组态软件实用技术教程 第6章
组态软件ppt
第一节 组态软件概述
2、 组态软件的发展趋势
(1).总的发展趋势
• 组态软件是工业应用软件的一个组成部分,其发展受到很多因素的制 约。归根结底,应用的带动对其发展起着最为关键的推动作用。 • 未来的传感器、数据采集装置、控制器的智能化程度越来越高,实时 数据浏览和管理的需求日益高涨,有的买主甚至要求在自己的办公室 里监督定货的制造过程。有的装置直接内嵌“Web Server”,通过以 太网就可以直接访问过程实时数据。即使这样,也不能认为不再需要 组态软件了。 • 用户要求的多样化,决定了不可能有哪一种产品囊括全部用户的所有 要求,直接用户对监控系统人机界面的需求不可能固定为单一的模式, 因此直接用户的监控系统是始终需要“组态”和“定制”的。这就导 致组态软件不可能退出市场,因为需求是存在的。 • 类似OPC这样的组织的出现,以及现场总线、尤其是工业以太网的快 速发展,大大简化了异种设备间互连、开发I/O设备驱动软件的工作量。 I/O驱动软件也逐渐会朝标准化的方向发展。
第5章 组态软件
• • • • • • • 组态软件概述 组态软件的系统构成 组态软件图形开发环境 监控组态软件的I/O设备驱动 组态软件接口程序 OPC技术 工控编程语言IEC61131-3
第三节 组态软件图形开发环境
第三节 组态软件图形开发环境
1、 基本概念
• • • • • 脚本程序 图形对象 动画连接 简单图形对象 复杂图形对象
第一节 组态软件概述
2、 组态软件的发展趋势
(5).影响组态软件发展的因素 • 软件质量是影响产品发展的主要因素。在竞争不断加剧的 今天,企业规模、科研开发的投入量、质量体系建设情况 等对组态软件的质量影响甚大。
第一节 组态软件概述
组态软件实用技术教程(刘忠超)1-25章 (1)
•
图5-9 报警一览显示属性设置
• 注意:选中“显示当前报警状态”,不然报警栏目只显示运 行时锁存的报警状态,默认就是显示锁存报警状态。
• (6)所有设置完成后单击保存,其运行效果如图5-10所示。
图5-10 运行效果
5.1.4报警运行
• 为操作员提供视觉信号是开发一个好的操作员显 示的关键。一种提供视觉信号的方法是建立基于 报警的动态对象。另一个有效的方法是为画面添 加一个报警一览对象。该对象让操作员选择、确 认和删除多个报警,排序和过滤报警,以及允许、 禁止和静音报警声音。也可以使用报警一览对象 来为报警的状态和优先级进行颜色编码,为操作 员提供视觉信号。
• 首先从工具箱中点击“数据连接戳”按钮,出现“数据连接” 对话框,点击“浏览”按钮,打开“表达式编辑器”,如图 5-13所示。点击“报警计数器”即可选择相应的连接。
•
图5-13 数据连接对话框
back
5.2 iFIX调度
• 调度在iFIX中常用来触发动作,这些动作都是VBA脚本,可 以触发的操作有基于特定的时间(基于时间)和基于数值或 表达式(基于事件)两种方式。
• 消序息消指息的和是事i件FI消X提息。示信息,其类型主要有系统消息、应用程
• (运1行)消系息统。消息包括启动消息、系统错误消息、I/O驱动消息、
• (息2、)脚应本用消程息序。消息包括操事、用器件于模块消下拟(息列量D即R)块输数:入、据数块模块字(拟消量量A息I输寄),入存、与块模器报(拟块警(量D相I)输A似R)、出,、数块但(文字无量本A需O输)块用出、(户块开T确X)关。
表5-5 排序属性含义表
• (2)报警确认。在运行时,报警将在画面中产生视觉信号。 这些信号将在报警一览对象或数据连接中以颜色或闪烁的文 本样式出现,或者由报警触发动画对象。可以配置基于报警 的视觉信号保留在屏幕上,直到操作员对报警做出确认并且 块的值返回正常为止。
精选工业组态软件实用技术第2章创建一个简单工程
ⅱ、点击参数“PV”,在“连接I/O设备”的“设备”下拉框中选择设备“NEWPLC”。点击“增加”按钮,出现如图所示的“设备连接项”对话框。
在“寄存器/继电器”选择框中选择“X/WX(外部输入继电器)”,在“地址”输入框中输入0,“位偏移”输入框中输入0,点击“确定”返回
重复上述步骤,可连接所有定义过的点。在重复上述步骤时,对于同一个继电器,位偏移依次加1。对话框中填写的值如表所示。
存储罐液面的实时高度、入口阀门、出口阀门、启动和停止两个按钮;有1个工艺,为罐中液体的配方
化学反应釜PLC控制组态仿真
在本例中,有5个控制点,为存储罐液面的实时高度、入口阀门、出口阀门、启动和停止两个按钮;有1个工艺,为罐中液体的配方。5个点中入口阀门和出口阀门用电磁阀控制,液面的实时高度用高精度液位传感器检测,两个按钮用常用的机械按钮。但是5个点用4个变量(即反映存储罐的液位模拟量、入口阀门的状态为数字量、反映出口阀门开关状态的数字量、控制整个系统的启动与停止的开关量)就行。
在数据库中定义了上述5个点后,下面将建立一个I/O设备—PLC,上述定义好的5个点的值将取自PLC。
在Draw导航器中双击“实时数据库”项使其展开,选择“I/O设备驱动”项使其展开,在展开项目中选择“PLC”项并双击使其展开,然后继续选择厂商名“NaiS(松下电工)”并双击使其展开后,选择项目“FX系列”,如图所示。
按图所示绘制窗口图形。
5、制作动画连接
前面已经做了很多事情,包括:制作显示画面、创建数据库点,并通过一个自己定义的I/O设备“NEWPLC”把数据库点的过程值与设备NEWPLC连接起来。现在再回到开发环境Draw中,通过制作动画链接使显示画面活动起来
(1)定义数据源
界面系统除了可以访问本地数据库(即与界面系统运行在同一台PC机上的数据库)外,还可以通过网络访问安装在其它计算机上的ForceControl数据库中的数据。因此,当在界面系统Draw中创建变量时,如果变量引用的是外部数据源(包括:ForceControl数据库,DDE服务器或其它第三方数据提供方),首先对要引用的外部数据源进行定义。
INTOUCH组态软件教程ppt课件
InTouch 应用程序管理器用于组织您所创建的应用程序,也可以用于将 WindowViewer 配置成一个NT 服务程序,为基于客户机和基于服务器的结构
授权
FactorySuite系统的授权信息可以通过授权查看实用工具 查看,运行授权查看工具的方法是在WindowMaker Help 的“关于”对话框里面。
要知道更详细的授权信息,请在安装InTouch之后查看 《FactorySuite 系统管理员指南》 。
技术支持
Wonderware技术支持提供许多支持选项,来回答有关 Wonderware 产品及其 实施的问题。在联系技术支持前,请先参考《InTouch 用户指南》中的有关章 节,以寻求您使 用 InTouch 系统时所遇问题的可能解决方法。如果您觉得有 必要求助于技术支持,请提供以下信息: 1. 您的软件序列号。 2. 您所运行的 InTouch 版本。 3. 您所使用的操作系统类型和版本。例如,Microsoft Windows NT 第 4.0 SP5 版(或以上版本的)工作站。 4. 描述所遇系统错误消息的准确用词。 5. 来自Wonderware Logger、Microsoft Diagnostic utility (MSD) 或任何其它诊 断应用程序的任何相关输出列表。 6. 您所尝试的解决方法的细节和结果。 7. 有关如何重现问题的细节。 8. 如果所遇问题是老问题,请提供指定 的 Wonderware 技术支持案例号。 有关技术支持的详细信息,请参阅您的联机《FactorySuite 系统管理员指南》。
MCGS组态软件培训教案

NO.5
工控组态软件
第一章 组态软件概述
组态软件的主要使用者是从事自动化工程设计、维护、操 作的技术人员,用户在使用组态软件时可以生成适合自己需要 的应用系统而不需要修改软件程序的源代码。
用组态软件生成的应用系统具有实时性和多任务性,可以 在一台计算机上同时完成数据采集、信号数据处理、数据图形 显示、人机对话、实时数据的存储、历史数据的查询、实时通 讯等多个任务。
第一章 组态软件概述
2012-2013-1
NO.1
第一章 组态软件概述
[培训教案] 项目1:组态软件入门 [培训教案] 项目2:实时数据库
[培训教案] 项目3:用户窗口组态
[培训教案] 项目4:运行策略组态
[培训教案] 项目5:设备窗口组态
[培训教案] 项目6:主控窗口组态
[培训教案] 项目7:组态应用实例
NO.25
MCGS用户应用系统的结构
第一章 组态软件概述
用户应用系统的 主窗口,提供菜 单命令,响应用 户的操作。
系统与外部设备建 立联系的后台作业 环境,负责驱动外 部设备,控制外部 设备的工作状态。
用来组建应用系统 的图形界面,为用 户提供漂亮、生动、 具有多种风格和类 型的操作画面。
应用系统的数据处理中心, 系统各部分均以实时数据 库为数据公用区,进行数 据交换、数据处理和实现 数据的可视化处理。
NO.2
第一章 组态软件概述
NO.3
工控组态软件
第一章 组态软件概述
随着工业自动化水平的迅速提高和计算机在工业领域的广 泛应用,人们对工业自动化的要求越来越高。 把PC技术用于工业控制将会有成本低、可用资源丰富、易 开发等特点。
组态软件能够很好地解决传统工业控制软件存在的种种问 题,使用户能根据具体的控制对象和控制目的任意组态,完成 符合要求的自动化控制工程。
1.1组态软件概述1.2组态王软件的安装1.3组态王的使用入门(共64张PPT)
可扩展性为用户提供了在不改变原有系统的情况下,向系统内增加 新功能的能力,这种增加的功能可能来自于组态软件开发商、第三 方软件提供商或用户自身。增加功能最常用的手段是ActiveX 组件 的应用,目前还只有少数组态软件能提供完备的ActiveX 组件引入 功能及实现引入对象在脚本语言中的访问。
第二页,共六十四页。
下一页 返回(fǎnhuí)
1.1 组态(zǔ tài)软件概述
组态软件是指一些数据采集与过程控制的专用软件,它们是在自动控制 系统监控层一级的软件平台和开发环境,使用灵活的组态方式,为用户 提供(tígōng)快速构建工业自动控制系统监控功能的、通用层次的软件工 具。组态软件应该能支持各种工控设备和常见的通讯协议,并且通常应 提供分布式数据管理和网络功能。对应于原有的HMI 的概念,组态软 件应该是一个使用户能快速建立自己的HMI 的软件工具,或开发环境。 在组态软件出现之前,工控领域的用户通过手工或委托第三方编写HMI 应用,开发时间长,效率低,可靠性差;或者购买专用的工控系统,通 常是封闭的系统,选择余地小,往往不能满足需求,很难与外界进行数 据交互,升级和增加功能都受到严重的限制。
下一页 返回(fǎnhuí)
1.1 组态(zǔ tài)软件概述
⑤ 组态王:组态王是国内第一家较有影响的组态软件开发公司 (更早的品牌多数已经湮灭)。组态王提供了资源管理器式的操作 主界面,并且提供了以汉字作为关键字的脚本语言支持。组态王也 提供多种硬件驱动程序。
⑥ 力控:大庆三维公司的力控是国内较早就已经出现的组态软件 之一。32 位下的1.0 版的力控,在体系结构上就已经具备了较为明 显的先进性,其最大的特征之一就是其基于真正意义的分布式实时 数据库的三层结构,而且其实时数据库结构可为可组态的活结构。 在1999—2000 年期间,力控得到了长足的发展(fāzhǎn),最新推出的 2.0 版在功能的丰富特性、易用性、开放性和I/O 驱动数量,都得 到了很大的提高。
组态软件讲座PPT课件
停止按钮直接与电机进行数据连接,采用‘置0’属性。
第18页/共57页
思考?
通过置“1”和置“0”只能控制开关型变量的动作,那么对于一个数字量型 的输出信号,通过组态软件如何来控制??
实例:如何通过一个调节阀来控制储水池的液位,同时显示液位数值!
第22页/共57页
3、设置设备的基本属性
修改设备的名称
设定设备的工作状态,启动或停止 可以设定系统监控的同步性 设定设备的站号及地址
第23页/共57页
4、增加通道
第24页/共57页
5、通道连接
将组态软件中对应的参数与PLC的信号进行一 一对应,从而实现数据交换。
第25页/共57页
6、设备调试
第27页/共57页
四、动作效果设计
➢填充颜色 ➢边线颜色 ➢字符颜色 ➢水平移动 ➢垂直移动 ➢大小变化 ➢显示输出 ➢按钮输入 ➢按钮动作 ➢可见度 ➢闪烁效果
第28页/共57页
提示:
所谓的动画效果实际上是通过将图形的某些参 数与变量进行对应,当变量的值发生变化,图形相 应的参数就发生改变,从而从外部观察就会发现 出现动画效果。
第34页/共57页
新建工程
1、输入文件路径
2、输入工程名称与描述
第35页/共57页
3、进入指定的工程
4、进入开发界面
第36页/共57页
5、新建设备连接
6、为设备指定逻辑名称
第37页/共57页
7、选择通讯端口
8、指定设备的物理地址
第38页/共57页
9、设定通讯故障的恢复时间
10、完成设定
第39页/共57页
第1页/共57页
组态软件课程设计(DCS)
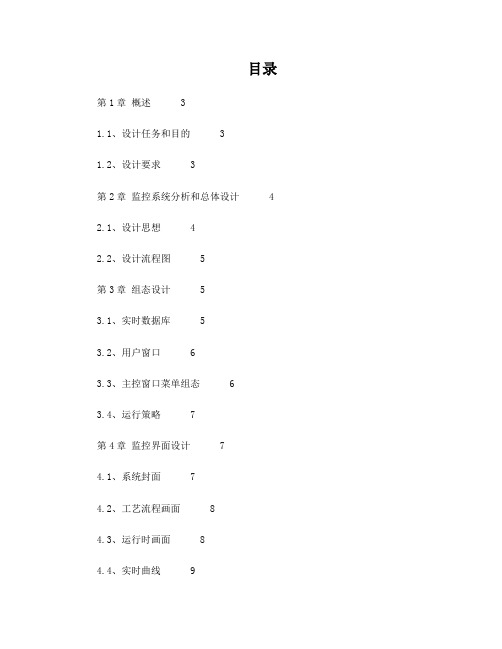
目录第1章概述 31.1、设计任务和目的 31.2、设计要求 3第2章监控系统分析和总体设计 4 2.1、设计思想 42.2、设计流程图 5第3章组态设计 53.1、实时数据库 53.2、用户窗口 63.3、主控窗口菜单组态 63.4、运行策略 7第4章监控界面设计 74.1、系统封面 74.2、工艺流程画面 84.3、运行时画面 84.4、实时曲线 94.5、实时数据 94.6、历史曲线 94.7、历史数据 104.8、实时报警画面 104.9、报警信息浏览 104.10、参数设置画面 11第5章运行策略 115.1、启动策略 115.2、循环策略 125.3、PID控制算法 135.4、报警策略 145.5、报警数据 145.6、历史数据 155.7、水箱对象 15第6章安全策略 166.1、本系统安全机制要求 16 6.2、定义用户和用户组 166.3、系统权限管理 176.4、操作权限管理 176.5、运行时进行权限管理 17 6.6、保护工程文件 186.7、打开时画面 186.8、登陆时画面 196.9、退出时画面 196.10、用户管理画面 196.11、修改密码画面 20第7章程序调试 207.1、程序调试中遇到的问题 20 7.2、解决方法和结果 20第8章课程设计总结 21第9章参考资料 21第1章概述1.1 设计任务和目的本课程设计要求在修完《监控系统程序设计技术》课程后,运用工业监控系统组态软件(MCGS),结合一个自动控制系统,完成该控制系统的上位机监控系统组态设计。
以便掌握监控软件的设计和编程方法,得到计算机监控系统程序设计与调试,以及编写设计技术文件的初步训练,为从事计算机控制方面的工作打下一定基础。
1.2 设计要求1.基本要求(1)监控系统总体设计了解系统设计要求,进行需求分析,确定组态软件输入输出点、内部变量等,构思监控系统的组态框架。
(2)实时数据库组态根据所确定的输入输出点和内部变量点,建立监控系统实时数据库。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5. 通信配置
❖ (1)按照I/O分配表进行相应物理硬件线路的连接, 并连接PAC与电脑之间的网线以及与以太网模块之 间的网线。
❖ (2)打开电源,确保PAC与电脑连接上(右击网络 \属性\查看链接状态),并查看或设置电脑IP地址 (比如192.168.1.50),必须保证电脑的网络地 址和PAC的以太网通信模块的地址在同一网段内。
LOGO
4.过程序判别最短路径,
自动选择正转还是反转; ❖ (2)开机时,刀盘自动复位在1号刀位,需要一个
初始扫描(#FST_SCN)给刀盘复位; ❖ (3)实际机床中要防止错选刀号,即需要一直按着
按钮才能达到所选位置。 ❖ 程序设计在GE PAC的编程软件PME中来实现。其
LOGO
❖ 3.I/O地址分配 ❖ 该任务实现借助于GE PAC控制器来实现,其I/0地
址分配表如表6-1所示。 ❖ 表6-1加工中心刀库捷径方向选择控制I/O地址分配
表
❖ 器件号地址器件号地址器件号地址当前位1I00081 按钮1I00089反转Q00001当前位2I00082按钮 2I00090正转Q00002当前位3I00083按钮 3I00091到位Q00003当前位4I00084按钮 4I00092当前位5I00085按钮5I00093当前位 6I00086按钮6I00094当前位7I00087按钮 7I00095当前位8I00088按钮8I00096
LOGO
6.1.2 任务实现
❖ 1. 任务实现工作原理 ❖ 刀库模块中每个刀位下有一个霍尔元器件,当转盘上的黄条遮挡住某
一个霍尔开关时,与霍尔开关相对应的当前位输入端为低电位。刀位 选择按钮分别对应每个刀位,按钮按下时,输入端为高电位。其中正 转、反转、到位指示灯为输出端,当其中一个为高电位时其对应的指 示灯亮。 ❖ 2.程序算法 ❖ 该设计中有八个刀位,要求刀盘按就近原则旋转。因此需要将当前刀 位的数值存储在数字寄存器存储区域R1中,所要选择的刀位数值存储 在R2中。可以分为以下三种情况进行设计。 ❖ (1)R1<R2 ❖ 将R1+8-R2存在R4,当R4>=4时应为正转,当R4<4时应为反 转。 ❖ (2)R1=R2 ❖ 恰好当前位置和选择位置一致,刀盘保持不动,到位指示灯亮。 ❖ (3)R1>R2 ❖ 将R2+8-R1存在R6,当R6<=4时应为正转当R6>4时应为反转。
LOGO
6.1.3 触摸屏与PAC的通信控制
❖ QuickPanel View/Control是当前最先进的紧凑 型控制计算机,根据不同型号集成有单色或彩色的平 面面板。它提供不同的配置来满足使用的要求,既可 以作为全功能的HMI(人机界面),也可以作为 HMI与本地控制器和分布式控制应用的结合。
LOGO
(3)启动PME软件,进行相应的硬件配置, 如图所示
LOGO
(4)PME中临时IP的设置
❖ •在工作界面中点击“/U……”,打开后点击“Set Temporary IP Address”弹出如图6-7对话框,填写PLC 上的IC695ETM001的MAC地址以及临时IP地址(如 192.168.1.60)。配置完成后单击“Set IP”一分钟左右出 现“IP change SUCCESSFUL”,此时应确保CPU处在停 止状态。
第6章 应用实例
第6章 应用实例
6.1 加工中心刀库捷径方向选择控制 6.2 三层电梯控制
LOGO
6.1 加工中心刀库捷径方向选择控制
❖ 6.1.1 任务要求 ❖ 6.1.2 任务实现 ❖ 6.1.3 触摸屏与PAC的通信控制 ❖ 6.1.4 iFIX与PAC的通信控制 ❖ 6.1.5 设计问题解决
编写的程序如图6-2所示。
LOGO
说明:图6-2程序的1-8行为当前位扫描, 即把当前位数值存入R1中
LOGO
说明:图6-3程序的9-16行为刀号选择扫 描,并把选择数值存在R2中
LOGO
R1<R2和R1>R2时运算处理的梯形图
LOGO
初始扫描,对正反转进行输出控制的梯形图
LOGO
❖ 说明:程序中的18行是实现 R1<R2 时的程序, 19行是实现R1>R2程序,20行是实现R1=R2的 程序,21行是实现初始扫描,对正反转进行输出控 制。
LOGO
❖ •在Hardware(硬件配置)中点击 IC695ETM001,在IP Address中填写刚才设置 的临时IP(192.168.1.60),如图所示。
LOGO
❖ •Navigator下右击Target1,在下拉菜单中选择Inspector,
弹出Inspector对话框,将Physical Port设置成 ETHERNET,在IP Address中键入刚才设置的临时IP (192.168.1.60)。如图所示。注意:此处所设的三个IP地 址相同,但要与电脑在同一个网段,且不相同。并且在设定临 时IP时,一定要分清PAC、PC和触摸屏三者间的IP地址关系, 要在同一个IP段内,而且两两不可以重复。
LOGO
❖ (5)完成以上设置后即可进行程序的编译、下载、 运行,如图6-10所示。
❖ 点击图6-10中的1进行检查程序,无误后点击2建立 起计算机与PAC RX3i之间的通信联系,此时3变绿, 点击3(CPU此时应处于停止状态),再依次点击4、 5进行程序和硬件配置下载。正确无误后Target1前 的菱形变绿。此时可将CPU转换为RUN状态,点击 按钮可以在线查看控制效果。
LOGO
LOGO
❖ 其需要完成以下的功能: ❖ 开机时,刀盘自动复位在1号刀位,操作者可以任意
选择刀号。比如,现在选择3号刀位(并按住,实际 机床中主要防止错选刀号),程序判别最短路径,是 正转还是反转,那这时,刀盘应该正转到3号刀位, 到位后,会看到到位信号灯常亮,告知刀已选择,此 时,松开选择按钮。如选择6、7、8号刀,则情况反 之。
LOGO
6.1 加工中心刀库捷径方向选择控制
❖ 6.1.1 任务要求 ❖ 如图6-1所示为模拟数控加工中心的刀库,它由步进
电机或直流电机控制,在其上面设有8把刀,分别在 1、2、3……8个刀位,每个刀位有霍尔开关一个。 刀库由小型直流减速电机带动低速旋转,转动时,刀 盘上的磁钢检测信号,反映刀号位置