统设计的基本步骤有哪些?五、应用题(每题2分,共10分)1. 设计一个简单的温度控制系统,并说明其工作原理。
2. 如何通过增加积分环节来减小系统的稳态误差?3. 给出一个应用PID控制器的实际案例,并解释其参数调整的意义。
4. 分析一个闭环控制系统中的反馈对系统性能的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
桂林电子科技大学试卷
2013-2014 学年第二学期
课程名称《控制工程基础》(A卷.闭卷)适用年级或专业)
考试时间120 分钟班级学号姓名
一、填空题(每题1分,共15分)
1、对自动控制系统的基本要求可以概括为三个方面,即:、快速性和。
2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为。
含有测速发电机的电动机速度控制系统,属于。
3、控制系统的称为传递函数。
一阶系统传函标准形式是,二阶系统传函标准形式是。
4、两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为()
G s,则G(s)为(用G1(s)与G2(s)表示)。
5、奈奎斯特稳定判据中,Z = P - R ,其中P是
指,Z是指,R指。
6、若某系统的单位脉冲响应为0.20.5
()105
t t
g t e e
--
=+,
则该系统的传递函数G(s)为。
7、设系统的开环传递函数为
2
(1)
(1)
K s
s Ts
τ+
+
,则其开环幅频特性为,相频特性为。
二、选择题(每题2分,共20分)
1、关于传递函数,错误的说法是 ( )
A.传递函数只适用于线性定常系统;
B.传递函数不仅取决于系统的结构参数,给定输入和扰动对
传递函数也有影响;
C.传递函数一般是为复变量s的真分式;
D.闭环传递函数的极点决定了系统的稳定性。
2、采用负反馈形式连接后,则 ( )
A、一定能使闭环系统稳定;
B、系统动态性能一定会提高;
C、一定能使干扰引起的误差逐渐减小,最后完全消除;
D 、需要调整系统的结构参数,才能改善系统性能。
3、已知系统的开环传递函数为
50
(21)(5)
s s ++,则该系统的开环
增益为 ( )。
A 、 50
B 、25
C 、10
D 、5
4、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;
B 、在积分环节外加单位负反馈;
C 、增加开环零点;
D 、引入串联超前校正装置。
5、系统特征方程为0632)(23=+++=s s s s D ,则系统 ( )
A 、稳定;
B 、单位阶跃响应曲线为单调指数上升;
C 、临界稳定;
D 、右半平面闭环极点数2=Z 。
6、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位
超前角的是 ( )。
A 、 1011s s ++
B 、1010.11s s ++
C 、210.51s s ++
D 、0.11101
s s ++
7、已知开环幅频特性如图1所示, 则图中不稳定的系统是
( )。
系统① 系统② 系统③
图1
A 、系统①
B 、系统②
C 、系统③
D 、都不稳定
8、非单位负反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),当输入信号为R(S),则从输入端定义的误差E(S)为 ( )
A 、 ()()()E S R S G S =⋅
B 、()()()()E S R S G S H S =⋅⋅
C 、()()()()E S R S G S H S =⋅-
D 、()()()()
E S R S G S H S =-
9、开环频域性能指标中的相角裕度γ对应时域性能指标( ) 。
A 、超调%σ
B 、稳态误差ss e
C 、调整时间s t
D 、峰值时间p t
10、已知下列负反馈系统的开环传递函数,应画零度根轨迹的是 ( )。
A 、*(2)(1)K s s s -+
B 、*
(1)(5K s s s -+)
C 、*2(31)K s s s +-
D 、*(1)(2)
K s s s --
三、(15分)试建立如下图所示电路的动态微分方程,并求传递函数。
四、(15分)系统结构如下图所示,求系统的超调量%
和调节
时间
s
t。
五、(20分)设控制系统如下图所示,试用劳斯判据确定使系统稳定的K 值。
六、(15分)试用结构图等效化简求下图所示系统的传递函数
()/()C s R s 。
一、填空题(每题1分,共15分)
1、稳定性,准确性
2、开环控制系统,闭环控制系统,闭环控制系统
3、输出拉氏变换与输入拉氏变换在零初始条件下的比值,
1
()1G s Ts =
+,2
22
()2n
n n
G s s s ωζωω=++或:221()21G s T s T s ζ=++)。
4、G 1(s)+G 2(s)
5、开环传函中具有正实部的极点的个数,(或:右半S 平面的开环极点个数);
闭环传函中具有正实部的极点的个数(或:右半S 平面的闭环极点个数,不稳定的根的数);
奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
6、
105
0.20.5s s s s
+
++ 7
、
,
arctan 180arctan T τωω
-- (或:
2
180arctan
1T T τωω
τω
---+) 二、选择题(每题2分,共20分)
1、B
2、D
3、C
4、A
5、C
6、B
7、B
8、D
9、A 10、A
三、(10分)
解:1、建立电路的动态微分方程
根据KCL 有 2
00i 10i )
t (u )]t (u )t (d[u )t (u )t (u R dt C R =-+-
即 )t (u )
t (du )t (u )()t (du i 2i 21021021R dt
C R R R R dt C
R R +=++
2、求传递函数
对微分方程进行拉氏变换得
)(U )(U )(U )()(U i 2i 21021021s R s Cs R R s R R s Cs R R +=++
得传递函数2
1212
21i 0)(U )(U )(R R Cs R R R Cs R R s s s G +++==
四、
解:由图可得系统的开环传函为:25
()(5)
G s s s =
+
因为该系统为单位负反馈系统,则系统的闭环传递函数为,
222
25
()255(5)
()251()(5)2555
1(5)
G s s s s G s s s s s s s +Φ====+++++++ 与二阶系统的标准形式 222
()2n
n n
s s s ωζωωΦ=++ 比较,有 22
25
5n n
ζωω=⎧⎪⎨=⎪⎩ 解得0.5
5n
ζω=⎧⎨
=⎩
所以2
2
/10.5/
10.5%16.3%e
e πζζπσ----===
3
3
1.20.55
s n
t s ζω=
=
=⨯
或
4
4
1.60.55
s n
t s ζω==
=⨯,
3.5
3.5
1.40.55
s n
t s ζω=
=
=⨯,
4.5
4.5
1.80.55
s n
t s ζω=
=
=⨯(2分)
五、
令 G 1(s)=)
3(21)3(2
+++s s K
s s =K s s 2)3(2
++= K s s 2322++
则 )()(s R s C =)(11)(111s G s s G s +=K
s s s K s s s 23211232122++⋅
+++⋅=223223+++Ks s s
控制系统的特征方程为 2232
3
+++Ks s s =0
劳斯表为
s 3
1 2K s 2
3 2
s 1
3
2
6-K s 0
2
∴ 稳定的充要条件是⎪⎩⎪⎨⎧>> 032-6K 02K ⇒⎪⎩
⎪
⎨⎧>> 310
K K ⇒31>K
即,使系统稳定的K 值为3
1>K 六、
解 :
所以:
4
32132432143211)()
(G G G G G G G G G G G G G G s R s C ++++=。