最新控制工程基础期末考试题
《控制工程基础》期末复习题及答案_81251553585744438
《控制工程基础》期末复习题一、选择题1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
5、对于以下情况应绘制0°根轨迹的是( )A 、主反馈口符号为“-” ;B 、除r K 外的其他参数变化时;C 、非单位反馈系统;D 、根轨迹方程(标准形式)为1)()(+=s H s G 。
6、开环频域性能指标中的相角裕度γ对应时域性能指标( ) 。
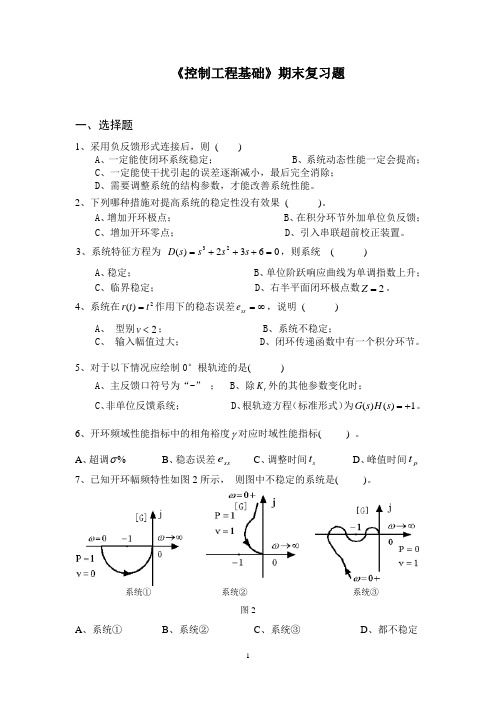
A 、超调%σB 、稳态误差ss eC 、调整时间s tD 、峰值时间p t7、已知开环幅频特性如图2所示, 则图中不稳定的系统是( )。
系统① 系统② 系统③图2A 、系统①B 、系统②C 、系统③D 、都不稳定8、若某最小相位系统的相角裕度0γ>,则下列说法正确的是 ( )。
A 、不稳定;B 、只有当幅值裕度1g k >时才稳定;C 、稳定;D 、不能判用相角裕度判断系统的稳定性。
9、若某串联校正装置的传递函数为1011001s s ++,则该校正装置属于( )。
A 、超前校正 B 、滞后校正 C 、滞后-超前校正 D 、不能判断10、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是:A 、 1011s s ++B 、1010.11s s ++C 、210.51s s ++D 、0.11101s s ++ 11、关于传递函数,错误的说法是 ( )A 传递函数只适用于线性定常系统;B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C 传递函数一般是为复变量s 的真分式;D 闭环传递函数的极点决定了系统的稳定性。
控制工程基础复习题答案(修)
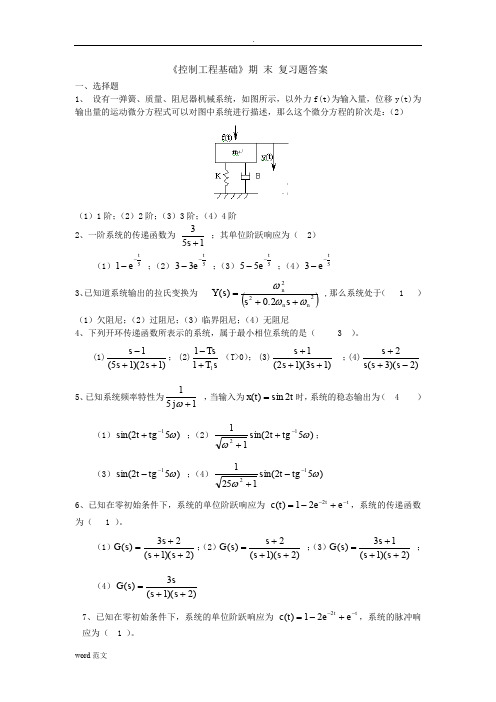
《控制工程基础》期 末 复习题答案一、选择题1、 设有一弹簧、质量、阻尼器机械系统,如图所示,以外力f(t)为输入量,位移y(t)为输出量的运动微分方程式可以对图中系统进行描述,那么这个微分方程的阶次是:(2)(1)1阶;(2)2阶;(3)3阶;(4)4阶 2、一阶系统的传递函数为153+s ;其单位阶跃响应为( 2) (1)51te-- ;(2)533t e -- ;(3)555te-- ;(4)53te--3、已知道系统输出的拉氏变换为 ()222.20)(nn ns s s Y ωωω++= ,那么系统处于( 1 ) (1)欠阻尼;(2)过阻尼;(3)临界阻尼;(4)无阻尼4、下列开环传递函数所表示的系统,属于最小相位系统的是( 3 )。
(1))12)(15(1++-s s s ; (2)s T Ts 111+- (T>0); (3))13)(12(1+++s s s;(4))2)(3(2-++s s s s 5、已知系统频率特性为151+ωj ,当输入为t t x 2sin )(=时,系统的稳态输出为( 4 )(1))52sin(1ω-+tg t ;(2))52sin(1112ωω-++tg t ;(3))52sin(1ω--tg t ;(4))52sin(125112ωω--+tg t6、已知在零初始条件下,系统的单位阶跃响应为 t te e t c --+-=221)(,系统的传递函数为( 1 )。
(1))2)(1(23)(+++=s s s s G ;(2))2)(1(2)(+++=s s s s G ;(3))2)(1(13)(+++=s s s s G ;(4))2)(1(3)(++=s s ss G7、已知在零初始条件下,系统的单位阶跃响应为 t te e t c --+-=221)(,系统的脉冲响应为( 1 )。
(1)t te e t k ---=24)( (2) t t e e t k ---=4)( (3)t te et k --+=24)( (4) t t e e t k 24)(---=8、系统结构图如题图所示。
控制工程基础期末试卷
控制工程基础期末试卷(复习专用)
一、填空题
1、、控制的基本方式有开环控制和闭环控制。
开环控制:系统的输出量对系统无控制作用,或者说系统中无反馈回路的系统,称为开环控制系统。
闭环控制:系统的输出量对系统有控制作用,或者说系统中存在反馈回路的系统,称为闭环控制系统。
2、对控制系统的性能要求稳定性、快速性、准确性。
稳定性:指系统重新恢复稳态的能力。
稳定是控制系统正常工作的先决条件。
快速性:指稳定系统响应的动态过程的时间长短。
准确性:指控制系统进入稳态后,跟踪给定信号或纠正扰动信号影响的准确度。
3、典型环节的传递函数比例环节、惯性环节、积分环节、微分环节、振荡环节、延迟环节。
4、方框图的基本连接形式:串联连接、并联连接、反馈连接。
5、任一系统的时间响应都是由瞬态响应和稳态响应两部分组成。
瞬态响应:系统受到外加作用激励后,从初始状态到最终状态的响应过程称为瞬态响应。
稳态响应:时间趋于无穷大时,系统的输出状态称为稳态响应。
瞬态响应反映了系统动态性能,而稳态响应偏离系统希望值的程度可用来衡量系统的精确程
度。
6、时域性能指标延迟时间t d、上升时间t r、峰值时间t p 、调节时间t s 、最大超调量M p、稳态误差e ss。
7、常用的典型输入信号有:单位阶跃信号、脉冲信号、单位斜坡信号、单位加速度信号、正弦信号。
《控制工程基础》题集

《控制工程基础》题集一、选择题(每题5分,共50分)1.在控制系统中,被控对象是指:A. 控制器B. 被控制的设备或过程C. 执行器D. 传感器2.下列哪一项不是开环控制系统的特点?A. 结构简单B. 成本低C. 精度低D. 抗干扰能力强3.PID控制器中的“I”代表:A. 比例B. 积分C. 微分D. 增益4.下列哪种控制系统属于线性定常系统?A. 系统参数随时间变化的系统B. 系统输出与输入成正比的系统C. 系统输出与输入的平方成正比的系统D. 系统参数随温度变化的系统5.在阶跃响应中,上升时间是指:A. 输出从0上升到稳态值的时间B. 输出从10%上升到90%稳态值所需的时间C. 输出从5%上升到95%稳态值所需的时间D. 输出达到稳态值的时间6.下列哪种方法常用于控制系统的稳定性分析?A. 时域分析法B. 频域分析法C. 代数法D. A和B都是7.在频率响应中,相位裕度是指:A. 系统增益裕度对应的相位角B. 系统相位角为-180°时的增益裕度C. 系统开环频率响应相角曲线穿越-180°线时的增益与实际增益之差D. 系统闭环频率响应相角曲线穿越-180°线时的增益8.下列哪种控制策略常用于高精度位置控制?A. PID控制B. 前馈控制C. 反馈控制D. 最优控制9.在控制系统的设计中,鲁棒性是指:A. 系统对参数变化的敏感性B. 系统对外部干扰的抵抗能力C. 系统的稳定性D. 系统的快速性10.下列哪项不是现代控制理论的特点?A. 基于状态空间描述B. 主要研究单变量系统C. 适用于非线性系统D. 适用于时变系统二、填空题(每题5分,共50分)1.控制系统的基本组成包括控制器、和。
2.在PID控制中,比例作用主要用于提高系统的______,积分作用主要用于消除系统的______,微分作用主要用于改善系统的______。
3.线性系统的传递函数一般形式为G(s) = ______ / ______。
控制工程基础期末考试复习资料

《控制工程基础》课程综合复习资料一、单选题1. 判断下面的说法是否正确:偏差()t ε不能反映系统误差的大小。
(A)正确(B)错误答案:B2. 判断下面的说法是否正确:静态速度误差系数v K 的定义是20lim .()s s G s →。
(A)正确(B)错误答案:B3.二阶振荡环节的传递函数G(s)=()。
(A)22,(01)21Ts T s Ts ξξ<<++ (B)22,(01)21T T s Ts ξξ<<++ (C)221,(01)21T s Ts ξξ<<++ (D)22,(01)21s T s Ts ξξ<<++ 答案:C4.函数5()301G jw jw =+的幅频特性()A w 为()。
(A)(B)(C)(D)259001w + 答案:D5.某一系统的误差传递函数为()1()1()i E s X s G s =+,则单位反馈系统稳态误差为()。
(A)01lim ()1()i s s X s G s →+ (B)01lim ()1()i s X s G s →+ (C)1lim ()1()i s s X s G s →∞+ (D)1lim ()1()i s X s G s →∞+ 答案:A6.某系统的传递函数为21()56s s s s φ+=++,其单位脉冲响应函数0()x t =()。
(A)23(2)1()t t e e t ---+(B)23(2)1()t t e e t --+(C)1()t(D)0答案:A7.图中系统的脉冲传递函数为()。
(A)1010()(1)()(1)()T T C z z e R z z z e --+=-+ (B)1010()(1)()(1)()T T C z z e R z z z e ---=-+ (C)210()10()(1)()T C z z R z z z e -=--(D)210()10()(1)()T C z z R z z z e --=-- 答案:C8.二阶系统的极点分别为120.5,3s s =-=-,系统增益2,则其传递函数为()。
控制工程基础期末考试题
一、填空题1.控制系统正常工作的首要条件是__稳定性_。
2.脉冲响应函数是t e t g 532)(--=,系统的传递函数为___2s −3s +5____ 。
3.响应曲线达到过调量的____最大值____所需的时间,称为峰值时间t p 。
4.对于一阶系统的阶跃响应,其主要动态性能指标是___T _____,T 越大,快速性越___差____。
5.惯性环节的奈氏图是一个什么形状______半圆弧 。
二、选择题1.热处理加热炉的炉温控制系统属于:A A.恒值控制系统 B.程序控制系统 C.随动控制系统 D.以上都不是 2.适合应用传递函数描述的系统是( C )。
A 、单输入,单输出的定常系统;B 、单输入,单输出的线性时变系统;C 、单输入,单输出的线性定常系统;D 、非线性系统。
3.脉冲响应函数是t e t g 532)(--=,系统的传递函数为: A A.)5(32+-s s B.)5(32-+s s C.)5(32+-s D. )5(32++s s4.实轴上两个开环极点之间如果存在根轨迹,那么必然存在( C ) A .闭环零点 B .开环零点 C .分离点 D .虚根5. 在高阶系统中,动态响应起主导作用的闭环极点为主导极点,与其它非主导极点相比,主导极点与虚轴的距离比起非主导极点距离虚轴的距离(实部长度) 要( A )A 、小B 、大C 、相等D 、不确定6.一阶系统的动态性能指标主要是( C )A. 调节时间B. 超调量C. 上升时间D. 峰值时间 7 . 控制系统的型别按系统开环传递函数中的( B )个数对系统进行分类。
A .惯性环节 B . 积分环节 C . 比例环节 D .微分环节 8.对于I 型系统,(A )输入信号稳态误差为零。
A 、单位阶跃B 、加速度函数 (C) 正弦函数 (D) 单位斜坡 9.在开环零、极点分布已知的情况下,可绘制(C )随系统参数变化(如放大系数)而在s 平面上移动的轨迹(根轨迹)。
控制工程基础期末考试题及答案
控制工程基础期末考试题及答案一、选择题1.控制系统的基本组成是( A )A. 系统、信号、传感器、控制器和执行机构B. 环境、信号、系统、传感器、执行机构C. 反馈、信号、传感器、系统、执行机构D. 信号、输出、传感器、控制器和执行机构答案:A2.在压力调节器中,控制信号循环不完全系统中,有( D )A. 闭环和开环B. 直接作用和反馈作用C. 模拟和数字信号D. 传感器和执行器答案:D3.在控制系统中,控制参数是( B )A. 控制器和执行机构B. 执行机构的推动量C. 传感器和信号D. 控制环境答案:B4.下列项目中,可以作为控制信号传输的是( B )A. 指令B. 脉冲C. 开关信号D. 压力答案:B5.在控制系统中,调整器的作用是( D )A. 输出参考信号B. 调节控制环境C. 调节输入信号D. 改变执行器的位置答案:D二、填空题6.当变量的输入是有用的外界信号时,这种控制系统叫__外环控制系统___。
答案:外环7.控制系统可以根据__反馈信号__的不同,分为闭环控制系统和开环控制系统。
答案:反馈8.控制系统的__执行机构__是控制信号实际发挥作用的部件。
答案:执行机构9.在变径机构中,活塞杆或活塞上有__凸轮__,利用凸轮来传递位置信号或脉冲信号,以便控制活塞杆的运动方向。
答案:凸轮10.控制系统本身也可以分为__硬件系统和软件系统__两部分。
答案:硬件系统和软件系统三、论述题11.介绍闭环控制系统的原理答案:闭环控制系统是指根据反馈信号自动调整控制参数,达到控制目标的控制系统。
它利用闭环环路来完成反馈控制,也是当今控制系统中应用最为广泛的控制方式。
闭环控制系统的基本元件是反馈环路、传感器、控制器和执行器,它们形成一个典型的反馈环路。
该环路的结构中,传感器将变量的实际量转换成控制信号,反馈信号与设定的参数比较,然后经过控制器处理,把得到的结果转换成推动量,这种推动量是由一个执行器来完成的,会对调节对象产生影响,使变量恢复到参考值,闭环控制系统也可以改变控制器的输出,用以达到控制目标。
最新《控制工程基础》习题集及答案
最新《控制⼯程基础》习题集及答案《控制⼯程基础》习题集及答案第⼀部分:单选题1.⾃动控制系统的反馈环节中必须具有[ b ] a.给定元件 b .检测元件 c .放⼤元件 d .执⾏元件2. 在直流电动机的电枢回路中,以电流为输出,电压为输⼊,两者之间的传递函数是[ a ] a .⽐例环节 b .积分环节 c .惯性环节 d .微分环节3. 如果系统不稳定,则系统 [ a ] a.不能⼯作 b .可以⼯作,但稳态误差很⼤ c .可以⼯作,但过渡过程时间很长 d .可以正常⼯作4. 在转速、电流双闭环调速系统中,速度调节器通常采⽤[ B ]调节器。
a .⽐例b .⽐例积分c .⽐例微分d .⽐例积分微分5.单位阶跃函数1(t)的拉⽒变换式L[1(t)]为[ B ]: a .S b. S1 c.21Sd. S 26. 在直流电动机的电枢回路中,以电流为输出,电压为输⼊,两者之间的传递函数是[ A ] A .⽐例环节 B .积分环节 C .惯性环节 D .微分环节7.如果系统不稳定,则系统 [ A ]A. 不能⼯作 B.可以⼯作,但稳态误差很⼤C.可以⼯作,但过渡过程时间很长 D.可以正常⼯作8. 已知串联校正⽹络(最⼩相位环节)的渐近对数幅频特性如下图所⽰。
试判断该环节的相位特性是[ A ]:A.相位超前B.相位滞后[ B ]调节器。
A.⽐例 B.⽐例积分C.⽐例微分 D.⽐例积分微分10. 已知某环节的幅相频率特性曲线如下图所⽰,试判定它是何种环A.相位超前 B. 相位滞后C. 相位滞后-超前D. 相位超前-滞后 12. 开环增益K 增加,系统的稳定性( c ):A .变好 B. 变坏 C. 不变 D. 不⼀定 13. 开环传递函数的积分环节v 增加,系统的稳定性():A .变好 B. 变坏 C. 不变 D. 不⼀定 14. 已知 f(t)=0.5t+1,其L[f(t)]=( c ): A .S+0.5S 2 B. 0.5S 2 C. S S1212D. S 2115.⾃动控制系统的反馈环节中必须具有( b ):A.给定元件 B .检测元件 C .放⼤元件 D .执⾏元件16.PD 调节器是⼀种( a )校正装置。
控制工程基础考卷带答案复习资料
专业课原理概述部分一、选择题(每题1分,共5分)1. 控制系统的基本目的是?A. 提高系统精度B. 增强系统稳定性C. 改善系统性能D. 所有上述A. 稳定性B. 静态误差C. 响应时间D. 系统效率3. PID控制器中的P代表?A. 积分B. 比例C. 微分D. 偏差4. 开环控制系统与闭环控制系统的区别在于?A. 开环控制系统有反馈B. 闭环控制系统无输入C. 开环控制系统无反馈D. 闭环控制系统无输出A. 系统类型B. 开环增益C. 输入信号类型D. 控制器类型二、判断题(每题1分,共5分)1. 控制系统可以完全消除外部扰动的影响。
(×)2. 增加开环增益会提高系统的稳态精度。
(√)3. 所有控制系统都需要反馈才能正常工作。
(×)4.PID控制器适用于所有类型的控制系统。
(×)5. 控制系统的动态性能只与系统的时间常数有关。
(×)三、填空题(每题1分,共5分)1. 控制系统的基本组成部分包括控制器、执行机构、______和被控对象。
2. 控制系统的性能指标主要包括稳定性、快速性和______。
3.PID控制器由比例、积分和______三个部分组成。
4. 闭环控制系统的特点是输出信号对输入信号进行______。
5. 控制系统的数学模型通常包括______模型、传递函数模型和状态空间模型。
四、简答题(每题2分,共10分)1. 简述控制系统的基本原理。
2. 解释开环控制系统和闭环控制系统的区别。
3. 什么是PID控制器?它有什么作用?4. 简述控制系统的稳定性定义及其重要性。
5. 控制系统设计的基本步骤有哪些?五、应用题(每题2分,共10分)1. 设计一个简单的温度控制系统,并说明其工作原理。
2. 如何通过增加积分环节来减小系统的稳态误差?3. 给出一个应用PID控制器的实际案例,并解释其参数调整的意义。
4. 分析一个闭环控制系统中的反馈对系统性能的影响。
控制工程基础期末试卷及其答案
控制工程基础课程考试试卷课程名称: 控制工程基础;试卷编号:C 卷;考试时间:120分钟;考试形式:闭卷试卷得分表题 号 一二三四五六总 分应得分 实得分一、填空( 每小题4分,共20分) 得分 评卷人 复查人1、某系统传递函数为21s,在输入t t r 3sin 2)( 作用下,输出稳态分量的幅值为 。
2、谐波输入下,系统的 响应称为频率响应。
3、已知某系统开环传递函数的零点都在左半S 平面,其开环频率特性曲线如图1.5所示,则该系统位于右半S 平面的极点数有 个。
4、控制系统的基本要求主要有: , , 。
5、Nyquist 图上以原点为圆心的单位圆对应于Bode 图上 的 线。
二、选择题( 每小题3分,共30分 )1、关于反馈的说法,正确的是( )A .反馈实质上就是信号的并联B .反馈都是人为加入的C .正反馈就是输入信号与反馈相加D .反馈就是输出以不同方式作用于系统 2、关于系统模型的说法,正确的是( )A .每个系统只有一种数据模型B .动态模型在一定条件下可简化为静态模型C .动态模型比静态模型好D .静态模型比动态模型好 3、某环节的传递函数为s 1,则该环节为( )A. 惯性环节B. 积分环节 C .微分环节 D .比例环节 4、系统的传递函数( )A .与外界无关B .反映了系统、输出、输入三者之间的关系C .完全反映了系统的动态特性 D. 与系统的初始状态有关 5、二阶欠阻尼系统的上升时间为( )A .阶跃响应曲线第一次达到稳定值的98%的时间B .阶跃响应曲线达到稳定值的时间C .阶跃响应曲线第一次达到稳定值的时间D .阶跃响应曲线达到稳定值的98%的时间 6、关于线性系统时间响应,说法正确的是( )A .时间响应就是系统输出的稳态值B .由单位阶跃响应和单位脉冲响应组成C .由强迫响应和自由响应组成D .与系统初始状态无关 7、系统的单位脉冲响应函数为te t w 2.03)(-=,则系统的传递函数为( )A .2.03)(+=S s G B. 32.0)(+=S s GC .2.06.0)(+=S s G D .36.0)(+=S s G8、以下系统中,属于最小相位系统的是( ) A .s s G 01.011)(-= B .ss G 01.011)(+=C .101.01)(-=s s G D .)1.01(1)(s s s G -=9、一个线性系统稳定与否取决于( )A .系统的结构和参数B .系统的输入C .系统的干扰D .系统的初始状态 10、一个系统稳定的充要条件是( )A .系统的全部极点都在[S]平面的右半平面内B .系统的全部极点都在[S]平面的上半平面内C .系统的全部极点都在[S]平面的左半平面内D .系统的全部极点都在[S]平面的下半平面内三、系统结构图如下图所示,求)()(s R s Y (15分) 得分 评卷人复查人四、系统在静止平衡状态下,加入输入信号t t r +=1)(,测得响应为9.09.0)(10+-=-tet t C试求系统的传递函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、填空题
1.控制系统正常工作的首要条件是__稳定性_。
2.脉冲响应函数是t e t g 532)(--=,系统的传递函数为___2
s −3
S+5____ 。
3.响应曲线达到过调量的____最大值____所需的时间,称为峰值时间t p 。
4.对于一阶系统的阶跃响应,其主要动态性能指标是___T _____,T 越大,快速性越___差____。
5.惯性环节的奈氏图是一个什么形状______半圆弧 。
二、选择题
1.热处理加热炉的炉温控制系统属于:A A.恒值控制系统 B.程序控制系统 C.随动控制系统 D.以上都不是 2.适合应用传递函数描述的系统是( C )。
A 、单输入,单输出的定常系统;
B 、单输入,单输出的线性时变系统;
C 、单输入,单输出的线性定常系统;
D 、非线性系统。
3.脉冲响应函数是t e t g 532)(--=,系统的传递函数为: A A.)5(32+-s s B.)
5(32-+s s C.)5(32+-
s D. )
5(3
2++s s
4.实轴上两个开环极点之间如果存在根轨迹,那么必然存在( C )
A .闭环零点
B .开环零点
C .分离点
D .虚根
5. 在高阶系统中,动态响应起主导作用的闭环极点为主导极点,与其它非主导极点相比,主
导极点与虚轴的距离比起非主导极点距离虚轴的距离(实部长度) 要( A )
A 、小
B 、大
C 、相等
D 、不确定 6.一阶系统的动态性能指标主要是( C )
A. 调节时间
B. 超调量
C. 上升时间
D. 峰值时间
7 . 控制系统的型别按系统开环传递函数中的( B )个数对系统进行分类。
A .惯性环节
B . 积分环节
C . 比例环节
D .微分环节 8.对于I 型系统,(A )输入信号稳态误差为零。
A 、单位阶跃
B 、加速度函数 (C) 正弦函数 (D) 单位斜坡 9.在开环零、极点分布已知的情况下,可绘制(
C )随系统参数变化(如放大系数)而在s 平面上移动的轨迹(根轨迹)。
A.开环极点
B. 开环零点
C.闭环极点
D. 闭环零点
10.开环传递函数为)
35.0()
25.0)(15.0()(+++=
s s s s k s G ,其根轨迹的起点为 C
A .0,-3
B .-1,-2
C .0,-6
D .-2,-4
11.当∞→ω时比例微分环节的相位是:A A. 90 B. 90- C. 45 D. 45-
三、简答题
1.自动控制的定义是?
再没有人直接参与的情况下,使被控对象的某些物理量准确的按照预期规律变化 2.闭环主导极点的定义?
离虚轴近,又不构成偶极子的极点和零点起作用,决定顺态响应性能。
3. 线性系统稳定的充要条件是?
系统特征方程式的根全部具有负实部 4. 频率特性的定义?
用幅值和相位来描述一个点在极坐标内随ω从0变到∞时的轨迹,来分析系统的性能的方法 四、分析计算题
1.(10分)已知系统结构如图1所示,化简结构图求传递函数
)
()
(s R s C
图1
2.控制系统如图2所示,系统单位阶跃响应的峰值时间为3s 、超调量为20%,求K ,a 值。
(ln0.2=-1.6,lg2=0.3)
图2
3.已知单位负反馈控制系统的开环传递函数为
试求其静态位置、速度和加速度误差系数,并求当输入信号为
时系统的稳
态误差。
4.(10分)负反馈控制系统的开环传递函数为
()()
12.01020)(++=
s s s G k 2
2101)(t t t r ++=
()()(1)(0.51)k
G s H s s s s =
++
试绘制系统的根轨迹草图,并求根轨迹与虚轴交点及系统稳定的k 的取值范围。