南理工机械原理课件概论
南京理工大学机械原理chapter3kynematicanalysisppt课件共49页

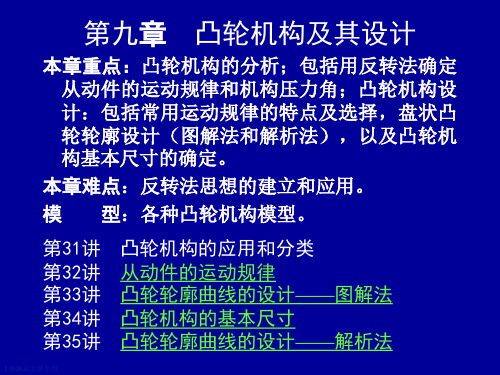
A VA2A1 B
2
1 P12
V B2B1
Attention:
instant center a pair of coincident(重合) points, the absolute(绝对) velocities of which are the same, in both magnitude(大小) and direction.
Position: to determine whether all links will interfere(干涉) with each other,to find locus(轨迹) Velocity: to calculate the stored kinetic energy(动能) or power(功率) P. Acc.:To calculate the dynamic forces
Example2:For the following Slider-Crank Mechanism,Given: lAB, lBC,φ,ω1 ①locate all instant centers for the mechanism ②the velocity of follower link3 V3 。
具有相同的绝对速度的重合点 。
relative velocity is zero. 两构件上相对速度是零的重合点
3.2.2 Number of Instant Centers of a Mechanism 发生相对运动的任意两构件之间都有一个瞬心
NCk2k(k2!1)k(k21)
k—number of links including the frame
Solution:
(1) Find Instant center P23
南京理工大学机械原理课件资料
第32讲 从动件的运动规律
§9-2 从动件的运动规律 一、从动件的运动规律 二、从动件的常用运动规律 三、从动件运动规律的选择
上海海运大学专用
一、从动件的运动规律
1、四个行程 以图9-6所示的偏置直动尖顶从动件盘状凸轮机构为例。 设O为凸轮的转动轴心,w为其匀角速度,凸轮轮廓由 四段曲线组成:曲线AB,O为圆心的圆弧 BC ,曲线 CD和基圆的 DA 圆弧。
且四大角可用偏距圆 的 4 条切线间的夹角 表示,如图 9-6 所示。
图9-6
上海海运大学专用
2、从动件的位移曲线
上述分析过程体现了反转法的思想: 让凸轮固定不动,推杆一方面随同机架沿-w方向 绕 O 反转,另一方面受凸轮轮廓所迫相对机架 作往复运动,则推杆与凸轮间的相对运动不变。 据反转法,易求得当尖顶与凸轮轮廓接触于任一 点E的推杆位移s=E'E和凸轮转角d=∠AOE',其 中E'为过E点的偏距圆切线和基圆的交点。 用同样的方法 ,求出许多 对(d,s)值,然后在 dOs 平面内作出推杆的位 移 曲 线 s=s(d) 。 s=s(d) 称 为从动件的运动规律。
上海海运大学专用
回程
回程:尖顶与凸轮轮廓接触点: C→D ,推杆由 最高位置 A' 下降到最低位置 A ,在回程运动过程 中 凸 轮 转 过 的 角 度 d0' 称 为 回 程 运 动 角 , d0'=∠C'OD。 近休:尖顶与凸轮轮廓接触点:D→A,推杆近停 不动;在近休运动过程中凸轮转过的角度d02称 为近休止角,d02=∠DOA。 显然,四大角的和等于2p。即 d0+d01+d0'+d02=360° (1 )
(d 0 d 01 d d 0 d 01 0.5d 0 )
南理工 机械原理课件 第一章 平面机构的结构分析1
1—2 运动副、运动链、机构
一. 运动副及其分类 运动副:二个构件相互接触且有相对运动的联接.
球销副
分类: 低副 转动副 : 两构件只能作相对转动 移动副 : 两构件只能作相对移动 高副
面接触—— 低副
点、线接触——高副
二 . 运动链: 构件通过运动副联接形成的系统. 闭链:特点是 每个构件至少有两个运动副。 运动链 开链:特点是有的构件只有一个运动副。 2
第一章
1—1
目的
1—2 运动副、运动链、机构 1—3 机构运动简图(机构图) 1—4 平面机构自由度计算 1—5 平面机构的组成原理及结构分析
平面机构:各构件在相互平行的平面内运动
空间机构:运动平面不完全平行(如锥齿轮传动)
锥 齿 轮 传 动
锥 齿 轮 传 动
1—1
目的
1. 探讨机构运动的可能性 及运动确定的条件 2. 探讨机构的分类 3. 绘制机构运动简图
1—5 平面机构的组成原理及结构分析
一、平面低副代替平面高副(高副低代)
平面机构 平面低副机构 :全部为低副(转动副、移动副) 平面高副机构:至少有一个高副
高副低代的目的:
为了将低副机构 的分析方法(分析方法成熟)用 于高副机构。
条件:保证代替前后机构的瞬时速度、加速度不变,
机构自由度不变。 例1:
一个高副用位于曲率中心处的二个转动副及一个构件代替.
例3:
O1
4 2
C
O1 A 1 3 2 B
A
1
B
3
O1 A
B
高 副 低 代
例4: 两接触轮廓之一为一点
c
o
点的曲率
半径为零
c
o
二、组成原理:
南京理工大学机械原理第10章课件
上海海运大学专用
以滑块3为示力体,由力平衡条件可得:
R23 Q Q cos 或R23 sin( 90 ) sin 90 ( 2 ) cos( 2 )
R32 F F cos 或R32 sin( 2 ) sin 90 sin( 2 )
上海海运大学专用
在一般情况下,机构中的驱动力和阻力为常数,有必要研究 效率能否用力(力矩)表示。 图示为一机械传动示意图
F vF
Pr QvQ Pd FvF
F为驱动力,Q为生产阻力 设该装置为不存在有害阻力的理想机器
Q vQ
机 器
F0——对应于Q的理想驱动力; F0 <F Q0——对应于F的理想有效阻力, Q0 >Q
上海海运大学专用
例1推导图所示偏心夹具的自锁条件。
解 : 要求在夹紧工件并撤 去手柄力 F 后,保证偏心 盘不能松转。
显然,使偏心盘发生松转 的力是 FR23 ,而 FR23 是作 用在轴颈O上的主动外 力。由轴颈的自锁条件 知,应保证: a=s-s1≤
上海海运大学专用
由几何关系知:
D s1 AC sin 2
Wk
k
W' k
(3)混联
由以上两种方法先分别求出后再根据具体路线计算
上海海运大学专用
二、机器的自锁 1、机器的自锁条件:
Wf 0
1
(1)若 W W f d
Wf Wd
0
1
0
(a)若机器原来就在运动,那它仍能运动,但此时,∴机器 不作任何有用的功,机器的这种运动称空转。 (b)若机器原来就不动,无论驱动力为多大,它所作的功 (输入功)总是刚好等于摩擦阻力所作的功,没有多余 的功可以变成机器的动能。∴机器总是不能运动,即发 生自锁
南京理工大学机械原理内部讲义8

第八章 平面机构的平衡(一)教学要求掌握静、动平衡的计算方法(二)教学的重点与难点动平衡原理及计算(三)教学内容§8-1 平衡的目的和分类一、平衡的目的:尽量减小惯性力所引起的附加动压力。
附加的动压力:①附加载荷;②振动(源)二、平衡的分类回转件的平衡:刚性回转件,柔性回转件(有专门学科)机架上的平衡:(平动和平面一般运动的构件)§8-2 刚性回转件的平衡 一、质量分布在同一回转面内(5>bd )盘类 惯性力组成一平面汇交力系i F ∑ 若i F ∑=0,平衡的 若i F ∑≠0,不平衡的 平衡:0=+∑b i F F具体:加一平衡质量块m b0332211=+++=b b r m r m r m r m mee=0(总质心在回转轴线上) 静平衡:各质量块的质径积的矢量和为零,或i F ∑=0例:曲轴的平衡等效条件:⎩⎨⎧''''=''=''+'l F l F F F F b bb b b ∴⎩⎨⎧''''''='''=''''+''lr m l r m r m r m r m b b b b b b b b b bb b b r r r =''='求出b bm m ''',。
二、质量分布不在同一回转面内各部分质量的惯性力组成——空间力系空间力系:主矢 0=∑i F主矩 0=∑i M 平衡原理:0=∑i F 0=∑i M措施:(将每个平面的惯性力平衡力)动平衡:主矢 0=∑i F主矩 0=∑i M 比较:静平衡:0=∑i F(经过动平衡的回转件一定是静平衡的,反之,静平衡的回转件不一定是动平衡的。
)§8-3 平衡试验法静平衡:动平衡:。
南京理工大学机械原理课件 第五章 齿轮机构及其设计

1、齿廓不同高度上的压力角均相等,且等于齿 廓的倾斜角,此角称为齿形角,标准值为20° α =齿形角(20°) 2、齿廓在不同高度上的齿距均相等,但齿厚和槽宽各不相同 p=пm, 分度线(齿条中线):s=e 3、尺寸计算:同标准齿轮一样
五、任意圆上的齿厚
§5—5 渐开线直齿圆柱齿轮的传动 一、啮合过程
ha m
*
要求:
h a* m
被加工齿轮: hf h m c m
* a *
中线
pm 2
pm 2
圆弧角
c *m
刀具比标准齿条在齿顶部 高出 c * m 一段
顶刃线
c
*
m
刀具齿顶线
ha* m
中线
ha* m
mபைடு நூலகம்
m
c *m
首先,将轮坯的外圆按被 切齿轮的齿顶圆直径预先 加工好。 然后,将刀具的中线与轮坯 的分度圆安装成相切的状态。
* 标准值: ha =1,c * =0.25 * 非标准短齿:ha =0.8, c * =0.3
三、标准直齿轮的几何尺寸
标准齿轮:标准齿轮是指m、α、ha*、c* 均取标准值,具有标 准的齿顶高和齿根高,且分度圆齿厚等于齿槽宽的齿轮。 一个齿轮: d=mz da=d+2ha=(z+2 ha*)m df=d-2hf=(z-2 ha*-2 c*)m db=dcosα 一对标准齿轮: ha= ha*m hf=( ha*+ c*)m h=ha+hf=(2 ha*+ c*)m P=πm
2、重合度的意义
重合度不仅是齿轮传动的连续性条件,而且是衡量齿 轮承载能力和传动平稳性的重要指标。
3、重合度的计算 由左图看出:
南京理工大学机械专业机械原理课程ppt(第五章齿轮机构及其设计)
四、渐开线标准内齿轮
1) 内 齿 轮 的 轮 齿 是 内 凹 的 , 其 齿 厚 对 应 于 外 齿轮槽宽,其齿槽宽对应于外齿轮齿厚
2)内齿轮齿顶圆小于分度圆,齿根圆大于分度圆
3)内齿轮齿顶圆大于基圆。 (一般情况下,外齿轮
的基圆大于齿根圆)
五、任意圆上的齿厚 分度圆:r, s, α,θ 任意圆:ri,si,αi,θi 基圆:rb
0.1 0.12 0.15 0.2 0.25 0.5 0.4 0.5 0.6 0.8
第一系列 1 1.25 1.5 2 2.5 3 4 5 6 8
10 12 16 20 25 32 40 50
第二系列 0.35 0.7 0.9 1.75 2.25 2.75 (3.25) 3.5 (3.75) 4.5
愈平直
4)渐开线的形状决定于基圆的大小 5)基圆以内无渐开线
3、渐开线的方程
rK——K点的向径 rb——基圆半径
αK—ቤተ መጻሕፍቲ ባይዱ压力角
二、渐开线齿廓 1、渐开线齿廓满足定传动比的要求 N1N2---公法线
两基圆内公切线
交点P为固定点节点节圆
2、渐开线齿廓啮合的特点 (1)渐开线齿廓啮合的啮合线是直线 N1N2---公法线 ---两基圆内公切线 ---啮合点轨迹 啮合线动画 (2)渐开线齿廓啮合的啮合角不变
∴分度圆——齿轮上具有标准模数和标准压力角的圆
(4)齿数z z影响到齿轮的大小(d=mz)和渐开线齿廓的形状
(5)齿顶高系数ha*和顶隙系数c* 将齿顶高、齿根高变成以模数为基础的计算
正常齿
当 当mm<≥11时:h1h1aa**==
c*=0.25 c*=0.35
短齿
ha*=0.8 c*=0.3
《机械原理》ppt课件

01机械原理概述Chapter机械原理的定义与重要性定义重要性机械原理的研究对象和内容研究对象主要研究各种机构(如连杆机构、凸轮机构、齿轮机构等)和机器(如内燃机、电动机、机床等)的工作原理、运动特性、力学性能以及设计计算方法等。
研究内容包括机构的组成原理、运动学分析、动力学分析、机械效率与自锁、机器的平衡与调速等。
机械原理的发展历程和趋势发展历程发展趋势02机构的结构分析与设计Chapter机构的基本概念和分类机构定义由刚性构件通过运动副连接而成的系统,用于传递运动和力。
机构分类根据运动特性可分为连杆机构、凸轮机构、齿轮机构等。
运动副类型包括低副(转动副、移动副)和高副(点接触、线接触)。
结构分析通过自由度计算、运动链分析等方法,确定机构的组成、运动特性和约束条件。
综合方法基于功能需求,选择合适的机构类型,进行组合、变异和演化,设计出满足特定要求的机构。
创新设计运用创新思维和现代设计方法,如拓扑优化、仿生学等,进行机构创新设计。
机构的结构分析和综合方法机构设计的原则和方法设计原则设计方法案例分析03机械传动与驱动Chapter机械传动的类型和特点摩擦传动啮合传动利用齿轮、链轮等啮合元件传递动力和运动。
具有传动效率高、工作可靠、使用寿命长等优点,但需要较高的制造精度和安装精度。
齿轮类型选择齿轮参数设计强度校核030201齿轮传动的设计与分析链传动和带传动的设计与分析链传动设计带传动设计强度校核液压与气压传动的设计与分析液压传动设计01气压传动设计02控制与调节0304机械系统动力学与振动Chapter机械系统动力学的基本概念和方法动力学基本概念动力学建模方法动力学分析方法机械系统的振动分析和控制振动基本概念振动分析方法振动控制策略机械系统动力学优化设计方法优化设计基本概念动力学优化设计方法优化设计实例分析05机械制造工艺与装备Chapter机械制造工艺的基本概念和流程机械制造工艺的基本概念机械制造工艺的流程机械制造装备的分类和特点机械制造装备的分类机械制造装备的特点先进制造技术是指基于先进制造理论、技术和方法的总称,包括计算机辅助设计(CAD )、计算机辅助制造(CAM )、计算机辅助工艺规划(CAPP )、数控技术(NC )、柔性制造系统(FMS )等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
求: iHa
解:
i Ha
i
b Ha
1 1 iaHb
1 10000
1 ( zc zb )
η= 0.25%
若为定轴轮系
za zc
iab
zc zb za zd
0.9999
cc
dd
iba
1 iab
1.0001
aa
H
bb
若 Za = 99
则 iHa = = -100
●
例 3. 已知: Z1 = 15,Z2 = 25, Z2’ = 20
公式:
imHn
nmH nnH
nm nH nn nH
z(m1) zn zm z(n1)
若是行星轮系(设中心轮n固定)
传动比计算要点: 分清轮系 注意符号 掌握技巧
差动
imHn
nm nH 0 nH
imH 1
行星
imH 1 imHn ●
例 1. 已知 Z、na 求: iaH 、iac、nH、nc
1
4
2 4
3 1
●
§2 定轴轮系的传动比
一、一对齿轮的传动比
大小 i12=1/ 2 =Z2/Z1 转向
外啮合转向相反 取“”号 内啮合转向相同 取“+”号
二、定轴轮系传动比计算
i15 1 / 5
1 2 3 5 2 3 4 5
z2 z3 z4 z5
(从动轮齿数积)
z1 z2 z3' z4'
(主动轮齿数积)
2 3
H 1
与系杆同轴线、与行星轮相啮合、轴线固定的齿轮.
4. 主轴线 —— 系杆和中心轮所在轴线. 5. 基本构件 —— 主轴线上直接承受载荷的构件.
2
3
H
1
4
2 4
H 1
5 3
●
分类 1. 按自由度分
F = 1 —— 行星轮系. F = 2 —— 差动轮系.
2. 按基本构件分
2 3
有一个中心轮固定
3. 轮系
—— 由一系列齿轮组成的传动系统.
二.轮系的分类
1. 定轴轮系 (普通轮系) 所有齿轮轴线均固定的轮系.
2. 动轴轮系 (周转轮系)
至少有一个齿轮的轴线不固定的轮系.
3. 复合轮系 (混合轮系) 由定轴 — 动轴或多个动轴轮系组成的轮系.
1450rpm 1 3
2 4
5 53.7rpm
6
2 3
H
H
0
1H 1 H
H 2
2
H
H 3
3
H
公式: 注意:
imHn
nmH nnH
nm nH nn nH
z(m1) zn zm z(n1)
1) 齿数连乘积之比前的“”号取决于转化轮系中m、n轮的转向; 2) 轮m、轮n和系杆H必须是同一个周转轮系中轴线平行或重合的三个构件; 3) nm 、nn 、nH 中,已知值应根据转向相同还是相反代入正负号,未知值的转向由计算结果判定。
H 1
没有固定的中心轮
2 3
H 1
3K
2K- H
2K- H
2K- H
K-H-V
万向联轴节
●
二、周转轮系的传动比计算
假定系杆固定时,所得到的“定轴轮系”, 称为原周转轮系的转化轮系。
c
b
H
a
c
b
H
a
周转轮系中,任两构件相对于系杆 H 的速比,称为该轮系的转化轮系的传动比(假想为定轴轮系传动比)。
H H
n1n3 n5 = ——n2——nn4 6
1450rpm 1 3
= i12 i34 i56
分步传动
5 2
设:i12 = i34 = i56 = 3 则: i16 = i12 i34 i56 = 3×3×3 = 27
4
6
●
53.7rpm
设令 d1 = d3 = d5 = 53.7mm
则: d2=i12d1=3×53.7=161.1mm d4=i34d3=3×53.7=161.1mm d6=i56d5=3×53.7=161.1mm
Z3 = 54。 求: iSH
解:
i SH
i
3 SH
1
i
H S3
1 ( z2 z3 ) z1 z2'
1 2854 10 1214
例 5.
已知: Za = Zb 、na、nH 求: nb
解:
iaHb
na nH nb nH
zb za
1
na nb 2nH
nb 2nH na
注意
iaHc
na nc
nH nH
c
H
a
b
c
H
a
b
●
§4 复合轮系及其传动比
一、复合轮系(由两个以上轮系组成) 判别:不能通过一次反转得到一个定轴轮系
2 3
H 1
2
3
H
1
4
2 4
H
1 5
3
H
H H
●
二、复合轮系传动比计算
例 6.
已知Z,求i1H
解: 由定轴轮系1-2
周转轮系2´-3-4-H 组成
i12
c
b
解:
nb = 0
iaH 1 iaHb
搭桥
1 ( zc zb ) za zc
aHBiblioteka iac iaH iHc(1
iaHb
)
1 icH
1 1
iaHb icHb
1 ( zc zb )
za zc
1 zb
2 2’
H
1 4
nH
na iaH
zc
nc
na iac
3
i14= ?
●
例 2. 已知: Za = 100、Zb = 99、 Zc = 101、Zd = 100
Z3 = 60, n1=200 rpm, n3=50 rpm, 转向图示。 求: nH
解:
i1H3
n1 nH n3 nH
z2 z3 z1 z2'
200 nH 25 60 50 nH 15 20
nH 8.33 rpm
例 4. 已知: Z1 = 12,Z2 = 28, Z2’ = 14,
1 2
4 3
i14 = - ———ZZ21
Z4 Z3
1 2
2
7
3
8
3
6
4
5
1 4
6 5
i16
=
———ZZ21—
Z4 Z3
Z6 Z5
i18 =
Z2 Z4 Z6 Z8 Z1 Z3 Z5 Z7
●
§3 周转轮系的传动比
一、周转轮系及其分类 名称
1. 行星轮 —— 轴线活动的齿轮. 2. 系杆 (行星架、转臂) H . 3. 中心轮 ——
§1 齿轮系及其分类
一、轮 系
1. 一对齿轮传动
n1n2 i12 = ——
Z2Z1 = ——
d2 = ——d1
1450 = ——53—.7
1450 rpm 1
2
= 27
53.7 rpm
搪杆
设 d1 = 53.7mm
, 则 d2 = i12d1 = 27×53.7 = 1450mm
2. 多对齿轮传动
n1n6 i16 = ——
•负号表示轮1和轮5转向相反。 •轮2称为中介轮(惰轮、过轮)
箭头表示转向
●
说明: 1.定轴轮系的传动比=各对齿轮传动比的连乘积
=所有从动轮齿数的连乘积/所有主动轮齿数的连乘积 2.首末两轮的转向相同取“+”号、转向相同取“-”号。
(注意:若首末两轮轴线不平行只能用箭头表示) 3.中介轮(惰轮)不影响传动比的大小,但改变了从动轮的转向。