松下伺服A6系列编码器接线定义
松下A6-A5伺服电机各接线端接线图
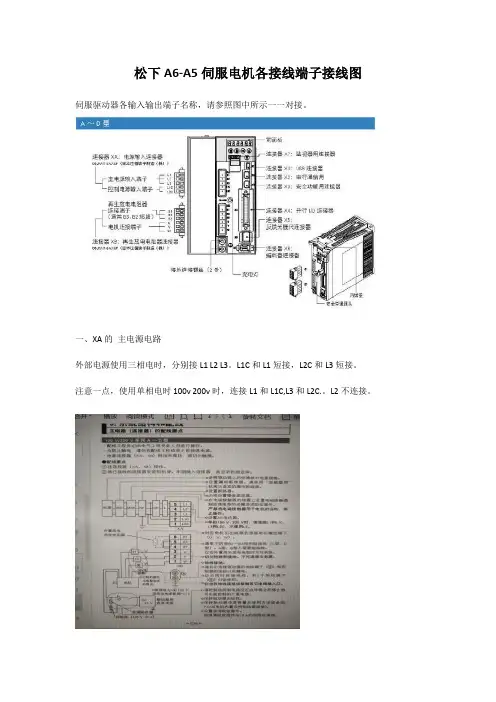
松下A6-A5伺服电机各接线端子接线图
伺服驱动器各输入输出端子名称,请参照图中所示一一对接。
一、XA的主电源电路
外部电源使用三相电时,分别接L1 L2 L3。
L1C和L1短接,L2C和L3短接。
注意一点,使用单相电时100v 200v时,连接L1和L1C,L3和L2C.。
L2不连接。
请根据上图进行接线,注意线色
二、
XB 电机连接端子电路
1.对应的电机引出线颜色连接电机输出端子(U V W)
2.外置再生电阻器(B1 B2 B3),B2和B3之间需要连接短路线(C型D型),A型B型不需要短路线。
3.地线端子要接地,一个地线端子要接电机,另外一个地线端子要接地线。
三.
X1端子:连接上位机电脑(mini USB)
X2端子:通信连接器RS485 RS232.
X3端子:是安全端子1和2 不连接,3和4安全输入1. 5和6安全输入2 ,关闭发往电源模块的驱动信号,切断电机电流,7和8是EDM输出,监视由于安全功能故障而进行的监视器输出。
X3端子:safe安全模块
X4端子:并行I/o连接端子X5 端子:外部光栅尺连接。
X6端子:编码器的连接。
X7监视器的输出。
松下A6伺服电机说明书Part4
在使用之前2准备3连接Array5调整6出现问题时7资料4-14-2●参数No.如下所示。
Pr0.00参数No.分类编号●「相关模式」表示的项目 P :位置控制、S :速度控制、T :转矩控制、 F :全闭环控制。
●通用型不能使用部分参数。
・ 通用型无X2(串行通信用连接器)、X3(安全功能用连接器)、X5(外部位移传感器连接用连接器)模拟输入。
4-31在使用之前2准 备3连 接5调 整6出现问题时7资 料4-44-51在使用之前2准 备3连 接5调 整6出现问题时7资料・ 通用型无X2(串行通信用连接器)、X3(安全功能用连接器)、X5(外部位移传感器连接用连接器)模拟输入。
・P.3-32〜「连接器X4输入输出的说明」标准出厂设定:【 】・参数No.上有「*」标记的为接通控制电源时的变更内容有效。
・P.3-32〜「连接器X4输入输出的说明」标准出厂设定:【 】4-64-7・P.3-32〜「连接器X4输入输出的说明」1在使用之前2准 备3连 接5调 整6出现问题时7资 料标准出厂设定:【 】标准出厂设定:【 】4-84-9・P.3-32〜「连接器X4输入输出的说明」1在使用之前2准 备3连 接5调 整6出现问题时7资 料标准出厂设定:【 】标准出厂设定:【 】〈位置控制时的Pr0.08, Pr0.09, Pr0.10的关系〉4-104-111在使用之前2准 备3连接5调 整6出现问题时7资 料〈全闭环控制时的Pr0.08, Pr0.09, Pr0.10的关系〉虽然分母、分子的数值可设定为任意值,但在设定了极端的分频比或者倍频比时,无法保证其动作。
请在1/1000〜8000倍之间选取分频・倍频比的范围。
此外,即使在上述的范围内倍频还是较高的情况下,由于指令脉冲输入的偏差或噪音有时会发生Err27.2(指令脉冲倍频异常保护)。
全闭环控制时,请固定指令分倍频。
有发生Err25.0(混合偏差过大异常保护)的情况。
松下A6伺服电机说明书Part4
在使用之前2准备3连接Array5调整6出现问题时7资料4-14-2●参数No.如下所示。
Pr0.00参数No.分类编号●「相关模式」表示的项目 P :位置控制、S :速度控制、T :转矩控制、 F :全闭环控制。
●通用型不能使用部分参数。
・ 通用型无X2(串行通信用连接器)、X3(安全功能用连接器)、X5(外部位移传感器连接用连接器)模拟输入。
4-31在使用之前2准 备3连 接5调 整6出现问题时7资 料4-44-51在使用之前2准 备3连 接5调 整6出现问题时7资料・ 通用型无X2(串行通信用连接器)、X3(安全功能用连接器)、X5(外部位移传感器连接用连接器)模拟输入。
・P.3-32〜「连接器X4输入输出的说明」标准出厂设定:【 】・参数No.上有「*」标记的为接通控制电源时的变更内容有效。
・P.3-32〜「连接器X4输入输出的说明」标准出厂设定:【 】4-64-7・P.3-32〜「连接器X4输入输出的说明」1在使用之前2准 备3连 接5调 整6出现问题时7资 料标准出厂设定:【 】标准出厂设定:【 】4-84-9・P.3-32〜「连接器X4输入输出的说明」1在使用之前2准 备3连 接5调 整6出现问题时7资 料标准出厂设定:【 】标准出厂设定:【 】〈位置控制时的Pr0.08, Pr0.09, Pr0.10的关系〉4-104-111在使用之前2准 备3连接5调 整6出现问题时7资 料〈全闭环控制时的Pr0.08, Pr0.09, Pr0.10的关系〉虽然分母、分子的数值可设定为任意值,但在设定了极端的分频比或者倍频比时,无法保证其动作。
请在1/1000〜8000倍之间选取分频・倍频比的范围。
此外,即使在上述的范围内倍频还是较高的情况下,由于指令脉冲输入的偏差或噪音有时会发生Err27.2(指令脉冲倍频异常保护)。
全闭环控制时,请固定指令分倍频。
有发生Err25.0(混合偏差过大异常保护)的情况。
松下MINAS A6脉冲伺服-电子齿轮比的定义
Pr0.08=1000指令脉冲,也就是1k个脉冲。
那么PLC的脉冲频率=1kHz时,电机转速为1r/s = 60r/min; PLC的脉冲频率=50kHz时,电机转速为50r/s = 3000r/min;
A B
此外,客户常说设备存在几个μ的误差,这个与机械特性也有关,联轴器,丝杆间隙。 A:绝对位置0,多圈数0,单圈数4000000; Pr0.08=10000,丝杆导程10mm,指令脉冲当量1μm/p,AB距离30mm。 从A→B,PLC发送30000个脉冲,电机转3圈, B:绝对位置30mm,多圈数3,单圈数4000000。
Pr0.09,Pr0.10常用在加入减速机,皮带的情景下,换算出的 电机每圈指令脉冲数不是整数时使用。 使用前,请将Pr0.08设为0。
举例:皮带大小轮结构,比例1:3,大轮1圈行程16mm, 要求上位指令脉冲当量1μm/pulse,电子齿轮如何 设置?
解答:指令脉冲当量1μm/pulse,即PLC发送16000个脉冲 大轮转1圈,电机转3圈。
1
电子齿轮比的设置,红框内表示电子齿轮比。
电子齿轮比一般分子设电机编码器分辨率,分母 设PLC一圈的指令脉冲数(不是整数时进行约分)。 Pr0.08可以直接设置一圈的PLC指令脉冲数(只能 设置整数),默认10000。等效分子设编码器分 辨率,分母设PLC指令脉冲数,内部数据处理原理 参考左图。
按照上例:伺服直连丝杆结构,丝杆螺距10mm,PLC发送10000个 脉冲电机转一圈 指令脉冲当量:0.001mm/pulse 编码器脉冲当量:0.000001192mm/pulse 那么,设置Pr0.08 =10000 即可
A6脉冲伺服-电子齿轮比的定义
松下A系列伺服位置控制使用方法
松下A系列伺服位置控制使用方法Document number【SA80SAB-SAA9SYT-SAATC-SA6UT-SA18】松下A5系列伺服位置控制使用方法置模式(Pr r 000)-----按上下键或<键(可移动小数点)到要设定的参数——按S键进入、修改(按上升键或下降键)——按S键保持3秒——按一下M键>写入模式(EE_SEb)>再按”S”键>执行显示(EEP -)按上升键保持5秒----EEP --、EEP ---、EEP ----、--------SbRrb---Finish,结束。
三、辅助功能模式(AF_RcL):按上升或者下降键选择项目1、自动补偿调整(AF_oF1、oF2、oF3)AF_RcL>下降键>AF_oF1>S键>oF1 --持续按上升键执行。
2、试运行(JOG)持续按上升键(CW)--rERdy------<键---SrU_on---持续上升键(CCW)3、参数初始化(AF_ini)---按“S”键----ini----持续按上升键5秒 -------Finish----------结束4、前面板锁定解除(AF_unL)---按“S”键---unL--持续按上升键5秒----SbRrb----unL------、------------Finish 结束。
以上字母只是近似面板上显示的简码。
四、常见报警及其原因1、“11”---控制电源电压不足电源电压低或者驱动器故障2、“16”过载负载过重或电机电源线相序错误3、“21”编码器通讯异常编码器断线或者虚焊、漏焊、脱焊4、“24”位置偏差过大电机未按指令动作加大的值或者设为0五、接线1、主电源及编码器接线:2、大功率伺服编码器接线:3、控制端子接线:。
松下伺服系统基本接线及常见问题解决方法
松下伺服系统基本接线及常见问题解决方法一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
MBDDT2210003电机,MBDDT2210003电机常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?咨询温小姐;张先生182==019==88=309 或150 -266-48-109 技术产品资料和选型请加q; 8788--56087,价格优惠,质量保证,货源充足。
松下伺服A6系列编码器接线定义
目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~5.0KW多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。
松下伺服A6系列编码器接线定义知识分享
松下伺服A6系列编码器接线定义
目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~5.0KW多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。
松下A6伺服电机说明书Part3
在使用之前2准备4设定5调整6出现问题时7资料3-13-2概 要根据从上位控制器输入的位置指令(脉冲列)进行位置控制。
以下针对位置控制时的基本设定进行说明。
功 能①指令脉冲输入处理位置指令(脉冲列)对应有以下三种形态的输入。
・2相脉冲・正方向脉冲/负方向脉冲・脉冲列+符号根据上位控制器的规格和装置设置的情况,设定脉冲形态和脉冲计数的方式。
此外,输入端子为2系统的对应。
・输入1「PULSH1,.PULSH2,.SIGNH1,.SIGNH2」长线驱动输入(8.Mpps)・输入2「PULS1,.PULS2,.SIGN1,.SIGN2」光电耦合器输入(500.kpps)长线驱动输出时,「输入2」也可以使用,但容许输入频率不变。
●关联参数以上参数的详情,请参照P.4-8,.9「参数的详情」。
3-31在使用之前2准 备4设 定5调 整6出现问题时7资 料②电子齿轮功能具有将上位控制器输入的脉冲指令与已设定的分倍频的比相乘的值作为位置控制部的位置指令的功能。
通过此功能,可任意设定单位输入指令脉冲的电机旋转・移动量,由于上位控制器的脉冲输出能力的限制,电机达不到所要的速度时,可以增大指令脉冲频率。
●关联参数上述参数的详情请参照P.4-10,11「参数详情」。
③位置指令滤波器功能想使分倍频(电子齿轮)后的位置指令平滑时,需要设定指令滤波器。
●关联参数上述参数的详情请参照P.4-26〜4-27「参数详情」。
3-4④脉冲再生功能可从伺服驱动器中将移动量用AB相脉冲方式传送到上位控制器。
此外,输出源为编码器时,Z相信号为电机每旋转1次输出一次,输出源为外部位移传感器时,绝对位置为零的情况下输出。
此时的输出分辨率以及B相逻辑、输出源(编码器、外部位移传感器)可用参数进行设定。
●关联参数上述参数的详情请参照P.4-11,.13,.47,.55,.59「参数详情」⑤偏差计数器清除功能此功能为,通过偏差计数器清除输入(CL),将位置控制的位置偏差计数器的值清零。
松下交流伺服接线和常见故障分析报告
一、根本接线〔某某太鑫电子科技某某提供〕主电源输入采用~220V,从L1、L3接入〔实际使用应参照操作手册〕;控制电源输入r、t也可直接接~220V电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤〔某某太鑫电子科技某某提供〕1.JOG试机功能〔某某太鑫电子科技某某提供〕仅按根本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’按住‘<’键直至显示‘SrV-on’按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键完毕。
2.内部速度控制方式〔某某太鑫电子科技某某提供〕+〔7脚〕接+12~24VDC,-〔41脚〕接该直流电源地;SRV-ON〔29脚〕接-参数No.53、No.05设置为1:〔注此类参数修改后应写入EEPROM,并重新上电〕调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式〔某某太鑫电子科技某某提供〕+〔7脚〕接+12~24VDC,-〔41脚〕接该直流电源地;SRV-ON〔29脚〕接-PLUS1〔3脚〕、SIGN1〔5脚〕接脉冲源的电源正极〔+5V〕;PLUS2〔4脚〕接脉冲信号,SIGN〔6脚〕接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS〔4脚〕送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B(A4对应48,4B;A5对应009,010),可改变电机每转所需的脉冲数〔即电子齿轮〕。
常见问题解决方法: 〔某某太鑫电子科技某某提供〕1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。