(完整版)机械原理齿轮机构
合集下载
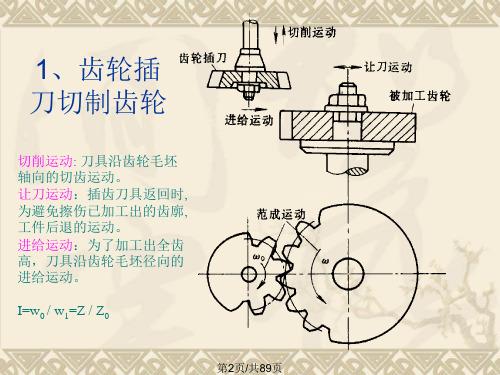
机械原理齿轮机构及其设计PPT

α
5、基圆 rb
s = e = p/2
6、齿顶高 ha
O
7、齿根高 hf
8、全齿高 h h = ha + hf
9、压力角 α
一、齿轮各部分名称
ακ
1、齿数 z
2、模数 m (非常主要旳概念) 以齿轮分度圆为计算各部分尺寸基准
齿数 z ×齿距 p = 分度圆周长 πd
分度圆直径d = z × p / π
一对齿轮作无侧隙啮合传动时,共存在四个基本原因:
两个几何原因,即一对共轭旳渐开线齿廓 给定其中任何三个原因, 两个运动原因,即两轮旳角速度 ω0 和ω 就能取得第四个原因
刀具齿廓拟定,强制刀具与轮坯以定传动比 i = ω0/ω运动
刀具旳齿廓(一种几何原因)就必然在轮坯上切削(包络)出轮 坯旳齿廓(另一种几何素)。
连续传动旳条件为:B1B2 ≥ Pb
可表达为:重叠度ε a = B1B2 / Pb≥ 1
ε a 分析:重叠度旳大小表白同步参加啮合轮齿啮合对数旳平均值
ε a = 1 时,一直只有一对轮齿啮合,确保最低连续传动; ε a < 1 时,齿轮传动部分时间不连续; ε a > 1 时,部分时间单齿啮合,部分时间双齿啮合。
pb
2
B1B2
B1P + PB2
ω2
ε = pb = πmcosα
ε=
1 (z1(tan α a1 – tanα ’) + z2(tan α a2 – tanα ’))
2π
由上式可知,重叠度 ε 与齿数 z 正有关,z 越大ε 越高;
啮合角 α’ 越大,重叠度 ε 越小。与模数m无关。
四、原则中心距 a 与实际中心距 a’
机械原理 第五章
ω1 o1
N1
α'
'
t
P
N2
t
o2
2
啮合角在数值上 等于节圆上的压力角。 等于节圆上的压力角。
rb 1 rb 2 = c os α ′ = r1′ r2 ′
第四节
一、外齿轮 1、名称和符号
渐开线标准直齿圆柱齿轮
,齿厚sk
齿数 z ,齿槽宽ek
同一圆上 齿顶圆(da 和 ra)
,
齿距pk
分度圆 齿顶圆 基圆 齿根圆
O
(5P102 (5-8)
第五节 渐开线直齿圆柱齿轮的啮合传动
一、渐开线直齿轮传动的轮齿啮合过程
一对轮齿在啮合线上啮合的开 始点—— 从动轮2的齿顶圆与 2 啮合线N1N2的交点B2 一对轮齿在啮合线上啮合的终 止点—— 主动轮的齿顶圆与 啮合线N1N2的交点B1。 实际啮合线—— 线段B1B2 理论啮合线—— 线段N1N2
齿轮机构:用于传递空间任意两轴之间的运 齿轮机构: 动和动力。 动和动力。 第一节 齿轮机构的类型和特点 一、概述 齿轮机构:圆形齿轮机构——定传动比 齿轮机构:圆形齿轮机构 定传动比 非圆形齿轮机构——变传动比 非圆形齿轮机构 变传动比
二、齿轮机构的传动类型
平面齿轮机构- 1、平面齿轮机构-传递两平行轴间的运动和动力
2 o2 ω2 P23
要使瞬时传动比为一常数, 要使瞬时传动比为一常数,则 o1 p应为定点 。
ω1 1 k1 k n
′ a1i12 a′ r2′ = ∴ r1′ = 1 + i12 1 + i12
r2′ ′ i12 = 又 a′ = r ′ + r2 节圆 1 r1′
r1′
p
齿轮传动机构

通常: 小轮x1 >0,大轮x2 <0 中心距a,啮合角α’不变 (高度变位)
机械原理—齿轮机构 正传动 x1+x2 >0
中心距a↑,啮合角α’↑
机械原理—齿轮机构 负传动 x1+x2 <0
中心距a↓,啮合角α’↓
机械原理—齿轮机构
齿 轮 传 高 角 动 度 度 类 负 正 零 变 变 型 传 传 ::传 位 :x 位 xx 1 11 动 动 x x动 x 2 22 0 00
问题2:G1、G3为同一基圆上所生成的两条反向渐
开线,试问 K1K2 和
K1' K
' 2
有何关系?
K1K2 K1'K2'
6.同一基圆上所生成的两条 反向渐开线为法向等距曲线。
机械原理—齿轮机构
Байду номын сангаас
4.3.3 渐开线方程
1.渐开线的压力角
cosK
rb rK
2.渐开线方程
K
rKrb/coαK s
invKKtgKK
C点:啮合节点,简称节点
机械原理—齿轮机构
齿廓啮合基本定律 齿廓接触点的公法线始终通过中心连线上一 定点,速比恒定。
节圆:由节点决定的圆 共轭齿廓 凡满足齿廓啮合基本定律而相互啮合的一对 齿廓
机械原理—齿轮机构
轭
两头牛背上的架子称为轭,轭使两头牛同步 行走。共轭即为按一定规律相配的一对。
机械原理—齿轮机构
rb—基圆半径; BK—渐开线发生线 θK—渐开线上K点的展角
机械原理—齿轮机构
4.3.2 渐开线的性质
1.渐开线的发生线展直前后长度不变;
弧ABKB
机械原理—齿轮机构
机械原理—齿轮机构 正传动 x1+x2 >0
中心距a↑,啮合角α’↑
机械原理—齿轮机构 负传动 x1+x2 <0
中心距a↓,啮合角α’↓
机械原理—齿轮机构
齿 轮 传 高 角 动 度 度 类 负 正 零 变 变 型 传 传 ::传 位 :x 位 xx 1 11 动 动 x x动 x 2 22 0 00
问题2:G1、G3为同一基圆上所生成的两条反向渐
开线,试问 K1K2 和
K1' K
' 2
有何关系?
K1K2 K1'K2'
6.同一基圆上所生成的两条 反向渐开线为法向等距曲线。
机械原理—齿轮机构
Байду номын сангаас
4.3.3 渐开线方程
1.渐开线的压力角
cosK
rb rK
2.渐开线方程
K
rKrb/coαK s
invKKtgKK
C点:啮合节点,简称节点
机械原理—齿轮机构
齿廓啮合基本定律 齿廓接触点的公法线始终通过中心连线上一 定点,速比恒定。
节圆:由节点决定的圆 共轭齿廓 凡满足齿廓啮合基本定律而相互啮合的一对 齿廓
机械原理—齿轮机构
轭
两头牛背上的架子称为轭,轭使两头牛同步 行走。共轭即为按一定规律相配的一对。
机械原理—齿轮机构
rb—基圆半径; BK—渐开线发生线 θK—渐开线上K点的展角
机械原理—齿轮机构
4.3.2 渐开线的性质
1.渐开线的发生线展直前后长度不变;
弧ABKB
机械原理—齿轮机构
机械原理齿轮机构解析
第60页/共89页
二、正确啮合条件
第61页/共89页
三、传动比及从动轮转向
当
时,
v v v
c2
c1
c 2c1
第62页/共89页
四、交错轴斜齿轮传动的优点
第55页/共89页
四、 斜齿轮的当量齿数
1) 原因 2) 研究对象 3) 方法 其长半轴 a=d/2cosβ 短半轴 b=d/2 椭圆在c点的曲率半径 当量齿数: a2 d
b 2cos2
Zv
2p mn
d mn cos2
mn z mn cos2
Z
cos3
第56页/共89页
五、斜齿轮的优缺点
法向模数mn和端面模数mt mn= mt cos β
第52页/共89页
法向(AOC平面)压力角an、端面 (AOB平面) 压力角at
法向(AOC平面)压力角an、 端面(AOB平面) 压力角at
tgan
OC OA
,
tgat
OB OA
及 OC=OBcosB 所以
tgan tgat cos
第53页/共89页
①可以减小齿轮机构的尺寸 ②可以改善齿轮的磨损情况 ③可以提高齿轮的承载能力 ④a’=a,可以成对替换标准齿轮和修复旧齿轮 ⑤必须成对设计、制造、使用,互换性差 ⑥εα略有减小 ⑦小齿轮正变位,齿顶易变尖
第39页/共89页
二、正传动(不等移距变位传动、角度变位传动)
(1)齿数条件:Z1+ Z2不受限制,α’>α,a’>a, y>0, △y >0
第9页/共89页
5-6 渐开线齿轮加工中的几个问题
1、齿厚计算与测量 2、 根切现象及原因 3、标准齿轮不发生根切的最少齿数 4、避免根切的最小变位系数xmin
二、正确啮合条件
第61页/共89页
三、传动比及从动轮转向
当
时,
v v v
c2
c1
c 2c1
第62页/共89页
四、交错轴斜齿轮传动的优点
第55页/共89页
四、 斜齿轮的当量齿数
1) 原因 2) 研究对象 3) 方法 其长半轴 a=d/2cosβ 短半轴 b=d/2 椭圆在c点的曲率半径 当量齿数: a2 d
b 2cos2
Zv
2p mn
d mn cos2
mn z mn cos2
Z
cos3
第56页/共89页
五、斜齿轮的优缺点
法向模数mn和端面模数mt mn= mt cos β
第52页/共89页
法向(AOC平面)压力角an、端面 (AOB平面) 压力角at
法向(AOC平面)压力角an、 端面(AOB平面) 压力角at
tgan
OC OA
,
tgat
OB OA
及 OC=OBcosB 所以
tgan tgat cos
第53页/共89页
①可以减小齿轮机构的尺寸 ②可以改善齿轮的磨损情况 ③可以提高齿轮的承载能力 ④a’=a,可以成对替换标准齿轮和修复旧齿轮 ⑤必须成对设计、制造、使用,互换性差 ⑥εα略有减小 ⑦小齿轮正变位,齿顶易变尖
第39页/共89页
二、正传动(不等移距变位传动、角度变位传动)
(1)齿数条件:Z1+ Z2不受限制,α’>α,a’>a, y>0, △y >0
第9页/共89页
5-6 渐开线齿轮加工中的几个问题
1、齿厚计算与测量 2、 根切现象及原因 3、标准齿轮不发生根切的最少齿数 4、避免根切的最小变位系数xmin
《机械原理》课件——第6章齿轮机构

➢ 齿轮机构的应用及分类
i = ω1 = O2C 12 ω2 O1C
➢ 齿廓啮合基本定律 齿廓曲线的选择 渐开线
➢ 渐开线齿廓的性质
渐开线的形成及性质 渐开线方程 渐开线齿廓的啮合特性
渐开线的形成及性质 形成? 性质?
1)
2)切点N是渐开线在点K处的曲率中心,NK 为曲率半径。渐开线上任意点的法线必切于基圆。
m 2
r'2 o2
非标准中心距安装
实际中心距a ' 标准中心距 a 两轮的分度圆不再相切
rb = r cosa = r cosa
N
分度圆压力角α已经标准化 GB/T 1356-1988
o
分度圆 :具有标准模数和标准压力角的圆。
齿轮的基本参数
4)齿顶高系数h*a
齿顶高: ha = ha* m
齿顶高系数
齿顶高系数h*a已经标准化
齿顶高系数h
* a
GB/T1357-1987
正常齿制 1
h a
短齿制 0.8
ra r
o
齿轮的基本参数
正确安装要求
顶隙为标准值 c=c*m
两轮齿侧间隙为零
=
12
se
=
12
es
o1 r'1
1
c*m C
r'2 o2
正确安装条件
顶隙为标准值 c=c*m
标准中心距 a
a
= r+ r12
标准中心距 a等于两齿轮分度圆 半径之和( r1 + r2)
r'1 r
f1
o1
1
c*m
C
r
a2
r'2
o2
机械原理第八章 齿轮机构

渐开线标准直齿圆柱齿轮的 基本参数和尺寸计算
渐开线齿轮的其他基本参数还有: 渐开线齿轮的其他基本参数还有: 齿数z、压力角α、齿顶高系数ha*和顶隙系数 和顶隙系数c*。 齿数 、压力角 、齿顶高系数 和顶隙系数 。
三、渐开线标准直齿轮的几何尺寸计算 标准齿轮的概念(三个特征): * 标准齿轮的概念(三个特征): (1)具有标准模数和标准压力角; )具有标准模数和标准压力角; (2)分度圆上的齿厚和槽宽相等; )分度圆上的齿厚和槽宽相等; (3)具有标准的齿顶高和齿根高。 )具有标准的齿顶高和齿根高。 内齿轮的特点: * 内齿轮的特点: —内齿轮的齿廓是内凹的; 内齿轮的齿廓是内凹的; 内齿轮的齿廓是内凹的 —齿根圆比分度圆大,齿顶圆 齿根圆比分度圆大, 齿根圆比分度圆大 比分度圆小但大于基圆; 比分度圆小但大于基圆; —齿厚相当于外齿轮的槽宽, 齿厚相当于外齿轮的槽宽, 齿厚相当于外齿轮的槽宽 槽宽相当于外齿轮的齿厚。 槽宽相当于外齿轮的齿厚。
第 八 章
齿 轮 机 构
由主动齿轮1的轮齿,通过齿廓依次推动从动 主动齿轮1 通过齿廓依次推动从动 齿轮2 而实现运动和动力的传递 运动和动力的传递, 齿轮2的轮齿,从而实现运动和动力的传递,称为 齿轮传动;这种机构即为齿轮机构。 齿轮传动;这种机构即为齿轮机构。 2 1
齿轮机构可以传递空间任意两轴间的运动和动力。 齿轮机构可以传递空间任意两轴间的运动和动力。
n1 z2 i = = n2 z1
i 称为平均传动比。 称为平均传动比 平均传动比。
瞬时传动比 常数的齿轮机构称为 的齿轮机构称为定传动比齿轮机构 i 为常数的齿轮机构称为定传动比齿轮机构。
第一节 齿轮机构的特点和分类
特点: 传递功率和圆周速度的范围很大; 特点:* 传递功率和圆周速度的范围很大;
机械原理齿轮传动 ppt课件
(3) 改变运动的传递方向
相交轴外啮合齿轮传动不仅改变齿轮的回转方 向还改变运动的传递方向
交错轴外啮合齿轮传动不仅改变齿轮的回转方
向还改变运动的传递方向
ppt课件
27
(4) 改变运动特性
齿轮齿条传动可以把一个转动变换为移动,或者把一个移动 变换为转动
非圆齿轮传动可以把一个匀速转动变换为非匀速转动,或者
ppt课件
38
1.渐开线的形成
当直线x-x沿半径为rb的圆作纯 滚动时,该直线上任一点K的 轨迹称为该圆的渐开线,该圆 称为渐开线的基圆,直线x-x 称为渐开线的发生线,角θK 称为渐开线AK段的展角。
ppt课件
39
2.渐开线的性质
1) 发生线在基圆上滚过的线段 长度 KN 等于基圆上被滚过的
圆弧长度 AN,即 KN AN 。
rb(K +K ) = AN = KN = rbtanK
故 K = tan K - K
式中K称为渐开线在K点的压力角,它是K点作用力F的方
向(K点渐开线的法线方向)与该点速度VK方向的夹角。
展角θK称为压力角K的渐开线pp函t课件数,工程上常用invK表示。42
综上所述,可得渐开线的极坐标参数方程为
自己通过阅读143~146页掌握齿廓法线法求解 共轭齿廓的方法。
ppt课件
34
曲面共轭的两个条件:
① 接触条件
两个曲面始终保持接触。
这两个曲面在坐标系 O x, y, z 的矢量方程为
(1)
r
(1
)
r
(1
)
(
x(u,
v),
y(u,
v),
z(u,
齿轮机械原理课件

G2
b a
K1K3 K1'K3'
齿轮机械原理课件
• 问题2:G1、G3为同一基圆上所生成的两条反向渐
开线,试问 k1k 2 和 k '1 k 2 '有何关系?
k1 K2’
K1’
k2
齿轮机械原理课件
• 问题2:G1、G3为同一基圆上所生成的两条反向渐
开线,试问 k1k 2 和 k '1 k 2 '有何关系?
齿轮机械原理课件
齿轮传动机构的特点 (1)直接接触的啮合传动;可传递空间任意两轴之
间的运动和动力; (2)功率范围大,速比范围大,效率高,精度高; (3)传动比稳定,工作可靠,结构紧凑; (4)改变运动方向; (5)制造安装精度要求高,不适于大中心距,成本
较高,且高速运转时噪声较大。
齿轮机械原理课件
,齿条的齿距均相等.
斜角(齿形角)。
(3) 分度线至 齿顶线的 高 度为齿顶高 ,分
度线至齿 根线的高 度 为齿根高
齿轮机械原理课件
标准安装
N1
B1
01
C
02
N2
B1点进入啮合瞬时
齿轮机械原理课件
标准安装
N1
r b1ቤተ መጻሕፍቲ ባይዱ
01
B1
C
r r ,
2
2
02
r r ,
1
1
B2
r b2
, N2
B2点脱离啮合瞬时
齿轮机械原理课件
设计:潘存云
m=4 z=16 m=2 z=16
齿轮机械原理课件
m=1 z=16
rb rk c o k s rc os Vk
F
k
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
i12 1 O2 P 2 O1P
❖要使两齿轮作定传动比传动, 则其齿廓曲线必须满足:
不论两齿廓在何位置接触,过接 触点所作的齿廓公法线必须与两齿
轮的连心线相交于一固定点P。
四、相关基本概念(续)
3. 节圆
齿轮的相对瞬心线
❖以O1、O2为圆心, 以O1P、O2P为半径的圆。
❖在P点处两轮的线速度相等,即:
二、齿廓啮合的基本要求
uK2K1.n = 0
n ----两齿廓接触点的公法矢
nK2K1 ----两齿廓接触点间的相对速
度
齿廓啮合的基本方程式
三、齿廓啮合基本定律
对齿廓曲线的要求:
直观上—— 不卡不离
几何学上—— 处处相切接触
vK2
运动学上—— 法线上没有相对运动vK2K1
根据三心定理,二齿轮啮合之速度瞬
4)基圆内无渐开线。
渐开线的性质(续)
C3
C2
C1
K
5) 渐开线的形状决于基圆半径
圆半径越大,渐开线越平展
(综合曲率半径越大)
B1
直线也是渐开线
B2
rb1 O1
A1
qi
A2
qi
rb2
O2
O
3
8
推论
? B1K1 B2K 2
同一基圆上渐开线形状相同
同一基圆所生成的同向渐开 A2
线为法向等距曲线
内公切线之间的夹角,在数值上 恒等于节圆压力角,用a’表示。
❖渐开线齿轮在传动过程中,啮合线和
啮合角始终不变。
第十章 齿轮机构及其设计
本章教学内容
◆齿轮机构的应用及其分类 ◆渐开线齿廓及其传动特点
◆渐开线直齿圆柱齿轮的
变位修正
◆渐开线直齿圆柱齿轮的基本参数
和几何尺寸
◆渐开线直齿圆柱齿轮的啮合传动
◆斜齿圆柱齿轮传动 ◆蜗杆传动 ◆圆锥齿轮传动
本章教学目的
使学生对齿轮传动的啮合原理有所了解,并能熟练 掌握齿轮的基本参数和几何尺寸的计算方法。
三、渐开线齿廓传动的特点
1. 传动比恒定不变
过 K 作两齿廓的公法线N1N 2 渐开线性质 N1N2必同时与两轮的基圆
相切,且为其内公切线。
N1N2与O1O2的交点P为一 定点。
i12
1 2
O2 P O1P
常数
三、渐开线齿廓传动的特点(续)
2. 渐开线齿轮传动的啮合线和啮合角
❖啮合线:是指两齿轮啮合点的轨迹。 ❖极限啮合点:N1 、N2 ❖啮合角:啮合线和两齿轮节圆的
可将齿轮机构分为两大类:
1. 变传动比传动的齿轮机构 这种齿轮机构一般是
非圆形的,所以又称为非 圆齿轮机构。 2. 定传动比传动齿轮机构
这种齿轮机构中的齿轮都是圆形的,所以又称为圆形 齿轮机构。
二、圆形齿轮机构的类型
1. 平面齿轮机构
外 啮 合 齿 轮 传 动
1.直 齿 圆 柱 齿 轮 传 动内 啮 合 齿 轮 传 动
该圆称基圆(rb);该直线称为发生线
基圆
F
vK
渐开线
压力角 aK
K
rK 向径
发生线 基圆
aK
rb
qK 展角
基圆半径 rb
二、渐开线的性质
渐开线的性质 1)发生线沿基圆滚过的长度,等 于基圆上被滚过的圆弧长度,即:
AB = BK 2)渐开线上任意点的法线必切于基圆。 3)渐开线距基圆越远的部分,曲率半 展角 径愈大,反之亦然。
齿廓曲线
n
实际选用, 须考虑设计、制造、安装、
使用等因素
常用: 渐开线、摆线、变态摆线、 圆弧线、抛物线等
本章主要研究渐开线齿廓的齿轮
O1
1
1 n
C2 K
节圆
C1 P
节圆
2
2
O2
§10-3 渐开线齿廓的啮合特点
一、渐开线的形成
当一直线在一圆周上作纯滚动时,此直线上任一点的轨 迹---该圆的渐开线
ቤተ መጻሕፍቲ ባይዱ
直齿圆锥齿轮传动
1.圆锥齿轮传动斜齿圆锥齿轮传动
曲齿圆锥齿轮传动
2.螺旋齿轮传动
3.蜗轮蜗杆传动
二、圆形齿轮机构的类型(续)
锥 齿 轮 传 动
二、圆形齿轮机构的类型(续)
蜗杆传动
交 错 轴 斜 齿 轮 传 动
§10-2 齿廓啮合基本定律
一、共轭齿廓
如果两轮的转动能实现预 定的传动比,则两轮相互接 触传动的一对齿廓称为共轭 齿廓。
§10-1 齿轮机构的应用及分类
齿轮机构是现代机械中应用最为广泛的一种 传动机构,可以用来传递空间任意两轴间的运动 和动力。
二、特点
可用来传递空间任意两轴之间的运动和动力 传动比准确、平稳 结构紧凑,适用圆周速度和功率范围广 机械效率高 使用寿命长,工作安全可靠
一、根据一对齿轮在啮合过程中传动比是否恒定
vK1
心P
i12
1 2
O2 P O1P
n
齿廓啮合基本定律:
O1
1
C2 K
1 n
C1 P
2
2
互相啮合的一对齿轮,在任一位置时
的传动比,都与其连心线被其啮合点
O2
的公法线所分两线段成反比
四、相关基本概念
1. 啮合节点(节点)
即两齿轮的相 对瞬心
指过两齿廓接触点所作的齿廓公 法线nn与两轮连心线O1O2的交点. 2. 定传动比条件
A1
? A1B1 A2B2
两反向渐开线公法线处处相等 (等于两渐开线间的基圆弧长)
C1
N1 N2
C3
B1 K1
B2
B
K2
K
O
二、渐开线方程
1. 压力角ak 指K点所受正压力的方向(渐开
线法线方向)与K点速度方向线之
间所夹的锐角。 2. 渐开线函数 由渐开线性质,有: AB = BK
rb (ak + qk ) = AB = BK = rb tg ak
qk = tg ak - ak
❖ qk 就是压力角ak的渐开线函数,用 invak来表示。
二、渐开线方程(续)
3. 渐开线的极坐标参数方程
rk= rb/cos ak qk = inv ak= tg ak - ak
4. 渐开线的直角坐标方程
x rb sin u rbu cos u y rb cos u rbu sin u
齿 轮 与 齿 条 传 动
2.斜 齿 圆 柱 齿 轮 传 动
3.人 字 齿 轮 传 动
二、圆形齿轮机构的类型(续)
内啮合齿轮传动
外 啮 合 齿 轮 传 动
二、圆形齿轮机构的类型(续)
齿轮齿条传动
二、圆形齿轮机构的类型(续)
斜
齿
人
圆
字
柱
齿
齿
轮
轮
传
传
动
动
二、圆形齿轮机构的类型(续)
2. 空间齿轮机构
1 O1 P 2 O2 P, ❖两齿轮的啮合传动相当于两节圆作无滑 动的纯滚动。
4. 节线 指实现变传动比传动的两齿轮的
相对瞬心线,为某种非圆曲线。
三、齿廓曲线的确定
能满足定传动比(或某种变传动比
规律)要求的齿廓曲线,理论上有
无穷多个
vK2
vK2K1
理论上无穷多共轭曲线:能满足定
vK1
传动比(或某种变传动比规律)要求的
❖要使两齿轮作定传动比传动, 则其齿廓曲线必须满足:
不论两齿廓在何位置接触,过接 触点所作的齿廓公法线必须与两齿
轮的连心线相交于一固定点P。
四、相关基本概念(续)
3. 节圆
齿轮的相对瞬心线
❖以O1、O2为圆心, 以O1P、O2P为半径的圆。
❖在P点处两轮的线速度相等,即:
二、齿廓啮合的基本要求
uK2K1.n = 0
n ----两齿廓接触点的公法矢
nK2K1 ----两齿廓接触点间的相对速
度
齿廓啮合的基本方程式
三、齿廓啮合基本定律
对齿廓曲线的要求:
直观上—— 不卡不离
几何学上—— 处处相切接触
vK2
运动学上—— 法线上没有相对运动vK2K1
根据三心定理,二齿轮啮合之速度瞬
4)基圆内无渐开线。
渐开线的性质(续)
C3
C2
C1
K
5) 渐开线的形状决于基圆半径
圆半径越大,渐开线越平展
(综合曲率半径越大)
B1
直线也是渐开线
B2
rb1 O1
A1
qi
A2
qi
rb2
O2
O
3
8
推论
? B1K1 B2K 2
同一基圆上渐开线形状相同
同一基圆所生成的同向渐开 A2
线为法向等距曲线
内公切线之间的夹角,在数值上 恒等于节圆压力角,用a’表示。
❖渐开线齿轮在传动过程中,啮合线和
啮合角始终不变。
第十章 齿轮机构及其设计
本章教学内容
◆齿轮机构的应用及其分类 ◆渐开线齿廓及其传动特点
◆渐开线直齿圆柱齿轮的
变位修正
◆渐开线直齿圆柱齿轮的基本参数
和几何尺寸
◆渐开线直齿圆柱齿轮的啮合传动
◆斜齿圆柱齿轮传动 ◆蜗杆传动 ◆圆锥齿轮传动
本章教学目的
使学生对齿轮传动的啮合原理有所了解,并能熟练 掌握齿轮的基本参数和几何尺寸的计算方法。
三、渐开线齿廓传动的特点
1. 传动比恒定不变
过 K 作两齿廓的公法线N1N 2 渐开线性质 N1N2必同时与两轮的基圆
相切,且为其内公切线。
N1N2与O1O2的交点P为一 定点。
i12
1 2
O2 P O1P
常数
三、渐开线齿廓传动的特点(续)
2. 渐开线齿轮传动的啮合线和啮合角
❖啮合线:是指两齿轮啮合点的轨迹。 ❖极限啮合点:N1 、N2 ❖啮合角:啮合线和两齿轮节圆的
可将齿轮机构分为两大类:
1. 变传动比传动的齿轮机构 这种齿轮机构一般是
非圆形的,所以又称为非 圆齿轮机构。 2. 定传动比传动齿轮机构
这种齿轮机构中的齿轮都是圆形的,所以又称为圆形 齿轮机构。
二、圆形齿轮机构的类型
1. 平面齿轮机构
外 啮 合 齿 轮 传 动
1.直 齿 圆 柱 齿 轮 传 动内 啮 合 齿 轮 传 动
该圆称基圆(rb);该直线称为发生线
基圆
F
vK
渐开线
压力角 aK
K
rK 向径
发生线 基圆
aK
rb
qK 展角
基圆半径 rb
二、渐开线的性质
渐开线的性质 1)发生线沿基圆滚过的长度,等 于基圆上被滚过的圆弧长度,即:
AB = BK 2)渐开线上任意点的法线必切于基圆。 3)渐开线距基圆越远的部分,曲率半 展角 径愈大,反之亦然。
齿廓曲线
n
实际选用, 须考虑设计、制造、安装、
使用等因素
常用: 渐开线、摆线、变态摆线、 圆弧线、抛物线等
本章主要研究渐开线齿廓的齿轮
O1
1
1 n
C2 K
节圆
C1 P
节圆
2
2
O2
§10-3 渐开线齿廓的啮合特点
一、渐开线的形成
当一直线在一圆周上作纯滚动时,此直线上任一点的轨 迹---该圆的渐开线
ቤተ መጻሕፍቲ ባይዱ
直齿圆锥齿轮传动
1.圆锥齿轮传动斜齿圆锥齿轮传动
曲齿圆锥齿轮传动
2.螺旋齿轮传动
3.蜗轮蜗杆传动
二、圆形齿轮机构的类型(续)
锥 齿 轮 传 动
二、圆形齿轮机构的类型(续)
蜗杆传动
交 错 轴 斜 齿 轮 传 动
§10-2 齿廓啮合基本定律
一、共轭齿廓
如果两轮的转动能实现预 定的传动比,则两轮相互接 触传动的一对齿廓称为共轭 齿廓。
§10-1 齿轮机构的应用及分类
齿轮机构是现代机械中应用最为广泛的一种 传动机构,可以用来传递空间任意两轴间的运动 和动力。
二、特点
可用来传递空间任意两轴之间的运动和动力 传动比准确、平稳 结构紧凑,适用圆周速度和功率范围广 机械效率高 使用寿命长,工作安全可靠
一、根据一对齿轮在啮合过程中传动比是否恒定
vK1
心P
i12
1 2
O2 P O1P
n
齿廓啮合基本定律:
O1
1
C2 K
1 n
C1 P
2
2
互相啮合的一对齿轮,在任一位置时
的传动比,都与其连心线被其啮合点
O2
的公法线所分两线段成反比
四、相关基本概念
1. 啮合节点(节点)
即两齿轮的相 对瞬心
指过两齿廓接触点所作的齿廓公 法线nn与两轮连心线O1O2的交点. 2. 定传动比条件
A1
? A1B1 A2B2
两反向渐开线公法线处处相等 (等于两渐开线间的基圆弧长)
C1
N1 N2
C3
B1 K1
B2
B
K2
K
O
二、渐开线方程
1. 压力角ak 指K点所受正压力的方向(渐开
线法线方向)与K点速度方向线之
间所夹的锐角。 2. 渐开线函数 由渐开线性质,有: AB = BK
rb (ak + qk ) = AB = BK = rb tg ak
qk = tg ak - ak
❖ qk 就是压力角ak的渐开线函数,用 invak来表示。
二、渐开线方程(续)
3. 渐开线的极坐标参数方程
rk= rb/cos ak qk = inv ak= tg ak - ak
4. 渐开线的直角坐标方程
x rb sin u rbu cos u y rb cos u rbu sin u
齿 轮 与 齿 条 传 动
2.斜 齿 圆 柱 齿 轮 传 动
3.人 字 齿 轮 传 动
二、圆形齿轮机构的类型(续)
内啮合齿轮传动
外 啮 合 齿 轮 传 动
二、圆形齿轮机构的类型(续)
齿轮齿条传动
二、圆形齿轮机构的类型(续)
斜
齿
人
圆
字
柱
齿
齿
轮
轮
传
传
动
动
二、圆形齿轮机构的类型(续)
2. 空间齿轮机构
1 O1 P 2 O2 P, ❖两齿轮的啮合传动相当于两节圆作无滑 动的纯滚动。
4. 节线 指实现变传动比传动的两齿轮的
相对瞬心线,为某种非圆曲线。
三、齿廓曲线的确定
能满足定传动比(或某种变传动比
规律)要求的齿廓曲线,理论上有
无穷多个
vK2
vK2K1
理论上无穷多共轭曲线:能满足定
vK1
传动比(或某种变传动比规律)要求的