几种基本时间延迟估计方法及其相互关系
时间延缓和长度缩短

第3章 狭义 相对论
3 - 3 时间延缓和长度收缩
u
S
S
.
第十八章狭义 相对论 (陈信义第二版)
大学物理教程
弟 a. e f 弟 0
x
x
在 S 系中观察者总觉得相对于自己运动的S系的 钟较自己的钟走得慢。
结论:对本惯性系做相对运动的钟(或事物经历的
3 - 3 时间延缓和长度收缩
第十八章狭义 相对论 (陈信义第二版)
大学物理教程
练 习
3-2 3-7 3-11
第3章 狭义 相对论
3-3
3-18
3 - 3 时间延缓和长度收缩
第十八章狭义 相对论 (陈信义第二版)
大学物理教程
地球的半径约为R0=6376km,它绕太阳的速率 约为v =30km/s,在太阳参照系中测量地球的 半径在哪个方向上缩短得最多?缩短了多少?
结论 :沿两个惯性系运动方向,不同地点发生的两个事 件,在其中一个惯性系中是同时的, 在另一惯性系中观察则不 同时,所以同时具有相对意义;只有在同一地点, 同一时刻发 生的两个事件,在其他惯性系中观察也是同时的 .
第3章 狭义 相对论
3 - 3 时间延缓和长度收缩
第十八章狭义 相对论 (陈信义第二版)
t t 0 v 2 1 ( ) c
t t0
时间延缓 :运动的钟走得慢 .
第3章 狭义 相对论
3 - 3 时间延缓和长度收缩
第十八章狭义 相对论 (陈信义第二版)
大学物理教程
注意
1)时间延缓是一种相对效应 . 2)时间的流逝不是绝对的,运动将改变 时间的进程.(例如新陈代谢、放射性的衰变、 寿命等 . ) 3) v c 时, t t 0
时间延缓和长度收缩

测长最短 对长度收缩效应的更普遍说法。
在涉及某个参考系中两个同时发生的事件 的问题中,一般应先确定哪个是测长。 • 长度收缩与同时性的相对性有关,是不同惯 性系之间进行时间测量的结果。 • 长度收缩只发生在物体运动的方向上,在垂直 方向上不收缩 纵向收缩,横向不收缩。 • 长度收缩纯属时空性质,与在热胀冷缩现象中 所发生的实际的收缩和膨胀是完全不同的。
绝对时空观认为:如果两个事件在某一惯性 系中同时发生,则在任何其他惯性系中观测, 这两个事件也一定同时发生。
同时性的绝对性。
由洛伦兹变换可知,同时性是相对的: 在某 一惯性系中同时发生的两个事件,在其他作相 对运动的惯性系中观测就不一定同时发生了。
同时发生
?
先发生 后发生
u u ( t t ) 2 ( x ( x 2 x1 ) 2 x1 ) 2 c c 0 t 2 t1 2 2 1 u2 c 2 1 u c
时间延缓效应的更一般的说法: 在一个惯性系中观测,在另一个运动惯性系 中同一地点发生的任何过程(包括物理、化学 和生命过程)的节奏要变慢。
孪生子佯谬
孪生子效应„„
【例】在大气上层存在大量的称为 子的基本 粒子。 子不稳定,在相对其静止的参考系中平 均经过2.2106s就自发地衰变成电子和中微子, 这一时间称为子的固有寿命。尽管子的速率高 达 0.998c,但按其固有寿命计算它从产生到衰变 只能平均走过650m的路程。一般产生子的高空 离地面 8000m 左右,为什么在地面可以检测到 子? 解 两个事件:子的产生和子的衰变。
【例】设有静止的许多已经校准的同步钟(静 钟),它们的指针走一个格所用时间都为1s。如 果让其中的一个钟以 u=0.8c 的速度相对静止观察 者运动,那么在静止观察者看来这个运动的钟 (动钟)的指针走一个格用多少时间? 解 事件1:这个钟的指针刚开始转一个格 事件2:指针转完一个格 在相对钟静止的参考系中,事件 1 、 2 同地发 生,时间间隔 1s 为原时。 在静止观察者看来,这两个事件的时间间隔:
时延估计原理

时延估计原理
时延估计原理是指在网络通信中,为了评估数据传输所需的时间延迟,所采用的一种方法。
它通过测量数据从发送端到接收端所经历的时间来进行估计。
时延估计原理对于网络通信的稳定性和效率至关重要,因此被广泛应用于网络工程和通信领域。
在网络通信中,时延是指数据从发送端到接收端所经历的时间。
时延估计原理可以分为四个方面进行评估。
首先是发送时延,即从发送数据开始到数据完全发送出去所经历的时间。
发送时延主要取决于数据的大小和网络的传输速率。
数据越大,传输速率越慢,发送时延就越长。
其次是传播时延,即数据在传输介质中传播所需的时间。
传播时延主要取决于传输介质的长度和信号传输速度。
传输介质越长,信号传输速度越慢,传播时延就越长。
再次是处理时延,即数据在网络设备中进行处理所需的时间。
处理时延主要取决于网络设备的性能和负载情况。
网络设备性能越好,负载越轻,处理时延就越短。
最后是排队时延,即数据在网络设备的缓冲区中等待传输所需的时间。
排队时延主要取决于网络设备的缓冲区大小和数据传输的速率。
缓冲区越小,数据传输速率越快,排队时延就越短。
时延估计原理通过对这四个方面的评估,可以得出数据传输所需的总时延。
在实际应用中,时延估计原理可以用于优化网络性能,提高数据传输的效率和稳定性。
时延估计原理是网络通信中的重要方法,通过对发送时延、传播时延、处理时延和排队时延的评估,可以对数据传输的时间延迟进行估计。
它在网络工程和通信领域具有广泛的应用,对于提高网络性能和数据传输效率至关重要。
时延估计方法
•多径时延估计
• 已知信号多径时延估计(EM算法实现ML) • 含噪参考信号多径时延估计(循环相关函数的LS法) • 未知波形信号的多径参数估计(music算法、esprit算法)
离散型的已知信号多径时延估计模型如下所示:
极大似然估计(MxaimmuLikehhoodEstimatino)是 参数估计问题的有效方法,具有近似最佳的估计性能 及稳健性。但是,鉴于多信号多参数估计问题所需多 维优化的复杂性,在多径时延估计问题中直接使用极 大似然方法显然并不可行。
自适应时延估计方法它把有时间延迟的信号看成是基本信号经过了相移滤波器hn后得到的信号把基本信号看成是参考信号两路信号输入自适应滤波器的输入端经过自适应滤波器权矢量的迭代将基本信号加工成时间延迟信号以两信号的最小均方误差为准则由权矢量的最大值得到时延估值
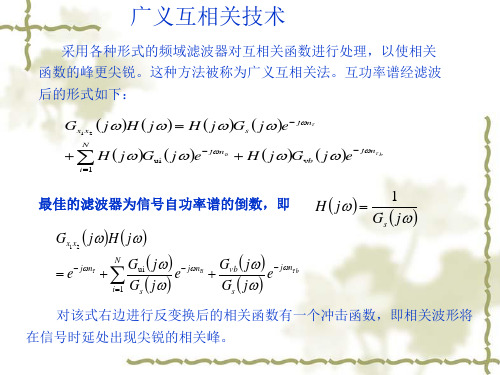
广义ቤተ መጻሕፍቲ ባይዱ相关技术
采用各种形式的频域滤波器对互相关函数进行处理,以使相关 函数的峰更尖锐。这种方法被称为广义互相关法。互功率谱经滤波 后的形式如下:
通过对二次相关函数峰值的估计就可提取时延信息。 优越性在于相关计算过程中,减少了噪声对信号的影响,与 一次相关法相比可以在更低的信噪比环境中估计时间延迟。
计算信号的相关函数时,计算量很大。为了减少计算 量,根据维纳辛钦定理,可以采用FFT(快速傅立叶变换) 进行快速计算以减少计算量。
基于相关系数的窄带时间延迟估计方法
• 二次相关法
信号模型:
由于噪声功率对信号的影响直接影响了一次互相关法 对信号进行时延估计时精度,所以进一步的降低噪声对信号 的影响是提高时延估计精度的方法之一。在此基础上提出 了时延估计的二次相关法以进一步在低信噪比的环境下保 证一定的时延估计精度。
二次相关时延估计算法的基本原理:将x1(n)的自相关 函数和x1(n)与x2(n)的互相关函数R12再做相关运算,以 进一步降低噪声对时延估计精度的影响。
matlab 时延估计算法
matlab 时延估计算法
Matlab中有多种时延估计算法可用,具体选择哪种算法取决于需要解决的问题和
数据的特点。
以下是几种常见的时延估计算法:
1. 互相关法(Cross-Correlation Method):通过计算信号之间的互相关性来估计
时延。
使用`xcorr`函数可以实现。
2. 相位差法(Phase Difference Method):通过计算信号的相位差来估计时延。
可
以使用`angle`函数计算信号的相位差。
3. 激励波形匹配法(Excitation Signal Matching Method):通过比较输入信号和
输出信号之间的差异来估计时延。
可以使用最小二乘法或其他优化算法来实现。
4. 均方差法(Mean Square Error Method):通过最小化输入信号和输出信号之间
的均方差来估计时延。
可以使用`mean`和`sqrt`函数计算均方差。
5. 互信息法(Mutual Information Method):通过计算信号之间的互信息来估计时延。
可以使用`mutualinfo`函数实现。
以上是一些常见的时延估计算法,实际应用中可能还有其他算法可供选择。
具体
选择哪种算法应根据实际情况来确定,包括信号特性、计算复杂度和精度要求等。
时延估计算法地方法很多

时延估计算法的方法很多,广义互相关函数法(Gee, Genear I i zedeross-ocerrat Inin)运用最 为广泛"广义互相关法通过求两信号之间的互功率谱,并在频域内给予一定的加权,来抑制噪 声和反射的影响,再反变换到时域,得到两信号之间的互相关函数"其峰值位置,即两信号之 间的相对吋延45IH, 6],时延估计过程如图1 一 7所示”设h. (n), h 2 (n)分别为声源信号s (n)到两麦克风的冲激响应,則麦克风接收到的信号为:Xi (n) =hi (n) 0S (n) +ni (n) (1. 1)x 2 (n) =h 2 (n) 0 s (n) +n 2 (n) (1.2)基于子空间的定位技术来源于现代高分辨率谱估计技术。
子空间技术是阵列信号 处理技术中研究最多、应用最广、最基本也是最重要的技术之一。
该类声源定位 技术是利用接收信号相关矩阵的空间谱,求解麦克风间的相关矩阵来确定方向角, 从而进一步确定声源位置。
子空间类方法主要分两类,一类是利用阵列自相关矩 阵主特征向量(即信号子空间)的主分量方法,如AR 参数模型主分量法,BT 主 分量法等;另一类方法是以信号子空间和噪声子空间的正交性原理为基础,利用 组成噪声子空间的特征向量来进行谱估计,这类算法主要有多重信号分类法(MUSIC), Johnson 法,最小范数(Mini-Norm)法,MUSIC 根(Root-MUSIC)法, 旋转不变信号参数估计(ESPRIT)法,等等。
在实际中,基于子空间的定位技术 的空间谱的相关矩阵是未知的,必须从观测信号中来估计,需要在一定时间间隔 内把所有信号平均来得到,同时要求接收信号处于声源、噪声、估计参数固定不 变的环境和有足够多的信号平均值。
即便满足这此条件,该算法也不如传统的波 束形成方法对声源和麦克风模型误差的鲁棒性好。
目前定位问题所涉及算法都是 研究远场的线性阵列情况。
时延估计算法
时延估计算法
时延估计算法是一种用于估计信号传输时延的方法。
它通常基于源距离接收阵的距离和方向,以及两个阵元间由于声程差而产生的到达时延差。
基本互相关时延估计方法的原理是,假设两个接收信号分别为$x_1(t)$和$x_2(t)$,其中$x_1(t)=s(t)+n_1(t)$,$x_2(t)=s(t-D)+n_2(t)$。
时延估计即估计其中的$D$值。
由于信号传播过程中引入了噪声$n$,所以对时延估计的问题进行研究时,其实是一个统计问题,研究的是一个随机信号分析。
时延估计中常使用最大似然估计,因为其具有无偏、有效和一致性三大性质。
而时延估计的最大似然估计经过推导可以发现其是一个相关器。
理论上在时刻$D$时,两阵元信号相似度最高,此时是相关器峰值位置。
我们在对两路信号作互相关之后再进行峰值检测即可得到时延$D$。
广义互相关时延估计方法的基本流程如下:首先对两路接收信号$x_1$和$x_2$作预滤波处理,然后对两路预处理输出信号$y_1$,$y_2$,求取互相关函数,称之为GCC函数,最后对GCC函数作峰值检测,对应的时间值即为时延估值$D$。
总的来说,时延估计算法在实际应用中受到了广泛的关注和应用,但在不同的应用场景中,需要根据实际情况选择合适的算法和参数配置。
时间序列预测方法比较以及适用范围描述
时间序列预测方法比较以及适用范围描述时间序列预测方法是通过对已有的时间序列数据进行分析和建模,以预测未来一段时间内的数据趋势和变化。
在实际应用中,选择合适的时间序列预测方法对于准确预测未来的趋势非常重要。
本文将比较几种常见的时间序列预测方法并描述它们的适用范围。
一、移动平均法移动平均法是一种简单的时间序列预测方法,它假设未来的值等于过去一段时间内的观测值的平均值。
在移动平均法中,预测值是根据过去一段时间内的数据计算得出的。
这种方法适用于数据没有明显趋势和季节性,并且在时间序列中的数据波动较小的情况下。
二、指数平滑法指数平滑法是一种常用的时间序列预测方法,它以指数的形式对过去观测值进行加权平均,赋予近期观测值更高的权重。
指数平滑法的特点是可以很好地适应数据的趋势和季节性变化。
这种方法适用于数据具有明显的趋势性和季节性,并且在时间序列中的数据波动较大的情况下。
三、季节性分解法季节性分解法是将时间序列数据分解为趋势、季节性和随机成分三个部分的预测方法。
首先,通过移动平均法或指数平滑法去除数据中的季节性和随机成分,得到趋势性数据;然后,通过适当的数学模型对趋势性数据进行预测,得到未来的趋势;最后,将季节性和随机成分加回趋势性预测值,得到完整的时间序列预测结果。
季节性分解法适用于数据具有明显的季节性变化,并且在时间序列中的季节性和随机成分影响较大的情况下。
四、ARIMA模型ARIMA模型是一种广泛应用的时间序列预测方法,它能够捕捉到时间序列数据中的趋势、季节性和随机成分,从而提供较准确的预测结果。
ARIMA模型是通过对时间序列数据进行差分和自回归建模来实现的。
根据差分的次数和自回归的阶数,可以构建出不同的ARIMA模型。
这种方法适用于数据具有较明显的趋势性和季节性变化的情况下。
五、神经网络模型神经网络模型是一种基于人工神经网络的时间序列预测方法。
它通过对时间序列数据进行训练,建立神经网络模型,然后利用该模型进行预测。
时滞估计技术
时滞估计技术时滞估计技术有多种方法和算法,下面我们将介绍其中的几种常用方法。
1. 交叉相关法:交叉相关法是一种常用的时滞估计方法。
它利用输入和输出信号的相关性来估计时滞。
通过计算输入信号和输出信号之间的交叉相关函数,可以得到时滞的估计值。
这种方法简单易行,适用于线性系统和非线性系统。
2. 系统辨识法:系统辨识法是一种基于模型的时滞估计方法。
它通过建立系统的数学模型,利用已知的输入和输出数据来估计时滞。
常用的系统辨识方法有参数辨识法和非参数辨识法等。
这种方法需要较多的计算和数据处理,但可以得到较准确的时滞估计结果。
3. 自适应法:自适应法是一种实时估计时滞的方法。
它通过不断调整估计器的参数来逼近真实的时滞值。
自适应法可以实时地跟踪系统时滞的变化,适用于时滞随时间变化的系统。
时滞估计技术在实际应用中具有广泛的应用。
下面我们将介绍几个典型的应用场景。
1. 控制系统:在控制系统中,时滞会对系统的稳定性和性能产生重要影响。
通过估计时滞,可以优化控制算法,提高系统的响应速度和鲁棒性。
时滞估计技术在自动驾驶、飞行器控制等领域具有重要应用。
2. 通信系统:在通信系统中,时滞会导致信号失真和误码率的增加。
通过估计时滞,可以对信号进行补偿,提高通信系统的可靠性和性能。
时滞估计技术在无线通信、雷达信号处理等领域得到广泛应用。
3. 信号处理:在信号处理领域,时滞会导致信号的时域和频域特性发生变化。
通过估计时滞,可以对信号进行校正,提高信号处理的准确性和效果。
时滞估计技术在语音识别、图像处理等领域有重要应用。
时滞估计技术的研究和应用还存在一些挑战。
首先,时滞估计方法需要考虑系统的非线性和时变性,这增加了算法的复杂性。
其次,时滞估计需要依赖输入和输出信号的数据,数据的质量和采样率对估计结果有重要影响。
此外,时滞估计方法的实时性和计算复杂度也是需要考虑的问题。
总结起来,时滞估计技术是一种重要的信号处理方法,具有广泛的应用前景。
应用时间序列分析模型分析我国航班延误问题
应用时间序列分析模型分析我国航班延误问题
航班延误是指航班在计划起飞或降落时间之前或之后延误的情况。
航班延误问题对航空运输系统的安全性、效率和旅客的满意度都会产生严重影响。
了解和分析航班延误问题对于航空运输管理部门和旅客都是非常重要的。
为了分析我国航班延误问题,可以首先采用时间序列分析模型。
时间序列分析是一种统计学上的方法,用来分析随时间变化的数据。
在航班延误问题中,可以将航班延误的数据按时间顺序进行组织和分析,以便找出其规律和趋势。
下面将介绍几种常用的时间序列分析模型及其应用。
可以使用移动平均模型。
移动平均模型是通过计算一系列时间段内的平均值来预测未来数据。
对于航班延误问题,可以通过计算每月、每季度或每年的平均延误时间来分析延误趋势。
这样一来,航空运输管理部门可以根据移动平均模型的预测结果来制定相应的航班安排和调度策略,以减少航班延误。
应用时间序列分析模型可以帮助我们更好地了解和分析我国航班延误问题。
航空运输管理部门可以根据时间序列分析模型的结果来制定相应的航班安排和调度策略,以提高航班的准点率和旅客的满意度。
这对于保障航空运输系统的安全性、效率和可靠性都具有重要意义。