推靠式旋转导向井眼轨迹预测与控制方法_巩宪锋
静态推靠式旋转导向控制方案分析及优化

静态推靠式旋转导向控制方案分析及优化李士斌;王业强;张立刚;徐月庆【摘要】旋转导向钻井技术已经成为当前钻井必不可少的核心技术,主要根据静态推靠式旋转导向控制原理,结合工程实际要求,建立力学模型。
根据有利区内支撑爪力最大、不利区内支撑爪力最小原则,提出120°和60°划分区域的2种控制方案,在优化数学模型的基础上,分别将各支撑爪的应力分解到偏置合力的方向和垂直于偏置合力的方向,采用力学矢量分析法,建立不同偏置合力矢量下的力学方程,求解相应的方程,得出不同划分区域下各支撑爪的应力表达式。
分析对比不同划分区域下各支撑爪应力变化,比较变化趋势,优选更为稳定的控制方案,从而增加仪器使用寿命,减少钻井事故,降低成本。
%The rotary steering drilling technique has become an indispensable core technology in the present drilling operations. In this paper, a mechanical model was built according to the principle of static push-the-bit rotary steering control and in conjunction with the actual need of drilling engineering. According to the principle of maximum supporting claw force in the favorable area and minimum supporting claw force in the unfavorable force, this paper presents two control schemes: dividing the area by 120° and 60°. While optimizing the mathematical model, the stress on each supporting claw is decomposed to the bias resultant force direction and to the direction perpendicular to the bias resultant force. Using mechanics vector analytic method, a mechanic equation is built under different bias resultant vector, and then solves the related equation to ifnd the stress expressions of each supporting claw at different areas. This paper analyzes the stress changesof each supporting claw at different areas, compares the changing trend and optimizes the more steady control scheme so as to increase the service life of the instruments, reduce drilling accidents and reduce drilling costs.【期刊名称】《石油钻采工艺》【年(卷),期】2015(000)004【总页数】4页(P12-15)【关键词】旋转导向钻井;推靠式旋转导向;控制方案;变化趋势【作者】李士斌;王业强;张立刚;徐月庆【作者单位】东北石油大学石油工程学院,黑龙江大庆 163318;东北石油大学石油工程学院,黑龙江大庆 163318;东北石油大学石油工程学院,黑龙江大庆163318;大庆钻井工程技术研究院,黑龙江大庆 163318【正文语种】中文【中图分类】TP13;TE928旋转导向钻井技术使得钻进速度和钻井质量得到大幅度的提升,国外对旋转导向技术的研究比较成熟,其中已经商业化应用的旋转导向钻具中,其控制方案、导向方式和整体结构各不相同,然而国内对旋转导向系统的研究仍处于初级阶段,目前阶段对推靠式工作方式研究较多。
导向钻井在井眼轨迹控制中的应用
导向钻井在井眼轨迹控制中的应用摘要由随钻测量系统、导向马达系统和优质高效钻头构成的导向钻井系统的开发和应用,实现了大斜度井井眼轨迹控制过程中定向、增斜、稳斜、调整井斜和方位等的连续作业,并随钻监测,随时调整钻井参数和钻井方式。
从数学和力学的角度,对导向钻具组合进行变形分析,进一步求出结构参数、工艺参数以及井身参数对钻头侧向力和工具造斜能力的影响,从而实现导向钻具的优化设计。
主题词导向钻井大斜度井井眼轨迹控制1.前言导向钻井技术是一项较先进的井眼轨迹控制技术。
随着石油勘探和开发的发展,钻井技术也有了进一步的发展。
从常规定向井与丛式井到大斜度井与水平井,井眼轨道的井斜角越来越大,造斜井段和大斜度稳斜井段越来越长,钻具重力由有利于钻进的因素变成了不利于钻进的因素,如摩阻增大,容易出现键槽;钻井液中固相析出趋势增大;施加钻压和仪器入井困难;卡钻和其它井下事故增加等。
这就要求大斜度井井身设计、井眼轨道控制和钻井液等各个环节与常规定向井不同。
导向钻井系统的开发和应用,解决了大斜度井井眼轨道控制过程中的一些难题,实现了定向、增斜、稳斜、调整井斜和调整方位等的连续作业,随钻监测实钻井眼轨迹的井斜、方位、工具面,跟踪计算和跟踪作图,随时预测井眼发展趋势,及时调整钻井参数和钻井方式,满足了井眼轨迹控制的要求。
2导向钻井技术2.1导向钻井技术的优点(1)井眼轨迹控制精度高:导向钻井系统可以做到及时测量,在井下可完成包括造斜、增斜、稳斜、降斜和扭方位等各项施工。
一是实际井眼轨迹与设计轨迹吻合良好,中靶精度高;二是稳斜、稳方位效果好,在稳斜段可以小井段定向调整.井眼轨迹圆滑。
(2)钻井速度提高明显:导向钻井系统由钻头、单弯螺杆作为下部钻具组合,在一般井滑动定向时,钻速和常规的转盘钻井方式相当,而复合钻井时,其钻速可以大幅度提高,达到常规钻井方法的2倍以上。
导向钻井技术控制井眼轨迹精度高,不要更换钻具。
(3)井下安全性增强:水平井、大斜度井.由于井斜大,在井眼中易形成“岩屑床”,不易被钻井液带出,摩阻增大;同时位移大,大段的钻具躺在下井壁,井下摩阻大,钻具扭矩大。
静态推靠式旋转导向的导向力变化规律模拟研究
控更合适。
基于静态推靠式旋转导向系统的结构及工作原理,通过模拟实验模拟研究静态推靠式旋转导向钻井工具的两种调控模式,为下一步优选调控模式和提高调控精度提供技术支持。
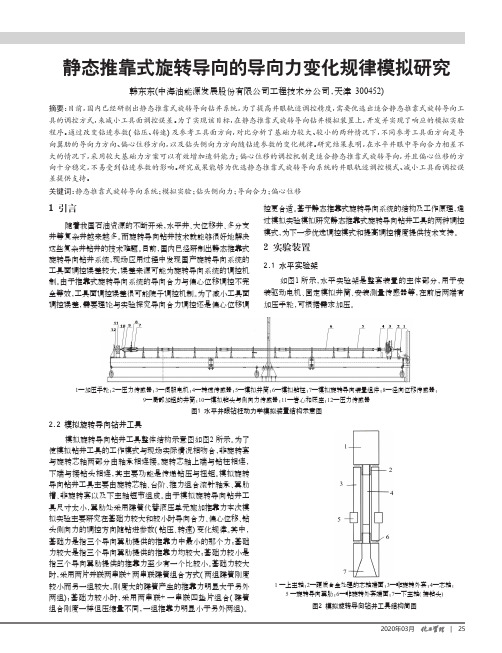
2 实验装置2.1 水平实验架如图1所示,水平实验架是整套装置的主体部分,用于安装驱动电机、固定模拟井筒、安装测量传感器等,在前后两端有加压手轮,可根据需求加压。
1 引言随着我国石油资源的不断开采,水平井、大位移井、多分支井等复杂井越来越多。
而旋转导向钻井技术就能够很好地解决这些复杂井钻井的技术难题。
目前,国内已经研制出静态推靠式旋转导向钻井系统,现场应用过程中发现国产旋转导向系统的工具面调控误差较大,误差来源可能为旋转导向系统的调控机制。
由于推靠式旋转导向系统的导向合力与偏心位移调控不完全等效,工具面调控误差很可能院子调控机制。
为了减小工具面调控误差,需要理论与实验探究导向合力调控还是偏心位移调静态推靠式旋转导向的导向力变化规律模拟研究韩东东(中海油能源发展股份有限公司工程技术分公司,天津 300452)摘要:目前,国内已经研制出静态推靠式旋转导向钻井系统,为了提高井眼轨迹调控精度,需要优选出适合静态推靠式旋转导向工具的调控方式,来减小工具面调控误差。
为了实现该目标,在静态推靠式旋转导向钻井模拟装置上,开发并实现了响应的模拟实验程序。
通过改变钻进参数(钻压、转速)及参考工具面方向,对比分析了基础力较大、较小的两种情况下,不同参考工具面方向是导向翼肋的导向力方向、偏心位移方向,以及钻头侧向力方向随钻进参数的变化规律。
研究结果表明,在水平井眼中导向合力相差不大的情况下,采用较大基础力方案可以有效增加造斜能力;偏心位移的调控机制更适合静态推靠式旋转导向,并且偏心位移的方向十分稳定,不易受到钻进参数的影响。
研究成果能够为优选静态推靠式旋转导向系统的井眼轨迹调控模式、减小工具面调控误差提供支持。
关键词:静态推靠式旋转导向系统;模拟实验;钻头侧向力;导向合力;偏心位移1—加压手轮;2—压力传感器;3—伺服电机;4—转速传感器;5—模拟井筒;6—模拟钻柱;7—模拟旋转导向装置组件;8—径向位移传感器;9—局部加粗的井筒;10—模拟钻头与侧向力传感器;11—岩心和底座;12—压力传感器图1 水平井眼钻柱动力学模拟装置结构示意图1 —上主轴;2—硬质合金处理的芯轴端面;3—非旋转外套;4—芯轴;5 —旋转导向翼肋;6—非旋转外套端面;7—下主轴(接钻头)图2 模拟旋转导向钻井工具结构简图2.2 模拟旋转导向钻井工具模拟旋转导向钻井工具整体结构示意图如图2所示。
推靠式旋转导向工具造斜能力影响因素

推靠式旋转导向工具造斜能力影响因素李军; 李东春; 张辉; 王昊【期刊名称】《《石油钻采工艺》》【年(卷),期】2019(041)004【总页数】7页(P460-466)【关键词】推靠式旋转导向工具; 力学模型; 底部钻具组合; 造斜能力【作者】李军; 李东春; 张辉; 王昊【作者单位】中国石油大学 (北京) 石油工程学院【正文语种】中文【中图分类】TE243旋转导向工具钻进时,钻柱始终处于旋转状态,因此相比于滑动导向工具具有机械钻速快、摩阻扭矩小、水平位移延伸能力强、井眼轨迹易调控等优点,适用于超深井、大位移水平井、丛式井等复杂结构井的导向钻进。
旋转导向工具可分为推靠式和指向式[1],其中推靠式旋转导向工具进入国内市场较早,在国内海上以及陆上部分油田的总体应用情况较好,显著降低了摩阻扭矩、提高了机械钻速[2-5]。
但在塔中地区部分超深水平井的钻进中出现了推靠式旋转导向工具造斜能力不足的问题,因此有必要对影响推靠式旋转导向工具造斜能力的因素进行分析研究,以达到为现场施工提供技术指导的目的。
国外很多学者根据偏置机构的位移采用几何法分析推靠式旋转导向工具的理论造斜率[6-7],国内部分学者通过纵横弯曲梁方法建立了静力学模型来分析推靠式旋转导向工具的变斜力和变方位力[8-10]。
这些模型及分析多数没有考虑地层性质对工具造斜能力的影响。
笔者建立了推靠式旋转导向工具变截面BHA 力学模型以及井斜趋势角分析模型,在此基础上分析了BHA 结构参数、钻压、钻头各向异性和岩石可钻性对工具造斜能力的影响规律。
1 推靠式旋转导向工具变截面BHA 力学模型推靠式旋转导向工具主要通过工具外筒上偏置机构中的推靠块推靠井壁,在钻头处获得一个额外的侧向力,从而控制井眼轨迹的走向。
推靠式旋转导向工具的底部钻具组合中,偏置机构一般安放在靠近钻头的位置,其后面串接2 个或2 个以上的稳定器,通常还会在中间加一根柔性短节。
建立推靠式旋转导向工具的BHA 力学模型,如图1 所示。
一种井眼轨迹控制质量整体评估与预测摩阻扭矩修正方法

一种井眼轨迹控制质量整体评估与预测摩阻扭矩修正方法艾飞
【期刊名称】《中国石油大学胜利学院学报》
【年(卷),期】2022(36)4
【摘要】提出一种井眼轨迹控制质量整体评估方法,用于修正钻前预测摩阻扭矩,以实现钻井施工难度合理评估。
分析实钻井眼轨迹与设计井眼轨道的空间几何关系,提出局部井段空间最近距离扭转行程波动幅度和扭转角度的概念,分别以距离波动幅度和近似扭转角为评估标准,建立基于空间最近距离扭转行程波动幅度的局部和全井段相似性评估模型。
实例研究分析大斜度井实钻井眼轨迹相对于设计井眼轨道的局部和全井段相似性系数变化规律,并计算实钻井眼轨迹摩阻相对于设计井眼轨道的偏差,提出钻前预测摩阻扭矩的修正方法,为钻前合理预测摩阻扭矩提供一种技术手段。
【总页数】7页(P77-83)
【作者】艾飞
【作者单位】中海石油(中国)有限公司深圳分公司
【正文语种】中文
【中图分类】TE132
【相关文献】
1.小井眼长水平段水平井摩阻扭矩控制技术
2.新钻井技术钻出光滑的连续井眼降低了扭矩和摩阻
3.拟悬链线轨迹设计方法及其摩阻扭矩评价
4.二维井眼轨迹摩阻扭矩的影响因素分析
5.大斜度长稳斜井段钻井摩阻/扭矩分析、预测与控制
因版权原因,仅展示原文概要,查看原文内容请购买。
静态推靠式旋转导向控制模型与造斜率预测方法

第 51 卷 第 4 期石 油 钻 探 技 术Vol. 51 No.4 2023 年 7 月PETROLEUM DRILLING TECHNIQUES Jul., 2023doi:10.11911/syztjs.2023077引用格式:秦永和,范永涛,陈文辉,等. 静态推靠式旋转导向控制模型与造斜率预测方法[J]. 石油钻探技术,2023, 51(4):74-80.QIN Yonghe, FAN Yongtao, CHEN Wenhui, et al. Static push-the-bit rotary steering control model and build-up rate prediction method [J].Petroleum Drilling Techniques,2023, 51(4):74-80.静态推靠式旋转导向控制模型与造斜率预测方法秦永和1, 范永涛2, 陈文辉2, 刘 越2, 李晓军2, 王 舸3(1. 中国石油天然气集团有限公司, 北京 100010;2. 中国石油集团测井有限公司, 陕西西安 710054;3. 石油工程教育部重点实验室(中国石油大学(北京)), 北京 102249)摘 要: 推靠式旋转导向工具的防斜、稳斜能力强,能基本满足复杂地层安全高效钻进的需要,但目前的造斜率预测方法没有考虑推靠块控制方式及钻进过程的影响,存在造斜率预测精度低的问题。
为此,考虑导向工具的结构特性,建立了静态推靠式旋转导向控制模型,给出了可靠的导向力控制方案,利用下部钻具组合力学模型及钻头–地层相互作用模型,得到了基于零侧向钻速条件下的造斜率预测模型,并引入折算系数对造斜率预测结果进行了修正。
实例计算及敏感性分析结果表明,该方法预测精度高,能够满足井眼轨迹精确控制的需要;导向合力、钻压、钻头与稳定器的距离对推靠式旋转导向工具的造斜能力影响显著,现场施工时为了充分发挥导向合力的作用,要适当减小钻头与稳定器的距离、降低钻压,以提高旋转导向工具的造斜能力。
石油工程技术 旋转导向工具发展概述
旋转导向工具发展概述本文对我国在井眼轨迹控制技术方面取得的进展进行了总结,重点在导向结构、实现功能和应用推广方面做了分析;在总结国外旋转导向工具技术并结合机械工程的新材料新技术发展基础上,提出井眼轨迹控制工具将向复合式工具技术的方向发展,其中工具的心轴、轴承的材料和结构以及工具的智能化研究将是未来的发展方向,而恶劣环境下的井下钻井机器人将是研究的最终目标。
一、国内旋转导向工具发展现状近年来,国内也在积极进行井眼轨迹控制工具即旋转导向技术的研究工作,并在理论研究和原理样机方面取得了较多的研究成果,但距离工业规模化应用还有一定距离。
二、推靠式旋转导向工具目前,国内的动态推靠式旋转导向工具主要以调制式旋转导向工具为主,西安石油大学与中石化胜利钻井工艺研究院合作,研发了调制式旋转导向钻井工具MRST。
整个工具配备了以钻井液为液压介质的液压系统,工具内有上、下涡轮发电机驱动的稳定平台。
该平台在下部电机的电气参数调控作用下,可以在高速旋转工具外壳内独立旋转,调节液压盘阀钻井液分流系统的上盘阀位置,对钻井液分流,在工具内外压差作用下推动翼肋伸缩产生偏置。
工具原理结构如图1所示。
1—上轴承保护器;2—测控稳定平台;3—下轴承保护器;4—液压盘阀分流系统;5—偏置单元;6—钻井液过滤装置;7—下涡轮发电机;8—上涡轮发电机。
图1动态推靠式工具原理结构图国内典型的静态推靠式旋转导向工具主要由驱动轴、不旋转外套、导向机构和密封系统等构成,其中导向机构由可独立伸出或缩回的翼肋和液压缸组成,翼肋在液压缸的作用下产生推靠力。
国内企业或研究单位在该类工具的研发中投入较多,如:中海油研发出了自主的静态推靠式旋转导向钻井系统Welleader,能够实现井斜自动闭环控制,导向力可以实现32级强度和240级方向控制,最大转速180r/min,工具耐温达150℃。
该工具已在渤海湾完成了试验工作,具备了海上作业的能力,实钻造斜率约每30m井段造斜6.5°,但是仍处于初步应用阶段。
推靠式旋转导向井眼轨迹预测与控制方法
推靠式旋转导向井眼轨迹预测与控制方法巩宪锋;黄翔宇【摘要】旋转导向钻井系统是现代导向钻井技术的发展方向。
通过导向机构调节导向参数来预测和控制井眼轨迹,是旋转导向钻井系统的关键技术之一。
为解决推靠式旋转导向钻具的导向力和工具面角对井眼轨道的控制问题,对导向力分别在井斜平面和方位平面进行解耦;并应用了纵横弯曲理论建立了底部钻具组合三维力学分析模型,得出了导向参数与钻头侧向力和转角的定量关系。
在考虑钻头和地层的各向异性因素的影响下,利用在UPC模型基础上提出的有效钻力的概念,通过计算钻头有效钻力来预测实钻过程中的钻进趋势。
在此理论基础上,计算了按设计的井眼轨道钻进所需要的导向参数,并讨论了井眼轨迹参数、钻压、钻头各向异性参数和地层参数对钻具导向性能的影响;分析了其中的规律,并得出只有综合考虑上述各项因素,才能准确计算出导向参数,确保钻头沿设计轨迹钻进,也为旋转导向井眼轨迹控制提供了理论依据。
%Rotary steerable system is the development direction of modern steering drilling techniques, it is one of the key technologies of the rotary steerable drilling system by adjusting the steering parameters to predict and con-trol the well trajectory. To solve the problem of well trajectory control by adjusting steering force and tool face angle for push the bit RSS, the steering force is decoupled in deviation plane and azimuth plane, the 3D mechanical anal-ysis of the bottom borehole assembly is carried out with the beam-column theory, the quantitative relationship be-tween the steering parameters and bit side force and angle is obtained. In consideration of the anisotropy of the drill bit and formation, the effective drilling force which is based on the UPCmodel can be used to predict the drilling tendency. Based on the theoretical research above, the steering parameters required can be calculated according to the designed wellbore trajectory. we discuss the influence of borehole trajectory, drilling pressure, and the bit ani-sotropy index and formation parameters on the deflecting characteristics of RSS, and conclude that only consider the above factors can we accurately calculate the steering parameters, which can also provide the theoretical basis for the control of the trajectory.【期刊名称】《科学技术与工程》【年(卷),期】2016(016)018【总页数】5页(P20-24)【关键词】旋转导向系统;导向参数;力学分析;有效钻力;导向性能【作者】巩宪锋;黄翔宇【作者单位】北京科技大学机械工程学院,北京100083;北京科技大学机械工程学院,北京100083【正文语种】中文【中图分类】TE21旋转导向钻井系统(rotary steerable system,RSS)被誉为是定向钻井技术一场革命,由于其摩阻与扭矩小、井眼净化效果好、位移延伸能力强、适用于高难度井和特殊油藏等诸多优点,因此被认为是现代导向钻井技术的发展方向[1]。
推靠式旋转导向钻井工具导向能力测试系统
推靠式旋转导向钻井工具导向能力测试系统刘庆龙【摘要】Basing on both strain analysis and finite element analysis of the guide ribs-assisted well bore , the strain sensor ’ s optimal distribution was simulated and the steering ability testing system for backup rotary steering drilling tools was designed , including its hardware configuration and the working process of the soft-ware.%基于导向翼肋作用下模拟井筒应变的分析和导向翼肋作用下模拟井筒的有限元分析,模拟井筒应变传感器的优化布局,设计具有自主知识产权的推靠式旋转导向钻井工具导向能力测试系统,并给出其硬件组成与软件工作流程。
【期刊名称】《化工自动化及仪表》【年(卷),期】2014(000)005【总页数】6页(P575-579,586)【关键词】钻井工具;导向力测试;硬件;软件【作者】刘庆龙【作者单位】中国石油大学石油工程学院,山东青岛 266555; 中石化胜利石油工程公司钻井工艺研究院,山东东营257017【正文语种】中文【中图分类】TH89旋转导向钻井技术是以旋转导向钻井工具为核心的钻井新技术,通过实时控制钻井轨迹,命中最佳地质目标,具有机械钻速高、井身轨迹控制精度高、井眼净化效果好及位移延伸能力强等特点[1]。
该技术在老油田后期开发、提高采收率,以及油层薄、形状特殊的难采油藏具有显著优势。
目前,旋转导向钻井技术仍处于快速发展阶段,哈里伯顿及斯伦贝谢等国外钻井服务公司分别推出了各自的旋转导向工具,取得了巨大的经济效益,垄断了国内外市场。
静态推靠式旋转导向控制指令算法
静态推靠式旋转导向控制指令算法王业强;李士斌;张立刚;李闯;邢恩浩;官兵【期刊名称】《断块油气田》【年(卷),期】2016(023)002【摘要】旋转导向钻井系统代表了当今最高水平的定向钻进技术,而我国对该项技术的研究仍处于初级阶段,急需对该技术进行深入研究以静态推靠式旋转导向工具为研究对象,根据其内部结构及导向工作原理,寻求针对该类型导向工具的控制指令算法采用平面圆弧曲线假设法确定可钻达目标点的待钻井段,通过分析该井段的井斜角、井斜方位角及全角变化率,得到可实现按目标方向钻进的控制指令算法,同时将该算法编入导向工具地面控制系统.实验结果表明,该控制算法可根据轨迹要求,准确求出控制指令,实现导向功能.最后做出静态推靠式旋转导向工具的双向闭环控制图,并加以说明,以供科研人员参考.【总页数】4页(P261-264)【作者】王业强;李士斌;张立刚;李闯;邢恩浩;官兵【作者单位】东北石油大学石油工程学院,黑龙江大庆163318;东北石油大学石油工程学院,黑龙江大庆163318;东北石油大学石油工程学院,黑龙江大庆163318;东北石油大学石油工程学院,黑龙江大庆163318;东北石油大学石油工程学院,黑龙江大庆163318;东北石油大学石油工程学院,黑龙江大庆163318【正文语种】中文【中图分类】TE254【相关文献】1.静态推靠式旋转导向钻井系统的钻压传递效率 [J], 史玉才;滕志想;白璟;管志川;刘庆成;王恒2.静态推靠式旋转导向的导向力变化规律模拟研究 [J], 韩东东3.静态推靠式旋转导向工具造斜率预测分析 [J], 王恒;孙明光;张进双;管志川;史玉才;孙连忠4.静态推靠式旋转导向钻具静力学特性分析 [J], 毕研涛;柳贡慧;马清明;杨宁宁;朱杰然;刘建勋5.改进的静态推靠式旋转导向钻具组合力学模型 [J], 史玉才;滕志想;白璟;管志川;刘庆成;王恒;范致斌因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
科
学
技
术
与
工
程
Science Technology and Engineering
Vol. 16 No. 18 Jun. 2016 2016 Sci. Tech. Engrg.
天然气工业 石油、
[14]
。
3
应用实例与分析
推靠式旋转导向 BHA 结构参数如图 7 所示, 除 , : = 10ʎ , 特殊说明外 设井眼轨迹参数 井斜角为 α 方 位角为 φ = 0ʎ , 井眼曲率为 K = 3ʎ /30 m; 钻井参数: 3 泥浆密度为 1. 25 g / cm ; 钻头与地 钻压 W ob = 50 kN, 地层为横观各 层参数: 钻头各向异性指数 I b = 0. 75 , 向同性地层即地层各向异性指数 I r1 = I r2 = 0. 95 , 地 层倾角 γ = 20ʎ , 地层下倾走向方位角 φ f = 300ʎ ; 导 工具面角 0ʎ 。 下面对系 向参数: 导向力 F = 10 kN, 统的导向性能与各参数间的关系进行分析 。 3. 1 井眼轨迹对导向力的影响 图 8 为在不同井斜角和井眼曲率的情况下, 导 向钻具产生 3ʎ /30 m 的增斜效果所用导向力的大
2016 年 2 月 24 日收到 第一作者简介: 巩宪锋, 男, 副教授。 研究方向: 旋转导向钻井系统。 Email: xianfenggong@ 126. com。
F 为导向机 如图 1 所示, 沿钻头的上方往下看, , 构推靠井壁后产生的导向力 造斜工具的工具面为 钻具的中心线与导向力 F 的方向线构成的平面, 则 工具面角 ω 是以井眼高边 h 方向线为基准沿顺时 针旋转到工具面所转过的角度。 则导向力 F 作用 在井斜平面 P 和方位平面 Q 的分量分别为 F1 = F cosω ( 1) F2 = F sinω
推靠式旋转导向井眼轨迹预测与控制方法
巩宪锋 黄翔宇
( 北京科技大学机械工程学院, 北京 100083 )
是旋转 旋转导向钻井系统是现代导向钻井技术的发展方向 。 通过导向机构调节导向参数来预测和控制井眼轨迹 , 导向钻井系统的关键技术之一 。为解决推靠式旋转导向钻具的导向力和工具面角对井眼轨道的控制问题 , 对导向力分别在 摘 要 井斜平面和方位平面进行解耦 ; 并应用了纵横弯曲理论建立了底部钻具组合三维力学分析模型 , 得出了导向参数与钻头侧向 力和转角的定量关系 。在考虑钻头和地层的各向异性因素的影响下 , 利用在 UPC 模型基础上提出的有效钻力的概念 , 通过计 算钻头有效钻力来预测实钻过程中的钻进趋势 。在此理论基础上, 计算了按设计的井眼轨道钻进所需要的导向参数 , 并讨论 了井眼轨迹参数、 钻压、 钻头各向异性参数和地层参数对钻具导向性能的影响 ; 分析了其中的规律, 并得出只有综合考虑上述 各项因素, 才能准确计算出导向参数 , 确保钻头沿设计轨迹钻进 , 也为旋转导向井眼轨迹控制提供了理论依据 。 关键词 旋转导向系统 中图法分类号 TE21 ; 导向参数 力学分析 A 有效钻力 导向性能 文献标志码
[10 , 11]
。 F ( L1 - L S ) W ob y1 M1 q1 sinαL1 ( 3) - Pα = α + + L1 L1 L1 2
(
)
Aα =
q1 L M1 L1 F ( L1 - L s ) X ( μ1 ) + Z ( μ1 ) + α - W ob L1 24 E1 I1 6 E1 I1 F α sin[ k1 ( L1 - L s) ] y1 - ( 4) W ob sin( k1 L1 ) L1 式中, α 为钻头处井斜角; W ob 为钻压; q1 为第一段钻 KL ʃ 2
Fig. 3
图 3 底部钻具组合示意图 Structure of the bottom borehole assembly
图 3 是推靠式旋转导向底部钻具组合普遍应 [9] 用的结构 , 如图 2 , 以井斜平面 P 为例 , 应用纵横 弯曲法建 立 三 弯 矩 方 程 即 可 求 得 到 导 向 分 力 F α 与 钻 头 侧 向 力 P α 和 钻 头 转 角 Aα 的 函 数 关 系式
角同时变化的三维井身平面转化成井斜平面 P 和 [8 ] 方位平面 Q 两个二维问题进行分析 。
Fig. 1
图 1 导向参数示意图 The diagram of steering parameters
1
BHA 力学特性分析
推靠式旋转导向包括静态偏置推靠式 RSS, 如 AutoTrak 和动态偏置推靠式 RSS, 如 Power Drive , 它 们的工作方式均是通过导向偏置机构产生一定的导 向力, 在接触井壁后, 靠井壁的反作用力使钻头产生 [6 , 7 ] 。 因此通过底部钻 侧向切削力, 从而实现导向 研究导向力与钻头侧 具组合( BHA) 力学特性分析, , 向力和转角之间的关系 是推靠式 RSS 井眼轨迹控 制的关键之一。 1. 1 导向力的分解 在三维定向钻井过程中, 可以将井斜角和方位
{
图 2 井斜平面 P 内 BHA 受力分析 Fig. 2 BHA force analysis in plane P
18 期
巩宪锋, 等: 推靠式旋转导向井眼轨迹预测与控制方法
21
图 2 为 P 面内钻头至稳定器 1 的第一段钻杆进 B 端为稳定器。 设导 其中 A 端为钻头, 行受力分析, 向力作用在 C 点, 根据图 2 所示, 导向力 F 作用在 井斜平面 P 内的横向集中载荷为 ( 2) F α = F1 cosλ = F cosωcosλ / R , L ( 2 ) , = L 式 中 λ s s 为导向装置中点到钻头处的 R 为井身轨迹投影在平面 P 内的近似圆弧的 距离, 曲率半径。导向力 F 作用在方位平面 Q 内的横向 集中载荷 F φ 亦可用上述方法得出。 1. 2 钻头侧向力和偏转角的计算
由此可以得出导向参数与钻头侧向力和钻头转角间 的联系。
2
利用有效钻力预测井眼轨迹
推靠式旋 转 导 向 井 眼 轨 迹 预 测 , 是在已知钻 具组合 、 地层参数和钻井操作参数的情况下 , 根据 给定的导向参数估测钻头的钻进趋势 。 根据上述
O 点为钻 如图 4 , 建立井眼轨迹坐标系 OXYZ , X 轴指向井眼高边, Y 轴指向增方位方向, Z 头处, 轴为钻头轴向进给方向。则有效钻力即为变井斜力 R2 R1 , 变方位力 R2 和轴向进给作用力 R3 。 在 R1 , 和 R3 的共同作用下, 钻头沿着三者的合力方向钻 进。下面分别从井斜变化和方位变化具体分析在三 者的作用下井眼轨迹的变化趋势。 从图 4 可以看出, 当前钻头处于井斜角 α, 方位 角 φ, 当给定推靠力 F 和工具面角 ω 时, 可根据上述 方法计 算 出 钻 头 处 实 际 变 井 斜 力 R α 和 变 方 位 力 Rφ 。 图 5 中, 变井斜力 R1 和轴向力 R3 决定井斜角 , 的变化 所以得到新井斜角。 R1 ( 7) α' = α + arctan R3
( )
由于方位角是井眼轴线上任一点的正北方向线
22
科
学
技
术
与
工
程
16 卷
图 7 底部钻具组合结构参数示意图 Fig. 7 BHA structual parameters
图 5 钻头 P 面受力分析 Fig. 5 Mechnical analysis on plane P
所 与该点的井眼方向线在水平面投影线间的夹角 , 以将钻头处影响方位角变化的力投影到水平面上 , 如图 6 所示, 即可得到新方位角。
随着井斜角的增加, 导向力需要增加 小。由图可知, 才能满足条件, 这是由于底部钻具产生的降斜钟摆 力变大; 已钻井眼曲率越大, 所需导向力越大, 因为 在弯曲的井眼中, 由于钻具的自身的抗弯刚度会产 , 生一定的“反弹效应 ” 会减小钻头处的增井斜力。 所以当井斜角和井眼曲率变大时均需要增加导向力 来补偿减小的造斜力。
( )
3. 2
地层参数对钻头有效钻力的影响 图 9、 图 10 为 当 工 具 面 角 ω = 30ʎ 时 , 分别得 出钻头处变井斜力 R 1 和变方位力 R 2 在不同地层 参数下 的 变 化 趋 势 。 通 过 BHA 力 学 分 析 得 到 的 P φ = 3 968 N , 由此可 钻头处机械力 P α = 5 252 N , 见, 因地层的各向异性的影响 , 钻头的机械力和有 效钻力差别 较 大 , 不能仅仅依靠钻头机械力来预 因此符合完 测井眼轨迹 。 由于 I r1 = I r2 = 0. 95 < 1 , 全上倾规律
图 6 钻头 Q 面受力在水平面的投影 Fig. 6 Mechnical analysis on horizontal plane
Fig. 8
图 8 不同井眼轨迹下所用导向力 The steering force in different well trajectory
R2 ( 8) φ' = φ + arctan R' 式( 8 ) 中, ( 9) R' = R3 sinα + R1 cosα 根据式( 7 ) 式 ( 9 ) 即可预测出下一点的井斜 和方位角。也可根据上述方法, 在给定的下一点期 望的井斜和方位角的情况下计算出所需的推靠力和 工具面角。
BHA 力学特性分析 , 能够得出钻头处力矢量 F = T Pp , W ob] 。但 是 在 实 际 钻 井 钻 过 程 中, [ Pa, 由于 地层以及钻 头 的 各 向 异 性 钻 井 效 应 的 存 在 , 会产 生自然井斜 的 变 化 和 方 位 漂 移 , 所以钻头并不会 按照 F 的方向钻进 。 因此本文利用在 UPC 模型基 [12 , 13] , 通过计算钻头 础上提出的有效钻 力 的 概 念 有效钻力来预测实钻过程中的钻进趋势 。 有效钻 力可表示为 T R2 , R3] = TF ( 5) R =[ R1 , T = I b I r1 E + I b ( 1 - I b ) A + I r1 ( 1 - I b ) B + I b ( I r2 - I r1 ) C + ( 1 - I r1 ) ( 1 - I b ) AB + ( I r2 - I r1 ) ( 1 - I b ) CB ( 6) I r1 和 I r2 分别为钻头和地层的各向异性指 Ib , 式中, [ E] 矩阵 AC 与井斜角 α、 地层倾角 数, 为单位矩阵, γ、 方位角 φ 和地层下倾走向方位角 φ f 的 8 夹角 Δφ ( Δφ = - f ) 有关, 矩阵 B 与钻头转角有关。