一种改善 PMSM 动态性能的弱磁策略
弱磁控制原理与控制方法个人总结

P D F 文件
用 使
" p d f F a c t 试 o r 用 y 本创 P r 建 版 "
P D F 文件
用 使
" p d f F a c t 试 o r 用 y 本创 P r 建 版 "
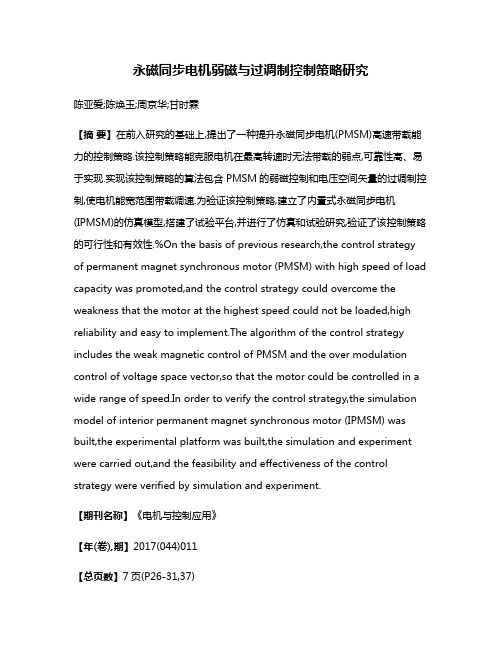
不能超出电流极限圆, 一定要在电压极限椭圆和电流极限圆内。 如 ω = ω 0 时, 电流矢量 i s 的 范围被限制在阴影区域内。
iq
转速增加
B A
A
电流极限圆
ω1
(1-8)
弱磁控制式为满足式(1-7),如图 1-3 所示,通过控制 id 可使逆变器输出功率不变,将电 动机运行范围扩大到高速区域。但在上述两种控制方案中,当电动机转速达到较高转速时, 电机反电势增大, 都将会导致定子端电压大于母线电压, 迫使定子电流跟踪其指令值所需的 电压差减小至 0(甚至为负) ,此时逆变器的 dq 轴电流控制器都会开始饱和,此时 dq 轴电 流控制器输出均是其限幅值从而失去控制,没有达到弱磁控制的目的。因此在实际应用中, PMSM 的弱磁控制主要是在满足电压极限椭圆和电流极限圆的基础上,调整 id 、 iq ,控制 电流矢量轨迹,避免电流调节器饱和,从而使 PMSM 由恒转矩调速平稳、快速地过渡到弱 磁工作模式。
ω2
id
电压极 限椭圆
图 1-1 电压极限椭圆与电流极限圆
1.2. 永磁同步电动机弱磁控制方法理论分析
由式 1-1 可以看出,当电动机电压达到逆变器输出电压的极限时,即 u s=u lim ,如果要 继续升高转速则只能靠调节 id 和 iq 来实现,这就是电动机的“弱磁”运行方式。增加直轴 去磁电流分量 id 和减小交轴电流分量 iq ,以维持电压平衡,从而得到弱磁效果。但是为确 保相电流不超过极限值,应保证弱磁控制时增加 id 的同时必须相应减小 iq 。 下面以隐极电机( Ld = Lq )为例分析 PMSM 的弱磁控制过程。 为了解这一过程,先参照图 1-2 了解什么是最大转矩/电流控制。
永磁同步电机弱磁与过调制控制策略研究
永磁同步电机弱磁与过调制控制策略研究陈亚爱;陈焕玉;周京华;甘时霖【摘要】在前入研究的基础上,提出了一种提升永磁同步电机(PMSM)高速带载能力的控制策略.该控制策略能克服电机在最高转速时无法带载的弱点,可靠性高、易于实现.实现该控制策略的算法包含PMSM的弱磁控制和电压空间矢量的过调制控制,使电机能宽范围带载调速.为验证该控制策略,建立了内置式永磁同步电机(IPMSM)的仿真模型,搭建了试验平台,并进行了仿真和试验研究,验证了该控制策略的可行性和有效性.%On the basis of previous research,the control strategy of permanent magnet synchronous motor (PMSM) with high speed of load capacity was promoted,and the control strategy could overcome the weakness that the motor at the highest speed could not be loaded,high reliability and easy to implement.The algorithm of the control strategy includes the weak magnetic control of PMSM and the over modulation control of voltage space vector,so that the motor could be controlled in a wide range of speed.In order to verify the control strategy,the simulation model of interior permanent magnet synchronous motor (IPMSM) was built,the experimental platform was built,the simulation and experiment were carried out,and the feasibility and effectiveness of the control strategy were verified by simulation and experiment.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)011【总页数】7页(P26-31,37)【关键词】永磁同步电机;弱磁控制;过调制;控制策略;宽范围带载调速【作者】陈亚爱;陈焕玉;周京华;甘时霖【作者单位】北方工业大学电力电子与电气传动工程中心,北京 100144;北京纵横机电技术开发公司,北京 100081;北方工业大学电力电子与电气传动工程中心,北京100144;国家电网北京市电力公司顺义供电公司,北京 101004【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)转子安装方式可分为表贴式和内置式。
一种PMSM弱磁系统模糊-PI复合控制方法

一种PMSM弱磁系统模糊-PI复合控制方法
贾雨庆;江泽;米乾宝
【期刊名称】《微电机》
【年(卷),期】2018(051)002
【摘要】介绍了永磁同步电机(PMSM)基于负id补偿弱磁控制的基本原理.为了提高永磁同步电机弱磁扩速时整个控制系统的抗负载扰动能力,在其弱磁控制系统中的电流环加入了模糊控制器.同时,针对常规模糊控制器消除静差能力较差的问题,引入了一种模糊控制与PI控制复合控制的方法(Fuzzy-PI),即根据输入信号偏差的变化来时时调节二者的权值大小,在偏差较大时增大模糊控制作用权值以加快响应速度,偏差较小时增大PI控制作用权值以消除静差.仿真结果表明,基于模糊-PI复合控制的弱磁控制系统,其抗负载扰动能力强于普通的PI控制.
【总页数】4页(P61-64)
【作者】贾雨庆;江泽;米乾宝
【作者单位】西安航天精密机电研究所,西安710100;西安航天精密机电研究所,西安710100;西安航天精密机电研究所,西安710100
【正文语种】中文
【中图分类】TM341;TM351
【相关文献】
1.一种双模糊PI控制器在PMSM控制系统的研究 [J], 徐奔奔;周芝峰;霍文明;杨恩星
2.内埋式PMSM模糊PI超前角弱磁控制算法研究 [J], 成传柏;陈卫兵;尹康;钟德刚;李德
3.基于Matlab/Simulink的PMSM模糊PI控制方法研究 [J], 荣晓飞
4.永磁同步电机PMSM的模糊PI控制方法 [J], 张榜英;孙炜;黄鹏辉;杨辉媛
5.一种面向电动车IPMSM的基于模糊PI的高性能调速控制方法 [J], 谭琳; 刘平; 崔帅
因版权原因,仅展示原文概要,查看原文内容请购买。
永磁同步电机弱磁控制的控制策略研究

永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用。
本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。
矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。
1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
PMSM超前角弱磁控制的研究

PMSM超前角弱磁控制的研究胡路东;朱高剑【摘要】The whole control system adopts 3 closedloops,namely,current,rotating speed and voltage.Based on the rate of utilization of the voltage on the DC side of the frequency converter by the voltage at the motor side,the AC-DC axis voltage applied to the motor is compared with given voltage value to compose a new voltage control loop which will then form the weakly magnetic advance angle of the motor.The simulation verifies that the weakly magnetic advance angle used can enable smooth transition from the constant torque area with id =0 to weakly magnetic constant power area,and the whole control is practical and feasible.%在整个控制系统中使用了电流、转速和电压的三闭环控制,以电机端电压对变频器直流侧电压的利用率为基础,检测提供给电机的交直轴电压,与给定的电压值相比较组成新的电压控制环,由电压控制环形成电机弱磁的超前角。
通过仿真验证了使用的超前角弱磁可以做到在id =0的恒转矩区平滑的过渡到弱磁控制的恒功率区,整个控制切实可行。
【期刊名称】《电气自动化》【年(卷),期】2014(000)006【总页数】3页(P19-20,45)【关键词】永磁同步电机;超前角;弱磁;控制;仿真【作者】胡路东;朱高剑【作者单位】商丘供电公司,河南商丘 476000;商丘供电公司,河南商丘476000【正文语种】中文【中图分类】TM9210 引言永磁同步电机(permanent magnet synchronous motor,PMSM)的结构简单,具有体积较小、重量轻、效率高、功率因数高等优点,尤其是当永磁同步电机的极对数较多时,电机的转矩增大,转矩密度也增大,这也使电机可以在输出力矩大的同时保持较小的体积,这种优势使得永磁同步电机可以应用到很多对电机的质量体积要求较高的场合,例如航空、机器人等。
PMSM单电流调节器弱磁控制策略研究
PMSM单电流调节器弱磁控制策略研究摘要在PMSM的数学模型基础上,研究了其基于单电流调节器的两种不同弱磁控制方法,即变交轴电压法和电压角度法,分析了其控制原理,可以看出两种控制方法都具有很好的鲁棒性;对其控制原理进行了比较,可知两种控制方法在直轴电压和交轴电压获取方式不同;分别采用以上两种方法对PMSM进行Matlab/Simulink建模与仿真。
结果表明,电压角度法具有更好的带载能力或升速能力,变交轴电压法具有更加平稳的转速波形且电流波形更佳。
关键词单电流调节器变交轴电压电压角度弱磁控制永磁同步电机0 引言随着稀土永磁材料的发展使得永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)逐渐在一些方面取代了上述两种交流电机,永磁同步电机是用永磁体代替电励磁同步电机的转子,使其具有与异步电机相同的结构简单的优点,而同时又兼顾了电励磁同步电机功率因数高、效率高的优点,基于矢量控制的永磁同步电动机以其优良的控制性能、高功率密度和高效率,越来越多地用于各种高性能伺服系统及其它领域。
PMSM基速以下的矢量控制有cosφ=1控制、id=0控制、MTPA控制等,基速以上采用弱磁控制,为的是能够获得更宽的调速范围。
传统的弱磁控制方法中都有两个电流调节器,分别为id和iq调节器,在进行弱磁控制时,由于电机输入电压达到了极限值,随着电机转速的不断升高,使得控制电路中的直轴和交轴电流调节器饱和,相互之间耦合增强,结果导致电机的电流、转矩和转速难以较好地跟踪给定值,电机的动态性能逐渐变差,更有甚者,使整个系统失去稳定,为此,徐隆亚教授和Song Chi博士提出了一种新颖的弱磁控制策略,该策略中保留直轴电流调节器,而弃掉了与之对应的交轴电流调节器,所以称之为单电流调节器控制。
在PMSM单电流调节器控制的发展过程中,又出现了基于单电流调节器弱磁控制的多种控制方法,每一种控制方法都具有各自的优点,对其中的变交轴电压单电流调节器弱磁控制方法(SCR-VQVC)和电压角度单电流调节器弱磁控制方法(SCR-V AC)分别进行分析研究,得到各自的在PMSM弱磁控制中的优缺点,并运用Matlab/Simulink 对其进行了建模与仿真以验证分析结果。
永磁同步电机弱磁最优控制策略研究

永磁同步电机弱磁最优控制策略研究GONG Jinbiao;SHI Huoquan【摘要】针对永磁同步电机(PMSM)在恒转矩区起动能力差、在恒功率区电流轨迹不易跟踪等问题,提出基于电压反馈复合电流前馈的定子电流弱磁最优控制策略.通过判断电流前馈环节达到稳定时所需的电流与采用最大转矩电流比(MTPA)算法所得电流大小,使定子电流在恒转矩区通过电流前馈作用快速跟踪MTPA曲线,加快起动;在恒功率区采用电压反馈复合电流前馈的策略,增强系统抗干扰能力的同时最大化直流母线电压利用率.为了验证该策略的可行性,搭建PMSM仿真模型,构建以dSPACE1007为核心的试验平台,对其进行仿真和试验,结果表明了该策略的稳定性和有效性.【期刊名称】《电机与控制应用》【年(卷),期】2019(046)004【总页数】6页(P32-37)【关键词】永磁同步电机;弱磁控制;最大转矩电流比;电压反馈复合电流前馈【作者】GONG Jinbiao;SHI Huoquan【作者单位】【正文语种】中文【中图分类】TM3410 引言内置式永磁同步电机(IPMSM)因其良好的功率密度和工作效率被广泛应用于各种工业场合[1]。
优化的控制策略通过适当控制电流矢量可以实现电机高利用率。
在基速范围内,最大转矩电流比(MTPA)控制策略可以实现铜耗最小化。
在需要宽速度范围运行的应用,比如电动汽车,在弱磁控制策略中利用永磁体励磁,使电机高速稳定地运行在恒功率区[2]。
对IPMSM进行弱磁区控制策略的研究有重要意义。
在传统IPMSM中,不能直接控制磁通量,只能通过去磁效应减弱气隙磁通量d轴电枢反应电流[3]。
通常采用电流前馈、电压反馈或混合弱磁方法扩展永磁同步电机(PMSM)的运行区域。
电压反馈弱磁控制是通过适当的闭环直接控制逆变器输出电压[4]。
文献[5]通过电压反馈研究不同PMSM控制系统在弱磁控制区域的变化,阐释了弱磁控制特性的参数变化以及转矩限制对弱磁控制的影响。
一种改善PMSM动态性能的弱磁策略

一种改善PMSM动态性能的弱磁策略周华伟;陈龙;刘国海;蒋彦【摘要】针对永磁同步电机(permanent magnet synchronous motors,PMSM)在弱磁区电动工况下运行时动态性能不理想的问题,依据PMSM弱磁理论,研究了dq轴电流调节器对弱磁动态性能的影响,提出一种改善PMSM动态性能的弱磁策略.弱磁电流由q轴电流误差积分器和电压调节器共同作用获得.仿真和实验结果表明该策略抑制了q轴电流调节器的不利影响,改善了PMSM在弱磁区电动工况下的动态性能,同时具有抗积分饱和及弱磁控制的双重功能.【期刊名称】《电机与控制学报》【年(卷),期】2014(018)009【总页数】7页(P23-29)【关键词】永磁同步电机;弱磁控制;动态性能;q轴电流误差积分;抗饱和【作者】周华伟;陈龙;刘国海;蒋彦【作者单位】江苏大学电气信息工程学院,江苏镇江212013;江苏大学汽车工程研究院,江苏镇江212013;江苏大学汽车工程研究院,江苏镇江212013;江苏大学电气信息工程学院,江苏镇江212013;江苏大学电气信息工程学院,江苏镇江212013【正文语种】中文【中图分类】TM301.20 引言永磁同步电机(permanent magnet synchronous motors,PMSM)以其高效率、高功率密度和高转矩/惯量比特性在轨道交通、电力牵引传动系统、电动汽车等要求较高的调速驱动系统中得到了广泛的应用[1]。
弱磁控制能够在电压源逆变器(voltage source inverter,VSI)不增加容量的同时使电机在高速时恒功率输出,拓宽了电机调速范围。
反电势在电机端电压中占的比重很大,和转速成比例,但电机运行在弱磁模式时,端电压受VSI供电电压的限制。
因此最简单的弱磁策略是改变电机转子磁链使转子磁链与转速成反比,但这一方面牺牲了电机输出转矩的能力,更主要的是由于PMSM的转子磁场由永磁体产生,不能直接被减弱,其弱磁控制是利用直轴电枢反应使电机气隙磁场减弱,达到等效减弱磁场的效果[2],从而满足宽转速范围的调速要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
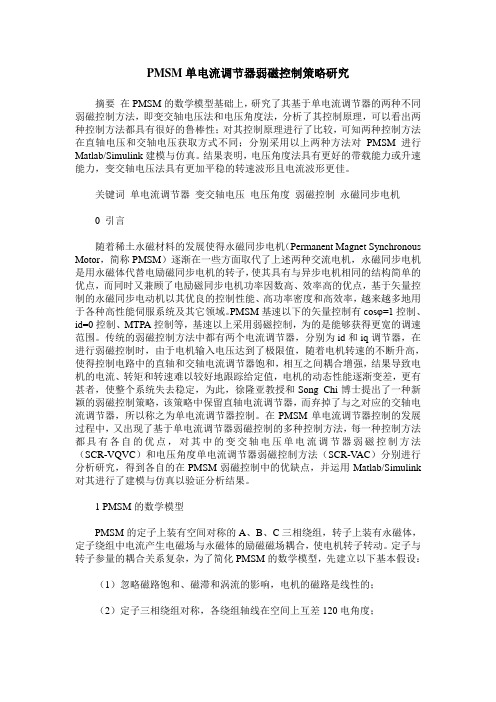
Voltage and current constraints of PMSM
电机工作点位于电流圆和最大转 转速较低时, MTPA) 线的交 矩 / 电流( maximum torque per ampere, 点( 图 1 的 A 点) , 此时电机输出转矩最大。 随着转 速升高, 电压椭圆向 C 点收缩, 而 C 点位于 MTPA 线的左边, 因此转速越高要求 d 轴电流 i d 越偏负。 实现 i d 负向增加的策略在工程中常采用如图 2 所
2 2 2 i2 d + i q = i s ≤ I smax , 2 d 2 q 2 s 2 lim
( 2)
单电流调节器
[7 ]
( 3) u + u = u ≤u 。 将式( 1 ) 代入式 ( 3 ) , 则电压限制转化为电流 限制 ( Ld id + ψf ) 2 + ( Lq iq ) 2 = u lim 2 。 ( 4) ω 在 i d - i q 坐标平面, 式 ( 2 ) 表示为 如图 1 所示, 0 ) 为圆心的圆, 一个以坐标 O( 0 , 称为电流限制圆; 式( 4 ) 表 示 为 一 个 以 坐 标 C - 圆, 称为电压限制椭圆。
( 1. School of Electrical and Information Engineering,Jiangsu University,Zhenjiang 212013 ,China; 2. Automotive Engineering Research Institute,Jiangsu University,Zhenjiang 212013 ,China)
24
电
机
与
控
制
学
报
第 18 卷
运行在弱磁模式时, 端电压受 VSI 供电电压的限制。 因此最简单的弱磁策略是改变电机转子磁链使转子 磁链与转速成反比, 但这一方面牺牲了电机输出转 矩的能力, 更主要的是由于 PMSM 的转子磁场由永 磁体产生, 不能直接被减弱, 其弱磁控制是利用直轴 电枢反应使电机气隙磁场减弱, 达到等效减弱磁场 [2 ] 的效果 , 从而满足宽转速范围的调速要求 。 、 弱磁前馈控制策略 根据电压 限制椭圆以及电机参数求出 d 轴电流, 具有良好的 动态性能; 但计算量大, 参数鲁棒性差。 [4 ] q 基于 轴电压调制的 d 轴电流补偿弱磁策略 但从电压差值到 d 轴补 具有良好的弱磁动态性能, 偿电流转换的增益与感抗相关。使用过调制模块输 入和输出电压的差值计算反馈磁链, 通过前馈磁链 和反馈磁链相减实现抗饱和以及弱磁控制双重功能 [5 - 6 ] , 的策略 其前馈磁链需查表获得, 制定表格需大 量的实验, 另从电压偏差到反馈磁链转换的增益需 通过反复试验确定。 利用系统弱磁后 q 轴电压受 VSI 最大输出电压的限制, 通过控制 d 轴电流间接 控制 q 轴电流的思想实现了深度弱磁。为避免确定 q 轴电压的困难, 8] 文献[ 将电压角引入了单电流调 d 轴电流误差经 PI 直接获得电压矢量角。 尽 节器, 管它们具有良好的扩速性能, 但动态性能不理想。 根据调节器抗饱和的思想, 为避免调节器饱和, [9 ] 基于电压反馈的弱磁策略 采用 dq 轴电流调节器 输出电压指令和 VSI 输出电压的极限值的差值经电 压调节器获得 d 轴弱磁电流。其电压环直接决定着 弱磁点和弱磁程度, 无需检测母线电压, 最大限度地 利用了母线电压, 具有优良的稳态性能和较强的鲁 棒性。由于工作于电压饱和区附近, 且需要经两个 调节器( 电流调节器、 电压调节器 ) 才能获得弱磁电 流, 转矩阶跃时系统瞬态响应性能不理想 , 甚至会引 起较大的转矩脉动。采用 VSI 开关周期和电压矢量 有效作用时间之和的差值经 PI 获得 d 轴补偿电流 的弱磁策略
在恒转矩区, 电机端电压小于 VSI 输出电压极 VSI 和电流调节器均有电压余量能保证电 限值 u lim , 流跟随指令, 系统电压指令和 VSI 实际输出电压偏 差为零; 但在弱磁区, 电机端电压达到 VSI 输出的 VSI 输出电压饱和, u lim , 若不采取措施系统电压指
u* q
* u* u q 将出现偏差。 令 ud 、 q 和 VSI 实际输出电压 u d 、
第9 期
周华伟等: 一种改善 PMSM 动态性能的弱磁策略 需考虑 q 轴电流调节器对弱磁的影响。 2. 2 弱磁控制策略的提出
25
示的基于电压反馈的弱磁策略。 对 i d 限幅的目的 是为了防止电流限制圆与电压限制椭圆无交点 , 引 起电流失控
[14 ]
。
驻id0 驻 id PI Udc%/ 姨 3 i* d% i* q id iq PI PI Us
0
引
言
车等要求较高的调速驱动系统中得到了广泛的应 [1 ] 用 。弱 磁 控 制 能 够 在 电 压 源 逆 变 器 ( voltage source inverter,VSI) 不增加容量的同时使电机在高 速时恒功率输出, 拓宽了电机调速范围。 反电势在 电机端电压中占的比重很大, 和转速成比例, 但电机
永磁 同 步 电 机 ( permanent magnet synchronous motors,PMSM) 以其高效率、 高功率密度和高转矩 / 惯量比特性在轨道交通、 电力牵引传动系统、 电动汽
收稿日期: 2013 - 08 - 19 基金项目: 江苏大学高级专业人才科研启动基金( 12JDG109 ) ; 国家自然科 学 基金 ( 51077066 ) ; 江苏 省 高 校优势 学 科建设 工 程资助项目 ( 苏 政 〔2011 〕 6 号) 办发 作者简介: 周华伟( 1980 —) , 讲师, 研究方向为永磁同步电机驱动控制; 男, 博士, 陈 龙( 1958 —) , 教授, 博士生导师, 研究方向为新能源车辆动态性能模拟和驱动控制; 男, 博士, 刘国海( 1964 —) , 教授, 博士生导师, 研究方向为电气传动及其自动化; 男, 博士, 蒋 彦( 1981 —) , 讲师, 研究方向为永磁同步电机调速控制。 女, 博士生, 通讯作者: 周华伟
态电压方程
为 u d = - ωL q i q ,
u q = ωL d i d + ωψ f 。
}
( 1)
q 轴电感、 Lq 、 id 、 iq 、 ud 、 u q 分别为 d、 式中: L d 、 电流、 电压; ψ f 为永磁磁链; ω 为电角速度。 PMSM 运行时相电压幅值 由于采用 VSI 供电, us 、 即电 定子相电流幅值 i s 受限于 VSI 的输出能力, 流 最 大 值 I smax 和 与 母 线 电 压 U dc 相 关 的 电 压 u lim = U dc 的限制, 因此需满足 3 槡
第 18 卷
第9 期
2014 年 9 月
电 机 与 控 制 学 报 Electri c Machines and Control
Vol. 18 No. 9 Sep. 2014
一种改善 PMSM 动态性能的弱磁策略
1, 2 2 1 1 周华伟 , 陈龙 , 刘国海 , 蒋彦
( 1. 江苏大学 电气信息工程学院,江苏 镇江 212013 ; 2. 江苏大学 汽车工程研究院,江苏 镇江 212013 )
中图分类号: TM 301. 2 文献标志码: A 文章编号: 1007- 449X( 2014 ) 09- 0023- 07
Fluxweakening strategy for improving PMSM dynamic performance
2 ZHOU Huawei1, , CHEN Long2 , LIU Guohai1 , JIANG Yan1
iq MTPA MTPV B id C O A T1 T2
( ) )
(
ψf , 0 为圆心的椭 Ld
电流限制圆 电压限制椭圆
, 转矩动态性能也不理想。 采用 q
[12 ]
轴电流误差经 PI 获得电流超前角的弱磁策略 态性能不理想。
稳
Fig. 1
图1
PMSM 的电气约束
PMSM 矢量控制策略采用电流环控制, 在调节 器和 VSI 输出电压没有饱和时, 电流误差很小甚至 , 为零 只有饱和时才会产生较大的误差。 因此只有 抑制调节器和逆变器饱和才能使电流跟随性能好 , 只有电流跟随好, 才能保证电机在弱磁区的稳态性 能和动态性能。 本文针对凸极 PMSM 在弱磁区电 动工况下动态性能不好的现象, 在对其它弱磁策略
Fluxweakening control block diagram based on feedback voltage
* * Δu q = u q - u q = u q - ωL d i d - ωψ f 。
[10 - 11 ]
分析研究的基础上, 提出一种改进 PMSM 弱磁动态 性能的策略, 且将其与基于电压反馈的弱磁策略在 一台额定功率为 20kW 的凸极 PMSM 上进行了仿真 和实验对比分析。
1
永磁同步电机弱磁理论
PMSM 在 dq 坐标系上的稳 忽略定子电阻压降,
[13 ]
梯度下降法
[பைடு நூலகம் ]
[3 ]
姨u d%% +u q%%
u* d
*2
*2
MTPA
* idc
i** d%%%
i* s
( i ) 姨i + i sgn
* s
*2 s%%
*2 d%%
Δu q 为 稳态时 dq 轴电压偏差 Δu d 、
* * Δu d = u d - u d = u d + ωL q i q ,
图2 Fig. 2
基于电压反馈的弱磁控制框图
Abstract : The dynamic performance of permanent magnet synchronous motors ( PMSM) in fluxweakening operation is not good. To solve the problem,by analyzing the affection of dqaxis current regulators to the PMSM dynamic performance ,a fluxweakening strategy for improving PMSM dynamic performance was proposed. The fluxweakening current was obtained by the interaction of qaxis current error integrator and voltage regulator. The simulation and experimental results demonstrate that the negative effect of qaxis current regulator is restrained ,the PMSM dynamic performance in fluxweakening operation is improved ,and the proposed strategy has the antiwindup and fluxweakening function. Key words: permanent magnet synchronous motors; fluxweakening control; dynamic performance ; qaxis current error integral; antiwindup