第三章 变分法基础 翟立强资料
一阶变分 变分法PPT课件
y B(x1,y1)
A(x0 , y0)
o C
y
x D
其中常数c1,c2, r 可由条件
图1.2 曲边梯形的面积
y(x0) y0,
y(x1) y1,及
x1 x0
1[y(x)]2dx l
来确定。
2
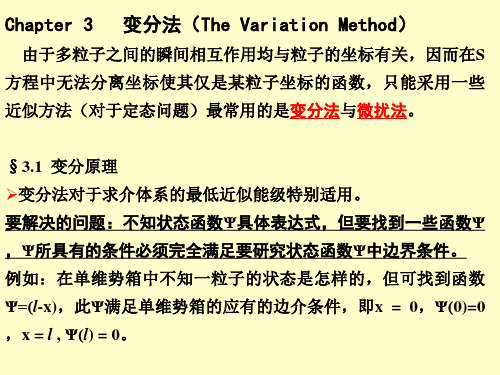
引例3:由最小势能原理,变形全能随所选取的三个位移函
数ui(i=1,2,3)而变,[u]也是一个泛函。而ui必须满足的体积不变
1.变分法
1.1 泛函与变分定义
1.1.1 泛函的概念
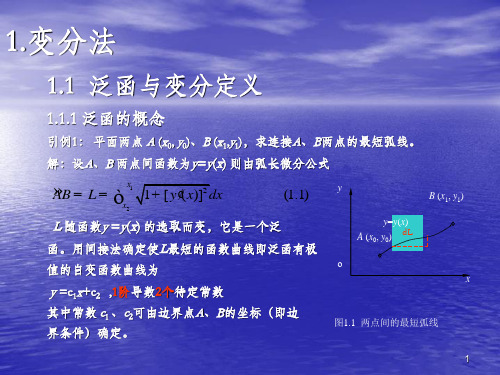
引例1: 平面两点 A (x0, y0)、B (x1,y1),求连接A、B两点的最短弧线。
解:设A、B 两点间函数为y=y(x) 则由弧长微分公式
ò »AB = L = x1 1+ [ y¢(x)]2 dx x2
(1.1)
L 随函数y =y(x) 的选取而变,它是一个泛
一阶变分变分法1100xxxxfxyydxfxyydx??????????101010101210u02xxxxxxxxuyyfxyyyydxfxyyyyyfxyyyyydxuuyyfxyyyfxyyydxyyffyydxyy???????????????????????????????????????????????????????????????????????????????????????????????????19??一阶变分变分法1200?????????dydydydyyydxdx?????????????????或200?????????y2变分号可由积分号外进入积分号内y121运算规则122泛函极值的条件泛函极值条件与函数极值条件具有相似的定义
y 0, y 0, y 0L , y(n) 0
01变分原理

举例4: 位能驻值原理就是一个变分命题。
当结构处于平衡状态下时,结构总势能达到最小值
该问题即求解最速降线问题——求出的曲 线就是最速降线。
结构势能= 应变能-力函数
Π=V-U 结构势能就是位移函数的泛函,Π[δ]
4
2014-11-30
1.2变分的特性 1. 函数定义与泛函定义的比较 函数y=y (x) X 自变量 对于变化域中x 都有函数值相对 应 泛函Π[ y(x)] y(x)自变函数 对于某一类函数y域 中的函数,都有Π与 之对应。 称因变量Π是函数 Y的泛函。
K阶接近
依次类推,k阶接近要求零阶至第k阶导数 之差的模都很小。
5
2014-11-30
Y
一阶接近的两条曲线 P2 Y=Y(X)
3. 函数的微分与泛函的变分 函数的微分定义 函数增量: y y x x y( x ) 可以展开为线性项和非线性项
y A( x)x o(x)
2014-11-30
船舶计算结构力学
理论力学 材料力学 结构力学
求解内力分布
q I l 1 2 4I 4l I l 4
A
3
A
① 计算基本图形 ② 基本未知量 ③基本方程
自升式平台
对工程结构进行精确的受力分析是及其困 难的,在现有技术条件下,通常是不可能 也是不必要的。 目前的结构分析工作旨在以合理的经济代 价保障结构体在正确的施工和使用过程中 的安全性,因而它应该是准确的。
一阶变分:
x2
Π = F ( x , y , y', y")dx
结构动力分析有限元法; 弹性结构稳定性分析有限元法; 非线性问题有限元法; 薄壁杆件结构有限元法; 有限元计算的前后处理、并行算法。
变分基本知识及变分法
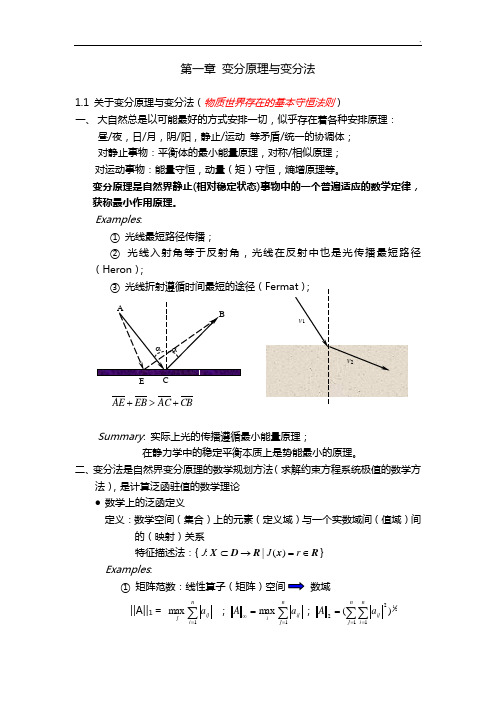
第一章 变分原理与变分法1.1 关于变分原理与变分法(物质世界存在的基本守恒法则)一、 大自然总是以可能最好的方式安排一切,似乎存在着各种安排原理:昼/夜,日/月,阴/阳,静止/运动 等矛盾/统一的协调体; 对静止事物:平衡体的最小能量原理,对称/相似原理;对运动事物:能量守恒,动量(矩)守恒,熵增原理等。
变分原理是自然界静止(相对稳定状态)事物中的一个普遍适应的数学定律,获称最小作用原理。
Examples :① 光线最短路径传播;② 光线入射角等于反射角,光线在反射中也是光传播最短路径(Heron );③CB AC EB AE +>+Summary : 实际上光的传播遵循最小能量原理;在静力学中的稳定平衡本质上是势能最小的原理。
二、变分法是自然界变分原理的数学规划方法(求解约束方程系统极值的数学方法),是计算泛函驻值的数学理论数学上的泛函定义定义:数学空间(集合)上的元素(定义域)与一个实数域间(值域)间的(映射)关系特征描述法:{ J :R x R D X ∈=→⊂r J )(|}Examples :① 矩阵范数:线性算子(矩阵)空间 数域‖A ‖1 = ∑=ni ij ja 1max ;∑=∞=nj ij ia A 1max;21)(1122∑∑===n j ni ij a A② 函数的积分: 函数空间数域 D ⊂=⎰n ba n f dxx f J )(Note : 泛函的自变量是集合中的元素(定义域);值域是实数域。
Discussion :① 判定下列那些是泛函:)(max x f f b x a <<=;x y x f ∂∂),(; 3x+5y=2; ⎰+∞∞-=-)()()(00x f dx x f x x δ ② 试举另一泛函例子。
物理问题中的泛函举例① 弹性地基梁的系统势能i. 梁的弯曲应变能: ⎰=∏l b dx dxw d EJ 0222)(21ii. 弹性地基贮存的能量: dx kw l f ⎰=∏0221 iii. 外力位能: ⎰-=∏l l qwdx 0iv. 系统总的势能:000;})({221222021===-+=∏⎰dxdww x dx qw kw dxw d EJ l泛函的提法:有一种梁的挠度函数(与载荷无关),就会有一个对应的系统势能。
课件_ch01变分法简介_v1

第三个变分问题:等周问题
在满足 x (s 0 ) = x (s1 ), y(s 0 ) = y(s1 ) 和条件
L(x (s ), y(s )) =
ò
s2
s1
ædx (s )ö ædy(s )ö ÷ ÷ ç ÷ ÷ 1+ç + ds = constant (a) ç ç ÷ ÷ ç ç ÷ ÷ ds ds è ø è ø
注 1:有两个可以选取的函数 x = x (s ), y = y(s ) 注 2:也是边界已定的变分, x (s 0 ) = x (s1 ), y(s 0 ) = y(s1 ) 注 3: y = y(x ), z = z (x ) 之间必须满足的条件(a)也是一个泛函
1.2
变分的基本概念
变分原理 variational principle: 把一个物理学问题 (或其他学科的问 题)用变分法化为求泛函极值(或驻值)的问题。 如果建立了一个新的变分原理,它解除了原有的某问题变分原理的 某些约束条件,就称为该问题的广义变分原理;如果解除了所有的约束 条件,就称为无条件广义变分原理,或称为完全的广义变分原理。 1964 年,钱伟长教授明确提出了引进拉格朗日成子( Lagrange multiplier)把有约束条件的变分原理化为较少(或没有)约束条件的变 分原理的方法。 日本的鹫津一郎教授、中国科学院院士钱伟长教授和刘高联教授等 都是这方面的世界级大师。
这里假定 y(x ) 是在某一函数类(容许函数)中任意的改变。
2 微分与变分
所谓很小的改变量系指变量函数 y(x ) 与 y1(x ) 的接近程度。 当 dy = y1(x ) - y(x ) 的模很小 时,称 y(x ) 与 y1(x ) 有零阶接近度。当下面诸模都很小时
【精品】5.能量法1(变分法)ppt9.tmp

4 ,bx ,xn Φ= sb1h1v1w bx ,bx 3
已将Z积出,Vy,vz在出口为零?。
s U 4 ,bx ,xn = ,bx ,xn =4 w bx ,bx sb0 h0 v0 w bx ,bx 3 c 3
4 ,bx ,xn σ s vRbn hn w bx ,bx 3
5 能量法(变分法)-以里兹近似解法为基础
基本解析步骤
设定运动许可速度或位移场(自变函数),满足给定边界条件.
把其写成含有几个待定参量的数学式 ?(里兹多项式)
以变分原理建立相应泛函.使其为这些待定参量的多元函数。 求出这些泛函的积分结果;
对待定参量求偏导并令其为零
构成以这些待定参量为变量的联立方程组。 将解得的待定参量带回原泛函的泛函最小值 令泛函最小值与外功相等确定力能参数.
摩擦功率
N f = 4
2
l
0 0
bx
l bx Δv f σs τ f Δv f ds = 4 mU 1+hx2dxdy 0 0 U 3
2 bx y vR 1+ hx Δv f = U + 2 U chxbx chx bx Ubx y U sec + vR 2 ch b ch b x x x x
2 hx bx hx 1 hx I= - 2 hx hx bx hx 2
hx h1 R R 2 l x
2
1 1 Nd = 4 U P x dx 3 2 0
σs
, bx , x Px bx , bx
F d F d 2 F 2 0 dx bx bx dx bx
最新变分法和最优控制专业知识讲座

连续泛函如果满足下列条件:
(1)叠加原理 : J[x1(t)+ x2(t)]= J[x1(t)]+ J[x2(t)] (2) 齐次性: J[cx(t)]=c J[x(t)]
其中,c是任意常数,就称为线性泛函。
例如:
J[x(t) ]t2[t(x t)(st)ix (n t)d ] t t1
定理2-5 若给定曲线x(t)的始端x(t0)= x0和终端x(tf)= xf,
则泛函
J[x(t) ] tf L[x(t)x ,(t)t,]dt t0
达到极值的必要条件是,曲线x(t)满足欧拉方程
Lx ddtLx0 或
欧拉(Euler)方程
其中x(t)应有连续的二阶导数, L[x(t)x ,(t)t,] 则至少应是二次连续可微的。 (证明略)
L[x(t),x(t)]称为泛函的变分,记为
JL [x(t),x(t)]
也就是说,泛函的变分是泛函增量的线性主部。
当一个泛函具有变分时,称该泛函是可微的。
文档来源于网络,文档所提供的信息仅供参考之用,不能作为科学依据,请勿模
6、泛函仿。变文档分如有的不求当之法处,请联系本人或网站删除。
定理2-1 连续泛函J(x)的变分,等于
2Ldx 2Ldx2L x2 dtxxdttx
得欧拉方程的全导数形式
L2Lx2Lx2L0 x tx xx x2
或
L x L x t x L x x x L x x 0
文档来源于网络,文档所提供的信息仅供参考之用,不能作为科学依据,请勿模 仿。文档如有不当之处,请联系本人或网站删除。
其中, L[x(t),x(t),t]及x(t)在[t0,tf]上连续可微, t0及tf 固定,x(t0)= x0,x(tf)= xf, x(t)Rn 求满足上式的极值轨线x*(t)。
变分原理基础_讲义

变分原理基础罗建辉2009年夏季1 能量原理能量原理是以能量形式表述的力学定律。
概括地说,在所有满足一定的约束条件的可能状态中,真实状态应使其能量取极值或驻值。
本课程讨论结构力学、弹性力学、薄板的能量原理,只讨论线性平衡问题。
2 弹性系统真实平衡状态的能量特征举例从能量角度看,弹性系统的真实平衡状态具有如下的能量特征:即与其他可能状态相比,真实状态的能量为极值或驻值。
对这一能量特征举几个简例。
例0—1. 弹簧系统真实平衡状态的能量特征图0—1 所示为一弹簧下端挂一重物。
弹簧的刚度系数为k ,重物的重力为P 。
用∆表示位移,当弹簧系统处于平衡状态时,求得位移∆的真解为kP =∆=∆0)(真解 (1)真解的能量特征是弹簧系统的势能p ∏为极小。
现检验如下:∆-∆=∏P k p221 (2)式(2)右边第一项是弹簧的应变能,第二项是重力P 的势能。
系统势能p ∏是位移∆的二次式。
由式(2)得221()22pP Pk kk∏=∆--(3)现考察真解的能量特征。
显然,真解(1)使势能p ∏取极小值。
换一个角度,求p ∏的一阶及二阶导数,得Pk d d p-∆=∆∏ (4)22>=∆∏k d d p(5)将真解(1)代入式(4),得0=∆∏d d p,故知势能p∏为驻值。
根据式(5),又知势能p∏变分原理广义变分原理单变量形式多变量形式为极小值。
例0—2 超静定梁真实平衡状态的能量特征图0—2a 所示为一超静定梁,取图0—2b 所示静定梁为其基本结构。
根据平衡条件,基本结构的弯矩可表示为PMX M M +=11 (6)其中p M 是在荷载作用下基本结构的弯矩,1M 是在单位多余力11=X 作用下基本结构的弯矩,1X 是任意值。
式(6)同时也是超静定梁满足平衡条件的可能弯矩,由于1X 是任意参数,因此超静定梁的可能弯矩尚未唯一确定。
为了确定1X 的真解,还必须应用变形协调条件)(1111=∆+p X 真解δ (7)式中⎰=∆dxEI M M pp 11 (8)⎰=dxEIM 2111δ试验证真解的能量特征是梁的余能c ∏为极小值,余能c ∏的表示式为dxMX M EIdx EIMpc ⎰⎰+==∏2112)(212 (9)余能c ∏是1X 的二次函数,由式(9)得11111122211221212211112221111111111(2)21[2]21[2]21[()]2p c p p p p p p p p M X M M X M dxEIM dx M M dx M dx X X EIEI EIM dx X X EIM dx X EIδδδδ∏=++=++=+∆+=+∆-∆+⎰⎰⎰⎰⎰⎰(10)由式(10)可知变形协调条件(7)使余能c ∏取极小值。
量子化学_变分法
nn
nn
w cjcksjk cjckH jk
j1 k 1
j1 k 1
因为变分积分是n个独立参数所决定的,可看作为 W=W(C1,C2,…,Cn)
w
ci
n j 1
n
C jCk S jk
k 1
W
ci
n j 1
n
C jCk S jk
k 1
ci
nn
C jCk H jk
j1 k 1
w
0
ci
求:
h2
0 8 2 I
8 2 I
h2
8I
2
S11 0 d 2
2
S13 0 sin d 0
2
S12 0 (1 cos)d 0
S21 S12
S31 S13 0
S22
2 cos2 d
0
2
S32 0 cossin d 0
2
S23 0 sin cosd 0
S33
[
Hˆ
]
c
(24c2
64c
128)(86c 8) (43c2 8c (24c264c 128)2
80)(48c
64)
0
23C2 + 56C – 48 = 0
C1 = -3.107, C2 = 0.6718 得C1代入约2.2380 hv, C2代入约0.5172 hv,即变分积分值为 0.5172 hv,
H11
2 0
f1*Hˆ f1d
2 0
(
h2
8 2
I
d2
d 2
cos )dຫໍສະໝຸດ 0H12 2 0
f1*Hˆf 2d
2 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
JX,X X
这里,JX ,X 是 X 的线性泛函,若 X 0 时,有 , 0 则称 JX ,X 是泛函 J X 的变分。J 是 J
的线性主部。
图3-1自变量函数的变分
6、泛函的极值:
我们知道函数有极值问题,同样道理泛函也 有极值问题。泛函的极值问题就是要求出使泛函 取得最大值最小值的函数
y]
0
0
• 可见泛函取极值的条件与函数取极值的条件是类 似的,但它们之间有本质的差别。函数的极值条 件为自变量在某点处的增量 x 时0函数将以一定 的方式趋于零,即 y f (x0 x) f (x0) 0 ;而泛 函取极值的条件为y=y(x)在某处的变分 y 0时,
泛函以某种方式趋于零。
4、自变量函数的变分: 自变量函数 X (t)的变分 X
是指同属于函数类 X (t)中两个函数X1(t) 、X 2 (t)之差
X X1 (t) X 2 (t)
这里, t 看作为参数。当X (t) 为一维函数时,X 可用图3-1来表示。
5、泛函的变分:当自变量函数 X (t)有变分X 时, 泛函的增量为
2、泛函的连续性:若对任给的 0 ,存在 0
当 X (t) Xˆ (t) 时,就有
J ( X ) J ( Xˆ )
则称J (X ) 在 Xˆ 处是连续的。
3、线性泛函:满足下面条件的泛函称为线性泛函
JX JX
J (X Y ) J (X ) J (Y )
这里 是实数,X 和 Y 是函数空间中的函数。
变分与微分联系
(1).变分与微分在数学意义上等同都是指微小的 变化,因此运算方法相同,但它们的运算对象不 同。
(2).微分运算中,自变量一般是坐标等变量,因 变量是函数。
(3).变分运算中,自变量是函数,因变量是函数 的函数,即泛函。
数 X(t) ,有一个实数 J与之相对应,则称 J为依
赖于函数 X(t) 的泛函。记为
J J{X(t)}
• 粗略来说,泛函是以函数为自变量的函数。
• 一般的泛函就是把函数作为元素来研究的一门学 科,泛函分析,举个简单一点的列子,我们以前 学的函数是把数字作为基本的元素来研究的,现 在更高一个层次,就是元素就是一个函数,比如 全体实系数连续函数构成一个集合A,那么这个A 中每一个元素就是一个函数,而泛函就是研究在 类似于A这种集合到数之间的关系,比如在定义一 个A到实数R的映射f(x),那么x就代表一个函数, 所以有些人也称为是研究函数的函数.
ห้องสมุดไป่ตู้
0
• 其中, 为任意小的正数。
泛函取极值的条件
• 从数学分析中可知,可微函数y=f(x)在x=x0处取 极值的必要条件是该点处dy=0,即:
f x0
x 0
0
• 对于有变分的泛函I=I[y(x)]来说,在 y y0(x) 上 达到极值的必要条件是在该曲线上有 I 0,即:
I[ y0 (x)
所有容许的增量函数
X(自变量的变分),
泛函 J (X )在 X * 处的变分为零,即:
J(X*, X ) 0
为了判别是极大还是极小,要计算二阶变分δ2 J。
但在实际问题中根据问题的性质容易判别是极大还 是极小,故一般不计算δ2 J。 .
变分法
• 研究函数的极值问题用的是微分学,研究泛函极 值的方法是变分法。因此,变分法即研究泛函极 值的方法。
• 研究函数y=f(x)在一点的性态用的是微分。其中 包括自变量的微分dx和函数的微分dy,函数的微 分可写为:
dy f (x x )
0
• 其中 为任意小的正数。
• 类似地,研究泛函在一点的性态用变分。自变函
数y=y(x)的变分记为 y,泛函的变分记为 I 。
• I 的定义为;
I I y(x) y
y y(x)(或y1(x), y2(x)...)
因此,泛函极值即求使泛函取得最大(小)值的 函数。
泛函极值定义: 若存在 0,对满足的 X X * 一切X,J ( X ) J ( X * )具有同一符号,则
称 J (X ) 在 X X *处有极值。
定理: J (X ) 在 X X * 处有极值的必要条件是对于
第三章 用变分法解最优控制 —泛函极值问题
主讲人:翟立强
第一节 变分法基础
• 在动态系统最优控制问题中,性能指标是一个 泛函,性能指标最优即泛函达到极值。解决泛函 极值问题的有力工具是变分法。所以下面就来列 出变分法中的一些主要结果,大部分不加证明, 但读者可对照微分学中的结果来理解。
先来给出下面的一些定义 • 1、泛函:如果对某一类函数 {X(t)} 中的每一个函