材料力学 静定外伸梁的剪力图和弯矩图 解题过程
梁的剪力方程和弯矩方程常用弯矩图
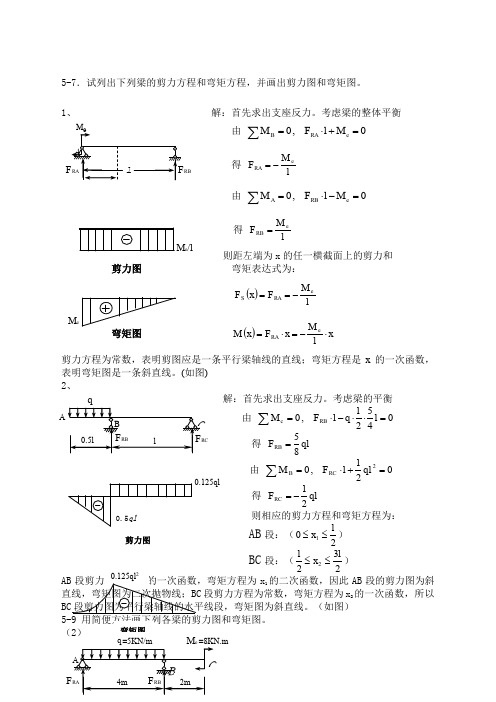
5-7.试列出下列梁的剪力方程和弯矩方程,并画出剪力图和弯矩图。
解:首先求出支座反力。
考虑梁的整体平衡由 0,0=+⋅=∑e RA B M l F M得 lM F eRA -= 由 0,0=-⋅=∑e RB A M lF M 得 lM F eRB =则距左端为x 的任一横截面上的剪力和剪力图 弯矩表达式为:()l M F x F eRA S -== ()x lM x F x M eRA ⋅-=⋅= 剪力方程为常数,表明剪图应是一条平行梁轴线的直线;弯矩方程是x 的一次函数,表明弯矩图是一条斜直线。
(如图)解:首先求出支座反力。
考虑梁的平衡 由 0452,0=⋅⋅-⋅=∑l l q l F M RB c得 ql F RB 85= 由 021,02=+⋅=∑ql l F M RC B得 ql F RC 21-=则相应的剪力方程和弯矩方程为:AB 段:(201lx ≤≤)BC 段:(2322lx l ≤≤)x 1的二次函数,因此AB 段的剪力图为斜段剪力方程为常数,弯矩方程为x 2的一次函数,所以剪力图解:由梁的平衡求出支座反力:AB段作用有均布荷载,所以AB段的剪力图为下倾直线,弯矩图为下凹二次抛物线;BC段没有荷载作用,所以BC段的剪力图为平行梁轴线的水平线段,弯矩图为直线。
在B支座处,剪力图有突变,突变值)的大大小等于集中力(支座反力FRB小;弯矩图有转折,转折方向与集中力方向一致。
(如图)(5)解:由梁的平衡求出支座反力:则其剪力为不定值,第一式的适用范围为。
由于截面B有集中力偶作用,则其弯矩也为不定值,第二式的适用范围为关于这个问题,待后面作进一步说明。
2、作剪力图和弯矩图剪力方程表明,梁各截面上的剪力都相等,因此剪力图应是一条平行于横轴的直线。
取直角坐标系x—,画出梁的剪力图为一水平直线。
因各横截面的剪力为负值,故画在横轴下面,如图(b)所示。
弯矩方程表明,弯矩M是x的一次函数,因此弯矩图应是一条倾斜直线。
材料力学第5章-剪力图与弯矩图
第5章 梁的强度问题
剪力方程与弯矩方程
建立剪力方程和弯矩方程的方法与过程,实际上与前面所 介绍的确定指定横截面上的剪力和弯矩的方法和过程是相似的 ,所不同的,现在的指定横截面是坐标为x的横截面。
需要特别注意的是,在剪力方程和弯矩方程中,x是变量, 而FQ(x)和M(x)则是x的函数。
第5章 梁的强度问题
剪力方程与弯矩方程
例题2
MO=2FPl
FP
B
A
C
l
l
悬臂梁在B、C两处分别承受集中力FP和集中力偶M=2FPl
的作用。梁的全长为2l。 试写出:梁的剪力方程和弯矩方程。
第5章 梁的强度问题
剪力方程与弯矩方程
y
MO=2FPl
O
A
C
l
FP
B l
解:1.确定控制面和分段
本例将通过考察截开截面的右
边部分平衡建立剪力方程和弯矩方 程,因此可以不必确定左端的约束 力。
本章首先介绍如何建立剪力方程和弯矩方程;讨论载荷、 剪力、弯矩之间的微分关系;怎样根据载荷、剪力、弯矩之间 的微分关系绘制剪力图与弯矩图;然后应用平衡、变形协调以 及物性关系,建立确定弯曲的应力和变形公式;最后介绍弯曲 强度设计方法。
第5章 梁的强度问题
工程中的弯曲构件 梁的内力及其与外力的相互关系 剪力方程与弯矩方程 载荷集度、剪力、弯矩之间的微分关系 剪力图与弯矩图 刚架的内力与内力图 结论与讨论(1)
根据以上分析,不难得到结论: 杆件各截面上内力变化规律随着外力的 变化而改变。
第5章 梁的强度问题
梁的内力及其与外力的相互关系
所谓剪力和弯矩变化规律是指表示剪力和弯矩变 化的函数或变化的图线。这表明,如果在两个外力 作用点之间的梁上没有其他外力作用,则这一段梁 所有横截面上的剪力和弯矩可以用同一个数学方程 或者同一图线描述。
材料力学试题及解析(2)

材料力学试题及解析(2)一、单项选择题 (共10小题,每小题2分,共20分)( )1、胡克定律适用的条件是 。
A .只适用于塑性材料;B .只适用于轴向拉伸;C .应力不超过比例极限;D .应力不超过屈服极限。
( )2、材料力学求解内力的基本方法是 。
A .截面法;B .能量法;C .叠加法;D .解析法。
( )3、材料许用应力[]/u n σσ=,式中u σ为极限应力,n 为安全系数,对于脆性..材料,u σ应该选取该材料的 。
A .比例极限p σ;B .弹性极限e σ;C .屈服极限s σ;D .强度极限b σ。
( )4、在计算螺栓连接挤压面上的挤压应力/bs bs bs F A σ=时,bs A 指 。
A .半圆柱面的面积;B .过直径且与挤压力垂直的截面面积;C .圆柱面的面积;D .横截面的面积。
( )5、切应力互等定理在 条件下成立。
A .任意应力状态;B .纯剪切应力状态;C .平面应力状态;D .空间应力状态。
( )6、一圆轴,两端受扭转力偶矩作用,若将轴的直径减小一半,则其最大切应力变为原来的 倍。
A .2;B .4;C .8 ;D .16。
( )7、左端固定的扭转轴受到外力偶作用,则轴上的最大扭矩maxT为 。
A .6kN m ⋅;B .7kN m ⋅;C .8kN m ⋅;D .9kN m ⋅。
F(第7题) (第10题)( )8、下列选项中关于梁在发生纯弯曲时横截面上应力的叙述正确的是 。
A .只有正应力,切应力为零;B .只有切应力,正应力为零;C .正应力和切应力都不为零;D .不能确定。
( )9、图示情况,按弯曲内力正负号规定,其横截面上剪力和弯矩均为正的是 。
A B .MC MD .M( )10、如图所示圆形截面细长压杆,已知横截面直径30d mm =,杆长 1.2l m =,弹性模量200E GPa =,则其的临界载荷为 。
A .218kN ;B .109kN ;C .54.5kN ;D .27.25kN 。
材料力学第五章梁的剪力图与弯矩图

29
§5-3
剪力和弯矩及其方程
为了建立剪力方程和弯矩方程,必须首先 建立Oxy坐标系。其中O为坐标原点,x坐 标轴与梁的轴线一致,坐标原点O一般取 在梁的左端,x坐标轴的正方向自左向右, y坐标轴铅垂向上。
30
§5-3
剪力和弯矩及其方程
建立剪力方程和弯矩方程,需要根据梁上的外 力(包括载荷和约束力)作用状况,确定控制 面,从而确定要不要分段,以及分几段建立剪 力方程和弯矩方程。
FBy
F 0 M 0
y A
FAy FBy 2F
FSE O FAy ME
FBy
F 5F FAy 3 3
分析右段得到:
FBy
O
ME FSE
F
FBy
y
0
FSE FBy 0
M
o
0
3a M E FBy Fa 2
27
§5-3 剪力和弯矩及其方程
F FBy 3
3、平面弯曲(对称弯曲):若梁上所有外力都作用在纵向对称面内,
梁变形后轴线形成的曲线也在该平面内的弯曲。
4、非对称弯曲:若梁不具有纵向对称面,或梁有纵向对称面上但外力
并不作用在纵向对称面内的弯曲。
13
工程实际中的弯曲问题简图
P
P P P
P P P
P
14
平面弯曲
•具有纵向对称面 •外力都作用在此面内 •弯曲变形后轴线变成对称面内的平面曲线
M M M
M
弯矩为正
弯矩为负
22
梁的控制面
集中力作用点两侧的截面
集中力偶作用点两侧的截面 集度相同的均布载荷起点和终点截面处
23
浅谈材料力学中简易法快速画梁的剪力图和弯矩图

图1外伸梁AB承受图F B=3.8kN(↑)画剪力图。
从左到右画,对于平衡问题,剪到零结束。
A截面作用有向下的集中力,所以剪力图要向下突变,从零开始,突变值3kN,AC段没有分布荷载作用,线。
C截面有向上的集中力作用,图2剪力图图3弯矩图到零结束。
A 截面是自由截面且没有集中力偶作用,所以弯矩为零。
C 截面弯矩即AC 段-3kN ·m 。
AC 段没有分布荷载,弯矩CD 段有均布荷载作用,弯矩图抛物均布荷载箭头向下,所以抛物线向下凸。
画抛个截面,分别是均布荷载的起端、末端及剪力为零处对应的弯矩值即抛物线顶点。
由剪力图可求得剪力为零处的位置,根据积分关系就能求得该处的弯矩值为1.41kN ·弯矩值为-2.2kN ·m 。
D 截面处有集中力偶作用,矩图要发生突变。
集中力偶的方向是顺时针,而下,所以弯矩图向下突变,突变值到3.8kN ·m 。
DB 段没有分布荷载作用,图是斜直线。
B 截面是铰接处,没有集中力偶作用,弯矩为零。
标明弯矩的单位及正负号总结本文以横向分布力集度与剪力、弯矩的微分关系为基础,总结归纳了几种荷载作用下剪力图和弯矩图的特征,具体讲述了如何用简易法画内利用它们之间的积分关系,可由内力图面积快速求出控制截面的内力值。
掌握这些特征,就可以不用写内力方程而根据外力直接画出相应的内力图,简单、高效。
参考文献[1]邓宗白,陶阳,吴永端.材料力学[M ].北京2013.[2]刘鸿文.材料力学(Ⅰ)[M ].北京:高等教育出版社[3]孙训方.材料力学[M ].(第5版)北京:高等教育出版社2009.. All Rights Reserved.。
材料力学-5-弯矩图与剪力图
从所得到的剪力图和 弯矩图中不难看出:
在集中力作用点两 侧截面上的剪力是不相 等的,而在集中力偶作 用处两侧截面上的弯矩 是不相等的,其差值分 别为集中力与集中力偶 的数值。
例题5
q
A
4a FAy
梁由一个固定铰链支座和一个辊轴支座所
支承,但是梁的一端向外伸出,这种梁称为外 伸梁(overhanging beam)。梁的受力以及各部 分尺寸均示于图中。
工程中的弯曲构件
工程中可以看作梁的杆件是很多的:
桥式吊车的大梁 可以简化为两端饺支 的简支梁。在起吊重 量(集中力FP)及大梁自 身重量(均布载荷q)的 作用下,大梁将发生弯 曲。
工程中可以看作梁的杆件是很多的:
石油、化工设备中各种直立式反应塔,底部与地面固定 成一体,因此,可以简化为一端固定的悬臂梁。在风力载荷 作用下,反应塔将发生弯曲变形。
Nanjing University of Technology
材料力学 课堂教学(5)
2020年8月12日
第5章 梁的弯曲问题(1)-剪力图与弯矩图
杆件承受垂直于其轴线的外力或位于其轴线所在平面内的 力偶作用时,其轴线将弯曲成曲线,这种受力与变形形式称为 弯曲(bending)。
主要承受弯曲的杆件称为梁(beam)。
得到梁的剪力方程和弯 矩方程分别为:
M(x)
FQ x=FRA qx=ql-qx 0 x 2l
FRA x
M x=qlx-qx2
0 x 2l
2
这一结果表明,梁上的剪力方程是x的线性函数;弯矩方程是x的 二次函数。
载荷集度、剪力、弯矩之间的 微分关系
绘制剪力图和弯矩图有两种方法:
第一种方法是:根据剪力方程和弯矩方程,在FQx和M-x坐标系中绘制出相应的图线,便得到所需要的 剪力图与弯矩图。
材料力学剪力图弯矩图绘制(有详细的程序)讲解
材料力学剪力图弯矩图绘制(有详细的程序)说明:输入变量:分段数组x分段点一般在集中力,集中力偶作用出和分布载荷的起末端。
载荷数组MPQ若梁上的外载荷总数为PN,则用PN行四列的数组MPQ储存载荷,数组MPQ第一列代表载荷的类型:1为集中力偶,2为集中力,3为分布载荷,第二列代表载荷的大小,第三列代表集中力,集中力偶或者分布载荷左端与简支梁左端的距离,第四列代表均匀载荷右端与简支梁左端的距离,当载荷为集中力或者集中力偶时,第四列为0.符号规定集中力和均匀载荷向下为正,向上为负,集中力偶顺时针为正,逆时针为负。
输出变量:内力数组XQM如果梁被分为NN-1段,则内力数组XQM为NN行,三列的数组,第一列代表梁的横截面的位置,第二列代表剪力,第三列代表弯矩。
剪力极值及位置QDXQDX是一个二行二列的数组,第一列代表极值所在的位置,第二列代表极值弯矩极值及位置MDXMDX是一个二行二列的数组,第一列代表极值所在的位置,第二列代表极值1.子程序1.1集中力偶对弯矩贡献的子函数QMM1.2集中力对剪力和弯矩贡献的子函数QMP1.3分布载荷对剪力和弯矩贡献的子函数QMQ1.4求剪力和弯矩极值的子函数MAX_MIN1.5绘制剪力图和弯矩图的子函数TU_QM2.计算分析程序2.1简支梁QMDJ2.2左端固定悬臂梁QMDXZ2.3右端固定悬臂梁QMDXY2.4左端外伸梁QMDWZ2.5右端外伸梁QMDWY2.6两端外伸梁QMDWL1.子程序1.1集中力偶对弯矩贡献的子函数QMMfunction MM=QMM(n,x1,a,M,MM)for j=1:nif x1(j)==an1=j;endendMM(n1:n)=MM(n1:n)+M;1.2集中力对剪力和弯矩贡献的子函数QMP function [QQ,MM]=QMP(n,x1,b,P,QQ,MM)for j=1:nif x1(j)==b;n1=j;endendQQ(n1:n)=QQ(n1:n)-P;MM(n1:n)=MM(n1:n)-P*(x1(n1:n)-b);1.3分布载荷对剪力和弯矩贡献的子函数QMQ function [QQ,MM]=QMQ(n,x1,c,d,q,QQ,MM)for j=1:nif x1(j)>cQQ(j)=QQ(j)-q*(x1(j)-c);MM(j)=MM(j)-0.5*q*(x1(j)-c)^2;endif x1(j)>dQQ(j)=QQ(j)+q*(x1(j)-d);MM(j)=MM(j)+0.5*q*(x1(j)-d)^2;endend1.4求剪力和弯矩极值的子函数MAX_MINfunction [QDX,MDX,XQM]=MAX_MIN(x1,QQ,MM) XQM=[x1',QQ',MM'];[Qmax,i]=max(QQ);Q1=[Qmax,x1(i)];[Qmin,i]=min(QQ);Q2=[Qmin,x1(i)];[Mmax,i]=max(MM);M1=[Mmax,x1(i)];[Mmin,i]=min(MM);M2=[Mmin,x1(i)];disp('剪力极值及位置')QDX=[Q1;Q2]disp('弯矩极值及位置')MDX=[M1;M2]t1=findobj(0,'Tag','text31');str=num2str(Q1(1));set(t1,'String',str);t2=findobj(0,'Tag','text39');str=num2str(Q1(2));set(t2,'String',str);t3=findobj(0,'Tag','text32');str=num2str(Q2(1));set(t3,'String',str);t4=findobj(0,'Tag','text40');str=num2str(Q2(2));set(t4,'String',str);m1=findobj(0,'Tag','text33');str=num2str(M1(1));set(m1,'String',str);m2=findobj(0,'Tag','text41');str=num2str(M1(2));set(m2,'String',str);m3=findobj(0,'Tag','text34');str=num2str(M2(1));set(m3,'String',str);m4=findobj(0,'Tag','text42');str=num2str(M2(2));set(m4,'String',str);1.5绘制剪力图和弯矩图的子函数TU_QM function TU_QM(x1,QQ,MM)h1=findobj(0,'Tag','axes1');axes(h1);plot(x1,QQ);grid;title('剪力图');h2=findobj(0,'Tag','axes2');axes(h2);plot(x1,MM);grid;title('弯矩图');2.计算分析程序2.1简支梁QMDJfunction XQM=QMDJ(x,MPQ)[n,m]=size(x);L=x(m);x1=[];for i=1:m-1x1=[x1,linspace(x(i),x(i+1),50)];endMM=zeros(size(x1));QQ=zeros(size(x1));[m,t]=size(MPQ);[t,n]=size(x1);for i=1:mswitch MPQ(i,1)case 1M=MPQ(i,2);a=MPQ(i,3);RA=-M/L;QQ=QQ+RA;MM=MM+RA*x1;if a>0 & a<LMM=QMM(n,x1,a,M,MM);endif a==0MM=MM+M;endcase 2P=MPQ(i,2);b=MPQ(i,3);RA=(L-b)*P/L;if b>0 & b<LQQ=QQ+RA;MM=MM+RA*x1;[QQ,MM]=QMP(n,x1,b,P,QQ,MM);endcase 3q=MPQ(i,2);c=MPQ(i,3);d=MPQ(i,4);RA=(L-0.5*(c+d))*q*(d-c)/L;QQ=QQ+RA;MM=MM+RA*x1+MA;[QQ,MM]=QMQ(n,x1,c,d,q,QQ,MM);endend[QDX,MDX,XQM]=MAX_MIN(x1,QQ,MM);TU_QM(x1,QQ,MM);disp('梁的有限元分析结果')disp('位置-----------剪力----------弯矩')2.2左端固定悬臂梁QMDXZfunction XQM=QMDXZ(x,MPQ)[n,m]=size(x);L=x(m);x1=[];for i=1:m-1x1=[x1,linspace(x(i),x(i+1),50)];endMM=zeros(size(x1));QQ=zeros(size(x1));[PN,t]=size(MPQ);[t,n]=size(x1);for i=1:PNswitch MPQ(i,1)case 1M=MPQ(i,2);a=MPQ(i,3);if a>0 & a<LMM=MM-M;MM=QMM(n,x1,a,M,MM);endif a==LMM=MM-M;endcase 2P=MPQ(i,2);b=MPQ(i,3);RA=P;MA=-P*b;QQ=QQ+RA;MM=MM+RA*x1+MA;if b>0 & b<L[QQ,MM]=QMP(n,x1,b,P,QQ,MM);endcase 3q=MPQ(i,2);c=MPQ(i,3);d=MPQ(i,4);RA=q*(d-c);MA=-0.5*q*(d-c)*(d+c);QQ=QQ+RA;MM=MM+RA*x1+MA;[QQ,MM]=QMQ(n,x1,c,d,q,QQ,MM);endend[QDX,MDX,XQM]=MAX_MIN(x1,QQ,MM);TU_QM(x1,QQ,MM);disp('梁的有限元分析结果')disp('位置-----------剪力----------弯矩')2.3右端固定悬臂梁QMDXYfunction XQM=QMDXY(x,MPQ)[n,m]=size(x);L=x(m);x1=[];for i=1:m-1x1=[x1,linspace(x(i),x(i+1),50)];endMM=zeros(size(x1));QQ=zeros(size(x1));[PN,t]=size(MPQ);[t,n]=size(x1);for i=1:PNswitch MPQ(i,1)case 1M=MPQ(i,2);a=MPQ(i,3);if a==0MM=MM+M;endif a>0 & a<LMM=QMM(n,x1,a,M,MM);endcase 2P=MPQ(i,2);b=MPQ(i,3);if b==0QQ=QQ-PMM=MM-P*x1;endif b>0 & b<L[QQ,MM]=QMP(n,x1,b,P,QQ,MM);endcase 3q=MPQ(i,2);c=MPQ(i,3);d=MPQ(i,4);[QQ,MM]=QMQ(n,x1,c,d,q,QQ,MM);endend[QDX,MDX,XQM]=MAX_MIN(x1,QQ,MM);TU_QM(x1,QQ,MM);disp('梁的有限元分析结果')disp('位置-----------剪力----------弯矩')2.4左端外伸梁QMDWZfunction XQM=QMDWZ(x,L1,MPQ)[n,m]=size(x);L=x(m);x1=[];for i=1:m-1x1=[x1,linspace(x(i),x(i+1),50)];endMM=zeros(size(x1));QQ=zeros(size(x1));[PN,t]=size(MPQ);[t,n]=size(x1);for i=1:PNswitch MPQ(i,1)case 1M=MPQ(i,2);a=MPQ(i,3);if a>0 & a<LMM=QMM(n,x1,a,M,MM);endif a==0MM=MM+M;endcase 2P=MPQ(i,2);b=MPQ(i,3);RA=P*(L-b)/(L-L1);[QQ,MM]=QMP(n,x1,L1,-RA,QQ,MM);if b>0 & b<L[QQ,MM]=QMP(n,x1,b,P,QQ,MM);endif b==0QQ=QQ-P;MM=MM-P*x1;endcase 3q=MPQ(i,2);c=MPQ(i,3);d=MPQ(i,4);b=(c+d)*0.5;P=(d-c)*q;RA=P*(L-b)/(L-L1);[QQ,MM]=QMP(n,x1,L1,-RA,QQ,MM);[QQ,MM]=QMQ(n,x1,c,d,q,QQ,MM);endend[QDX,MDX,XQM]=MAX_MIN(x1,QQ,MM);TU_QM(x1,QQ,MM);disp('梁的有限元分析结果')disp('位置-----------剪力----------弯矩')2.5右端外伸梁QMDWYfunction XQM=QMDWY(x,L1,MPQ)[n,m]=size(x);L=x(m);x1=[];for i=1:m-1x1=[x1,linspace(x(i),x(i+1),50)];endMM=zeros(size(x1));QQ=zeros(size(x1));[PN,t]=size(MPQ);[t,n]=size(x1);for i=1:PNswitch MPQ(i,1)case 1M=MPQ(i,2);a=MPQ(i,3);RA=-M/L1;RB=-RA;QQ=QQ+RA;MM=MM+x1*RA;if a>0 & a<LMM=QMM(n,x1,a,M,MM);endif a==0MM=MM+M;endcase 2P=MPQ(i,2);b=MPQ(i,3);RA=P*(L1-b)/L1;RB=P*b/L1;QQ=QQ+RA;MM=MM+x1*RA;[QQ,MM]=QMP(n,x1,L1,-RB,QQ,MM);if b>0 & b<L[QQ,MM]=QMP(n,x1,b,P,QQ,MM);endif b==0QQ=QQ-P;MM=MM-P*x1;endcase 3q=MPQ(i,2);c=MPQ(i,3);d=MPQ(i,4);b=(c+d)*0.5;P=(d-c)*q;RA=P*(L1-b)/L1;RB=P*b/L1;QQ=QQ+RA;MM=MM+x1*RA;[QQ,MM]=QMP(n,x1,L1,-RB,QQ,MM);[QQ,MM]=QMQ(n,x1,c,d,q,QQ,MM);endend[QDX,MDX,XQM]=MAX_MIN(x1,QQ,MM);TU_QM(x1,QQ,MM);disp('梁的有限元分析结果')disp('位置-----------剪力----------弯矩')2.6两端外伸梁QMDWLfunction XQM=QMDWL(x,L1,L2,MPQ)[n,m]=size(x);L=x(m);x1=[];for i=1:m-1x1=[x1,linspace(x(i),x(i+1),50)];endMM=zeros(size(x1));QQ=zeros(size(x1));[PN,t]=size(MPQ);[t,n]=size(x1);for i=1:PNswitch MPQ(i,1)case 1M=MPQ(i,2);a=MPQ(i,3);RA=-M/(L2-L1);RB=-RA;if a>0 & a<LMM=QMM(n,x1,a,M,MM);endif a==0MM=MM+M;endcase 2P=MPQ(i,2);b=MPQ(i,3);LL=L2-L1;bb=b-L1;RA=P*(LL-bb)/LL;RB=P*bb/LL;[QQ,MM]=QMP(n,x1,L1,-RA,QQ,MM);[QQ,MM]=QMP(n,x1,L2,-RB,QQ,MM);if b>0 & b<L[QQ,MM]=QMP(n,x1,b,P,QQ,MM);endif b==0QQ=QQ-P;MM=MM-P*x1;endcase 3q=MPQ(i,2);c=MPQ(i,3);d=MPQ(i,4);b=(c+d)*0.5;P=(d-c)*q;LL=L2-L1;bb=b-L1;RA=P*(LL-bb)/LL;RB=P*bb/LL;[QQ,MM]=QMP(n,x1,L1,-RA,QQ,MM);[QQ,MM]=QMP(n,x1,L2,-RB,QQ,MM);[QQ,MM]=QMQ(n,x1,c,d,q,QQ,MM);endend[QDX,MDX,XQM]=MAX_MIN(x1,QQ,MM);TU_QM(x1,QQ,MM);disp('梁的有限元分析结果')disp('位置-----------剪力----------弯矩')untitled.mfunction varargout = untitled(varargin)% UNTITLED M-file for untitled.fig% UNTITLED, by itself, creates a new UNTITLED or raises the existing% singleton*.%% H = UNTITLED returns the handle to a new UNTITLED or the handle to% the existing singleton*.%% UNTITLED('CALLBACK',hObject,eventData,handles,...) calls the local% function named CALLBACK in UNTITLED.M with the given input arguments. %% UNTITLED('Property','Value',...) creates a new UNTITLED or raises the% existing singleton*. Starting from the left, property value pairs are% applied to the GUI before untitled_OpeningFunction gets called. An% unrecognized property name or invalid value makes property application% stop. All inputs are passed to untitled_OpeningFcn via varargin.%% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one% instance to run (singleton)".%% See also: GUIDE, GUIDA TA, GUIHANDLES% Edit the above text to modify the response to help untitled% Last Modified by GUIDE v2.5 03-Jun-2008 23:12:06% Begin initialization code - DO NOT EDITgui_Singleton = 1;gui_State = struct('gui_Name', mfilename, ...'gui_Singleton', gui_Singleton, ...'gui_OpeningFcn', @untitled_OpeningFcn, ...'gui_OutputFcn', @untitled_OutputFcn, ...'gui_LayoutFcn', [] , ...'gui_Callback', []);if nargin && ischar(varargin{1})gui_State.gui_Callback = str2func(varargin{1});endif nargout[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:}); elsegui_mainfcn(gui_State, varargin{:});end% End initialization code - DO NOT EDIT% --- Executes just before untitled is made visible.function untitled_OpeningFcn(hObject, eventdata, handles, varargin) % This function has no output args, see OutputFcn.% hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDA TA) % varargin command line arguments to untitled (see V ARARGIN)% Choose default command line output for untitledhandles.output = hObject;% Update handles structureguidata(hObject, handles);% UIWAIT makes untitled wait for user response (see UIRESUME) % uiwait(handles.figure1);% --- Outputs from this function are returned to the command line. function varargout = untitled_OutputFcn(hObject, eventdata, handles) % varargout cell array for returning output args (see V ARARGOUT); % hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDA TA)% Get default command line output from handles structure varargout{1} = handles.output;function edit2_Callback(hObject, eventdata, handles)% hObject handle to edit2 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDA TA)% Hints: get(hObject,'String') returns contents of edit2 as text% str2double(get(hObject,'String')) returns contents of edit2 as a double% --- Executes during object creation, after setting all properties.function edit2_CreateFcn(hObject, eventdata, handles)% hObject handle to edit2 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles empty - handles not created until after all CreateFcns called% Hint: edit controls usually have a white background on Windows.% See ISPC and COMPUTER.if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white');endfunction edit3_Callback(hObject, eventdata, handles)% hObject handle to edit3 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDA TA)% Hints: get(hObject,'String') returns contents of edit3 as text% str2double(get(hObject,'String')) returns contents of edit3 as a double% --- Executes during object creation, after setting all properties.function edit3_CreateFcn(hObject, eventdata, handles)% hObject handle to edit3 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles empty - handles not created until after all CreateFcns called% Hint: edit controls usually have a white background on Windows.% See ISPC and COMPUTER.if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white');endfunction edit4_Callback(hObject, eventdata, handles)% hObject handle to edit4 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDA TA)% Hints: get(hObject,'String') returns contents of edit4 as text% str2double(get(hObject,'String')) returns contents of edit4 as a double% --- Executes during object creation, after setting all properties.function edit4_CreateFcn(hObject, eventdata, handles)% hObject handle to edit4 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles empty - handles not created until after all CreateFcns called% Hint: edit controls usually have a white background on Windows.% See ISPC and COMPUTER.if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white');end% --- Executes on selection change in popupmenu1.function popupmenu1_Callback(hObject, eventdata, handles)% hObject handle to popupmenu1 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)% Hints: contents = get(hObject,'String') returns popupmenu1 contents as cell array% contents{get(hObject,'Value')} returns selected item from popupmenu1% --- Executes during object creation, after setting all properties.function popupmenu1_CreateFcn(hObject, eventdata, handles)% hObject handle to popupmenu1 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles empty - handles not created until after all CreateFcns called% Hint: popupmenu controls usually have a white background on Windows.% See ISPC and COMPUTER.if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor')) set(hObject,'BackgroundColor','white');end% --- Executes on button press in pushbutton3.function pushbutton3_Callback(hObject, eventdata, handles)% hObject handle to pushbutton3 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDA TA)x=str2num(get(handles.edit2,'string'));MPQ=str2num(get(handles.edit3,'string'));L=str2num(get(handles.edit4,'string'));L1=L(1);L2=L(2);val=get(handles.popupmenu1,'Value');str=get(handles.popupmenu1,'String');switch str{val}case '简支梁'QMDJ(x,MPQ)case '左端固定悬臂梁'QMDXZ(x,MPQ)case '右端固定悬臂梁'QMDXY(x,MPQ)case '左端外伸梁'QMDWZ(x,L1,MPQ)case '右端外伸梁'QMDWY(x,L1,MPQ)case '两端外伸梁'QMDWL(x,L1,L2,MPQ)end% --- Executes on button press in pushbutton4.function pushbutton4_Callback(hObject, eventdata, handles)% hObject handle to pushbutton4 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) close all% --- Executes on key press over popupmenu1 with no controls selected. function popupmenu1_KeyPressFcn(hObject, eventdata, handles)% hObject handle to popupmenu1 (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDA TA)。
静定梁的弯矩
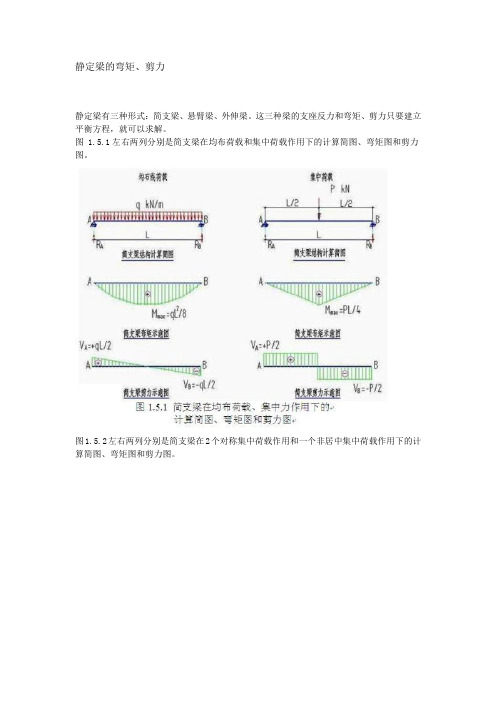
静定梁的弯矩、剪力
静定梁有三种形式:简支梁、悬臂梁、外伸梁。
这三种梁的支座反力和弯矩、剪力只要建立平衡方程,就可以求解。
图 1.5.1左右两列分别是简支梁在均布荷载和集中荷载作用下的计算简图、弯矩图和剪力图。
图1.5.2左右两列分别是简支梁在2个对称集中荷载作用和一个非居中集中荷载作用下的计算简图、弯矩图和剪力图。
图1.5.3左右两列分别是悬臂梁在均布荷载作用和一个端点集中荷载作用下的计算简图、弯矩图和剪力图。
图1.5.4左右两列分别是外伸梁在集中荷载均布荷载作用和均布荷载作用下的计算简图、弯
矩图和剪力图。
从图1.5.1~图1.5.4,我们看到,正确的弯矩图和正确的剪力图之间有如下对应关系:每个区段从左到右,弯矩下坡,剪力为正;弯矩上坡,剪力为负;弯矩为水平线时,对应区段的剪力为零;在均布荷载作用下,剪力为零所对应的截面,弯矩最大;在集中荷载作用下,弯矩最大值一般在集中荷载作用点,该点的剪力有突变,突变的绝对值之和等于集中荷载的大小。
如果不满足这个对应关系,那么弯矩图和剪力图必有一个画错了,或者两个全不对。
多跨连续梁是超静定梁,单单用平衡方程不能求解,还需要“变形协调条件”才能解联立方程进行求解。
图1.5.5是某多跨连续梁在均布荷载力作用下的变形简图、受力钢筋配置区域和弯矩图示意图。
负弯矩表示截面的上翼缘受拉、下翼缘受压;正弯矩表示截面下翼缘受拉、上翼缘受压;反弯点截面,该点弯矩等于零,在这个截面,上下截面既不受压,也不受拉。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
画出下面梁的剪力图和弯矩图。
1.问题分析:属于受集中力、均布力的外伸梁,静定梁。
2.将A点的固定支座去掉,以F AX、F Ay代替支座反力。
将B点的滑动支座去掉,以F B代替支座反力,如下图所示。
利用静力平衡方程求解如下:
∑F x=0,得出:F AX=0(1)
∑F Y=0,得出:F AY+F B=30+20×2+40(2)
∑M B=0,得出:−30×6+F AY×4−20×2×1+40×2=0(3)
由方程(1)、(2)、(3)解得:F AY=35kN,F B=75kN
3.剪力图
求解出未知的支座反力后,梁的受力如下图所示。
如果认为剪力比较简单,可直接画出剪力图。
如果直接画出有些困难,可以分段列出梁的剪力方程,根据每段的剪力方程,分段画出剪力图。
剪力的正负按照“左上右下,剪力为正”来判断。
剪力
方程如下:
CA段:F s1=−30kN 0<x≤2
AE段:F s2=−30+35=5kN2≤x≤4
EB段:F s3=−30+35−20×(x−4)=−20x+854≤x≤6当x=6时,F s3=−35kN
BD段:F s4=−30+35−20×2+75=40kN6<x≤8
4.弯矩图
如果认为弯矩比较简单,可直接画出弯矩图。
如果直接画出有些困难,可以分段列出梁的弯矩方程,根据每段的弯矩方程,分段画出弯矩图。
弯矩的正负按照“左顺右逆,弯矩为正”来判断。
弯矩方程如下:
CA段:M1=−30x0<x≤2当x=2时,M1=−60kNm
AE段:M2=−30x+35(x−2)=5x−702≤x≤4当x=4时,M2=−50kNm
EB段:M3=−30x+35(x−2)−20×(x−4)×x−4
2
=−10x2+85x−2304≤x≤6对上式求“最大值点”,以便画弯矩图。
当x=4.25时,M3max=−49.375kNm
BD段:M4=−30x+35(x−2)−20×2×(x−5)+75×(x−6)
=40x−3206<x≤8
此段的弯矩图也可由右侧的剪力直接画出。
剪力图和弯矩图如下图所示。