ADT-853运动控制卡
BLC-853_V1.0_CN说明书
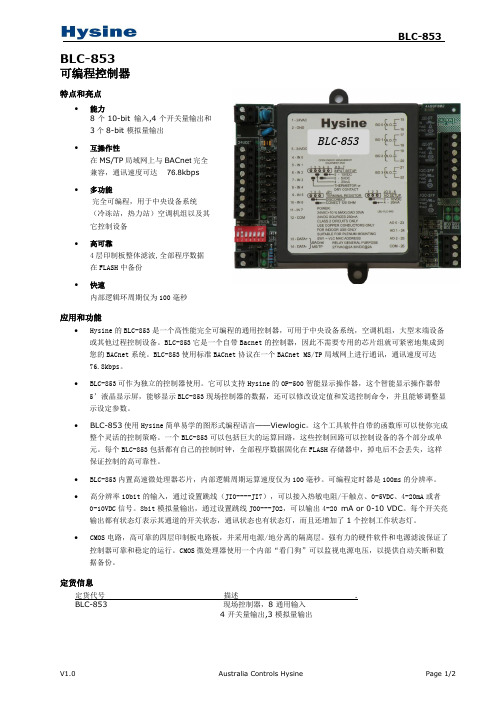
BLC-853BLC-853BLC-853 可编程控制器特点和亮点∙能力8个10-bit 输入,4个开关量输出和3个8-bit 模拟量输出 ∙互操作性在MS/TP 局域网上与BACne t 完全兼容,通讯速度可达 76.8kbps ∙多功能完全可编程,用于中央设备系统(冷冻站,热力站)空调机组以及其它控制设备 ∙高可靠4层印制板整体滤波,全部程序数据在FLASH 中备份 ∙快速内部逻辑环周期仅为100毫秒应用和功能∙Hysine 的BLC-853是一个高性能完全可编程的通用控制器,可用于中央设备系统,空调机组,大型末端设备或其他过程控制设备。
BLC-853它是一个自带Bacnet 的控制器,因此不需要专用的芯片组就可紧密地集成到您的BACnet 系统。
BLC-853使用标准BACnet 协议在一个BACnet MS/TP 局域网上进行通讯,通讯速度可达76.8kbps 。
∙BLC-853可作为独立的控制器使用。
它可以支持Hysine 的OP-500智能显示操作器,这个智能显示操作器带5’液晶显示屏,能够显示BLC-853现场控制器的数据,还可以修改设定值和发送控制命令,并且能够调整显示设定参数。
∙BLC-853使用Hysine 简单易学的图形式编程语言──Viewlogic 。
这个工具软件自带的函数库可以使你完成整个灵活的控制策略。
一个BLC-853可以包括巨大的运算回路,这些控制回路可以控制设备的各个部分或单元。
每个BLC-853包括都有自己的控制时钟,全部程序数据固化在FLASH 存储器中,掉电后不会丢失,这样保证控制的高可靠性。
∙ BLC-853内置高速微处理器芯片,内部逻辑周期运算速度仅为100毫秒。
可编程定时器是100ms 的分辨率。
∙高分辨率10bit 的输入,通过设置跳线(JI0----JI7),可以接入热敏电阻/干触点、0-5VDC 、4-20mA 或者0-10VDC 信号。
ADT-8840硬件说明书

8
ADT-8840 控制卡用户手册
�
Axis Y 端口定义(Y 轴脉冲与方向)
JCP2 PUCOM EXT_VCCA +24V 24VGND Y ECA+ YECAY ECB+ YECB1 9 2 10 3 11 4 12 5 13 6 14 7 15 8 DB15 15 ( ) YPU+ YPUYDR+ YDRY ALARM OUT19 YECZ+ YECZ-
线号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
名称 YPU+ YPUYDR+ YDRYALARM (IN35) OUT19 YECZ+(IN39) YECZ-(IN39) EYT_VCCA +24V 24VGND YECA+(IN44) YECA-(IN44) YECB+(IN45) YECB-(IN45) Y 轴脉冲信号+ Y 轴脉冲信号Y 轴方向信号+ Y 轴方向信号-
� 电气规格
开关量输入:
通道:32 ,全部光耦隔离。 输入电压:5-24V 高电平>4.5V 低电平<1.0V 隔离电压:2500V DC 光耦输入延时时间:不大于 0.1ms
计数输入:
通道:4AB 相编码输入 ,全部光耦隔离。 (与 8 个输入开 关量复用) 。 最高计数频率:2MHz 输入电压:5-24V 高电平>4.5V 低电平<1.0V 隔离电压:2500V DC
3
第二章
电气连接
� JB 端口定义(17-33 输入)
4
ADT-8840 控制卡用户手册 线号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 名称 INCOM2 IN17 IN18 IN19 IN20 IN21 IN22 IN23 IN24 IN25 IN26 IN27 IN28 IN29 IN30 IN31 IN32 IN33 普通输入 17 ~ 33 (注意它的顺序,请参考板上丝印) 功能 输入公共端 2(请将它接到+12V 到+24V 电源)
西门子S7-1500 CPU 1511-1 PN SIMATIC说明书

楏㚘㿜⼝俙䒽CPU 1511-1 PN SIMATICS7-150011/2022 6ES7511-1AL03-0AB0SIMATICS7-1500CPU 1511-1 PN(6ES7511-1AL03-0AB0)设备手册11/2022A5E40869835-ACSiemens AGDigital Industries Postfach 48 4890026 NÜRNBERG 德国A5E40869835-ACⓅ 10/2022 本公司保留更改的权利Copyright © Siemens AG 2017 - 2022.保留所有权利法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用 Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
下围棋机器人手臂设计
3.1. 机器人手爪的设计 ........................................................................................7 3.1.1. 手指的设计..........................................................................................7 3.1.2. 锥形块的设计及弹簧的选择 ...............................................................7 3.1.3. 电磁铁的选择 ......................................................................................8 3.1.4. 手爪外壳尺寸设计 ..............................................................................8
1.1. 引言 ...............................................................................................................1 1.2. 国内外发展概况 ............................................................................................1
众为兴运动控制卡ADT-8949G1在智慧药房自动摆药机上的应用
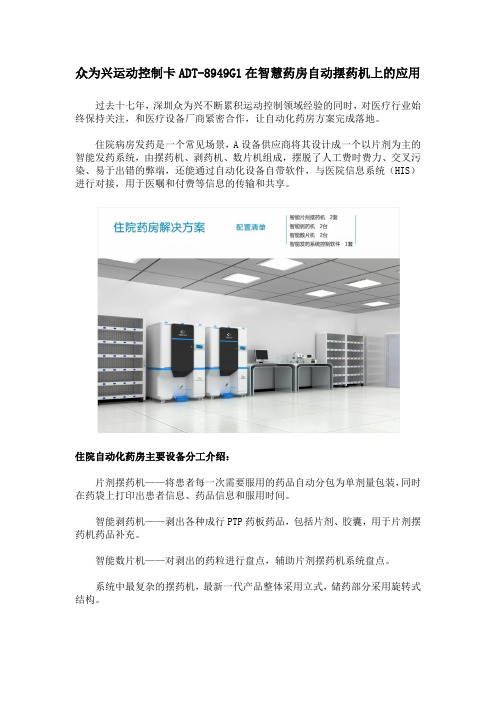
众为兴运动控制卡ADT-8949G1在智慧药房自动摆药机上的应用过去十七年,深圳众为兴不断累积运动控制领域经验的同时,对医疗行业始终保持关注,和医疗设备厂商紧密合作,让自动化药房方案完成落地。
住院病房发药是一个常见场景,A设备供应商将其设计成一个以片剂为主的智能发药系统,由摆药机、剥药机、数片机组成,摆脱了人工费时费力、交叉污染、易于出错的弊端,还能通过自动化设备自带软件,与医院信息系统(HIS)进行对接,用于医嘱和付费等信息的传输和共享。
住院自动化药房主要设备分工介绍:片剂摆药机——将患者每一次需要服用的药品自动分包为单剂量包装,同时在药袋上打印出患者信息、药品信息和服用时间。
智能剥药机——剥出各种成行PTP药板药品,包括片剂、胶囊,用于片剂摆药机药品补充。
智能数片机——对剥出的药粒进行盘点,辅助片剂摆药机系统盘点。
系统中最复杂的摆药机,最新一代产品整体采用立式,储药部分采用旋转式结构。
机器可以放置多达616个药盒,足以应付医院存储药品种类多的现状。
药盒具备双重核对与记忆功能,可随处摆放位置,补药快速,发药准确。
外摆药槽共144个,减少人为干预,提高摆药效率。
和HIS系统(医院信息系统)对接,将医嘱信息准确及时传达给设备,医生同时也能随时监控药品数量。
智能发药系统-摆药工作原理如下图所示:整个设备为了实现精确的运动控制,控制系统设计成工控机+板卡的方案。
A 厂商经过再三比较评估,其中运动控制卡采用了众为兴ADT-8949G1这款产品。
△众为兴控制卡ADT-8949G1接线示意图ADT-8949G1支持8个轴高速点位运动及轨迹运动规划功能,具有优秀的速度控制:支持T型、S型和E型多种加减速,短时间内让设备加速到工作速度,同时确保设备加时的平稳性。
此外,还具有电子齿轮,电子凸轮同步运动规划功能,直线插补、圆弧插补规划功能,样条曲线、跟随等功能。
特别适用于高速、高精度精确位置控制要求的场合,比如检测、半导体封装、机械手臂、点胶、包装、雕刻、PCB加工等。
深圳市众为兴数控技术 ADT-852 三轴运动控制卡 说明书

ADT-852三轴运动控制卡用户手册深圳市众为兴数控技术有限公司ADT-852三轴运动控制卡用户手册1版权声明本用户手册的所有部分其著作财产权归属众为兴数控技术有限公司以下简称众为兴所有末经众为兴许可任何人不可任意地仿制拷贝誊抄或转译本用户手册没有任何形式的担保立场表达或其他暗示若有任何因本用户手册或其所提到之产品的所有信息所引起的直接或间接的资料流出利益损失或事业终止众为兴及其所属员工恕不担负任何责任除此之外本用户手册提到的产品规格及资料仅供参考内容有可能会更新恕不另行通知商标声明用户手册中所涉及到的产品名称仅作识别之用而这些名称可能是属于其它不同的商标或版权在此声明如下INTEL PENTIUM是INTEL公司的商标WINDOWS MS DOS是 MICROSOFT公司产品标识ADT852是众为兴公司的商标其它末提到的标识均属各注册公司所拥有版权所有不得翻印众为兴数控技术有限公司ADT-852三轴运动控制卡用户手册2 目录一概要----------------------------------------------3 二硬件安装------------------------------------------4 三电气连接------------------------------------------5 四软件安装-----------------------------------------13五 ADT852库函数列表--------------------------------20六 ADT852库函数详解--------------------------------21 七运动控制开发编程示例-----------------------------25备注本说明书适用于ADT-852卡之C版ADT-852三轴运动控制卡用户手册3一 概要产品简介ADT852卡是基于PCI 总线的三轴伺服/步进控制卡脉冲输出方式可为脉冲+方向方式最大脉冲频率50KHz 位置管理采用计数器位数高达32位最大范围–2,147,483,648~+2,147,483,647 速度控制可用定速和直线加减速每轴有8个输入信号包括2个正负限位信号6个通用输入信号提供DOS WINDOWS95/98/NT/2000开发库可用VC++VB BC++等进行软件开发主要性能3轴伺服/步进电机控制每轴可独立控制互不影响 PCI 总线 即插即用最大脉冲输出频率为200KHz 脉冲输出为脉冲+方向方式 3轴32位计数最大计数范围-2,147,483,648~+2,147,483,647 直线加/减速 2-3轴直线插补运动中可以实时读出逻辑位置驱动速度每轴有8入4出数字I/O 除2个限位信号外均可作为通用I/O 使用数字输出可用于伺服开启伺服报警复位等信号 支持DOS WINDOWS95/98/NT/2000等操作系统应用范围1 PCB 钻孔铣边2 基于PC 的数控系统ADT-852三轴运动控制卡用户手册4二硬件安装一检查配件1 ADT-852 用户手册本手册2ADT-852 四轴PCI总线高性能运动控制卡3 ADT-852 用户光盘4 ADT-9137 37芯信号接线板1块5 ADT-D37 37芯屏蔽连接线1条6 ADT-9137 37芯信号接线板1块选件7 ADT-D37 37芯屏蔽连接线1条选件8 ADT-9125 25芯开关信号接线板1块选件9 ADT-D25 25芯屏蔽连接线1条选件10 ADT-DB25 25芯扁平线1条选件11ADT-DB37 37芯扁平线1条选件二安装1关闭电脑电源注ATX电源需总电源关闭2打开电脑机箱后盖3选择一条未占用的PCI插槽,插入ADT-852卡4检查ADT-852卡的金手指是否完整插入PCI插槽,拧整螺丝5根据用户情况决定是否安装J2J4接口线ADT-852三轴运动控制卡用户手册5三 电气连接一块Adt852卡有三个输入/输出接口其中J1J4为37针插座J2为25针插座J1为X Y Z 轴的脉冲输出开关量输入和开关量输出OUT0-OUT5的信号接线J4为开关量输入的信号接线J2为开关量输出OUT6-OUT15信号的接线 信号定义如下ADT-852三轴运动控制卡用户手册J1 线号说明6 ADT-852三轴运动控制卡用户手册 7线号 符号 说明1 XPU+/CW+ X 脉冲信号+2 XPU-/CW- X 脉冲信号-3 XDR+/CCW+ X 方向信号+4 XDR-/CCW- X 方向信号-5 YPU+/CW+ Y 脉冲信号+6 YPU-/CW- Y 脉冲信号-7 YDR+/CCW+ Y 方向信号+8 YDR-/CCW- Y 方向信号-9 ZPU+/CW+ Z 脉冲信号+ 10 ZPU-/CW-Z 脉冲信号-11 ZDR+/CCW+ Z 方向信号+ 12 ZDR-/CCW- Z 方向信号- 13 VCC 内部+5V 电源正端 不可接外接电源 14 VCC 内部+5V 电源正端 不可接外接电源 15 VCC 内部+5V 电源正端 不可接外接电源 16 INCOM1 光耦输入公共端下面的信号17 IN0XLMT+ X 正向限位信号 18 IN1XLMT- X 反向限位信号19 IN2 通用输入信号2 20 IN3 通用输入信号321 IN8YLMT+ Y 正向限位信号 22 IN9YLMT- Y 反向限位信号23 IN10 通用输入信号10 24 IN11 通用输入信号1125 IN16ZLMT+ Z 正向限位信号26 IN17ZLMT- Z 反向限位信号27 IN18 通用输入信号18 28 IN19通用输入信号19ADT-852三轴运动控制卡用户手册8 29 GND 内部电源地线 30 EXT_GND 外部电源地线31 OUT0 32 OUT1 33 OUT2 34 OUT3 35 OUT4 36 OUT5 开关量输出点37 +12V 内部+12V 电源正端 不可接外接电源J2 线号说明ADT-852三轴运动控制卡用户手册 9线号 符号 说明1 OUT62 OUT73 OUT84 OUT95 OUT106 OUT117 OUT128 OUT139 OUT14 10 OUT15开关量输出点11 NC 未用 12 NC 未用 13 NC 未用 14 NC 未用 15 NC 未用 16 NC未用 17 EXT_GND 18 EXT_GND 19 EXT_GND20 EXT_GND 21 EXT_GND 22 EXT_GND 23 EXT_GND 外部电源地线卡内部已经短接24 GND 内部电源地线 25 VCC 内部+5V 电源正端J4线号说明11线号 符号说明1 IN4 通用输入信号42 IN5 通用输入信号53 IN6 通用输入信号64 IN7 通用输入信号75 INCOM2 光耦输入公共端IN4-IN76 IN12 通用输入信号127 IN13 通用输入信号138 IN14 通用输入信号149 IN15 通用输入信号1510 INCOM3 光耦输入公共端IN12-IN1511 IN20 通用输入信号20 12 IN21 通用输入信号21 13 IN22 通用输入信号22 14 IN23 通用输入信号2315 INCOM4 光耦输入公共端IN20-IN2316 IN24 通用输入信号24 17 IN25 通用输入信号25 18 IN26 通用输入信号26 19 IN27 通用输入信号2720 INCOM5 光耦输入公共端IN24-IN2721 IN28 通用输入信号28 22 IN29 通用输入信号29 23 IN30 通用输入信号30 24 IN31 通用输入信号3125 INCOM6 光耦输入公共端IN28-IN3126 NC 未用 27 NC 未用 28 NC未用29 GND 内部电源地线30 GND 内部电源地线31 GND 内部电源地线32 VCC 内部+5V电源正端不可接外接电源33 VCC 内部+5V电源正端不可接外接电源34 VCC 内部+5V电源正端不可接外接电源35 +12V 内部+12V电源正端不可接外接电源36 +12V 内部+12V电源正端不可接外接电源37 +12V 内部+12V电源正端不可接外接电源a脉冲/方向输出信号的连接脉冲输出为差动输出方式可与步进/伺服驱动器很方便的连接下图为脉冲与方向的阳极已连通的接法13下图为脉冲与方向信号独立的接法建议采用此种方法因为是差动接法抗干扰性强b数字输入的连接c数字输出的连接15一 软件安装ADT852卡在WINDOWS95/98/NT/2000下必须安装驱动程序才能使用在DOS 下则无须安装驱动程序WIN95/98下驱动程序的安装以下用Windows98中文版为例说明驱动程序的安装在将ADT852卡安装到电脑上的PCI 插槽后电脑开机后应发现新硬件出现如下图的提示单击下一步后出现如下画面按上图所示选择再单击下一步出现如下画面以上假设E盘为光盘按上图输入路径或者使用浏览寻找ADT850.INF文件所在的路径单击下一步后应出现如下画面17单击下一步后出现如下画面单击完成后即完成ADT852卡的安装Winnt下驱动程序的安装Win2000下驱动程序的安装以下用Windows2000 Professional 中文版为例说明驱动程序的安装其余版本的 Windows2000与此类似在将ADT852卡安装到电脑上的PCI插槽后开机时应以管理员身份登陆电脑开机后应发现新硬件出现如下图的提示然后出现如下画面单击下一步后再显示如下画面19按上图选择后再单击下一步后出现如下画面再按上图选择指定一个位置单击下一步出现如下画面以上假设E盘为光盘或者使用浏览寻找ADT850.INF文件所在的路径单击确定后应出现如下画面20 21单击”下一步”后出现如下画面单击完成后即完成ADT852卡的安装22 二 ADT852库函数列表int init_board();int set_startv(int axis,unsigned long v); int set_speed(int axis,unsigned long v); int set_add(int axis,unsigned long v); int set_mode(int axis,int v);int set_inp_startv(unsigned long v); int set_inp_speed(unsigned long v); int set_inp_add(unsigned long v);int pmove(int axis,long pos); int sudden_stop(int axis); int dec_stop(int axis);int inp_move2(int axis1,int axis2,long pos1,long pos2);int inp_move3(int axis1,int axis2,int axis3,long pos1,long pos2,long pos3);int get_status(int axis,int *value);int get_speed(int axis,unsigned long *speed); int get_pos(int axis,long *pos); int reset_pos(int axis);int write_bit(int a,int v); int read_bit(int a);23三ADT852库函数详解1.初始化adt852卡 int init_board(void); 返回值 0正确 1错误可能未插卡或地址设置不正确 2.设置起始速度int set_startv(int axis,unsigned long v); axis 轴号1-3v 起始速度值范围20-50000 返回值 0正确 1参数错误 2卡错误3.设置驱动速度int set_speed(int axis,unsigned long v); axis 轴号1-3v 驱动速度值范围20-50000 返回值 0正确 1参数错误 2卡错误4.设置加速度int set_add(int axis,unsigned long v); axis 轴号1-3 v 加速度值 返回值 0正确 1参数错误 2卡错误5.设置驱动模式int set_mode(int axis,int v); axis 轴号1-3v 0正逻辑 1负逻辑 返回值 0正确 1参数错误 2卡错误如果驱动方向与实际方向相反可用此函数将运动方向反转6.设置插补起始速度24int set_inp_startv(unsigned long v); v 起始速度值范围20-50000 返回值 0正确 1参数错误 2卡错误7. 设置插补驱动速度int set_inp_speed(unsigned long v);v 驱动速度值范围20-50000 返回值 0正确 1参数错误 2卡错误8. 设置插补加速度int set_inp_add(unsigned long v); v 加速度值 返回值 0正确 1参数错误 2卡错误9. 定量驱动int pmove(int axis,long pos); axis 轴号1-3pos 脉冲数范围-268435455 to 268435455 返回值 0正确 1参数错误 2卡错误10. 立即停止驱动int sudden_stop(int axis); axis 轴号1-3 返回值 0正确 1参数错误 2卡错误11. 减速停止驱动int dec_stop(int axis); axis 轴号1-3 返回值 0正确 1参数错误 2卡错误12. 两轴直线插补int inp_move2(int axis1,int axis2,long pos1,long pos2); axis1,axis2 轴号1-3 pos1,pos2 脉冲数25返回值 0正确 1参数错误 2卡错误13. 三轴直线插补int inp_move3(int axis1,int axis2,int axis3,long pos1,long pos2,long pos3);axis1,axis2,axis3 轴号1-3pos1,pos2,pos3 脉冲数 返回值 0正确 1参数错误 2卡错误14. 获取轴状态int get_status(int axis,int *value); axis 轴号1-3 value 状态值的指针 1正在驱动 0驱动结束 返回值 0正确 1参数错误 2卡错误15. 获取轴当前速度int get_speed(int axis,unsigned long *speed); axis 轴号1-3 value 速度值的指针 返回值 0正确 1参数错误 2卡错误16. 获取当前位置int get_pos(int axis,long *pos); axis 轴号1-3 value 位置值的指针 返回值 0正确 1参数错误 2卡错误17. 当前位置清零int reset_pos(int axis); axis 轴号1-3 返回值 0正确 1参数错误 2卡错误18. 输出单点26 int write_bit(int a,int v);a 输出点0-15v 0低1高返回值0正确1参数错误2卡错误输出数对应接线图相应的输出号19. 读单个输入点int read_bit(int a);a 输入点0-31返回值0低电平1高电平-1错误输入点数含义如下IN0X轴正限位IN1X轴负限位IN8Y轴正限位IN9Y轴负限位IN16Z轴正限位IN17Z轴负限位其余与接线图对应为通用输入点27四运动控制开发编程示例所有函数均为立即返回而不是等待驱动结束后才返回所有驱动操作都是由ADT852卡完成上位机主要做实时监控及界面处理的工作1开发DOS 下的运动控制系统Borland C++ 3.1DOS 下的开发库共有三个文件在配套光盘的\adt852\dos\lib\目录下一个是头文件adt852.h 另外两个是库函数一个是大模式库adt852l.lib large memory model 一个是巨模式库adt852h.lib huge memory model 可根据不同的编译环境选择a 单轴定量匀速运动 目的让X 轴的步进电机以1000 pps 的速度运动10000步程序如下#include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT852卡 //以下只对X 轴操作set_startv(1,1000);set_speed(1,1000); //如果起始速度大于或等于驱//动速度则为匀速运动pmove(1,10000); //开始驱动 int s; while(1) {get_status(1,&s); //读驱动状态 if(s==0)break; //驱动结束跳出28…… //可执行读键盘显示位置等函数 } return ; }b 单轴定量加/减速运动 目的 让X 轴以下列速度运动20000步 起始速度2000 pss 驱动速度20000 pss 加/减速度40000 pss程序如下#include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT832卡 // X 轴操作set_startv(1,400); //起始速度set_speed(1,4000); //驱动速度set_acc(1,40000); //加/减速度pmove(1,20000); //开始驱动 int s; while(1) {get_status(1,&s); //读驱动状态 if(s==0)break; //驱动结束跳出 …… //可执行读键盘显示位置等函数 } return ; }c 多轴运动29以上虽为单轴操作但实际上可同时设置另外几轴的数据互相之间并不影响如在X 轴驱动时设置好Y 轴的参数然后驱动Y 轴对X 轴的运动不会有任何影响如此可独立操作san 三轴d 两轴直线插补 直线插补与单轴运动基本类似 程序如下 #include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT832卡 set_inp_startv(1000); set_inp_speed(1000);inp_move2(1,2,10000,-20000); //X-Y 开始插补 //X 正向移动10000步 //Y 反向移动20000步 int s1,s2; while(1) {get_status(1,&s1); //读X 状态 get_status(2,&s2); //读Y 状态 if(s1==0 && s2==0)break; //结束跳出 …… //可执行读键盘显示位置等函数 } return ; }e 三轴直线插补 程序如下 #include “adt852.h” void main() {if(init_board()!=0) return; //未安装ADT832卡 set_inp_startv(1000); set_inp_speed(1000);ADT-852三轴运动控制卡用户手册30 inp_move3(1,2,3,10000,-20000,30000); //X-Y 开始插补 //X 正向移动10000步 //Y 反向移动20000步 // Z 正向移动30000步 int s1,s2,s3;while(1) {get_status(1,&s1); //读X 状态get_status(2,&s2); //读Y 状态get_status(2,&s3); //读Z 状态if(s1==0 && s2==0 && s3==0)break; //结束跳出…… //可执行读键盘显示位置等函数 }return ;}2用VB 开发WINDOWS 下的运动控制系统VB 下的开发库共有三个文件在配套光盘的\adt852\win\vb\目录下一个是动态库ADT852.DLL 一个是模块文件ADT852.BAS 一个是WindowsNT/2000使用的文件winio.sys 动态库中的函数已在模块文件ADT852.BAS 中有声明基本使用方法与DOS 下的编程相同详细的例子在用户光盘上3用VC 开发WINDOWS 下的运动控制系统VC 下的开发库共有三个文件在配套光盘的\adt852\win\vc\目录下一个是静态库ADT852.LIB 一个是头文件ADT852.H 一个是WindowsNT/2000使用的文件winio.sys 动态库中的函数已在头文件ADT852.H 中有声明基本使用方法与DOS 下的编程相同详细的例子在用户光盘上。
罗克韦尔 ControlLogix 系统 说明书
准备事宜 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 1756-L7x 控制器部件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
未随 1756-L6x 控制器提供的部件. . . . . . . . . . . . . . . . . . . . . . 33 1756-L6x 控制器安装. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 CF 卡的安装和取出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 电池的连接与更换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 将控制器插入机架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 将控制器从机架拆下 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
安装 1756-L7x 控制器 安装 1756-L6x 控制器
控制器使用入门
A-T Controls 38M 三路球阀说明书
This investment cast 3-way valve can be anSee automated data sheets for pre-sized assemblies Pneumatic ElectricRegular Port, L or T OptionPressure vs. Temperature Chartfor Valves 1/4” to 2”A-T Controls reserves the right to change product designs and technical/dimensional specifications without notice.9955 International Blvd.Cincinnati, Ohio PHONE (513) 247-5465FAX (513) 247-5462********************TEMPERATURE IN °F (°C)P R E S S U R E I N P S I GPRESSURE IN BAR1000(-18)-20(-28)0100(38)300200400800500600700900500(260)(149)200300(93)400(204) 6.9013.720.727.655.234.541.448.362.175.970.0600(316)NOTE: Dotted line shows the rating for valve body. Solid line shows the rating for valve seat. Both ratings need to be considered when determin-ing the limitation of the valve for specific application.Three-Way Threaded Ball Valve Regular Port, L or T Option 1000 psi 1/4” ro 2”Threaded 3-Way 9955 International Blvd.PHONE (513) 247-5465Valve Series End ConnectionSeat Material Valve SizeTriac Actuator Series Double Acting SolenoidLimit Switch Port Arrangement Actuator Size See part number matrix foritemized options38DA-20151105Copyright 2013 A-T Controls, Inc.Cincinnati, Ohio FAX (513) 247-5462********************Other options available - call for detailsSpecify flow pattern when ordering (see back)Actuators are sized based on clean/clear fluid.SAMPLE PART #38-TX-050/2R2D-XX-TValve SeriesEnd ConnectionSeat MaterialValve SizeTriac Actuator SeriesDouble ActingSolenoidLimit Switch Port ArrangementActuator SizeSee part number matrix foritemized options38-2R-20211203Copyright 2013 A-T Controls, Inc.38DA-20151105Copyright 2013 A-T Controls, Inc.38DA-20151105Copyright 2013 A-T Controls, Inc.PHONE (513) 247-5465Flow Patterns for L-Port38-TX-050/2R2D-XX-T Valve SeriesEnd ConnectionSeat Material Valve Size Triac Actuator SeriesDouble Acting SolenoidLimit Switch Port Arrangement Actuator SizeSee part number matrix for itemized options38SR-20151105Copyright 2013 A-T Controls, Inc.SAMPLE PART #38-TX-050/2R2S-XX-T Valve SeriesEnd ConnectionSeat MaterialValve Size Triac Actuator Series Spring ReturnSolenoidLimit Switch Port ArrangementActuator SizeCincinnati, Ohio FAX (513) 247-5462********************Specify flow pattern when ordering (see back)Actuators are sized based on clean/clear fluid.See part number matrix foritemized options38-2R-20211203Copyright 2013 A-T Controls, Inc.38SR-20151105Copyright 2013 A-T Controls, Inc.DIMENSIONS SHOWN ARE FOR ASSEMBLIES SIZED FOR 80 PSI SUPPLYActuators are sized based on clean/clear fluid.See part number matrix foritemized optionsFlow Patterns for L-PortSee part number matrix foritemized optionsFlow Patterns for L-PortValve SeriesEnd ConnectionSeat Material Valve Size On-Off Voltage Options Port Arrangement Triac Actuator Series Actuator Size9955 International Blvd.Cincinnati, Ohio 45246PHONE (513) 247-5465FAX (513) 247-546238EL-20151105Copyright 2013 A-T Controls, Inc.NOTE: Heater and thermostat standard (2) auxiliary switches standardOther options available - call for detailsActuators are sized based on clean/clear fluid.SAMPLE PART #38-TX-050/WEA1-XX-TValve SeriesEnd Connection Seat MaterialValve SizeOn-OffVoltage OptionsPort ArrangementTriac Actuator SeriesActuator SizeCincinnati, Ohio FAX (513) 247-5462********************38-2R-20211203Copyright 2013 A-T Controls, Inc.Flow Patterns for L-Port Valve Series End Connection Seat Material Valve SizeOn-Off VoltageOptionsPort Arrangement Triac Actuator Series Actuator Size38EL-20151105Copyright 2013 A-T Controls, Inc.Other options available - call for detailsActuators are sized based on clean/clear fluid.SAMPLE PART #38-TX-050/WEA1-XX-TFlow Patterns for L-PortValve SeriesEnd Connection Seat MaterialValve Size On-OffVoltage Options Port Arrangement Triac Actuator SeriesActuator SizeManual and automated valve assemblies for gas burner management applicationsand safety shutoffVarious Seat MaterialsPTFE, RTFE, 50/50 STFE, 25% CTFE, Delrin,PEEK, UHMWPE, TFM-1600Operator OptionsQuarter-turn Gear OperatorsSpring Return “Deadman” HandlesOval handles, TEE HandlesSpecials and SolutionsSteam JacketsStem ExtensionsV-ported Control ValvesMulti-port Valve SolutionsFugitive Emissions Bonnets (TSM’s)Oxygen CleaningLockout BracketsVented Balls“No Play” Mounting Kits• FM ApprovedValves and AssembliesSpecial SeatsBalls and Seal DesignsFloor MountedDamper DrivesFusible LinkAssembliesLockoutMounting KitsSpecialMulti-Port ValvesSteam JacketedValvesLimit SwitchesMounted on Manual Valves180º ActuatorsStem ExtensionsDual ValveAssembliesCincinnati, Ohio 45246FAX (513) 247-5462********************。
众为兴数控技术 ADT-856 六轴运动控制卡 说明书
ADT-856 六轴运动控制卡用户手册众为兴数控技术有限公司第 1 页 共 17 页版权声明本用户手册的所有部分其著作财产权归属众为兴数控技术有限公司以下简称众为兴所有末经众为兴许可任何人不可任意地仿制拷贝誊抄或转译本用户手册没有任何形式的担保立场表达或其他暗示若有任何因本用户手册或其所提到之产品的所有信息所引起的直接或间接的资料流出利益损失或事业终止众为兴及其所属员工恕不担负任何责任除此之外本用户手册提到的产品规格及资料仅供参考内容有可能会更新恕不另行通知商标声明用户手册中所涉及到的产品名称仅作识别之用而这些名称可能是属于其它不同的商标或版权在此声明如下INTELPENTIUM 是INTEL公司的商标WINDOWSMS DOS 是 MICROSOFT公司产品标识 ADT 856是众为兴公司的商标其它末提到的标识均属各注册公司所拥有版权所有不得翻印众为兴数控技术有限公司一 概要第 2 页 共 17 页产品简介ADT856卡是基于PCI 总线的高性能六轴伺服/步进控制卡支持一个系统中使用多达16块控制卡可控制96路伺服/步进电机支持即插即用位置可变环形可在运动中随时改变速度可使用连续插补等先进功能 脉冲输出方式可用单脉冲脉冲+方向或双脉冲脉冲+脉冲方式最大脉冲频率4MHz 采用先进技术使输出频率在很高的时候也能使频率误差小于0.1%位置管理采用两个加/减计数器一个用于内部管理驱动脉冲输出的逻辑位置计数器一个用于接收外部的输入输入信号可以是A/B 相输入的编码器或光栅尺也可是上/下脉冲的输入信号作为实际位置计数器计数器位数高达32位最大范围–2,147,483,648~+2,147,483,647外部输入也可用于手轮输入作为普通的计数 提供伺服接口信号如编码器信号到位信号INPOS报警信号ALARM 伺服开启SERVO ON 等 多种控制方式如定量运动连续运动回零运动多轴插补圆弧插补等插补一般用定速运动也可用直线/S 曲线加减速S曲线加减速不能用于圆弧插补插补带有连续插补功能即在插补过程中输入下一点的插补数据以保证脉冲的连续使插补达到更快更好的性能最大插补速度可达2Mhz速度控制可用定速和直线/S 曲线加减速可做非对称直线加减速可用自动/手动减速在定量驱动时可防止速度曲线产生三角波形每轴有2个32位比较寄存器用于产生中断或作为软件限位 每轴有8个输入信号包括2个正负限位信号3个停止信号1个伺服到位信号1个伺服报警信号和1个通用输入信号除限位信号外其余信号可通过设置成无效来作为通用输入信号3个停第 3 页 共 17 页 止信号可作为原点信号减速信号编码器Z 相搜寻使用所有数字输入信号均有积分型的滤波器可选8种滤波时间常数以防止干扰 中断可设置成在各种情况下产生如加/减速驱动的定速开始时定速完毕时驱动完毕时位置计数器和比较器之间的大小关系有变化时等等此外连续插补发生下一个数据请求时的中断提供DOS WINDOWS95/98/NT/2000开发库可用VC++VB BC++等进行软件开发主要性能32位PCI 总线即插即用6轴伺服/步进电机控制每轴可独立控制互不影响 脉冲输出的频率误差小于0.1%最大脉冲输出频率为4MHz脉冲输出可用单脉冲脉冲+方向或双脉冲脉冲+脉冲方式6轴均有位置反馈输入32位计数最大计数范围-2,147,483,648~+2,147,483,647直线或S 曲线进行加/减速非对称直线加/减速运动2-6轴直线插补CW CCW 圆弧插补可用连续插补功能最大驱动速度2MHz每轴都有2 个32位比较寄存器用于逻辑位置计数器或者实际位置计数器的位置大小比较可用于软件限位或产生中断可接收伺服马达驱动器的各种信号如2相编码器信号到位信号报警信号等每轴有3个STOP 信号可用于原点搜寻编码器Z 相搜第 4 页 共 17 页寻运动中可实时改变速度运动中可以实时读出逻辑位置实际位置驱动速度加速度加/减速状态加速中定速中减速中可编程中断可以由多种原因产生中断每轴有8入数字I/O 除2限位信号外均可作为通用I/O 使用数字输出共有32个可用于伺服开启伺服报警复位等信号每一个输入信号的输入端都装备积分型的滤波器可以设定哪一个输入信号的滤波器功能变为有效或无效滤波器的时间常数从8个种类里可以选择1个支持在一个系统中使用多达16个控制卡支持DOS WINDOWS95/98/NT/2000等操作系统应用范围 1 多轴雕铣系统 2 机器人系统 3 空间座标测量系统 4 基于PC 的数控系统二 硬件安装第 5 页 共 17 页一检查配件 1 ADT-856 用户手册本手册 2 ADT-856 四轴PCI 总线高性能运动控制卡 3 ADT-856 用户光盘 4 ADT-9137 37芯信号接线板2块 5 ADT-D37 37芯屏蔽连接线2条 6 ADT-DB37 37芯扁平线1条二 安装 1 关闭电脑电源注ATX 电源需总电源关闭 2 打开电脑机箱后盖 3 选择一条未占用的PCI 插槽,插入ADT-856 4 检查ADT-856的金手指是否完整插入PCI 插槽,拧整螺丝 5 根据用户情况决定是否安装J3J4接口线三 电气连接一块Adt850卡有四个输入/输出接口其中J1J2为37针插座J4为25针插座J3为40针排座J1为X Y Z 轴的脉冲输出开关量输入/输出的信号接线 J2为W U V 轴的脉冲输出开关量输入/输出的信号接线 J3为一些开关量输入和编码器输入信号的接线J4为开关量输出OUT12-OUT31信号的接线 J1J2所有信号均为光耦隔离J3的信号为不隔离的信号必须另加一块隔离电路板使用J4的信号为不隔离的开关量输出信号不加隔离板时输出电压建议采用+12V 电源信号定义如下第 6 页 共 17 页J1 线号说明线号 符号 说明 1 XPU+ X 脉冲信号+第 7 页 共 17 页 2 XPU- X 脉冲信号-3 XDR+ X 方向信号+4 XDR- X 方向信号-5 YPU+ Y 脉冲信号+6 YPU- Y 脉冲信号-7 YDR+ Y 方向信号+8 YDR- Y 方向信号-9 ZPU+ Z 脉冲信号+10 ZPU- Z 脉冲信号-11 ZDR+ Z 方向信号+12 ZDR- Z 方向信号-13 EXT_VCC 14 EXT_VCC15 EXT_VCC脉冲/方向信号输出+5V 端用于共阳极输入的驱动器 16 INCOM1 光耦输入公共端17 XLMT+ X 正向限位信号18 XLMT- X 反向限位信号19 XSTOP0 X 停止信号0可做通用输入信号 20 XSTOP1 X 停止信号1可做通用输入信号 21 YLMT+ Y 正向限位信号22 YLMT- Y 反向限位信号23 YSTOP0 Y 停止信号0可做通用输入信号 24 YSTOP1 Y 停止信号1可做通用输入信号 25 ZLMT+ Z 正向限位信号26 ZLMT- Z 反向限位信号27 ZSTOP0 Z 停止信号0可做通用输入信号 28 ZSTOP1 Z 停止信号1可做通用输入信号 29 EXTOUT_GND 输出信号公共地端第 8 页 共 17 页 30 EXTOUT_GND 输出信号公共地端31 OUT0 输出信号032 OUT1 输出信号133 OUT2 输出信号234 OUT3 输出信号235 OUT4 输出信号436 OUT5 输出信号537 NC 空脚J2 线号说明线号 符号 说明 1 WPU+ W 脉冲信号+第 9 页 共 17 页 2 WPU- W 脉冲信号-3 WDR+ W 方向信号+4 WDR- W 方向信号-5 UPU+ U 脉冲信号+6 UPU- U 脉冲信号-7 UDR+ U 方向信号+8 UDR- U 方向信号-9 VPU+ V 脉冲信号+10 VPU- V 脉冲信号-11 VDR+ V 方向信号+12 VDR- V 方向信号-13 EXT_VCC 14 EXT_VCC15 EXT_VCC脉冲/方向信号输出+5V 端用于共阳极输入的驱动器 16 INCOM2 光耦输入公共端17 WLMT+ W 正向限位信号18 WLMT- W 反向限位信号19 WSTOP0 W 停止信号0可做通用输入信号 20 WSTOP1 W 停止信号1可做通用输入信号 21 ULMT+ U 正向限位信号22 ULMT- U 反向限位信号23 USTOP0 U 停止信号0可做通用输入信号 24 USTOP1 U 停止信号1可做通用输入信号 25 VLMT+ V 正向限位信号26 VLMT- V 反向限位信号27 VSTOP0 V 停止信号0可做通用输入信号 28 VSTOP1 V 停止信号1可做通用输入信号 29 EXTOUT_GND 输出信号公共地端第 10 页 共 17 页 30 EXTOUT_GND 输出信号公共地端31 OUT6 输出信号632 OUT7 输出信号733 OUT8 输出信号834 OUT9 输出信号935 OUT10 输出信号1036 OUT11 输出信号1137 NC 空脚J3线号说明线号 符号说明1 XECA2 XECB3 XINPOS4 XSTOP25 YALARM6 XIN07 ZECA8 WECA9 ZINPOS10 ZSTOP211 WALARM12 ZIN013 UECA14 VECA15 UINPOS16 USTOP217 V ALARM18 UIN019 VCC20 GND21 YECA22 YECB23 XALARM24 YINPOS25 YSTOP226 YIN027 ZECB28 WECB第 11 页共 17 页29 ZALARM30 WINPOS31 WSTOP232 WIN033 UECB34 VECB35 UALARM36 VINPOS37 VSTOP238 VIN039 VCC40 GNDJ4线号说明线号符号说明1 OUT12 开关量输出点第 12 页共 17 页第 13 页 共 17 页 2 OUT133 OUT144 OUT155 OUT166 OUT177 OUT188 OUT199 OUT2010 OUT2111 OUT2212 OUT2313 OUT2414 OUT2515 OUT2616 OUT2717 OUT2818 OUT2919 OUT3020 OUT3121 GND 22 GND内部电源地线23 VCC 24 VCC内部+5V 电源正端25 +12V 内部+12V 电源正端a. 脉冲输出的接法脉冲输出为差动输出方式第 14 页 共 17 页可与步进/伺服驱动器很方便的连接下图为脉冲与方向的阳极已连通的接法下图为脉冲与方向信号独立的接法建议采用此种方法因为是差动接法抗干扰性强b. 数字输入的连接第 15 页 共 17 页c. 数字输出的连接输出为光耦隔离输出最大电流100mA J2的输出 注意如接感性负载如继电器电磁阀等应如图加上续流二极管否则易造成输出点的损坏第 16 页 共 17 页四 软件安装请参考Adt850说明书中的软件安装五 功能说明请参考Adt850说明书中的功能说明六 Adt856库函数列表请参考Adt850说明书中的库函数列表Adt856与Adt850库函数列表不同之处Adt856新增函数int adt856_initial();int adt856_end();int inp_move6(int cardno,long pulse1,long pulse2,long pulse3,longpulse4,long pulse5,long pulse6);Adt856废除函数int adt850_initial();int adt850_end();int read_di(int cardno,unsigned long *value);int write_do(int cardno,unsigned long value);七 Adt856库函数祥解请参考Adt856说明书中的库函数列表, Adt856与Adt850库函数祥解不同之处1. Adt856库函数的输入参数中若要求输入轴号轴号的范围可为1-6分别对应为X 轴Y 轴Z 轴W 轴U 轴V 轴 2 int adt856_initial()的功能及用法与int adt850_initial()相同4 int adt856_end()的功能及用法与int adt850_end()相同5 六轴直线插补int inp_move6(int cardno,long pulse1,long pulse2,long pulse3,long pulse4,long pulse5,long pulse6)cardno 卡号pulse1, pulse2,pulse3,pulse4,pulse5, pulse6X-Y-Z-W-U-V轴移动的相对距离返回值0正确1错误注意六轴插补的速度以X 轴速度为基准Z与U轴的倍率及驱动速度应设置和X 轴的倍率及驱动速度相同Z与U轴的初速度应设置成与X轴的驱动速度一样不是X 轴的初始速度Y W V无须设定第 17 页共 17 页。
★插卡式运动控制器--标准产品型号列表V1.140731 (1)
GE GE-400-PG-LP 标
GE-400-PG-LP
TH-4G2B-1616
ACC3-E1-062015 产品光盘 GE-400-SG-SF-PCI GE-400-SG-SF TH-4G2B-1616 ACC3-E1-062015 产品光盘 GE-400-SV-SF-PCI GE-400-SV-SF TH-4V2B-1616 ACC3-E1-062015 产品光盘 GE-400-SG-CF-PCI GE-400-SG-CF TH-4G2B-1616 ACC3-E1-062015 产品光盘 GE-400-SV-CF-PCI GE-400-SV-CF TH-4V2B-1616 ACC3-E1-062015 产品光盘
插卡式运动控制器标准产品型号列表
系列 运动控制器型号 部件(点击型号可跳转部件型号说
明)
更新时间:2014-8-14
GT GT-200-SV-PCI-X1 GT-200-SV-PCI 标 GA1-200-ACC2-X1
ACC3-A1-062015(×2) 产品光盘 GT-200-SG-PCI-X1 GT-200-SG-PCI GA1-200-ACC2-X1 ACC3-A1-062015(×2) 产品光盘 GT-200-SP-PCI-X1 GT-200-SP-PCI GA1-200-ACC2-X1 ACC3-A1-062015(×2) 产品光盘 GT-400-SV-PCI-X1 GT-400-SV-PCI GA1-400-ACC2-X1 ACC3-A1-062015(×2) 产品光盘 GT-400-SG-PCI-X1 GT-400-SG-PCI GA1-400-ACC2-X1 ACC3-A1-062015(×2) 产品光盘 GT-400-SP-PCI-X1 GT-400-SP-PCI GA1-400-ACC2-X1 ACC3-A1-062015(×2) 产品光盘 GT-400-SCAN-PCI- GT-400-SCAN-PCI G GT2-800-ACC2-Ver3.0-V ACC3-T1-068030 产品光盘 GE-200-SV-PCI-X1 GE-200-SV-PCI GA1-200-ACC2-X1 ACC3-A1-062015(×2) 产品光盘 GE-200-SG-PCI-X1 GE-200-SG-PCI GA1-200-ACC2-X1 ACC3-A1-062015(×2) 产品光盘
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章概要产品简介ADT853卡是基于PCI总线的高性能两轴运动+激光控制卡支持即插即用位置可变环形可在运动中随时改变速度可使用连续插补等先进功能脉冲输出方式可用单脉冲脉冲+方向或双脉冲脉冲+脉冲方式最大脉冲频率4MHz采用先进技术使输出频率在很高的时候也能使频率误差小于0.1%位置管理采用两个加/减计数器一个用于内部管理驱动脉冲输出的逻辑位置计数器一个用于接收外部的输入输入信号可以是A/B相输入的编码器或光栅尺也可是上/下脉冲的输入信号作为实际位置计数器计数器位数高达32位最大范围–2,147,483,648~+2,147,483,647外部输入也可用于手轮输入作为普通的计数提供伺服接口信号如编码器信号到位信号INPOS报警信号ALARM伺服开启SERVO ON等多种控制方式如定量运动连续运动回零运动多轴插补圆弧插补等插补一般用定速运动也可用直线/S曲线加减速S曲线加减速不能用于圆弧插补插补带有连续插补功能即在插补过程中输入下一点的插补数据以保证脉冲的连续使插补达到更快更好的性能最大插补速度可达2Mhz 速度控制可用定速和直线/S曲线加减速可做非对称直线加减速可用自动/手动减速在定量驱动时可防止速度曲线产生三角波形每轴有2个32位比较寄存器用于产生中断或作为软件限位每轴有8个输入信号包括2个正负限位信号3个停止信号1个伺服到位信号1个伺服报警信号和1个通用输入信号除限位信号外其余信号可通过设置成无效来作为通用输入信号3个停止信号可作为原点信号减速信号编码器Z相搜寻使用所有数字输入信号均有积分型的滤波器可选8种滤波时间常数以防止干扰提供一路PWM输出和一路8位D/A输出可用于激光强度控制提供DOS WINDOWS95/98/NT/2000开发库可用VC++VB BC++等进行软件开发主要性能32位PCI总线即插即用脉冲输出的频率误差小于0.1%最大脉冲输出频率为4MHz脉冲输出可用单脉冲脉冲+方向或双脉冲脉冲+脉冲方式2轴均有位置反馈输入32位计数最大计数范围-2,147,483,648~+2,147,483,647直线或S曲线进行加/减速非对称直线加/减速运动2轴直线插补CW CCW圆弧插补可用连续插补功能最大驱动速度2MHz每轴都有2 个32位比较寄存器用于逻辑位置计数器或者实际位置计数器的位置大小比较可用于软件限位或产生中断可接收伺服马达驱动器的各种信号如2相编码器信号到位信号报警信号等每轴有3个STOP信号可用于原点搜寻编码器Z相搜寻运动中可实时改变速度运动中可以实时读出逻辑位置实际位置驱动速度加速度加/减速状态加速中定速中减速中可编程中断可以由多种原因产生中断每轴有8入8出数字I/O除2限位信号外均可作为通用I/O使用数字输出可用于伺服开启伺服报警复位等信号每一个输入信号的输入端都装备积分型的滤波器可以设定哪一个输入信号的滤波器功能变为有效或无效滤波器的时间常数从8个种类里可以选择1个一路PWM输出100Hz-100KHz一路D/A输出8位0-10V支持在一个系统中使用多达16个控制卡支持DOS WINDOWS95/98/NT/2000等操作系统应用范围1激光雕刻2基于PC的两轴数控系统第二章硬件安装一检查配件1 ADT-853 用户手册本手册2 ADT-853 两轴PCI总线高性能运动控制卡3 ADT-853 用户光盘4 ADT-9137 37芯信号接线板1块5 ADT-D37 37芯屏蔽连接线1条6 ADT-9125 25芯开关信号接线板1块7 ADT-D25 25芯屏蔽连接线1条8ADT-DB25 25芯扁平线1条二安装1关闭电脑电源注ATX电源需总电源关闭2打开电脑机箱后盖3选择一条未占用的PCI插槽,插入ADT-8534检查ADT-853的金手指是否完整插入PCI插槽,拧整螺丝5根据用户情况决定是否安装P2接口线第三章电气连接一块Adt853卡有两个输入/输出接口其中P1为37针插座P2为25针插座P1为X Y轴的脉冲输出编码器输入8个开关量输入和7个开关量输出的信号接线P2为8个开关量输入9个开关量输出1路PWM输出和一路D/A输出的信号接线信号定义如下P1 线号说明线号符号说明1 XPU+/CW+X脉冲信号+2 XPU-/CW-X脉冲信号-3 XDR+/CCW+X方向信号+4 XDR-/CCW-X方向信号-5 YPU+/CW+Y脉冲信号+6 YPU-/CW-Y脉冲信号-7 YDR+/CCW+Y方向信号+8 YDR-/CCW-Y方向信号-9 VCC内部+5V电源正端不可接外接电源10 VCC内部+5V电源正端不可接外接电源11 INCOM1光耦输入公共端12 XLMT+X正向限位信号13 XLMT-X反向限位信号14 XSTOP0X停止信号0可做通用输入信号15 XSTOP1X停止信号1可做通用输入信号16 YLMT+Y正向限位信号17 YLMT-Y反向限位信号18 YSTOP0Y停止信号0可做通用输入信号19 YSTOP1Y停止信号1可做通用输入信号20 XECA+X编码器A相+21 XECA-X编码器A相-22 XECB+X编码器B相+23 XECB-X编码器B相-24 YECA+Y编码器A相+25 YECA-Y编码器A相-26 YECB+Y编码器B相+27 YECB-Y编码器B相-28 GND内部电源地线29 GND内部电源地线30 OUT0开关量输出点31 OUT132 OUT233 OUT334 OUT435 OUT536 OUT637 +12V内部+12V电源正端不可接外接电源P2 线号说明线号符号说明1 OUT72 OUT83 OUT94 OUT105 OUT116 OUT127 OUT138 OUT149 OUT1510 PWMOUT+脉宽调制PWM输出+11 PWMOUT-脉宽调制PWM输出+12 DAOUT模拟输出0-10V13 GND内部电源地线14 INCOM2光耦输入公共端15 XSTOP2X停止信号2可做通用输入信号16 XINPOSX伺服到位信号可做通用输入信号18 XIN通用输入信号19 YSTOP2Y停止信号2可做通用输入信号20 YINPOSY伺服到位信号可做通用输入信号21 YALARMY伺服报警信号可做通用输入信号22 YIN通用输入信号23 GND内部电源地线24 GND25 +12V内部+5V电源正端a脉冲/方向输出信号的连接脉冲输出为差动输出方式可与步进/伺服驱动器很方便的连接b编码器输入信号的连接以上以使用+5V电源的编码器为例+5V电源可使用内部电源也可外接5V电源c数字输入的连接d数字输出的连接e. PWM输出的连接PWM输出的方式与J2的跳线有关当J2连接1-2时为0-5V电平输出PWMOUT+输出0-5V电压PWMOUT-连接至内部地线当J2连接2-3时光耦隔离输出PWNOUT+为光耦正端PWMOUT-为光耦负端因光耦输出为无源输出而且电流较小可能需要增加放大电路J3为输出电平转换一般接在1-2f. D/A输出的连接D/A输出为无隔离在DAOUT与GND输出0-10V电压第四章软件安装ADT853卡在WINDOWS95/98/NT/2000下必须安装驱动程序才能使用在DOS下则无须安装驱动程序WIN95/98下驱动程序的安装以下用Windows98中文版为例说明驱动程序的安装在将ADT853卡安装到电脑上的PCI插槽后电脑开机后应发现新硬件出现如下图的提示单击下一步后出现如下画面按上图所示选择再单击下一步出现如下画面以上假设E盘为光盘按上图输入路径或者使用浏览寻找ADT850.INF 文件所在的路径单击下一步后应出现如下画面单击下一步后出现如下画面单击完成后即完成ADT853卡的安装Winnt下驱动程序的安装Win2000下驱动程序的安装以下用Windows2000 Professional 中文版为例说明驱动程序的安装其余版本的 Windows2000与此类似在将ADT853卡安装到电脑上的PCI插槽后开机时应以管理员身份登陆电脑开机后应发现新硬件出现如下图的提示然后出现如下画面单击下一步后再显示如下画面按上图选择后再单击下一步后出现如下画面再按上图选择指定一个位置单击下一步出现如下画面以上假设E盘为光盘或者使用浏览寻找ADT850.INF文件所在的路径单击确定后应出现如下画面单击”下一步”后出现如下画面单击完成后即完成ADT853卡的安装第五章功能说明一定量驱动定量驱动的意思是以固定速度或加/减速度输出指定数量的脉冲需要移动到确定的位置或进行确定的动作时使用此功能加/减速的定量驱动如下图所示输出脉冲的剩余数比加速累计的脉冲数少时就开始减速输出指定的脉冲数后驱动也结束进行加/减速的定量驱动需要设定下列参数a) 范围Rb) 加/减速A/Dc) 初始速度SVd) 驱动速度Ve) 输出脉冲数 P加/减速定量驱动是一般如上图所示从计算的减速点开始自动减速此外也可以用手动减速在下列的情况下不能正确地计算自动减速点或无法算出此减速点所以需要手动地计算减速点直线加/减速定量驱动中需要经常变更速度用加/减速运行圆弧插补连续插补需要改为手动减速模式设定减速点二连续驱动在连续驱动中连续输出驱动脉冲直至高位的停止命令或外部的停止信号有效需要运行原点搜寻扫描操作控制马达旋转速度时使用此功能有两种停止命令一个是减速停止另一个是立即停止每个轴都有用于减速/立即停止的STOPO STOP1STOP2的3点外部信号每个信号都可以设定有效/无效电平STOPO STOP1STOP2信号在加/减速驱动中为减速停止在定速驱动中为立即停止连续驱动的原点搜寻动作把原点接近信号原点信号编码器Z相信号等安排在STOPO STOP1 STOP2在各轴上设定各信号的有效/无效和逻辑电平高速搜寻时用加/减速连续驱动当设定的有效信号处于激活电平时就减速停止低速搜寻时用定速连续驱动当设定的有效信号处于激活电平时就立即停止为了以加/减速连续驱动除了输出脉冲数以外都要设定和定量驱动一样的参数三速度曲线1. 定速驱动定速驱动就是以一成不变的速度输出驱动脉冲如果设定驱动速度小于初始速度就没有加/减速驱动而是定速驱动使用搜寻原点编码器Z相等信号时找到信号后马上要立即停止的话不必进行加/减速驱动而是一开始就运行低速的定速驱动为了定速驱动下列参数应相应预先设定范围R初始速度SV驱动速度V2. 直线加/速减速驱动直线加/减速驱动是线性地从驱动开始的初始速度加速到指定的驱动速度定量驱动时加速的计数器记录加速所累计的脉冲数当剩余输出脉冲数少于加速脉冲后就开始减速自动减速减速时将用指定的减速度线性地减速至初始速度为了直线加/减速驱动下列参数需预先设定范围R加速度A 加速度和减速度减速度D 加/减速度个别设定时的减速度( 必要时)初始速度SV驱动速度V定量驱动的三角防止在直线加减速的定量驱动中如果输出脉冲数小于要求的数时会产生如上图的三角波形此时三角防止功能会启动三角防止功能是在直线加减速的定量驱动中哪怕输出脉冲数小于要求的数也防止三角波形在加速中加速时和减速时消费的脉冲数大于总输出脉冲数的1/2 后停止加速保持在定速域因此哪怕输出脉冲小于输出脉冲数的1/2也在定速域1非对称直线加/减速驱动往垂直方向移动对象物时对对象物有重力加速度的负担所以在这样加速度和减速度不同的非对称直线加减速的定量驱动中最好变更上下移动的加速度和减速度此时可以运行自动减速事先不用设定手动减速点图1是加速度比减速度大的例子图2是减速度比加速度大的例子另外跟通常的直线加减速驱动一样需要设定下述的参数范围R加速度A减速度D初始速度SV驱动速度V2S 曲线加/速驱动驱动速度加/减速时可线性地增加/减少加速度/减速度以产生S型速度曲线S曲线加/减速驱动如下图所示运行驱动开始加速时加速度以指定的加速度的增加率(K) 从0线性增加至指定的数值(A)因此这个速度曲线成为二次级抛物线(a 区间)加速度达到指定数值(A)后保持此数值这时速度曲线是直线型的速度在加速中b区间目标速度V和当前速度的差值比相应时间增加所增加的速度少时加速度趋向0减少率和增加率一样指定的减速度的减少率K线性地减少这时速度曲线成为二次抛物线C区间本书定义这种具有部分固定加速度的加速为部分S曲线加速另一方面在a区间若在加速度达到指定数值A前目标速度V和当前速度的差值比相应时间增加所增加的速度少时b区间就消失只有a和c 区间这种没有固定加速度的加速称为完全S曲线加速要执行S曲线加/减速用户必须设定加速方式为S曲线加速然后设定下列参数范围R加速度/减速度的变化率K加速度 A减速度D必要时初始速度SV驱动速度V运行S 曲线加/减速驱动时的注意点运行S曲线加/减速定量驱动时驱动中不能变更驱动速度运行S曲线加/减速时不能驱动圆弧插补连续插补四位置管理1逻辑位置计数器和实位计数器逻辑位置计数器是计数ADT853卡中的正/负方向输出脉冲输出一个正向脉冲时向上计1输出一个负方向脉冲时向下计1实位计数器计数来自外部编码器的输入脉冲可以用命令选择输入脉冲的类型为A/B相信号或者独立2脉冲向上/下计数信号计数方向可设定可以在任何时候写入或读出2个计数器的数据计数范围在-2,147,483,648~+2,147,483,647之间2比较寄存器和软件限位每轴有2个32位寄存器COMP+ COMP-能与逻辑位置计数器和实位计数器比较大小把2个比较寄存器的比较对象定为逻辑计数器还是实位计数器可以设定COMP+寄存器主要用来检测逻辑/实位计数器某个范围的上限COMP-寄存器主要用来检测逻辑/实位计数器某个范围的下限软件限位设为有效后在驱动中如果逻辑/实位计数器的值大于COMP+的值就执行减速停止此后只能执行负方向驱动命令至逻辑/实位计数器的值小于COMP+的值同样如果逻辑/实位计数器的值小于COMP-的值就执行减速停止此后只能执行正方向驱动命令至逻辑/实位计数器的值大于COMP-的值可以在任何时候写COMP+寄存器和COMP-寄存器3位置计数器的可变环形逻辑位置计数器及实位数器是32位长的上/下环形计数器因此从32位长的最大数值FFFFFFFFh往+方向计数的话最后计数计到0从0往-方向计数的话最后计数计到FFFFFFFFh可变环功能是可以把这个环形计数器的最大数值任选设定如果定位不是直线而是旋转运动的话用此功能控制位置很方便使可变环功能有效后COMP+寄存器设定逻辑位置计数器的最大数值在COMP-寄存器设定实位计数器的最大数值如在X轴为旋转轴时假设X轴为10000个脉冲旋转一圈设定可变环功能有效在COMP+寄存器设定9999同时使用实位计数器的话在COMP-寄存器设定9,999这时计数动作往+方向向上计数时… 9998 9999 0 1 …往-方向向下计数时… 1 0 9999 9998 …这样就不需要考虑计数值超过10000时的计算问题计数范围一定在0-9999之间注意每个轴都要设定可变环功能的有效/无效但是不能分别设定逻辑位置计数器和实位计数器的有效/无效使可变环功能有效后不能使用软件限制功能五插补ADT853卡可以进行2-4轴的直线插补2轴圆弧插补在插补驱动过程中插补运算是在指定X轴的基本脉冲时序下运行的因此进行插补命令之前先要设定指定X轴的初始速度驱动速度等参数Z-W 插补时是以Z轴速度为基准插补时的越限错误插补驱动时每个驱动轴都能进行硬件限制和软件限制在插补驱动中任何轴的限制有动作插补驱动就停止注意运行圆弧插补时任何方向+方向/-方向的硬件限制软件限制有效插补都会停止因此使用圆弧插补要非常小心不能脱离限制区域 伺服马达的到位信号在插补驱动中各轴到位信号INPOS一旦有效插补驱动就结束结束后所有轴的INPOS信号处于有效电平12轴直线插补设定相对于当前位置的终点坐标后就开始进行线性插补直线插补的坐标范围是带符号的24位字长插补范围为从各轴当前位置到-8,388,607~+8,388,607之间如上图所示对指定直线的位置精确度在整个插补范围内有0.5LSB上图还有直线插补的驱动脉冲输出例子在设定的终点数值中绝对值最大的轴是长轴在插补驱动中此轴一直输出脉冲其它的轴是短轴根据直线插补算术的结果有时输出脉冲有时不输出脉冲2圆弧插补设定相对当前位置始点的圆弧中心坐标及终点坐标后执行圆弧插补CW圆弧插补从当前坐标至终点坐标以顺时针方向绕中心坐标画圆弧CCW圆弧插补以逆时针方向绕中心坐标画圆弧如果终点设为00能画整个圆至于圆弧插补的算法如下图所示由X轴和Y轴定义一个平面绕中心坐标把它分为0~7的8个象限如图所示在0象限的插补坐标X Y上Y绝对值一直比X的绝对值小绝对值小的轴为短轴1256象限是X轴0347象限是Y轴短轴在这些象限之间一直输出驱动脉冲长轴根据圆弧插补运算结果有时输出脉冲有时不输出脉冲下面是输出一个整圆的例子以及输出脉冲的示例终点判断对于圆弧插补在插补驱动开始前把当前坐标设为00根据中心坐标的数值决定半径画圆圆弧算法的误差在插补驱动范围内有1个脉冲因此指定的终点可能不在圆的轨迹上圆弧插补进入终点所在的象限时只要结束点值与终点的短轴数值一致圆弧插补就结束3连续插补对于没有连续插补功能的控制卡如果需要在上一插补点结束后继续下一插补只能不断查询上一插补是否完成然后输出下一插补的数据如果上位机的速度较慢或者上位机运行多任务操作系统在两次插补之间就会出现停顿会影响插补的效果而且插补速度很难提高而ADT853卡带有连续插补功能可以很好的解决这一问题它可在上一插补未结束时输出下一插补的数据即使在很慢的电脑上也可达到好的效果连续插补是直线圆弧插补直线插补…这样在每个插补节点之间不停地驱动连续插补在连续插补驱动中先读取连续插补的允许写入状态和插补驱动状态如果插补未结束并且允许写入即可写入下一插补命令因此在所有的插补节点中从连续插补驱动开始至结束的时间必须长于设定下一个插补节点的数据和发命令的时间连续插补中发生的错误在连续插补驱动过程中若发生越限等错误驱动就立即在当前插补节点上停止在停止的插补节点上下一节点的数据和命令虽在但命令是无效的此外在发插补命令前必须检查错误若没有检查当发生错误停止驱动后这些数据和命令将无效而从下面第2个插补节点开始运行一定要进行检查若发现错误的话要脱离连续插补的循环连续插补中有圆弧插补时圆弧插补终点的短轴数值也许会比真值偏差1个脉冲因此为了避免累积每个节点的误差事先要确认每个圆弧插补的终点然后考虑怎么运行连续插补4加/减速驱动的插补插补一般用定速驱动不过ADT853卡可以用直线加/减速驱动或S 曲线加/减速驱动只可做直线插补运行插补在连续插补时为了实现加/减速驱动可以使用减速有效命令和减速无效命令在插补驱动时减速有效命令是使自动减速或手动减速变为有效减速无效命令是使它变为无效复位时都是无效状态用加/减速单独运行插补驱动时驱动开始之前一定要设定成减速有效状态在驱动中写入减速有效命令也不能变为有效直线插补的加/减速驱动在直线插补中可以运行直线加/减速驱动及S曲线加减速驱动减速圆弧插补的加/减速驱动在圆弧插补位模式插补中只能用手动减速的直线加/ 减速驱动不能使用S 曲线加/减速驱动及自动减速连续插补的加/减速驱动在连续插补中只能用手动减速的直线加/减速驱动不能用S曲线加/减速驱动及自动减速在连续插补中要事先设定手动减速点这个手动减速点设定在运行减速的最终节点上并设定从X轴输出的基本脉冲的数值连续插补时先把减速设定为无效然后开始插补驱动在要减速的最终插补节点上写入插补命令之前写入允许减速命令开始最终插补节点的驱动时减速就有效从最终插补节点的开始计算主轴输出的基本脉冲数大于手动减速点的数值时减速就开始比如从插补节点1至5的连续插补中在最终节点5上用手动减速的话有下述的程序对主轴设定加/减速模式和参数写手动减速点写无效减速命令节点1插补命令检查错误等待写入下一个数据节点2插补命令检查错误等待写入下一个数据写允许减速命令节点5插补命令由从节点5 开始的X轴基本脉冲数的数值来设定手动减速点比如假定减速化费2,000 脉冲在节点5上输出的基本脉冲的总脉冲数是5,000 的话手动减速点就设定为5,000-2,000=3,000开始至停止一定要在1个节点内运行减速减速停止的最终插补节点需要从其X或Z轴输出的基本脉冲总数要大于在减速中化费的脉冲数六脉冲输出方式驱动输出脉冲有下图所示的2种脉冲输出方式以独立2脉冲方式正方向驱动时由PU/CW 输出驱动脉冲负方向驱动时由DR/CCW输出驱动脉冲采用1脉冲方式则由PU/CW输出驱动脉冲由DR/CCW输出方向信号七硬件限制信号硬件限制信号LMT+LMT-是限定正方向和负方向驱动脉冲的输入信号当限制信号的逻辑电平和限制信号有效时可以由命令选择减速停止或立即停止八伺服马达对应的信号与伺服马达驱动器连接的输入信号有到位信号INPOS和警报信号ALARM每个信号的有效/无效及逻辑电平都可以设定INPOS 输入信号与伺服马达定位完毕信号对应设定模式为有效时一个驱动结束后等待INPOS 输入信号有效驱动状态返回结束ALARM 输入信号接受从伺服马达驱动器的警报信号设定为有效时一直监视ALARM 输入信号若信号有效在驱动中立即停止驱动这些用于伺服马达驱动器的输入信号可以用通用I/O函数读其状态通用输出信号可用于偏置计数器清除警报复位伺服开启等第六章 ADT853库函数列表一基本参数设置类int adt853_initial(void);int adt853_end(void);int set_stop0_mode(int cardno, int axis, int value,int logic);int set_stop1_mode(int cardno, int axis, int value,int logic);int set_stop2_mode(int cardno, int axis, int value,int logic);int set_actualcount_mode(int cardno, int axis, int value,int dir,int freq);int set_pulse_mode(int cardno, int axis, int value,int logic,int dir_logic);int set_limit_mode(int cardno, int axis, int value,int logic);int set_softlimit_mode1(int cardno, int axis, int value);int set_softlimit_mode2(int cardno, int axis, int value);int set_softlimit_mode3(int cardno, int axis, int value);int set_inpos_mode(int cardno, int axis, int value,int logic);int set_alarm_mode(int cardno, int axis, int value,int logic);int set_ad_mode(int cardno, int axis, int value);int set_dec1_mode(int cardno, int axis, int value);int set_dec2_mode(int cardno, int axis, int value);int set_circle_mode(int cardno, int axis, int value);int set_input_filter(int cardno,int axis,int number,int value);二驱动状态检查类int get_status(int cardno,int axis,int *value)int get_stopdata(int cardno,int axis,int *value)int get_inp_status(int card,int no,int *value)int get_inp_status2(int card,int no,int *value)三运动参数设定类int set_range(int cardno,int axis,long value);int set_acac(int cardno,int axis,long value);int set_acc(int cardno,int axis,long value);int set_dec(int cardno,int axis,long value);int set_startv(int cardno,int axis,long value);。