全站仪导线复测步骤与计算
全站仪导线测量原理

全站仪导线测量原理一、全站仪导线测量的概述全站仪导线测量是一种广泛应用的测量技术,它通过全站仪进行高精度角度和距离测量,实现平面控制测量。
全站仪导线测量具有自动化程度高、精度稳定可靠、操作简便等优点,广泛应用于城市规划、建筑、交通、水利等领域。
二、全站仪导线测量的基本原理全站仪导线测量的基本原理是利用全站仪进行角度和距离的测量,通过数学计算得出测量点的平面坐标。
全站仪是一种集测距仪、电子经纬仪和计算机技术于一身的智能型测量仪器,它可以通过内部计算机系统自动进行数据采集和处理,大大提高了测量的精度和效率。
具体来说,全站仪导线测量的基本步骤如下:1.在测量区域布设控制点,通常选择地势较高、通视良好的位置。
2.在控制点上架设全站仪,对中整平,设置测站点和后视点,输入相关参数,如仪器高、棱镜高、气压等。
3.配置全站仪参数,包括坐标系统、投影参数、单位设置等,确保与实际工程要求一致。
4.对测量区域进行角度和距离测量,通过全站仪的望远镜和内置计算机系统进行数据自动记录和处理。
5.根据测量的角度和距离数据,通过数学计算得出测量点的平面坐标。
三、全站仪导线测量的实施步骤1.确定测量方案:根据工程要求和实际情况,确定测量范围、控制点布设方案、测量精度等。
2.准备工具和资料:准备全站仪、棱镜、脚架、记录本、测绳等工具,收集相关资料,如地形图、控制点资料等。
3.实地踏勘:对测量区域进行实地踏勘,了解地形地貌、建筑物等情况,以便更好地布设控制点和选择合适的测量方法。
4.控制点布设:根据测量方案和控制点布设要求,在测量区域内选择合适的位置布设控制点,并做好标记。
控制点应尽量均匀分布,方便后续测量和数据处理。
5.全站仪架设与校准:将全站仪安装在三脚架上,对中整平,然后进行校准。
校准包括对中器校准、水平器校准和误差校准等,以确保测量的精度和准确性。
6.角度和距离测量:根据实际情况选择合适的测量模式,如距离模式、角度模式或跟踪模式等。
全站仪三维导线测量 全站仪导线测量数据表
全站仪三维导线测量全站仪导线测量数据表全站仪三维导线测量一、观测方法如下图所示附合导线,已知A、B、C、D各点的三维坐标,要观测并平差计算1、2、3、4各点的三维坐标。
124D3C1、在A点和1点分别设置棱镜,对中、整平后量取棱镜高。
2、在B点架设全站仪,对中、整平后量取仪器高。
3、全站仪开机,按坐标测量键进入坐标测量模式,进行坐标测量。
注意:要先设置测站坐标,仪器高,目标高及后视方位角。
输入后视点坐标瞄准A点的棱镜,在坐标测量模式下,按[F4]键,转到第2页功能。
按[F2]键。
仿照上面的方法输入A点坐标。
测量瞄准1点的棱镜,在坐标测量模式下,转到第1页功能,按[F2]键,则可测出1点的坐标,按[F1]键可以保留观测数据。
4、将全站仪搬站至1点,以1为测站,以B为后视,观测2点,记录其坐标。
5、将全站仪搬站至2点,以2为测站,以1为后视,观测3点,记录其坐标。
6、将全站仪搬站至3点,以3为测站,以2为后视,观测4点,记录其坐标。
7、将全站仪搬站至4点,以4为测站,以3为后视,观测C 点,记录其坐标。
二、成果计算1、计算纵、横坐标闭合差fx=X C’-XC fy=YC’-YC2、计算导线全长闭合差、相对闭合差 fD=fx+fy22k=1D/f3、计算各点坐标改正数vxi=-fxåDD× vyi=-fyåD×式中:å导线边长之和Di第i点之前导线边长4、计算改正后各点坐标Xi=Xi’+Vxi Yi=Yi’+Vyi5、计算高程闭合差fH=HC’-HC (HC’是C点的高程观测值) 6、计算各点高程改正数vHi=-fHD×7、计算改正后各点高程Hi=Hi’+VHi (Hi’是i点的高程观测值)全站仪坐标放样放样模式有两个功能,即测定放样点和利用内存中的已知坐标数据设置新点。
用于放样的坐标数据可以是内存中的点,也可以是从键盘输入的坐标。
坐标数据可通过传输电缆从计算机装入仪器内存。
导线复测内业计算公式

导线复测内业计算公式1、坐标反算:D=V(X1-X2)2 +(Y1-Y2)2 (距离)a二arctan (Y2-Y1) + ( X2-X1)(坐标方位角)说明:当厶Y+ △ X+第一象限当A Y+ △ X-第二象限+180 °当A Y- △ X-第三象限+180 °当A Y- △ X+第四象限+360 °直线AB的坐标方位角a AB,称为直线AB的正坐标方位角。
直线BA的坐标方位角a BA称为直线AB的反坐标方位角,也是直线BA的正坐标方位角。
a AB与a BA的坐标相差180度,互为正、反坐标方位角。
即a AB=a BA± 180°2、闭合导线计算(1)闭合差的计算:f B二刀B测-(n-2 ) X 180°(左、右角) 若f f B容即可以经行角度闭合差的调整。
在平差的过程中。
采用平均分配法把闭合差平均分配到各个观测角, 并遵守短边的夹角多分配,长边的夹角少分配的原则, 使各角改正数的总和与反号的闭合差相等。
改正数计算V B =f B* n (反号)改正后的角值B =B测+V( 2) 坐标方位角的推算:a前=久后+180° - B右(右角)a前=口后-180 - B左(左角)(3)坐标增量计算闭合差计算与改正:△ X=l x Cos a AB △ Y I x Sin a AB (I 是距离)fx= £△ X 测fy= £△ Y 测f= V fx2 + fy 2K=f - L=1 - (L -f)v «容(L 是路线的全长)若K v K容可进行坐标增量闭合差的改正,就是将fx、fy按边长成正比反号分配到各坐标增量上。
反之则重测。
改正数计算:Vx(y)= fx(y)-L x I (反号)改正后坐标增量:△ X后=△ X+Vx △ Y后二A Y+ Vy(4)导线点坐标计算:X=X0+\ X 后Y二Y0+XY 后3、附和导线计算(1)闭合差的计算:f B =刀8测-a终-a始+n x 180°(左角)f B =刀8测-a始-a终+n x 180°(右角)若f f B容即可以经行角度闭合差的调整。
导线复测测量方法与计算
第一篇导线复测一、导线复测的内容当路线线形主要由导线控制时,导线的点位精度及密度直线影响施工放线的质量。
导线测量的内容包括:1、检查导线(网)是否符合规范及有关规定要求,平差计算是否经过有关方面检查与验收。
2、导线点密度是否满足施工放线的要求,必须时应进行加密,以保证在道路施工的全工程中,相邻导线点间能相互通视。
3、检查导线点的是否丢失、移动、并进行必要的点位恢复工作。
二、导线复测的外业导线复测的外业工作主要包括水准测量和距离测量以及导线点的饿加密等。
(一)、水准角的测量导线的水平角测量应使用不低于DJ6 级经纬仪,按测回法进行观测。
在附和导线中采用测量左角和右角,在闭和导线中均测内角。
(二)、导线边长测量导线边长应优先采用光电测距仪测量,无条件时,也可采用钢尺及经纬仪测距,采用测距仪测量导线边长时,距离和竖直角应往返观测一回,距离一测回读数两次,边长采用往测平距,返测平距仅作参考。
(三)、导线测量的技术要求各级主要技术参数表1-1测回数等级导线长度(km)平均边长(km)测角误差(〞)DJ6 DJ2角度闭合差(〞)相对闭合差一级 4 0.5 5 4 2 10 n 1/15000二级 2.4 0.25 8 3 1 16 n 1/10000三级 1.2 0.1 12 2 1 24 n 1/5000(四)、导线加 D2 D1-1原导线不能满足要求时,应进行导线点加密,以保证在道路施工的全过程中,相邻导线间不能通视。
加密的导线点 D1可以采用传统的方法,如线形三角锁、图根导线、交会法等。
然而,随着红 D1-2 (1-1) D1-3外测距仪的广乏使用,特别是全站仪的使用,采用支导线点更为方便。
如图1-1 所示,D1、D2 为已知导线点,待加密点为D1-1、D1-2、……。
现以全站仪支导线为例,简述其导线点加密的一般过程:1、在测站D1 上安置仪器,开机;2、输入测站D1 的坐标、仪器高、棱镜高;3、瞄准后视点D2,输入D2 的坐标或方位角;4、转动望远镜,瞄准待加点D1-1 上的反射棱镜,按下测键,稍后即可得到加密点的坐标。
全站仪导线测量的详细操作方法
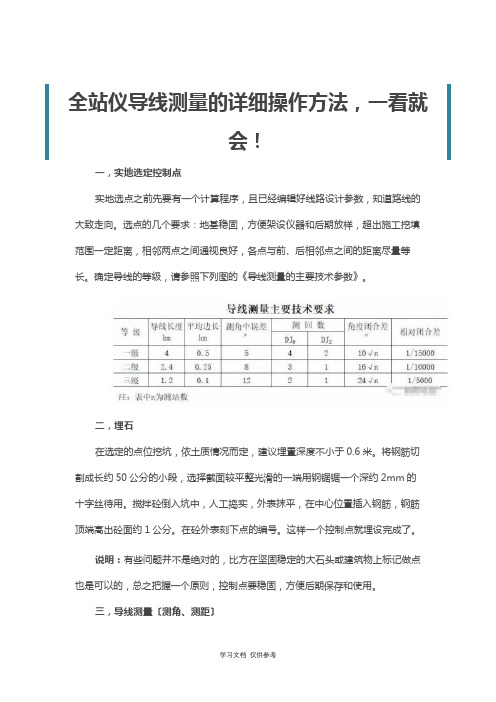
全站仪导线测量的详细操作方法全站仪导线测量的详细操作方法,一看就会!一,实地选定控制点实地选点之前先要有一个计算程序,且已经编辑好线路设计参数,知道路线的大致走向。
选点的几个要求:地基稳固,方便架设仪器和后期放样,超出施工挖填范围一定距离,相邻两点之间通视良好,各点与前、后相邻点之间的距离尽量等长。
确定导线的等级,请参照下图的《导线测量的主要技术参数》。
二,埋石在选定的点位挖坑,依土质情况而定,建议埋置深度不小于0.6米。
将钢筋切割成长约50公分的小段,选择截面较平整光滑的一端用钢锯锯一个深约2mm的十字丝待用。
搅拌砼倒入坑中,人工捣实,表面抹平,在中心位置插入钢筋,钢筋顶端高出砼面约1公分。
在砼表面刻下点的编号。
这样一个控制点就埋设完成了。
说明:有些问题并不是绝对的,比如在坚固稳定的大石头或建筑物上标记做点也是可以的,总之把握一个原则,控制点要稳固,方便后期保存和使用。
三,导线测量(测角、测距)为了方便大家学习和理解,我以一个案例来进行演示。
案例背景G1、G2、G3、G4是设计院给的已知坐标的控制点,D1、D2、D3是我们埋设的待测加密点。
将相邻两点连接后,就组成了导线线路图,如下图:测量方案从G1点向G4点方向测量,测量的水平角为左角。
导线等级采用一级,测量仪器采用2”级全站仪,采用两个相同型号的棱镜。
按技术要求,每个测站需观测两个测回。
开始前的一些常识说明导线边:两个导线点的连线在水平面上的投影叫做导线边,所以导线边长是两相邻点间的水平距离。
水平角:是指两条相邻导线边组成的夹角。
左角和右角:把观测的前进方向的左侧的角叫做左角,右侧的叫做右角,一般都测量左角。
前方点和后方点:前方点和后方点是相对测站点的位置来定的,在相对于测站点的观测前进方向上叫前方点,反之叫后方点。
比如测站在G2点时,G2的后方点是G1,前方点是D1。
盘左和盘右:通俗点说盘左就是常说的正镜,盘右就是常说的倒镜。
全站仪导线测量的详细操作方法
全站仪导线测量的详细操作方法,一看就会!一,实地选定控制点实地选点之前先要有一个计算程序,且已经编辑好线路设计参数,知道路线的大致走向。
选点的几个要求:地基稳固,方便架设仪器和后期放样,超出施工挖填范围一定距离,相邻两点之间通视良好,各点与前、后相邻点之间的距离尽量等长。
确定导线的等级,请参照下列图的《导线测量的主要技术参数》。
二,埋石在选定的点位挖坑,依土质情况而定,建议埋置深度不小于0.6米。
将钢筋切割成长约50公分的小段,选择截面较平整光滑的一端用钢锯锯一个深约2mm的十字丝待用。
搅拌砼倒入坑中,人工捣实,外表抹平,在中心位置插入钢筋,钢筋顶端高出砼面约1公分。
在砼外表刻下点的编号。
这样一个控制点就埋设完成了。
说明:有些问题并不是绝对的,比方在坚固稳定的大石头或建筑物上标记做点也是可以的,总之把握一个原则,控制点要稳固,方便后期保存和使用。
三,导线测量〔测角、测距〕为了方便大家学习和理解,我以一个案例来进行演示。
案例背景G1、G2、G3、G4是设计院给的已知坐标的控制点,D1、D2、D3是我们埋设的待测加密点。
将相邻两点连接后,就组成了导线线路图,如下列图:测量方案从G1点向G4点方向测量,测量的水平角为左角。
导线等级采用一级,测量仪器采用2”级全站仪,采用两个相同型号的棱镜。
按技术要求,每个测站需观测两个测回。
开始前的一些常识说明导线边:两个导线点的连线在水平面上的投影叫做导线边,所以导线边长是两相邻点间的水平距离。
水平角:是指两条相邻导线边组成的夹角。
左角和右角:把观测的前进方向的左侧的角叫做左角,右侧的叫做右角,一般都测量左角。
前方点和后方点:前方点和后方点是相对测站点的位置来定的,在相对于测站点的观测前进方向上叫前方点,反之叫后方点。
比方测站在G2点时,G2的后方点是G1,前方点是D1。
盘左和盘右:通俗点说盘左就是常说的正镜,盘右就是常说的倒镜。
测回:盘左〔正镜〕观测完前方点和后方点的过程叫做上半测回,盘右〔倒镜〕观测完前方点和后方点的过程叫做下半测回。
全站仪测导线方法(水平角法)
全站仪测导线⽅法(⽔平⾓法)测回法适⽤于观测两个⽅向之间的单⾓。
观测⽅法1. 安置仪器:在O点安置仪器,A、B设置⽬标2. 盘左(正镜)观测瞄A,读数a左= 0°01'10",记⼊测回法观测⼿簿顺时针转动照准部,瞄B,读数b左= 147°12'30",记⼊测回法观测⼿簿计算上半测回的⾓值β左=b左- a左= 147°11'20"为上半测回3.倒转望远镜,盘右(倒镜)观测瞄B,读数b右=327°12'55",记⼊测回法观测⼿簿逆时针转动照准部,瞄A,读数a右= 180°01'50",记⼊测回法观测⼿簿计算下半测回⾓值β右= b右- a右= 147°11'05"为下半测回上、下半测回,合称⼀测回4.计算⼀测回的⾓值⽔平⾓(测回法)观测⼿簿(此处缺少⼀个表格!!)5.观测n个测回当测⾓精度要求较⾼时,要进⾏多个测回的观测,为了减少度盘分划误差的影响,根据测回数n,各测回应变换起始⽅向度盘位置。
起始⽅向读数变化按照变换若测回数n=4,则起始⽅向读数分别为0°,45°,90°,135°利⽤复测扳⼿或拨盘⼿轮,安置起始⽅向⽔平度盘读数。
6.限差测回法通常有两项限差,即上、下半测回的⽅向值(⾓值)之差;各测回⽅向值之差;对于不同精度的仪器,有不同的规定限值。
⽅向观测法(全圆测回法)适⽤于观测两个以上的⽅向观测⽅法:1. 安置仪器O点置经纬仪,A、B、C、D设置⽬标。
2. 盘左对零度,瞄A,再顺时针瞄B、C、D、A,第⼆次瞄A称为归零,分别读数,记⼊⼿簿,上半测回。
3. 盘右瞄A、逆时针瞄D、C、B、A,分别读数记⼊⼿簿,下半测回。
4. 上、下半测回,组成⼀测回观测n测回时,起始⽅向读数变化为180°/n。
全站仪测导线方法(水平角法)
测回法适用于观测两个方向之间的单角。
观测方法1. 安置仪器:在O点安置仪器,A、B设置目标2. 盘左(正镜)观测瞄A,读数a左= 0°01'10",记入测回法观测手簿顺时针转动照准部,瞄B,读数b左= 147°12'30",记入测回法观测手簿计算上半测回的角值β左=b左- a左= 147°11'20"为上半测回3.倒转望远镜,盘右(倒镜)观测瞄B,读数b右=327°12'55",记入测回法观测手簿逆时针转动照准部,瞄A,读数a右= 180°01'50",记入测回法观测手簿计算下半测回角值β右= b右- a右= 147°11'05"为下半测回上、下半测回,合称一测回4.计算一测回的角值水平角(测回法)观测手簿(此处缺少一个表格!!)5.观测n个测回当测角精度要求较高时,要进行多个测回的观测,为了减少度盘分划误差的影响,根据测回数n,各测回应变换起始方向度盘位置。
起始方向读数变化按照变换若测回数n=4,则起始方向读数分别为0°,45°,90°,135°利用复测扳手或拨盘手轮,安置起始方向水平度盘读数。
6.限差测回法通常有两项限差,即上、下半测回的方向值(角值)之差;各测回方向值之差;对于不同精度的仪器,有不同的规定限值。
方向观测法(全圆测回法)适用于观测两个以上的方向观测方法:1. 安置仪器O点置经纬仪,A、B、C、D设置目标。
2. 盘左对零度,瞄A,再顺时针瞄B、C、D、A,第二次瞄A称为归零,分别读数,记入手簿,上半测回。
3. 盘右瞄A、逆时针瞄D、C、B、A,分别读数记入手簿,下半测回。
4. 上、下半测回,组成一测回观测n测回时,起始方向读数变化为180°/n。
5.计算*计算两倍照准差(2C)2C=盘左-(盘右±180°)*计算各方向平均值平均读数=[盘左+(盘右±180°)]/2*A方向平均值,填写在括号内*计算归零后的方向值*计算各方向的测回平均值*计算各目标间水平角值6.限差*半测回归零差*上、下半测回同一方向的方向值之差*各测回的方向差根据不同精度的仪器有不同的规定水平角(测回法)观测手簿。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
导线加密复测
1.仪器的校验
测量前应对仪器设备进行校验:检查仪器鉴定证书是否过期,过期严禁使用,注意鉴定证书上的加常数,仪器使用前检查改正;光学对中器检查各个方向是否对中,超过1mm时应调整后使用(调整方法实践中另讲);
2.加密点布设
熟悉现场点位,确定测量路线,对间距大的点加密。
加密点选点原则:视野开阔;便于施工测量;便于保存;距离满足规范要求(200-500m,相邻两点距离不超过2倍);加密点埋设完成后树标志便于测量,避免施工破坏。
3.导线复测及计算
测量准备:全站仪1台,三脚架3个(木脚架1个仪器用,检查连接处是否松动),光学对中器2个,型号一样的镜头2个,对讲机3台,记录本,记录笔及防护用品。
人员配备4人,司仪1人,记录1人,前后视各1人。
测量前对仪器设备检查,清点,仪器电池2块对讲机3台充满电。
测量方法及过程:熟悉现场点位,规划测量路线,分段测量(每段不超过4KM),按标准附合导线测量(从已知两点测至已知两点),第一已知点架三脚架光学对中器为后视,第二已知点架设仪器,按既定路线架三脚架光学对中器为前视,仪器架设完成后(司仪身体不能碰到仪器和脚架,双手调仪器制动除外)检查气象参数,棱镜常数开始测量(旋转仪器要轻柔连贯,司仪站位距脚架距离20cm以上,不得骑在脚架腿上),建站第二已知点,后视第一已知点,测前视点坐标并保存(目的是在平差出错时找到错误)。
开始导线测量,仪器盘左对后视并角度置0o0’0”,报角度后按测距键,再报距离,记录人每听到一个数据先记录再复述,按顺时针旋转仪器对前视,精确对准后报角度,记录,按测距键,报距离,记录,半测回完成,顺时针水平旋转180o,盘右观测前视,观测记录方法同上,逆时针旋转对后视,读书记录,一测回完成,归0差不大于6”(就是归0后读数在359o59’54”至0o0’6”间),记录及现场计算示例如下:
点编号盘左角度盘右角度平均角度盘左距离盘右距离平均距离
后视0o0’0” 180o00’03”
测站
前视190o30’30 10o30’37”
190o30’30” 30’34” 190o30’32”
注:斜体红字为计算值,取位按单进双退原则。
开始第二测回,方法同第一测回,对后视时输任意角度(不要为整数如:90o30’10”,目的是避免读数时凑数),观测记录同第一测回,完成后两测回水平角差不大于6”,超限补测至合格为止,距离超过3mm时补测至合格(角度超限距离合格时可只补测角度,距离超限时补整个测回),合格后依次向前视方向搬站,测第二站,依次类推测至第三四已知点。
3.3 数据整理:一个测段完成后整理数据,示例如下:打开睿智测绘软件(ESDPS),点导线平差附合导线,输入测量数据(输入前可参照左下角工程向导示例文件),输入完成后保存原始数据,点数据处理开始计算,本项目按二级执行。
导线测量的主要技术要求
等级
导线长度(Km)
平均边长(Km)
误差(mm)
测角中误差(″)
测距相对中误差
测回数
方位角闭合差(″)相对闭合差
DJ1
DJ2
DJ6
三等
14
3
≤±20
≤1/150000 6
10
-
≤1/55000四等
9
≤±18
≤±
≤1/80000 4
6
-
5
≤1/35000一级
4
≤±15
≤±5
≤1/30000-
2
4
10
≤1/15000二级
≤±15
≤±8
≤1/14000-
1
3
16
≤1/10000三级
≤±15
≤±12
≤1/7000
-
1
2
24
≤1/5000
计算结果合格报经理部签字认可后方可使用。