不完全缓和曲线测量公式
不完全缓和曲线测量公式(正确公式)

检修井及井盖施工方案概述本文档旨在提供一份针对检修井及井盖施工的完整方案。
该方案包括施工流程、安全措施以及质量保证措施,以确保施工顺利进行并达到预期目标。
施工流程1. 检查现场- 检查井盖的损坏情况,并评估是否需要更换- 清理井口周围的杂物和污垢2. 拆除井盖- 使用适当工具将井盖拆除,并确保拆除过程中不会对周围环境造成损害3. 检修井内设施- 检查井内设施的状态,如井壁、梯子等- 进行清理、维修或更换必要的设施4. 井盖安装- 使用适当的方法和工具进行井盖的安装- 确保井盖与井口紧密贴合,并能够承受相应的荷载5. 完善周围环境- 清理施工现场的杂物和垃圾- 修复可能因施工而造成的损坏安全措施1. 人员安全- 所有参与施工的人员必须接受必要的安全培训,并按照相关规定佩戴个人防护装备- 设置警示标志,确保他人不会误入施工区域2. 设备使用安全- 选用符合安全标准的工具和设备,确保其正常运转并避免事故发生- 定期检查和维护施工所需设备,确保其正常状态3. 施工环境安全- 清理施工区域的杂物和障碍物,确保安全通行- 避免在恶劣天气条件下进行施工质量保证措施1. 施工方案的制定- 精确制定详细的施工方案,涵盖施工流程、材料选用、质量验收标准等内容- 与相关专业人员进行讨论和审核,确保方案的科学性和可行性2. 材料质量控制- 选用符合国家标准的材料,并严格把关供应商的质量管理体系- 对进场材料进行检验和验收,确保其质量符合要求3. 施工质量监控- 设立专门的监控人员,对施工过程进行监控和记录- 定期进行质量检查,发现问题及时整改总结通过本方案的实施,我们可以保证检修井及井盖施工的质量和安全,提升施工效率,确保施工达到预期目标。
在施工过程中,我们将严格遵守安全措施,并严格把关施工质量,以确保项目的成功完成。
完整及不完整缓和曲线
转载自测量空间!本帖最后由 wenyajun 于 2010-9-30 16:30 编辑关于不同类型缓和曲线的起点、终点曲率半径判断方法目前在匝道或线路施工坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,其实问题出于该缓和曲线是否是完整缓和曲线引起的。
关于这点,相关的课本教材上没有明确的讲述,网上对此问题的解释也是散见于不同的论文著作中,对于测量新手来说,线元法程序是非常适用上手的,但却往往因为遇到不完整缓和曲线的起点或终点的半径判断计算不出来导致坐标计算错误,的确是件令人恼火的事情,在此我就把自己的判断经验做一论述,给用线元法程序的测友们一同分享,当然高手们请一笑而过,也可留下你的经验与大家一起分享交流学习。
第一:先说说完整缓和曲线和不完整缓和曲线以及不对称缓和曲线与对称缓和曲线的概念问题,以免混为一谈.1.当对于单独一段缓和曲线从其完整与否来讲是分为完整与不完整两类;当对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言)又有对称缓和曲线与不对称缓和曲线之分。
由此看来,完整与对称与否是针对缓和曲线两个方面来看待区分的。
2.缓和曲线我们的测量教材上讲述的其实就是完整缓和曲线,也可以知道缓和曲线上:各个点的半径是不同的,起点到终点的半径值过度是从正无穷大到所接圆曲线半径之过度如从ZH向HY方向;或者是从所接圆曲线半径值向正无穷大过度的,如从YH向HZ方向。
那么由此可以不难判断出来,完整缓和曲线就是符合上述特征的,那么不完整的缓和曲线就是不符合上述特征的,但是线路上的平曲线设计时候一般缓和曲线不单独存在的,整体上缓和曲线前或后一般都是要连接一个圆曲线的,那么不完整缓和曲线其实就是在完整缓和曲线上截取的一段,一般就是去掉了半径无穷大的那端而是从某个点开始的半径值向所接圆曲线半径值过度的。
匝道等不完整缓和曲线计算解释和说明

匝道等不完整缓和曲线坐标计算随着全站仪在道路工程施工测量中的普及,传统的中线放样方法逐渐被淘汰。
目前道路工程中线放样时,只要能计算出中线上任意一点的坐标,用全站仪或者GPS RTK的坐标放样功能就可很方便、快捷地完成实地放样。
道路线形是由直线、圆曲线、缓和曲线三种线形组合而成的,而直线与圆曲线组合的线形(见图一)中桩坐标计算比较简单,在此不作阐述。
下面就缓和曲线与其它两种线形组合的线形中桩坐标计算予以分析。
缓和曲线与其它两种线形组合构成的线形主要有缓和曲线的完整形(即基本形)(见图二)和非完整形(即卵形)(见图三)二种。
一、基本形曲线中桩坐标计算:1、对于第一缓和曲线及圆曲线段(ZH~YH)(如图四),建立以ZH为坐标原点,切线方向为X′轴,半径方向为Y′轴的曲线坐标系(X′O′Y′)。
先计算曲线各点在曲线坐标系下的坐标。
⑴对于第一缓和曲线段(ZH~HY)内任一点i(此时L=Ki-KZH)若圆曲线半径R≥100m时,则X i ′=L-L5/(40R2Ls12) 公式①Y i ′=L3/(6RLs1) 公式②若圆曲线半径R<100m时,则X′=L-L5÷[40(RLS )2]+L9÷[3456(RLS)4]–L13÷[599040(RLS)6]+L17÷[175472640(RLS )8]- L21÷[7.80337152×1010(RLS)10](公式③)Y′=L3÷[6(RLS )] - L7÷[336(RLS)3]+L11÷[42240(RLS)5] - L15÷[9676800(RLS )7]+L19÷[3530096640(RLS)9] - L23÷[1.8802409472×1012(RLS)11](公式④)⑵对于圆曲线段(HY~YH)上任一点iX i ′=q+Rsin¢iY i ′=R(1-cos¢i)+pL=Ki-KZH¢i=(L- Ls1)*180/(Rπ)+β内移值P=Ls12/(24R)切线增值q= Ls1/2- Ls13/(240R2)综合⑴、⑵,根据不同坐标系的相互转换,可得ZH~YH上任一点i的中桩测量坐标为:X i =XZH+cosA×Xi′-sinA×f×Yi′(公式⑤)Y i = YZH+sinA×Xi′+cosA×f×Yi′(公式⑥)式中f为线路的转向系数,右转时f=1,左转时f=-1 。
不完整缓和曲线的大地坐标计算
第5期(总第144期)2001年10月山西交通科技SHANX I SC IENCE &TECHNOLOG Y OF COMM UN I CAT I ONS No .5Oct.收稿日期:2001206228;修回日期:2001209201作者简介:武胜兵(1969- ),男,山西清徐人,副主任,工程师,1991年西安公路学院本科毕业。
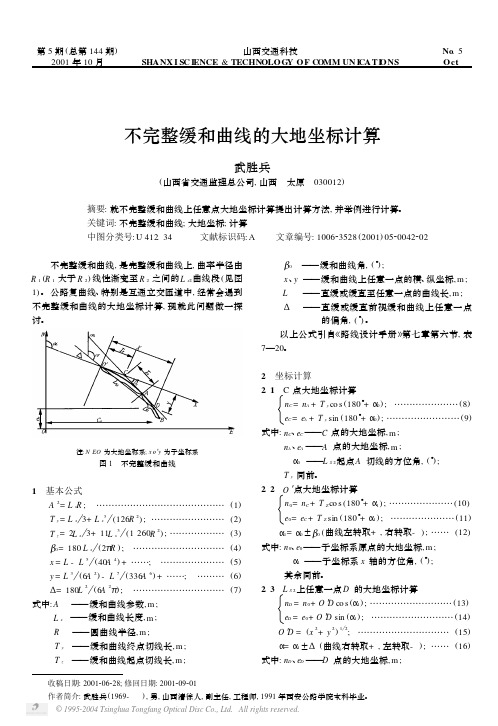
不完整缓和曲线的大地坐标计算武胜兵(山西省交通监理总公司,山西 太原 030012) 摘要:就不完整缓和曲线上任意点大地坐标计算提出计算方法,并举例进行计算。
关键词:不完整缓和曲线;大地坐标;计算中图分类号:U 412.34 文献标识码:A 文章编号:100623528(2001)0520042202 不完整缓和曲线,是完整缓和曲线上,曲率半径由R 1(R 1大于R2)线性渐变至R 2之间的L s 2曲线段(见图1)。
公路复曲线、特别是互通立交匝道中,经常会遇到不完整缓和曲线的大地坐标计算,现就此问题做一探讨。
注:N EO 为大地坐标系;x o ′y 为子坐标系图1 不完整缓和曲线1 基本公式A 2=L s R ;(1)……………………………………T y =L s3+L s 3 (126R 2);(2)……………………T z =2L s3+11L s 3 (1260R 2);(3)………………Β0=180L s (2ΠR );(4)…………………………x =L -L 5(40A 4)+……;(5)…………………y =L 3(6A 2)-L 7 (336A 6)+……;(6)………∃=180L 2(6A 2Π);(7)…………………………式中:A ——缓和曲线参数,m ;Ls——缓和曲线长度,m ;R ——圆曲线半径,m ;T y ——缓和曲线终点切线长,m ;T z——缓和曲线起点切线长,m ;Β0 ——缓和曲线角,(°);x 、y ——缓和曲线上任意一点的横、纵坐标,m ;L ——直缓或缓直至任意一点的曲线长,m ;∃ ——直缓或缓直前视缓和曲线上任意一点的偏角,(°)。
非对称非完整缓和曲线推算公式
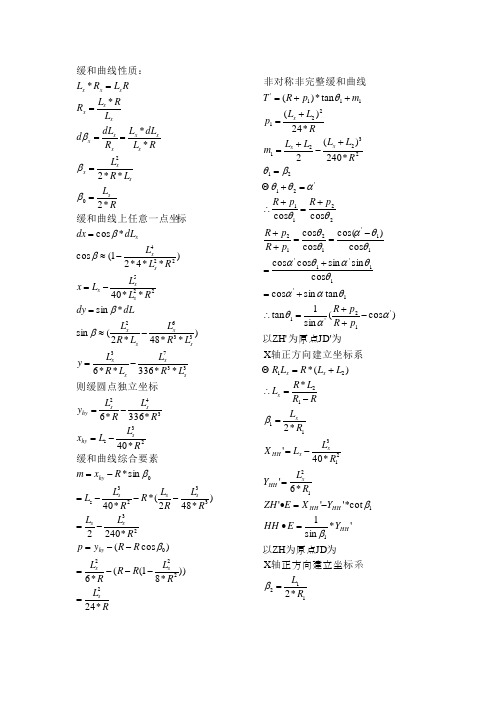
RL R L R R R L R R y p R L L R L R L R R L L R x m R L L x R L R L y L R L L R L y L R L L R L dLdy R L L L x R L L dL dx RL L R L RL dL L R dL d L R L R R L R L s s s hy ss ss s hy shy ss hy s xs x s xs x s xx s xxs sxx s xx x x x xs x s x x *24))*81((*6)cos (*2402)*482(**40sin **40*336*6**336**6)**48*2(sin *sin **40)**4*21(cos *cos *2**2****22220233323s 023s 3423373336222522402=---=--=-=---=-=-=-=-=-≈=-=-≈=======βββββββββ缓和曲线综合要素则缓圆点独立坐标标缓和曲线上任意一点坐缓和曲线性质:1121112213111221'12'11'11'1'11'12122211'212123221221111'*2轴正方向建立坐标系X 为JD 为原点ZH 以'*sin 1cot '*''*6'*40'*2*)(*轴X 为JD'为原点ZH'以)cos (sin 1tan tan sin cos cos sin sin cos cos cos )cos(cos cos cos cos *240)(2*24)(tan *)(R L Y E HH Y X E ZH R L Y R L L X R L RR L R L L L R L R p R p R p R p R p R p R R L L L L m RL L p m p R T HH HH HH xHH xx HH x x x x x x x ==∙-=∙=-==-=∴+=-++=∴+=+=-==+++=+∴=+=+-+=+=++=ββββααθθααθθαθαθθαθθθθαθθβθθ 正方向建立坐标系非对称非完整缓和曲线JDA A ZH T AF JD A E HH EF A HH AF E JD EF E ZH JD ZH E JD R L L Y A HH Y X A ZH R L Y R L L X x HHHH HH HH HH∙+∙=∴=∙∙-+∙=∙=∙-∙=∙--=-=-=-=-=∴+==∙-=∙=-=3664'''236354112155212212121311sin sin *中F -JD -A 在三角形sin sin *'||||'中F -JD'-E 在三角形*2*sin 1cot **6*40ββββββπβαπββαβββββββββ 改正数切线标高设计标高改正值:里程差为任一点与起点或终点)(变坡点标高切线标高设计标高变坡点高程又变坡点竖曲线起点±==-±=-==∴-==∴===-=Rx y x i x T TK E R E R E R L T R T E i i *2*K *88*2*2*2竖曲线222221ωωωω。
圆曲线、缓和曲线、竖曲线、非完整缓和曲线计算程序
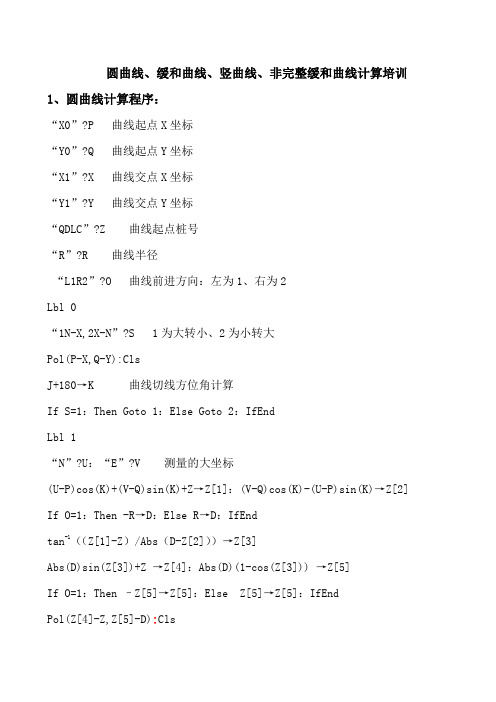
圆曲线、缓和曲线、竖曲线、非完整缓和曲线计算培训1、圆曲线计算程序:“X0”?P 曲线起点X坐标“Y0”?Q 曲线起点Y坐标“X1”?X 曲线交点X坐标“Y1”?Y 曲线交点Y坐标“QDLC”?Z 曲线起点桩号“R”?R 曲线半径“L1R2”?O 曲线前进方向:左为1、右为2Lbl 0“1N-X,2X-N”?S 1为大转小、2为小转大Pol(P-X,Q-Y):ClsJ+180→K 曲线切线方位角计算If S=1:Then Goto 1:Else Goto 2:IfEndLbl 1“N”?U:“E”?V 测量的大坐标(U-P)cos(K)+(V-Q)sin(K)+Z→Z[1]:(V-Q)cos(K)-(U-P)sin(K)→Z[2] If O=1:Then -R→D:Else R→D:IfEndtan-1((Z[1]-Z)/Abs(D-Z[2]))→Z[3]Abs(D)sin(Z[3])+Z →Z[4]:Abs(D)(1-cos(Z[3])) →Z[5]If O=1:Then –Z[5]→Z[5]:Else Z[5]→Z[5]:IfEndPol(Z[4]-Z,Z[5]-D):ClsJ+180 →Z[6]Z+Z[3](Abs(D)π)/180→Z[7](Z[1]-Z[4])cos(Z[6])+(Z[2]-Z[5])sin(Z[6]) →Z[8]If O=1:Then –Z[8]→Z[8]:Else Z[8]→Z[8]:IfEnd“X=”:Z[7]◢计算后的X小坐标“Y=”:Z[8]◢计算后的X小坐标Goto 0Lbl 2“X”?U:“Y”?V 测量的小坐标180(U-Z)/(Rπ)→Z[1]:Rsin(Z[1])+Z→Z[2]:R(1-cos(Z[1]))→Z[3]If O=1:Then –Z[3]→Z[3]:–V→C:–R→D:Else Z[3]→Z[3]:V→C:R→D:IfEnd Pol(Z[2]-Z,Z[3]-D):ClsJ+180→Z[4]Z[2]+Ccos(Z[4])→Z[5]:Z[3]+Csin(Z[4])→Z[6]P+(Z[5]-Z)cos(K)-Z[6]sin(K)→Z[7]Q+(Z[5]-Z)sin(K)+Z[6]coc(K)→Z[8]“N=”:Z[7] ◢计算后的X大坐标“E=”:Z[8]◢计算后的Y大坐标Goto 02、缓和曲线计算程序:“X0”?P 曲线起点X坐标“Y0”?Q 曲线起点Y坐标“X1”?X 曲线交点X坐标“Y1”?Y 曲线交点Y坐标“ZHZH”?Z 曲线起点桩号“R”?R 圆曲线段半径“L”?L 缓和曲线单边曲线长度“L1R2”?O 曲线前进方向左为1右为2Lbl 0“LCZH”?F 测量里程Abs(F-Z)→BIf B<L:Then Goto 1:Else Goto 4:IfEnd 缓和段及圆曲线段计算转换Lbl 1180B2/(2RLπ)→A:RL/B→E:B-B5/(40R2L2)+B9/(3456R4L4)- B13/(599040R6L6)+ B17/(175472640R8L8)- B21/(7.80337152*1010R10L10)→C (红色的为计算小半径增加精度)B3/(6RL)-B7/(336R3L3)+B11/(42240R5L5)- B15/(9676800R7L7)+ B19/(3535596640R9L9)- B23/(1.8802409472*1012R11L11)→D:C-Esin(A) →G(红色的为计算小半径增加精度)If O=1:Then Goto 2:Else Goto3:IfEndLbl 2-D→D:D-Ecos(A) →HGoto 7D→D:D+Ecos(A) →HGoto 7Lbl 4180(B-L/2)/(Rπ)→A:L/2-L3/(240R2)→E:L2/(24R)-L4/(2688R3)→M E+Rsin(A) →C:C-Rsin(A) →GIf O=1:Then Goto 5:Else Goto 6:IfEndLbl 5-(M+R(1-cos(A)) →D:D-Rcos(A) →HGoto 7Lbl 6M+R(1-cos(A)) →D:D+Rcos(A) →HGoto 7Lbl 7Pol(P-X,Q-Y):ClsJ+180→KP+Ccos(K)-Dsin(K) →Z[2]:Q+Csin(K)+Dcos(K) →Z[3]P+Gcos(K)-Hsin(K) →Z[4]:Q+Gsin(K)+Hcos(K) →Z[5]Pol(Z[2]-Z[4],Z[3]-Z[5]):ClsJ+180→Z[1]“U”?U:“V”?V 测量所得大地坐标(U-Z[2])cos(Z[1])+(V-Z[3])sin(Z[1]) →Z[6](V-Z[3])cos(Z[1])-(U-Z[2])sin(Z[1]) →Z[7]If F>Z:Then Goto 9:Else Goto A:IfEndLbl 9If O=1:Then Z[7]→Z[7]:-Z[6]→Z[6]:Else –Z[7]→Z[7]:Z[6]→Z[6] IfEndGoto BLbl AIf O=1:Then –Z[7] →Z[7]:Z[6] →Z[6]:Else Z[7] →Z[7]:-Z[6] →Z[6] IfEndGoto BLbl B“X=”:Z[7] ◢计算后轴线X坐标“Y=”:Z[6] ◢计算后轴线X坐标“0→Goto 0,1→BZZB”?S 0为还回计算过程、1为进行轴线坐标计算大坐标If S=0:Then Goto 0Else Goto 8:IfEndLbl 8“X”?T:“Y”?WIf F>Z:Then Goto C:Else Goto D:IfEndLbl CIf O=1:Then T→Z[8]:-W→Z[11]:Else -T→Z[8]:W→Z[11]:IfEndGoto ELbl DIf O=1:Then -T→Z[8]:W→Z[11]:Else T→Z[8]:-W→Z[11]:IfEndGoto ELbl EZ[2]+Z[11]cos(Z[1])-Z[8]sin(Z[1]) →Z[9]Z[3]+Z[11]sin(Z[1])+Z[8]cos(Z[1]) →Z[10]“N=”:Z[9] ◢计算后X大坐标“E=”:Z[10] ◢计算后Y大坐标Goto 03、竖曲线计算程序:“ZH1”?A 交点1桩号“H1”?B 交点1高程“ZH2”?C 交点2桩号“H2”?D 交点2高程“ZH3”?E 交点3桩号“H3”?F 交点3高程“R”?R 曲线半径(D-B)/(C-A) →Z[1]:(F-D)/( E-C) →Z[2]:Z[2]-Z[1] →W:Abs(RW/2)→T Lbl 0“ZHC”?G:“HC”?H 测量桩号及高程If G≤(C-T):Then Goto 1:Else Goto 2:IfEndLbl 1H-(G-A) Z[1]-B →Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0Lbl 2If G≥(C+T):Then Goto 3:Else Goto 4:IfEnd Lbl 3H-(G-C) Z[2]-D→Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0Lbl 4(G-(C-T))2/(2R) →Z[4](G-A) Z[1]+B →Z[5]If W>0:Then Goto 5:Else Goto 6:IfEndLbl 5H-(Z[5]+Z[4]) →Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0Lbl 6H-(Z[5]-Z[4]) →Z[3]“H+-”:Z[3] ◢计算值+为向下、-为向上Goto 0非完整缓和曲线计算起点和交点方向大坐标Lbl 0“X1”?A 非完整缓和曲线起点X坐标“Y1”?B 非完整缓和曲线起点Y坐标“X2”?C 非完整缓和曲线终点X坐标“Y2”?D 非完整缓和曲线终点Y坐标“A”?E 缓和曲线A值“R”?F 缓和曲线半径“L1”?G 图纸标注缓和曲线长度“L1R2”?R 方向左1右2E2÷F→H 缓和曲线完整计算长度H-G→K 缓和曲线打断长度K-K5÷(40×E4)+K9÷(3456×E8) -K13÷(599040×E12)+K17÷(175472640×E16)-K21÷(78033715200×E20) →LK3÷(6×E2)-K7÷(336×E6)+K11÷(42240×E10)-K15÷(9676800×E14)+K19÷(3530096640×E18)-K23÷(1880240947200×E22) →MH-H5÷(40×E4)+H9÷(3456×E8) -H13÷(599040×E12)+H17÷(175472640×E16)-H21÷(78033715200×E20) →NH3÷(6×E2)-H7÷(336×E6)+H11÷(42240×E10)-H15÷(9676800×E14)+H19÷(3530096640×E18)-H23÷(1880240947200×E22) →OTan-1((O-M)÷(N-L))→PPol(A-C,B-D)J+180→QIf R=1Then Q+P→SElse Q-P→SIfEndAbs(Lcos(S)-Msin(S)-A) →TAbs(Lsin(S)-Mcos(S)-B) →UT+100cos(S) →VU+100sin(S) →W“A0”:T◢完整缓和曲线原点X坐标计算值“B0”:U◢完整缓和曲线原点Y坐标计算值“A1”:V◢完整缓和曲线交点方向X坐标计算值“B1”:W◢完整缓和曲线交点方向Y坐标计算值Goto 0。
缓和曲线测设

缓和曲线(spiral)的测设一.概念及基本公式1.概念为缓和行车方向的突变和离心力的突然产生与消失,需要在直线(超高为0)与圆曲线(超高为h )之间插入一段曲率半径由无穷大逐渐变化至圆曲线半径的过渡曲线(使超高由0变为h ),此曲线为缓和曲线。
主要有回旋线、三次抛物线及双纽线等。
2.回旋型缓和曲线基本公式sRlc lc ==其中ρ s l ——缓和曲线全长。
(1)切线角公式sRllcl2222==β β——缓和曲线长l 所对应的中心角。
(2)缓和曲线角公式πβ001802Rl s =0β——缓和曲线全长s l 所对应的中心角亦称缓和曲线角。
(3)缓和曲线的参数方程⎪⎪⎩⎪⎪⎨⎧-=-=3373225336640s s s l R l Rl l y l R l l x(4)圆曲线终点的坐标⎪⎪⎩⎪⎪⎨⎧=-=R l y R l l x s s s 6402023二.主点的测设1.测设元素的计算(1)内移距p 和切线增长q的计算232240224Rll q R l p ss s -==(2)切线长qtgp R T H ++=2)(α曲线长s H l R L 2180)2(0+-=πβα,其中圆曲线长180)2(0πβα-=R L Y 。
外距Rp R E H -+=2sec )(α;切曲差H H H L T D -=22.主点的测设(1) 里程的计算ZH=JD-T H ;HY=ZH+l s ;QZ=ZH+L H /2;HZ=ZH+L H ;YH=HZ-l s (2)测设方法。
(见例题)例题:如下图,设某公路的交点桩号为K0+518.66,右转角αy =18018'36",圆曲线半径R=100m ,缓和曲线长l s =10m ,试测设主点桩。
(作为实习课内容)解:(一)计算测设元素p=0.04m ;q=5.00m ;35152180200'''==πβRl s⎪⎪⎩⎪⎪⎨⎧===-=m R l y m Rl l x s ss 17.0600.104020230 mq tgp R T H 12.212)(=++=α;ml R L s H 96.412180)2(0=+-=πβαmR p R E H 33.12sec)(=-+=α(二)计算里程ZH=K0+497.54;HY=K0+507.54;QZ=K0+518.52;HZ=K0+539.50;YH=K0+529.50 (三)主点测设1.架仪JD i ,后视JD i-1,量取T H ,得ZH 点;后视JD i+1,量取T H ,得HZ 点;在分角线方向量取E H ,得QZ 点。
不完整缓和曲线起点及终点的坐标及切线方位角计算方法

怎样计算不完整缓和曲线起点及终点的坐标及切线方位角以上为一条匝道的曲线图及要素表。
第一缓和段长度根据公式c=R*L及C=A*A,图中A=100,R=150,可算出第一缓和段的长度为66.667米。
而HY里程减去YH里程为60.902米。
因此此段缓和曲线是在离其起点5.765米的地方与前段圆曲线相交。
图上标为YH点。
固此YH点并非第一缓和段起点。
第二缓和段也有同样的问题,DZD点亦非第二缓和段终点。
问题:怎样计算第一缓和段真正起点的坐标和第二缓和段真正终点的坐标。
及切线方位角。
本人水平有限,苦苦思索未得其解。
在此劳烦各位同仁给予小弟支援。
不胜感谢!测量路上诚与仁兄们携手同行,让我们的测量之路多一丝欣慰,少一分苦闷。
QQ26889412E-mail:****************注:曲线要素表可能看不清楚。
但可以把图片另存为一个文件。
然打开此文件就非常清楚了。
这是用一个不完整的缓和曲线来顺接两边不同半径的圆曲线.从资料可知,另一圆曲线半径R=1734.605米即,缓和曲线一边半径为150米,另一边的半径不是无穷大,而是1734.605,这也是产生5.765米差值的原因所在.真正的ZH点(或HZ点)在中线外.计算方法:因为连接R=150米圆曲线的LS=66.66666米,所以可以计算出真正ZH点至HY点(R=150的圆曲线)的坐标增量:△X和△Y(此增量为,以ZH点切线为X轴,其法线为Y轴的坐标系增量,也就是书本上讲的当计算点离ZH点距离=LS时,相对于ZH点的坐标增量)HY点坐标和方位角应该是已知的,坐标增量现在也知道,反算出ZH点即可.以前计算过,过程是这样的:1.计算出Y1H的坐标及方位角;2.计算出过渡段缓和曲线在Y1H点的支距dx,dy及偏角β;3.由Y1H的方位角及偏角β可反算出过渡缓和曲线虚起点的方位角。
4.由Y1H的坐标、dx,dy及方位角可反算出过渡缓和曲线起点的坐标。
(用支距到大地坐标的变换公式反算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
不完全缓和曲线测量坐标计算公式
根据缓曲参数A,不完全缓曲线长l,圆半径R2,应用缓和曲线线长方程反求非完整缓和曲线另一端的半径R1,R1>R2时,A2/R2-A2/R1=l,R1=1/(1/R2-l/A2),R1<R2
时,A2/R1-A2/R2=l,R1=1/(1/R2+l/A2),(参考卡西欧9750程序书)
回旋参数为A,起点曲率半径为R1,终点曲率半径为R2,R1>R2,不完全缓和曲线长l,把不完钱缓和曲线的一端O1(曲率半径为R1)顺延至曲率半径为∞的O处,形成完全缓和曲线,这样就可用完全缓和曲线计算公式推导不完全缓和曲线计算公式。
l=A2(1/R2-1/R1),A2=l*R1*R2/(R1-R2),不完全缓和曲线上任意点P距起点O1曲线长为l i,起点O1曲率半径为R1,不完全缓和曲线上任意点切线与起点切线夹角(不完全缓和曲线转角)β
=l i/R1+l i2/2/A2,若R1<R2则βP
P
=l i/R1-l i2/2/A2,x=l i-l i3/6/R12-l i4/8/R1/A2-l i5/40/A4,y=l i2/2/R1+l i3/6/A2-l i4/24/R13-l i5/20/R12/A2,如以R2小半径建立切线支距坐标系(l i为P点到O2的曲线长),则βP
=l i/R2-l i2/2/A2,x=l i-l i3/6/R22+l i4/8/R2/A2-l i5/40/A4,y=l i2/2/R2-l i3/6/A2-l i4/24/R23+l i5/20/R22/A2,(参考4、2、5)
1.不完全缓和曲线的特性:缓和曲线OAB为完全缓和曲线,曲率半径从O点的+∞到B点的R2,不完全缓和曲线是完全缓和曲线OAB的一部分,起点A点的半径为R1,终点B点的半径为
R2,R1>R2,曲线AB的长为l,缓和曲线的曲线半径变化率为C=A2(缓和曲线参
数)=l*R1*R2/(R1-R2)。
2.不完全缓和曲线上任意点测量坐标的计算:(1)方法一:建立以O点(ZH 点)为原点,以O点处的切线为x轴,以垂直于x轴且方向指向曲线内侧的方向为y轴的坐标系,A 点(YH点)的测量坐标(X A,Y A)、切线方位角αA、曲线AB的长l,B点(HY点)的半径R2为已知,ZH 点(O点)至不完全缓和曲线起点A点的曲线长l0=l*R2/(R1-R2),A点在xOy坐标系中的相对坐标为x A=l o-l o5/40/C2+l o9/3456/C4,y A=l o3/6/C-l o7/336/C3+l o11/42240/C5,A点切线与x轴的夹角为:βA=l O2/2/C(弧度),设AB上任意一点P至A的曲线长为l i,则有:P点在xOy坐标系中的相对坐标为x p=(l o+l i)-(l o+l i)5/40/C2+(l o+l i)9/3456/C4,y p=(l o+l i)3/6/C-(l o+l i)7/336/C3+(l o+l i)11/42240/C5,P点切线与x轴的夹角为:βP=(l o+l i)2/2/C(弧度),所以P点的切线方位角为αPQ=αA-βA*180/л+β
*180/л(曲线右转),αPQ=αA+βA*180/л-βP*180/л(曲线左转),法线方位角为:αPF=αA-β
P
*180/л+βP*180/л+90°(曲线右转),αPF=αA+βA*180/л-βP*180/л+90°(曲线左转),P点A
的测量坐标为:曲线右转时:X P=X A+(x P-x A)cos(αA-βA*180/л)-(y P-y A)sin(αA-βA*180/
л),Y P=Y A+(y P-y A)cos(αA-βA*180/л)-(x P-x A)sin(αA-βA*180/л);曲线左转
时:X P=X A+(x P-x A)cos(αA+βA*180/л)+(y P-y A)sin(αA+βA*180/л),Y P=Y A-(y P-y A)cos(αA+β
*180/л)+(x P-x A)sin(αA+βA*180/л)。
(参考1、6)
A
(2)方法二:建立以A点(YH点)为原点,以A点处的切线方向为x轴,以垂直于x轴且方向指向
曲线内侧的方向为y轴的坐标系,缓和曲线上任意点P到原点A的曲线长为l i,P点切线与x轴
的夹角为β,所以曲线AP对应的螺旋角为β。
该缓和曲线所对应的完整缓和曲线上从半径为+∞到R1的弧长l o=l*R2/(R1-R2),根据缓和曲线的特性可得P点处的曲率半径ρ=C/(l o+l i),l i所对
应的螺旋角为:β=(l o*l i+l i2/2)/C(弧度),P点在xAy坐标系中的相对坐标为:小
=l i-l i3*(l o2/3+l o*l i/4+l i2/20)/2/C2+l i5(l o4/5+l o3*l i/3+3*l o2*l i2/14+l o*l i3/16+l i4/144)/24/C4,y p=l i2*(l o+l i/ p
3)/2/C-l i4*(l o3/2+3*l o2*l i/5+l o*l i2/4+l i3/28)/12/C3+l i6*(l o5/3+5*l o4*l i/7+5*l o3*l i2/8+5*l o2*l i3/18+l o*l i4/
16+l i5/176)/240/C5。
所以P点处的切线方位角为:αPQ=αA+β*180/л(曲线右转),αPQ=αA-β
*180/л(曲线左转)。
法线方位角为:αPF=αA+β*180/л+90°(曲线右转),αPF=αA-β*180/л
+90°(曲线左转)。
P点的测量坐标为:曲线右转时:X P=X A+x p cosαA-y p sinαA,Y P=Y A+y p cosα
+x p sinαA;曲线左转时:X P=X A+x p cosαA+y p sinαA,Y P=Y A-y p cosαA+x p sinαA。
(参考1、6)
A
3.公路卵形曲线边线测量坐标的计算:根据已知的道路宽度D可计算道路边线的坐标。
右边
线:X r=X p+D/2*cos(αPF),Y r=Y p+D/2*sin(αPF);左边线:X l=X p+D/2*cos(α
+180°),Y l=Y p+D/2*sin(αPF+180°)(参考1、6)
PF。