基于STM32单片机的运动员折返跑测试系统的研究与实现
基于stm32与加速度传感器的动位移无线测量方法

基于stm32与加速度传感器的动位移无线测量方法摘要:为了满足结构动位移测量要求,设计一套基于STM32 的嵌入式动位移无线测量系统。
该系统以STM32L151C8T6芯片为核心控制器,结合电容式MEMS加速度传感器ADXL355。
使用频域积分方法,在实验室和某人行桥上进行了实验。
实验室中通过改变采样频率进行测量,结果表明该系统应用于结构动位移测量时精度随着采样频率的增大而增大。
某人行桥上的动位移实验效果较好,可见使用该方法进行结构动位移测量是完全可行的。
关键词:动位移;无线测量;嵌入式编程;加速度传感器;频域积分中图法分类号U442;文献标志码B对桥梁结构而言,动位移是一个非常重要的数据,是评定桥梁结构承载能力、汽车行驶安全性的一项重要指标[1]。
从动位移的数值分析中可以直接反映桥梁结构的竖向整体刚度和结构内力分布状态。
从而对桥梁的薄弱部位进行判断以及检查结构的整体性。
在桥梁鉴定、危桥改造和新桥验收等方面都需要准确测量桥梁的静、动位移值[2]。
桥梁结构动位移的测量方法有接线式电阻(感、容)位移计、激光挠度测试仪、惯性式位移测试仪等[3],前两种测量方法要求有一个固定不动的参考点以便进行测量,但是对于很多桥梁,由于受使用条件和环境的限制,这些测试方法往往耗时长,效率较低。
一般情况下,测试桥梁结构的加速度信号比较方便。
用加速度计测量桥梁的加速度,再通过两次积分,求得桥梁挠度的加速度测量方法,目前已得到众多研究者的关注。
对于采集到的加速度信号,要得到位移,目前主要有两种方法,第一种方法是通过硬件积分[4],第二种方法是软件积分。
硬件积分通过积分电路实现各参量之间的转换,但是电子元器件的性能参数具有较大的离散性,若匹配不好,容易在积分后产生畸变。
近年来随着计算机技术的发展,人们更倾向于研究软件积分方法。
软件积分目前主要有两种方法:时域积分和频率积分。
其中时域积分是直接对加速度信号进行二次积分,从而得到位移信号,这种方法形式直观。
基于激光扫描的全自动往返跑训练考核装置的设计

基于激光扫描的全自动往返跑训练考核装置的设计
邵锋;姚文韬;王玉萍;沈宏
【期刊名称】《河南科技学院学报:自然科学版》
【年(卷),期】2012(040)005
【摘要】针对当前的体育训练、比赛中进行往返跑考核存在的教练或者裁判人员观测误差大、误判、劳动强度大和效率低等现状,系统设计以ATMEL89S51系列单片机为核心控制器,采用激光器精确扫描运动员的踏线信息,采用无线传输模块进行起点和折返点之间的实时无线通信,实现了对往返跑训练考核过程的精确检测和智能控制,减轻了工作人员的劳动强度,提高了工作质量和效率.
【总页数】5页(P66-69,74)
【作者】邵锋;姚文韬;王玉萍;沈宏
【作者单位】
【正文语种】中文
【中图分类】TP274
【相关文献】
1.巧用橡皮筋辅助4×10米往返跑训练 [J], 殷孝强
2.考核课不放松--以50米X8往返跑考核课教学设计为例 [J], 王明亮
3.基于激光扫描的全自动往返跑训练考核装置的设计 [J], 邵锋;姚文韬;王玉萍;沈宏
4.蛇形往返跑训练 [J], 陈宇华;洪志斌
5.50米×2蛇形往返跑技术分析及其教学训练法 [J], 金之昌
因版权原因,仅展示原文概要,查看原文内容请购买。
基于STM32的机器人运动精确控制系统设计
基于STM32的机器人运动精确控制系统设计作者:谢邵春陈杨彭友玉张雯丽郑辰雅来源:《科技创新与应用》2018年第16期摘要:针对机器人运动控制不精确,如实际转向与控制转向有偏差,导致调整麻烦,通常需要传感器(如使用光电编码器)进行反馈控制。
若轮子直径不一样,会造成控制量上的累积误差。
为了解决该问题,设计了一个基于STM32微控制器的机器人运动精确控制系统,对由于直径不同导致的误差进行标定补偿,实现机器人行走,尤其是转向时角度的精确控制。
该设计,以PID为基本控制算法,STM32F4单片机为控制核心,使用其通用定时器的输入捕获功能来采集光电编码器的输出,进而产生受PID算法控制的PWM脉冲,对直流电机的转速进行控制,实现机器人精度高的运动性能控制。
关键词:STM32;PID控制;运动精确控制;PWM中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2018)16-0035-03Abstract: In view of the imprecise motion control of the robot, such as the deviation between the actual steering and the control steering, which leads to the adjustment trouble, it usually needs the sensor (such as using photoelectric encoder) to carry on the feedback control. If the wheel diameter is different, it will cause the cumulative error on the control quantity. In order to solve this problem, a precise control system of robot motion based on STM32 microcontroller is designed. The error caused by different diameters is calibrated and compensated to realize the precise control of the robot's walking angle, especially when it is steering. This design takes PID as the basic control algorithm and STM32F4 single chip microcomputer as the control core, uses the input and capture function of its universal timer to collect the output of the photoelectric encoder, and then produces the PWM pulse controlled by the PID algorithm. The speed of DC motor is controlled to realize the motion performance control of robot with high precision.Keywords: STM32; PID control; precise motion control; PWM引言直流电动机应用于实际多个领域内,因为它具有较好的调速性能、启动转矩大、控制性能优等特点[1-2]。
基于STM32的无线调节起跑器控制系统

基于STM32的无线调节起跑器控制系统林凯;王宇杰;章健【摘要】文章主要介绍了一种基于STM32可无线调节起跑器的控制系统,该系统以STM32为核心器件,赛前采集不同运动员对起跑器使用习惯的数据,通过PC机将信息利用nRF905无线模块传递给起跑器上的单片机,由单片机控制调节起跑器的角度、位置.实现了缩短运动员在赛场手动调节起跑器的时间,有利于运动员提高比赛成绩,同时加快了比赛进程,增加了比赛的观赏性.【期刊名称】《数字技术与应用》【年(卷),期】2016(000)006【总页数】2页(P3-4)【关键词】STM32;无线调节控制系统【作者】林凯;王宇杰;章健【作者单位】郑州大学电气工程学院河南郑州 450001;郑州大学电气工程学院河南郑州 450001;郑州大学电气工程学院河南郑州 450001【正文语种】中文【中图分类】TN919在短跑竞赛中,起跑器是常见的体育器材,它能帮助运动员提高起跑速度,取得好成绩。
但是运动员在赛前需要不断手动调节适合自己起跑的起跑器位置。
如若没有调节好自己适应的起跑器位置便开始比赛,运动员很难取得自己理想的成绩。
本文设计了一种起跑器控制系统,可实现赛前无线调节起跑器位置、角度,缩短了运动员赛场上手动调节起跑器的时间,有利于运动员提高比赛成绩,同时加快了比赛进程,增加了比赛的观赏性。
系统由STM32单片机、起跑器、RS232电平转换电路、nRF905无线模块、S3003舵机、42系列步进电机、M542H电机驱动、直线滑台、PC机组成。
赛前采集运动员习惯使用起跑器的位置、角度等信息,存储在PC机的数据库中。
正式比赛前,使用PC机上位机界面将数据通过RS232串口传输给与PC机相连的STM32中,由无线模块nRF905成功接收到STM32传输的数据后发送,当装在起跑器上的无线模块nRF905成功接收后,将数据发送给起跑器上的STM32单片机进行处理,单片机将处理的数据转化为两部分,一是调节角度信号即PWM的占空比,实现抵足板角度的控制。
自动往返电动小汽车--基于stm32
自动往返电动小汽车本设计民用STM32作为自动往返小汽车的检测和控制核心,辅以传感器、控制电路、显示电路等外围器件,构成了一个车载控制系统。
路面黑线检测使用反射式红外传感器,利用PWM技术动态控制电动机的转速。
基于这些完备而可靠的硬件设计,使用了一套独特的软件算法,实现了小车在限速和压线过程中的精确控制。
电动小汽车能够根据题目要求在直线方向上完成调速、急刹车、停车、倒车返回等各种运动形式;这辆小车还可以自动记录、显示一次往返时间和行驶距离,并用蜂鸣器提示返回起点。
另外,我们经过MATLAB仿真后,成功地实现了从最高速降至低速的平稳调速。
本系统主要采用模糊控制算法进行速度调节。
通过模糊控制和PWM脉宽调制技术的结合,提高了对车位置控制精度,并且实现了恒速控制。
关键词:PWM,STM32F103,电机,传感器前言嵌入式技术依靠其体积小、成本低、功能强等特点,适应了智能化发展的最新要求。
单片机作为控制系统的微处理器,在数据处理和代码存储等方面都已经无法满足系统的要求,ARM微处理器资源丰富,具有良好的通用性。
Cortex-M3是ARM公司最新推出的第一款基于ARMv7体系的处理器内核。
它主要针对MCU领域,在存储系统、中断系统、调试接口等方面做了较大的改进,有别于过去的ARM7处理器;Cortex-M3具有高性能、低功耗、极低成本、稳定等诸多优点,非常适合汽车电子、工业控制系统、医疗器械、玩具等领域。
基于Cortex-M3内核的STM32系列处理器于2007年由ST公司率先推出,它集先进Cortex-M3内核结构、出众创新的外设、良好的功耗和低成本于一体,极大的满足自动控制系统设计要求。
作为先进的32位通用微控制器的领跑者,STM32以其出众的性能、丰富且灵活的外设、很高的性价比以及令人意外的功耗水准,使其自面世以来得到众多设计者的青睐,众多行业领导者纷纷选用STM32作为新一代产品的平台。
因此将STM32F103应用于智能小车的控制系统是一种较好的选择。
基于STM32单片机控制的智能运动监测仪
・ 7 9・
基于 S T M3 2 单 片机控制 的智能运动监测仪
王荣誉 江 哈 尔滨 1 5 0 0 4 0 )
摘
要: 利用 S T M3 2单 片机 、 G P S模 块 、 D S 1 8 B 2 0温度传感 器、 P u l s e s e n s o r 心率传感 器、 MP U 6 0 5 0传 感器、 蓝牙等设计 一款智能运动
解 决 上述 问题 。 2 系统 设计
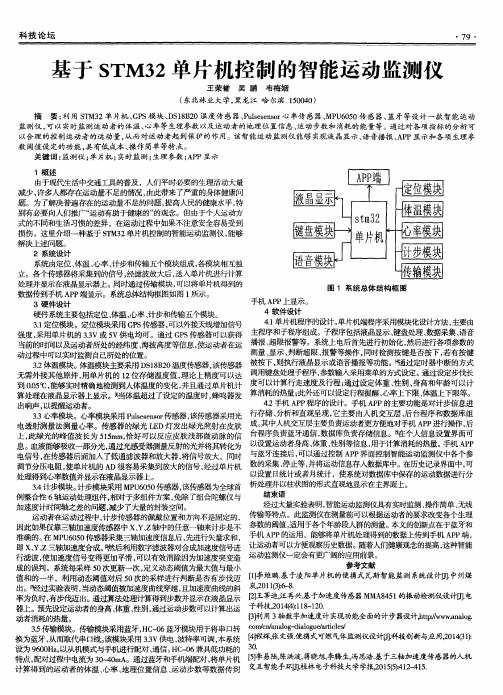
系统由定位 、 体温、 心率 、 计步和传输五个模块组成 , 各模块相互独 立 。各个传感器将采集到的信号 , 经滤波放大后 , 送入单片机进行计算 处理并显示在液晶显示器上。同时通过传输模块, 可以将单片机得到的 数据传到手机 AP P端显示。系统总体结构框图如图 1 所示。
3 硬件 设计
图 1 系统总体 结构框 图
手机 A P P上显 示 。
结束 语 例整合 陛6轴运动处理组件 , 相对于多组件方案 , 免除了组合陀螺仪与 经过大量实验表明, 智能运动监测仪具有实时监测 、 操作简单 、 无线 加速度计时间轴之差的问题 , 减少 了大量的封装空间。 运动者在运动过程中, 计步传感器的佩戴位置和方 向不是固定的, 传输等牦 。此监测仪在测量前可以根据运动者的要求改变各个生理 适用于各个年龄段人群的测量。 本文的创新点在于蓝牙和 因此如果仅靠三轴加速度传感器中 x、 Y 、 z轴中的任意一轴来计步是不 参数的阈值 , 手机 A P P的运用 ,能够将单片机处理得到的数据上传到手机 A P P端 , 准确的。 在M P U 6 0 5 0 传感器采集三轴加速度信息后 , 先进行矢量求和 , 让运动者可以方便观察历史数据。随着人们健康观念的提高 , 这种智能 即X 、 Y 、 Z 三轴加速度合成。 后利用数字滤波器对合成加速度信号进 行滤波 , 使加速度信号变得更加平滑 , 可以有效消除因为加速度突变造 运动监测仪一定会有更广阔的应用前景。 参考文献 成的误判。系统每采样 5 0次更新一次 , 定义动态阈值为最大值与最小 1 降 维鹏. 基于凌阳单片机的便携式瓦斯智能监测系 统设计叨 . 中州煤 值和的一半 ,利用动态 阈值对后 5 0次的采样进行判断是否有步伐迈 [  ̄ L 2 o I 1 ( 3 ) : 8 . ’ 出。婴 经过实验表明, 当动态阈值被加速度曲线穿越, 且加速度曲线的斜 2 1 王莘遵 汪再兴. 基于加速度传感器 MM A8 4 5 1 的振动检测仪设计田. 电 率为负时 , 有步伐迈出。通过算法处理计算得到步数并显示在液晶显示 [ 2 0 1 4 ( 4 ) : 1 1 8 — 1 2 0 . 器上 。 预先设定运动者的身高 、 体重 、 性别 , 通过运动步数可以计算出运 子科技’ [ 3 F4 用 3轴数字加速度计实现功能全面的计步器设计, h t t p J ' / w w w . a n a l o g . 动 者消耗 的热量 。
基于STM32单片机的心率计步体温显示系统设计
中文摘要科技在进步,时代在发展,科学的生物学信号指标与人们的生活健 康紧紧地联系在一起,只有更全面地了解其中规律,才能更科学地解决 人体健康问题和拥有高质量的生活。
随着科学技术的发展,便捷式生物 医学电子设备技术也愈来愈趋于成熟,人们的生活水平越来越高,对便 捷式生物医学信号电子实时监测显示设备的需求也越来越高。
健康指标 很多,本设计是根据人们行走的步数和心跳的频率两个重要的健康指标 进行开发设计,因此,本次毕业设计按照现在发展的需要设计一款基于 STM32 单片机的运动实时监测显示系统。
运动实时监测显示系统主要采 用 STM32F103C8T6 核心板电路,而计算人的走路步数,走过的路程距 离和行走的状态主要通过重力加速度传感器 ADXL345 来实现检测。
通 过心率传感器和温度传感器实时检测心跳频率和身体温度。
而实时显示 步数多少、距离长短、心率快慢以及温度高低则通过 LCD1602 来实现。
关键词:STM32F103 步数 ADXL345 模块 心率模块 温度AbstractScience and technology are progressing, the times are developing, and the biological signal indicators of science are closely related to the health of people's lives. Only by more comprehensive understanding of the rules, can we solve human health problems more scientifically and have a high quality of life. With the development of science and technology, convenient biomedical electronic equipment technology is becoming more and more mature, people's living standard is getting higher and higher, and the demand for convenient biomedical signal electronic real-time monitoring and display equipment is becoming higher and higher. There are many health indicators, this design is based on the number of people walking and the frequency of heartbeat two important health indicators to develop the design, therefore, this graduation project According to the need of development, a real-time motion monitoring and display system based on STM32 single chip microcomputer is designed. The real-time motion monitoring and display system mainly adopts the STM32F103C8T6 core board circuit, and calculates the number of walking steps, the distance and the state of walking mainly through the gravity acceleration sensor ADXL345 to realize the detection. real-time detection of heartbeat frequency and body temperature through heart rate sensors and temperature sensors. And the real-time displayof the number of steps, the length of distance, heart rate speed and temperature through the LCD1602 to achieve. Keywords : STM32F103 steps adxl345 module heart rate module temperature目录第一章 绪论 ..............................................................................................1 1.1 课题背景及研究意义 .......................................................................1 1.2 国内外研究现状 ...............................................................................2 1.3 本设计论文结构安排 .......................................................................2第二章 设计方案的选择 ..........................................................................3 2.1 STM32 单片机芯片选择 ..................................................................3 2.2 显示模块选择 ...................................................................................3 2.3 计步模块选择 ...................................................................................4 2.4 心率监测模块选择 ...........................................................................4第三章 硬件电路设计 ..............................................................................5 3.1 系统功能分析及系统结构设计 .......................................................5 3.1.1 系统功能分析 .............................................................................5 3.1.2 系统结构......................................................................................5 3.2 模块电路设计 ...................................................................................5 3.2.1 主控板电路 ................................................................................5 3.2.2 显示模块电路 ............................................................................7 3.2.3 计步模块电路 ............................................................................8 3.2.4 心率模块电路 ............................................................................9 3.2.5 温度模块电路 ..........................................................................12第四章 系统软件应用 ............................................................................14 4.1 系统编程语言选择 ........................................................................14 4.2 程序开发环境 ................................................................................14 4.3 软件开发流程 ................................................................................154.4 程序烧录软件介绍 ........................................................................16 4.5 程序烧写模块介绍 ........................................................................16 4.6 系统算法设计 ................................................................................184.6.1 心率算法设计 ..........................................................................18 4.6.2 计步与距离算法设计 ..............................................................18 4.6.3 体温算法设计 ..........................................................................18 4.7 系统编程流程 ................................................................................18 第五章 系统调试 ....................................................................................19 5.1 系统调试.........................................................................................19 5.1.1 程序调试...................................................................................19 5.1.2 硬件测试...................................................................................19 5.2 实物测量数据 ................................................................................20 5.3 实物测试.........................................................................................20 第六章 总结与展望 ................................................................................21 参考文献................................................................................................... 22 致谢 ........................................................................................................... 23第一章 绪论 1.1 课题背景及研究意义伴随着当今社会的不断发展,人们的生活水平不断的提高,实时监测人体健康 指标在预防突发疾病方面愈发重要,人们也通过各种各样的方式去保持自己的身体 健康。
基于STM32的智能循迹往返小车设计
基于STM32的智能循迹往返小车设计董杰;王国豹【期刊名称】《电子设计工程》【年(卷),期】2013(21)12【摘要】本设计针对智能交通系统,采用STM32F103作为主控芯片,辅以路面检测模块、显示模块等外围器件,构成了一个完整的车载控制系统,能够在直线方向上完成调速、急刹车、停车、倒车返回等各种运动形式,并且可以自动记录、显示一次往返时间和行驶距离,同时用蜂鸣器提示返回到了起点.另外,经过MATLAB仿真后,成功地实现了从最高速降至低速的平稳调速.%The design of vehicle control system which is aimed at Intelligent Transportation Systems usesSTM32F103 as main control chip,which supplements road detection module,display module and other peripheral devices.The electric car can complete various forms of speed regulation,brakes,parking,reversing the return in a straight direction.The car can also automatically records and displays the round-trip time and distance traveled,and the buzzer prompt when it returns to the starting point.Additionally,it can control speed from top speed down to low speed smooth successfully through MATLAB simulation.【总页数】3页(P158-160)【作者】董杰;王国豹【作者单位】山东省汽车电子技术重点实验室山东济南 250014;山东省汽车电子技术重点实验室山东济南 250014【正文语种】中文【中图分类】TN215【相关文献】1.基于STM32的智能循迹小车设计 [J], 于雷;支语睿;朱一凡2.基于STM32的智能小车自动循迹及倒车入库设计 [J], 朱伟枝;杨亚萍;戴金龙3.基于STM32智能小车自主循迹避障系统设计与功能实现 [J], 卢雪红;邵亚军4.基于STM32的智能小车循迹优化设计 [J], 曾尧5.基于STM32的智能小车循迹避障测距的设计 [J], 洪一民;钱庆丰;章志飞因版权原因,仅展示原文概要,查看原文内容请购买。
基于STM32单片机的心率计步体温显示系统设计
基于STM32单片机的心率计步体温显示系统设计设计背景:随着人们生活水平的提高,对健康的关注越来越多。
心率、步数和体温是人体健康状况的重要指标,因此设计一个基于STM32单片机的心率计步体温显示系统,可以实时监测这些指标并显示出来,对用户的健康状况进行评估,并能记录历史数据,以便分析和调整生活方式。
系统设计:1.硬件设计:(1)硬件主要包括STM32单片机、心率传感器、加速度传感器、温度传感器和OLED显示屏。
(2)STM32单片机作为主控芯片,通过串口连接各个传感器。
(3)心率传感器用于检测用户的心率,加速度传感器用于检测用户的步数,温度传感器用于检测用户的体温。
(4)OLED显示屏用于显示心率、步数和体温的实时数值。
2.软件设计:(1)软件主要包括数据采集、数据处理和数据显示三个模块。
(2)数据采集模块使用STM32单片机的GPIO口和串口功能,通过读取传感器的输出数据进行采集。
(3)数据处理模块使用算法对采集到的数据进行处理,包括心率的检测、步数的计算和体温的测量。
(4)数据显示模块使用OLED显示屏将处理后的数据显示出来,并可以通过按键进行切换和历史数据的查看。
系统功能:1.实时监测心率、步数和体温,显示实时数值。
2.记录历史数据,可以查看过去一段时间内的心率、步数和体温变化。
3.提供警报功能,当心率或体温超出安全范围时,系统会自动报警。
4.提供数据导出功能,可以将历史数据导出到电脑进行分析和保存。
5.提供远程监测功能,可以通过手机等终端对心率、步数和体温进行实时监测。
设计优势:1.硬件成本低廉,容易实现。
2.软件算法可靠准确,能够实时监测和控制用户的健康状况。
3.系统界面友好,操作简单方便。
应用前景:该系统可以广泛应用于医疗、健康管理、运动调控等领域,对群众的健康状况进行实时监测和控制,提高生活质量和健康水平。
同时,该系统还具有一定的市场前景,可以作为智能手环、智能手表等产品的配套产品,形成一个完整的健康监测系统。
折返跑测试系统及测试方法[发明专利]
专利名称:折返跑测试系统及测试方法
专利类型:发明专利
发明人:郭辉,刘韵婷,李文龙,陈自强,章海明,陈若愚,任华栋申请号:CN201810762417.X
申请日:20180712
公开号:CN108939510A
公开日:
20181207
专利内容由知识产权出版社提供
摘要:折返跑测试系统,该系统包括主机和多个从机;多个从机串联在一起连接,第一个从机连接主机,最后一个从机重新连接至主机。
本设备在计时精度、视觉提醒、声音提示等方面有了突破和较大优越性,在折返跑应用日益普遍的趋势下,智能折返跑测试仪器A对此体测项目的推动普及将发挥其应有的的积极作用,甚至在相关标准的制定层面亦会发挥必要指导性功能。
如今,在国家大力号召全民健身的大环境下,我们的产品将拥有广阔的市场前景。
申请人:沈阳工业大学
地址:110870 辽宁省沈阳市经济技术开发区沈辽西路111号
国籍:CN
代理机构:沈阳智龙专利事务所(普通合伙)
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract:In this paper,we elaborated on the design of the hardware and software of a shuttle run test system,as well as its technical principles and approaches. The system uses an STM 32 m icrocontroller for overall control,which enables it to ac— curately measure the shuttle run records of athletes and to show them on a recorder,thus avoiding human errors.The system can also send the data to a host computer for further analysis. K eyw ords:STM32,automated testing,W IFI,sensor
技 术原理和 实现方 法。该 系统采用 STM32微 处理器 完成 总体控 制 ,能准确 测试运 动 员的折 返跑 成绩 ,并醒 目地 显
示在跑步记 录器上 ,不但能避免人 工测试带来的人 为操作 误 差 ,还 能把 成 绩数据 通过无 线传输发 送给 PC上位机 ,
以供 进 一 步 统 计 分 析 。
. -4>· .-4%·。= .夺 ·-4>-.孛 · . ·夺 .夺 · .夺 ·-4>.夺 ·-4>.-4>·夺 ·÷ ·夺 ·夺 ·夺 ·孛 - ·4-·夺 ·孛 --4-·夺 ·夺 ·夺 ·毒 ·夺 ·夺 ·夺 ·夺 ·夺 · ·夺 ·. ·夺 · · · -夺 ·
参 考 文 献 刘佰 强 ,赵 敏 .断 路 器 在 线 监 测 与 故 障 诊 断 系统 的 研 制[J].科技 创新与应 用,2013(29):10—12. 蔡 博南 ,刘庆珍 .基 于振动信 号的 断路 器机 械 故障 智 能诊 断综述 [J].机 电技 术 ,2014(4):157—160. 国 家技 术 监 督 局 .地 铁 直 流 牵 引 供 电 系统 :GB10411— 89[s].北京 :中国建 筑工业 出版社 ,2004. 郑泽鑫 ,郑 炼鑫.深圳 地铁 列 车空 调微 型 断路 器跳 闸 故障分析及整改措施 [J].电力机 车与城轨 车辆 ,2014 (1):78—80. 张 智 亮 .地 铁 变 电所 和 列 车 高速 断 路 器 跳 闸 匹配 性 分
随着 篮球 运动 的 发展 ,电 子 测试 系统 也 进 入 了 运 动员是 否 跑到位 以及 手 按 秒 表 的 反应 时 间 等 等 , 篮球运动员的世界 以辅助他们完成 日常的训练和综 都会导致很大的误差¨I2 J。笔者研制 的折返跑 电子 合考评。折返跑是篮球 运动 员主要训 练的项 目之 测试系统运用光电传感技术能准确测试运动员在规 一 ,折 返 跑训 练是 在 场地 内摆 好 两个标 志 物 ,两标 志 定 时 间 内折 返 的次数 ,以及 完成 折返 跑所 用 的时 间。 物之 问 的距 离为 15 m,运 动 员从 一 个 标 志物 跑 到 另 测 试 的结 果 能 醒 目地 显 示 在跑 步 记 录器 上 ,同时该 一 个标志物 ,然后再调头跑回来 ,如此往复。传统的 系统还具备 WIFI无线传输功能 ,将测试数据发送给 测试 方法 大 多是 人 用 秒 表 计 时 ,由于 无 法 准 确 判 断 Pc上位机保存 起来 ,方便 测试数据 的统计和分析 。
自A u动toc控 ontr制ol I _ 2016. ̄第。 4期’
r}
1
1j
基于 STM32单片机的运动员折返跑测试系统的研究与实现
余先涛 ,叶世伟 ,李 旋 ,李 洋 ,孑L文胜
(武 汉理 工 大学 机 电工程 学 院 ,湖 北 武汉 430070)
摘 要 :从 测试 系统的主要功 能要 求 出发阐述 了运动 员折返 跑 电子 测试 系统软 、硬件 的设计 思想 ,以及 其 中的 主要
测量柱 、两个跑步传感器充 电器 、WIFI模块和 Pc上 位机组 成 。系统设 计框 图如 图 1所 示 。
作者简介 :赵胜豪(1978一),男,河南人 ,本科 ,工程 师,从 事 地铁 供 电设 备 的运 行 维 护 和 管 理 工作 。
收 稿 日期 :2016—01—26
· 79 -
观 弋 ’ I M ode 捌rn胁 Ma c hin唧
1 系统 总 体 方 案 设计 该 测试 系统 是 由跑 步 记 录 器 、两 个跑 步传 感 器
析 [J].科 技 风 ,2014(10):64—65. [6] 北 京 市规 划 委 员 会 .GB50157—2013地 铁 设 计 规 范
[S].北京 :中国建筑工业 出版社 ,2014. [7] 中华人 民共和 国住房和城 乡建设部 .电力装置 的继 电
保 护和 自动装置设 计规 范 :GB/T50062—2008[s].北 京 :中 国计 划 出版社 ,2009. [8] 杨万帆 ,杨朝锋 .关于 断路 器分合 闸非 正常动 作 的案 例 分析 [J].科技 与企业 ,2012(24):267—26 感 器
中图分类号 :TP216
文献标识码 :A
文章编号 :1002—6886(2016)04—0079—04
Developm ent of a shuttle run test system based on STM 32 microcontroller YU Xiantao,YE Shiwei,LI Xuan,LI Yang,KONG W ensheng