管道清灰机器人的设计
中央空调管道清洁机器人的创新设计
中央空调管道清洁机器人的创新设计摘要:本文主要结合国内外的中央空调机器人的发展,讲述课题的意义和背景,其中重点介绍了中央空调管道机器人采用导向轮制作的行走方案和旋转刷的清扫方案。
同时,针对中央空调管道清洁机器人清洁收尾增加了收集装置。
对重点工作和探讨内容进行归纳总结,并对今后的研究方向做出了展望。
关键词:机械设计;中央空调;机器人;电动机;导向轮一、引言近几年来,中央空调管道的不得当清洗引起了重大关注。
由于中央空调管道设备所占面积较大,长期使用后,细菌灰尘会堆积在空调内部,而随着空调送风系统的运行,会将管道中的细菌和灰尘吹到室内,严重影响到室内空气质量,导致人们呼吸和皮肤时常出现问题。
不仅如此,灰尘的堆积导致散热片堵塞,空调的运转时间及电流成本增加,从而导致空调使用寿命减少,由于楼层结构不同,所安装的空调管道也是纵横交错,并且管道直径也会因为空间大小不同,拐角和衔接扣的清理更是人力短时间不能解决的。
因此,清洁机器人的产生不仅可以更高效地对管道进行清扫、消毒,更能够解决人力清洁所带来的不卫生难题。
因此,采用专用的清洁机器人对中央空调管道进行清洗工作。
我国2004年以来尽管研究的很多,但真正成型投入使用的并不是很多,产品和市场不成熟,而国外的相关产品大多功能单一,智能化水平低,价格又昂贵。
因此国内市场一系列低成本、高效率的机器人相继投入市场。
目前,中央空调机器人的发展趋势将是:增加机器人的适应性,能够运用与多种场景。
中央空调管道清洗机器人技术的成熟和其产品的国产化,会进一步提高我们的物资和文化生活,其研究和发展具有广阔的应用前景、重要的社会意义和经济效益二、工作原理本次设计的机器人主要用于空调管道的清洁,大体由行走机构、清扫装置、控制系统组成。
其中行走机构又包括了驱动机构和导向轮系统两个部分,驱动装置主要采用单电机驱动机器人的前轴,通过对支撑臂上的零件进行调节从而调节导向轮的间距,确保机器人在进入管道以后,两个导向轮两端与管道壁保持大约20mm的距离。
中央空调管道清洗机器人毕业设计

1.3.1
可重构机器人的优点众多,但由于身体结构、动力驱动和运动形式的原因它也存在很多的缺点:
1.管道机器人的较多自由度是机器人能够完成各种复杂的运动,组成各种构型。但在控制上,给完成这些自由度的软硬件控制的实此,管道机器人寿命也会相对的缩短。因为管道机器人是在空调管道中运动,所以希望机器人轻巧且耐用,选择材料时要特别的注意。
图1.2中央空调管道机器人
目前国内外都在积极努力的研究中央空调管道清洗机器人,以及其他清洗设备和侦探设备。但这些设备都有其不可避免的局限性和对空调风管以及其他外部环境特殊要求,兼容性和对环境的适应性较差。同时市场上也急需一种能够适应各种环境的,兼容性和适应性较强的清扫设备。对此现状我们发明制造了这款中央空调管道机器人。
Keywords:Adaptivemobile mechanismpipe robotMechanical design Screw—drive.
1
1.1
机器人技术是涉及机械学、传感器技术、驱动技术、控制技术、通信技术和计算机技术的一门综合性高新技术,既是光机电软一体化的重要基础,又是光机电软一体化技术的典型代表。其产品主要有两大类,即以日本和瑞典为代表的一系列特定应用的机器人,如弧焊、点焊、喷漆装备、刷胶和建筑等,并形成了庞大的机器人产业。另一类是以美国、英国为代表的智能机器人开发,由于人工智能和其它智能技术的发展远落后于人们对它的期望,目前绝大部分研究成果未能走出实验室。 机器人系统集成技术也是由几个主要发达国家所垄断。近年来,机器人技术并未出现突破性进展,各国的机器人技术研究机构和制造厂商都继续在技术深化、引进新技术和扩大应用领域等方面进行探索。
1.3
推荐-机械手管道清洁机器人总体设计说明书全套图纸

摘要上海有中央空调的1万多栋大楼中,大多数空调机组的通风系统自运行以来,也从未做过清洗。
未清洗的集中空调内可能有颗粒物、霉菌、螨虫、细菌、军团菌、藻类等各种污染物,会给人带来烦闷、乏力、嗜睡、不快感、肌肉痛、易感冒、咽痛、头晕等诸多健康危害。
因此,本设计设计了一个小型管道清洁机器人。
管道清洁机器人的设计包括视觉系统,移动系统,清洁毛刷系统,吸尘系统和控制系统。
关键词:管道,清洁,视觉,移动,清洁毛刷,吸尘,控制ABSTRACTShanghai has central air conditioning in buildings more than 10,000 buildings. Most of the ventilation system air conditioning units from using has never cleanned. Uncleaning of central air conditioning maybe particulate, mold, mites, bacteria, Legionella, algae and other pollutants, which will bring boredom, fatigue, sleepiness, displeasure, muscle pain, mon cold, sore throat, head corona, and many other health risks. Therefore, the design designed a small duct cleaning robot. Duct cleaning robot design includes the visual system, mobile system, cleaning brush system, vacuum system and control system.Key words: pipe, cleaning, visual, moving, cleaning brush, cleaning, control目录1绪论 (1)1.1 中央空调的现状分析 (1)1.2 管道清洁机器人的技术要求 (1)2机器人的视觉系统 (2)2.1 摄像头 (2)2.2 照明灯 (3)3机器人的运动系统 (4)3.1 底板的设计 (4)3.2 驱动电机的选择与设计 (4)3.3 轮胎的选择 (5)3.4 转向机构的设计 (6)3.5 机器人移动的实现方法 (7)4机器人的清洁系统 (9)4.1清洁毛刷的设计分析 (9)4.2 旋转刷的设计及材料选择 (10)4.3 驱动电机的选择 (10)4.4 手臂的设计 (11)4.5 支撑架的设计 (11)4.6 传动带的设计 (13)4.7 带轮的设计 (14)4.8 驱动轴的设计 (16)4.9 联轴器的选择 (17)4.10 轴承、轴套等零件的选择与设计 (18)5机器人的吸尘系统 (19)5.1 吸尘系统的设计分析 (19)5.2 电机的选择 (19)5.3 叶片的设计 (20)5.4 外壳的设计 (21)5.5 其他零件的设计 (22)6机器人的控制系统 (23)6.1 控制系统的设计概述 (23)6.2 控制系统各硬件的介绍 (24)6.3 电路板的设计 (28)6.4 上位机的控制面板设计 (30)6.5 单片机的编程 (31)6.6 系统抗干扰措施 (33)结论 (34)参考文献 (35)致谢 (36)1 绪论1.1 中央空调的现状分析“20XX中国国际工业博览会科技论坛——公共场所卫生与标准化国际研讨会”在沪举行。
履带式管道机器人方案

牵引力较大,对管壁压强较小。
以适应最小500的管径,管径大于500时,两侧负重轮下压,改
变履带形状使其与管壁贴合,增大履带与管壁接触面积。
动力
由于管道内壁沉积粉尘可能
为铁粉尘、铝镁粉尘或面粉;
考虑防爆,采用气动或者软
轴驱动。本处设计采用阿特
拉斯·科普柯公司的一款气动
马达作为驱动装置,若采用
软轴,则修改其中减速器及
部分连接件结构即可。
履带式管道自动清灰机器人设计方案
适用环境要求
适用管道形状:圆形;
适用管道直径、长度:管道直径500~800mm;管道长度不超过50m;
适用管道的布置:水平直管道和小于5度的倾斜直管道;
管道连接部分内壁错位高度不超过10mm;
管道内壁沉积粉尘可能为铁粉尘、铝镁粉尘或面粉;
适用于有水平或竖直分支口的管道,分支口直径为主管直径的3分之2。
行走方式
序号
方式
1
轮式
2
螺旋式
3
履带式
4
蛇形式
5
多足式
6
蠕动式
工作原理
优点
缺点
结构简单,控制灵活,
复杂管道通过性能差,越
平坦路面性能优越
障能力不足
驱动效率高,牵引力大, 运动速率较慢,清扫机构
运动平稳,
设计复杂
牵引附着性能好,越障
摩擦力大,对于平坦路面
能力较强
能量利用率低
越障能力好,弯道通过
姿态和运动控制复杂,负
三轮腿结构相同,亦可以保证三条轮腿在管道截面不是标准圆形的情况下总能与管
壁保持良好接触。安装时绞牙减振器可以调节弹簧高度,使履带张紧。
中央空调管道清洁机器人的设计2

衢州学院毕业设计〔论文〕题目:中央空调管道清洁机器人的设计作者:童顺丙系〔部〕:机电控制工程学院专业班级:机械设计与制造08级〔1〕班指导教师:田敬职称:讲师二O一一年一月十八日中央空调管道清洁机器人的设计摘要本次设计的机器人用于污染的中央空调管道的清洁,整体结构主要由行走机构、清扫机构和监视控制系统三局部组成,行走机构又分为驱动机构、导向轮系统两局部。
驱动方式为单电机驱动机器人前轴。
在清扫之前,通过调整支撑臂上的螺钉来调节两个导向轮的横向距离,保证机器人处于管道中央时导向轮两端距管道壁各有约20mm。
清洁工作主要由旋转刷系统完成,旋转刷由气动马达驱动,与气动马达相连的刷杆采用伸缩式结构,可以进行长度调节;旋转刷头可拆卸并且有不同的材料和尺寸系列,整个装置可以进行俯仰调整,从而保证在管道都能彻底清扫到管道的边角和顶部。
在清扫过程中,利用气动马达吹出的高压空气将扫落的灰尘吹向前方,便于抽风机抽出。
清洁过程中,通过监视系统可以方便的对清扫情况进行实时监控,当出现清扫效果不理想时可以操纵机器人后退再清扫一次。
关键字:中央空调管道,清洁机器人,马达,旋转刷目录第一章概述 (1)课题的背景及意义 (1)机器人开展现状及趋势 (2)国内领先水平的管道清洁机器人 (2)中央空调管道清洁机器人开展趋势 (3)1.3本课题的设计任务 (3)第二章中央空调管道机器人系统设计 (4)工作原理及组成 (4)机器人设计原那么 (5)2.3整体方案选择 (6)第三章行走机构设计 (8)机器人驱动机构 (8)电机的选择 (8)传动齿轮的设计 (9)传动轴的设计 (14)导向轮系统 (17)导向轮系统原理 (17)电机的选取 (17)传动带的选择 (18)导向轮的设计 (20)第四章清扫机构 (23)清扫方案确定 (23)旋转刷系统主要构件 (24)构件的选择 (24)气动马达的选择 (24)旋转刷的设计 (26)第五章监视控制系统 (28)摄像头的选择 (28)摄像头的固定和调整 (28)监视器 (29)照明装置 (29)灰尘收集装置 (30)第六章总结 (32)参考文献 (33)谢辞 (32)第一章概述课题的背景及意义随着当今社会的开展,空调通风系统在日常生活中发挥着越来越重要的作用。
管道除尘机器人结构设计(机械CAD图纸)
管道除尘机器人结构设计(机械CAD图纸)题目:管道除尘机器人结构设计摘要基于利用行星磨头清洗技术对管道进行清洗的目的,在总结现有的管道机器人设计方案的基础上,根据现场的实际情况,论文首先对管道清洗机器人行走部分进行方案设计,经分析比较后确定了新型管道清洗机器人行走的较佳设计方案,并据此方案对机器人作了行走部分结构设计;对机器人的行走特性进行了研究,提出了使机器人在管道内能够保持稳定运行的方法.通过对机器人机构的设计和机器人在直管道内运动情况的思考研究,进一步验证了设计思想的可行性。
最后,研究了管道清洗机器人行走系统的安全性能,给出了在高压情况下保证行走系统安全的基本方案,为管道清洗机器人系统的实用化提供可靠的依据。
关键词: 管道机器人;安全防护 ;行走II本科机械毕业设计论文CAD图纸 QQ 401339828AbstractBased on the use of planetary grinding head cleaning technology for the purpose of cleaning pipes, at the conclusion of the existingpipeline robot design based on the actual situation at the scene, the first paper on the pipe cleaning robot to walk part of program design, by analysis and comparison a new pipeline after cleaning robot designed to walk a better program, and accordingly the program made a walk on part of the structure of robot design; characteristics of walking robots have been studied and put forward in the pipeline so that the robot wasable to remain stable The method of operation. By the design of the robot body and the robot movement in the straight tube case study of thinking, and further verify the feasibility of the design idea.Finally, the research pipeline cleaning robot running the safety of the system performance, given the high-pressure circumstances to ensure that the basic operating system security program, for pipe cleaning robot system of the utility to provide a reliable basis.Key words: pipe robot; security; walkIII本科机械毕业设计论文CAD图纸 QQ 401339828目录摘要...................................................................... .. (I)IABSTRACT............................................................ . (III)绪论...................................................................... ........................................................................ (1)1 概述.............................................................................................................................................21.1 管道清洗机器人常见问题分析...................................................................... ..................... 2 1.2 除垢机器人理念...................................................................... ............................................. 2 1.3 基本设计任务...................................................................... ................................................. 3 1.4毕业设计的目的 ..................................................................... .............................................. 3 2.1 管道射流清洗机器人的本体设计...................................................................... .. (4)2.1.1 移动方式选择...................................................................... (4)2.1.2 传动方案的选择...................................................................... ...................................... 4 2.2 管道清洗机器人变管径自适应性方案设计.......................................................................62.3 动力系统的设计计算...................................................................... . (9)2.3.1 管道机器人行驶阻力分析...................................................................... . (9).................................................................... .......... 12 2.3.2 减速器的选择................................2.4 机器人的速度和驱动能力校核...................................................................... . (13)2.4.1 运动速度校核...................................................................... . (13)2.4.2 驱动能力校核...................................................................... ........................................ 13 3 链轮传动的设计计算...................................................................... ......................................... 153.1 链轮设计的初始条件...................................................................... ................................... 15 3.2 链轮计算结果 ..................................................................... .............................................. 15 3.3历史结果 ..................................................................... .. (16)4 蜗轮蜗杆的设计计算...................................................................... ......................................... 18 4.1 蜗轮蜗杆基本参数设计 ..................................................................... (18)4.1.1 普通蜗杆设计输入参数...................................................................... (18)4.1.2 材料及热处理...................................................................... . (19)4.1.3 蜗杆蜗轮基本参数...................................................................... .. (20)4.1.4 蜗蜗轮精度...................................................................... .. (21)4.1.5 强度刚度校核结果和参数...................................................................... .. (22)4.1.6 自然通风散热计算...................................................................................................... 22 4.2蜗杆轴的结构设计...................................................................... . (23)4.2.1 轴的强度较核计算...................................................................... .. (23)4.2.2 轴的结构设计...................................................................... . (27)4.2.3 键的校核...................................................................... ................................................ 27 5 弹簧的设计计算...................................................................... . (29)IV本科机械毕业设计论文CAD图纸 QQ 4013398286 安全性能 ..................................................................... .............................................................. 31 结论 ..................................................................... ........................................................................ .. 32 参考文献 ..................................................................... .................................................................. 34 致谢 ..................................................................... ........................................................................ .. 33V本科机械毕业设计论文CAD图纸 QQ 401339828绪论1.1本课题研究的内容和意义用于石油、天然气乃至民用上下水等管道在传输液、气体过程中,因温度、压力不同及介质与管道之间的物理化学作用,常常会高温结焦,生成油垢、水垢,存留沉积物,腐蚀物等,使有效传输管径减少,效率下降,物耗、能耗增加,工艺流程中断,设备失效,发生安全事故。
管道清灰机器人系统设计
维普资讯
第 8期 20 0 6年 8月
文章 编 号 :0 1 9 7 2 o ) 8— 15—0 10 —3 9 (0 6 0 0 2 2
机 械 设 计 与 制 造
Ma h n r De in c iey sg & Ma u a tr n f cu e —l 5一 2
2 s wla da i t c n ma as o e a af miig n a e ed o t h m h i m n hwt k p w y r s i . l s p n o e e as n e o e f d o t v e 2 K yw rsI — ie l r ga ; oo ; rc e ; ie ts h rc r t e od :n p e i s R b tT akd K nma c aat ii p can h i c e sc
管道 清灰 机器人 系统设计
张淑 珍 杨 萍 袁 晓鹏 ( 州理工 大学 机 电工程学 院 , 兰 兰州 705 ) 300
De in o n—pp la ig a h r b ts se sg fi — ie ce r s o o y t m n
Z HANG S u—z e , YA h hn NG iቤተ መጻሕፍቲ ባይዱg P n ,YUAN Xio—p n a eg
管道机器人设计—课程设计

前言 (ⅰ)目录 (ⅱ)中文摘要 (ⅲ)第一章概述 (1)1.1机器人概述 (1)1.2管道机器人概述 (3)1.3国内外管道机器人的发展 (4)1.3.1国内管道机器人的发展 (4)1.3.2国外管道机器人的发展 (6)1.4 机器人的发展景 (8)第二章总体方案的制定与比较 (10)2.1 管道机器人设计参数和技术指标 (10)2.2总体结构的设计和较 (10)第三章部件的设计和算 (15)3.1 管道机器人工作量算 (15)3.3 撑开机构和放大杆组的计 (24)第四章其他 (32)5.1 大小锥齿轮的设计和核 (32)5.2 轴Ⅰ的设计和核 (35)5.3 键的校核 (44)在工农业生产及日常生活中,管道应用范围极为广泛。
在管道的使用过程中,会产生管道堵塞与管道故障和损伤,需要定期维护、检修等。
但管道所处的环境往往是人们不易达到或者不允许人们直接进入,所以开发管道机器人就显得尤为重要。
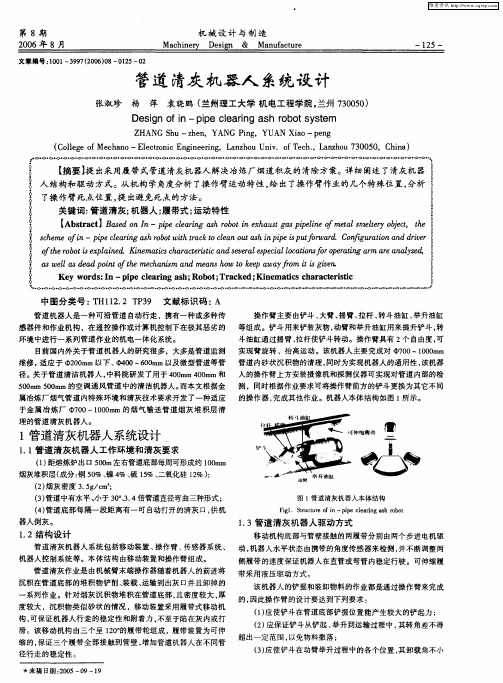
以金属冶炼厂管道清洁机器人为研究目标,根据其工作环境和技术要求设计了一种可适应φ700mm-φ1000mm管道的管道清洁机器人。
该管道机器人采用三履带式的可伸缩行走装置,操作装置为2个自由的的操作臂,末端操作器上安装有吸尘头,吸尘头吸起的灰尘通过吸尘软管收集在装灰箱体内。
当灰尘装满后,机器人行走到倒灰口,打开卸料门,将灰尘倒掉。
本次设计主要对管道清洁机器人进行结构设计,利用三维参数化特征建模软件Pro/Engineer建立了管道清洁机器人的三维模型,生成了机器人主要零部件的工程图。
对管道机器人中的主要机构进行动态仿真,验证了所设计机构的正确性。
最后对主要零部件进行了设计校核计算,并简单叙述了该机器人控制方案。
第一章概述1. 1 机器人概述机器人----这一词最早使用始于1920年至1930年期间在捷克作家凯勒尔*凯佩克(Karel capek)的名为"罗莎姆的万能机器人"的幻想剧中,一些小的人造的和拟人的傀儡绝对地服从其主人的命令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
管道清灰机器人的设计
管道清灰机器人包括移动装置、操作臂、传感器系统、机器人控制系统等。
本体结构由移动装置和操作臂组成。
管道机器人作业是由机械臂末端操作器随着机器人的前进将沉积在管道
底部的堆积物产削、装载、运输到出灰口并且卸掉的一系列作业。
移动装置采用履带式移动机构,可保证机器人行走的稳定性和附着力,不至于陷在灰内或打滑。
该移动装置由三个呈120°的履带组成,履带装置为可伸缩的,保证履带全部接触到管壁,增加管道机器人在不同管径行走的稳定性。
操作臂由铲斗、大臂、摇臂、拉杆、转斗油缸、举升油缸等组成。
铲斗用来铲装灰物,动壁和举升油缸用来提升铲斗,转斗油缸通过摇臂、拉杆使铲斗运动。
操作臂具有两个自由度,可实现臂旋转、抬高运动。
行走装置
移动装置采用履带式移动机构,可保证机器人行走的稳定性和附着力,不至于陷在灰内或打滑。
该移动装置由三个呈120°的履带组成,履带装置为可伸缩的,保证履带全部接触到管壁,增加管道机器人在不同管径行走的稳定性。
履带材料选用橡胶材料,查资料可知与钢材的摩擦系数为0.25.
履带的驱动轮,导论,支重轮,托轮的材料选用45钢,其密度为7.85g/cm*3.
车架的材料选用Q235钢,密度7.85g/cm3。
轴的材料选用45钢,密度7.85g/cm3。
履带承受操作臂,总体以及灰的重量预计50kg。
一条履带承受重力为总质量的2倍,为1000N,由公式L1=可得履带最
小接地长度L1为188mm,p是履带接地比压,取0.07,γ为比例系数,取0.2。
履带宽度 B=γ*L1,可知最小宽度为40mm。
由于管道为700-1000mm的管道,选取履带接地长度为300mm,取驱动轮和导论之间的距离为400mm,履带长度为450mm,履带宽度为100mm。
可知履带销的长度为100mm。
履带节距L2=(10~13),为60mm。
履带驱动轮的齿数为23~27,取25。
节圆半径为50mm,导论齿数20,节圆半径35mm,支重轮和托轮的齿数为10,半径为10mm。
四轮厚度为10mm。
驱动轮体积为78.54cm*3,密度为7.85g/cm*3。
质量为617g,一条履带两个驱动轮。
导轮体积为50.265cm*3,质量394.5g。
2个。
支重轮和托轮体积为12.566cm*3,质量98.64g,总共16个。
再加上车架质量,平衡装置质量,总质量为5000g。
履带承受的摩擦力F=1100*0.25=275N。
履带承受摩擦力1100N*0.25=275N。
功率W=275N*0.2m/s=55W。
电机选取100W,质量大概15kg,总质量50+5+15=70kg。
履带承受摩擦力1400*0.25=350
功率350*0.2=70W。
符合。
电机型号70SZ55.转速6000r/min,功率92W。