linux驱动程序相关头文件简单介绍
linux驱动开发(一)

linux驱动开发(⼀)1:驱动开发环境要进⾏linux驱动开发我们⾸先要有linux内核的源码树,并且这个linux内核的源码树要和开发板中的内核源码树要⼀直;⽐如说我们开发板中⽤的是linux kernel内核版本为2.6.35.7,在我们ubuntu虚拟机上必须要有同样版本的源码树,我们再编译好驱动的的时候,使⽤modinfo XXX命令会打印出⼀个版本号,这个版本号是与使⽤的源码树版本有关,如果开发板中源码树中版本与modinfo的版本信息不⼀致使⽆法安装驱动的;我们开发板必须设置好nfs挂载;这些在根⽂件系统⼀章有详细的介绍;2:开发驱动常⽤的⼏个命令lsmod :list moduel 把我们机器上所有的驱动打印出来,insmod:安装驱动rmmod:删除驱动modinfo:打印驱动信息3:写linux驱动⽂件和裸机程序有很⼤的不同,虽然都是操作硬件设备,但是由于写裸机程序的时候是我们直接写代码操作硬件设备,这只有⼀个层次;⽽我们写驱动程序⾸先要让linux内核通过⼀定的接⼝对接,并且要在linux内核注册,应⽤程序还要通过内核跟应⽤程序的接⼝相关api来对接;4:驱动的编译模式是固定的,以后编译驱动的就是就按照这个模式来套即可,下⾯我们来分下⼀下驱动的编译规则:#ubuntu的内核源码树,如果要编译在ubuntu中安装的模块就打开这2个#KERN_VER = $(shell uname -r)#KERN_DIR = /lib/modules/$(KERN_VER)/build# 开发板的linux内核的源码树⽬录KERN_DIR = /root/driver/kernelobj-m += module_test.oall:make -C $(KERN_DIR) M=`pwd` modulescp:cp *.ko /root/porting_x210/rootfs/rootfs/driver_test.PHONY: cleanclean:make -C $(KERN_DIR) M=`pwd` modules cleanmake -C $(KERN_DIR) M=`PWD` modules这句话代码的作⽤就是到 KERN_DIR这个⽂件夹中 make modules把当前⽬录赋值给M,M作为参数传到主⽬录的Makefile中,实际上是主⽬录的makefile中有⽬标modules,下⾯有⼀定的规则来编译驱动;#KERN_VER = $(shell uname -r)#KERN_DIR = /lib/modules/$(KERN_VER)/build我们在ubuntu中编译内核的时候⽤这两句代码,因为在ubuntu中为我们保留了⼀份linux内核的源码树,我们编译的时候直接调⽤那个源码树的主Makefile以及⼀些头⽂件、内核函数等;了解规则以后,我们设置好KERN_DIR、obj-m这两个变量以后直接make就可以了;经过编译会得到下⾯⼀些⽂件:下⾯我们可以使⽤lsmod命令来看⼀下我们ubuntu机器现有的⼀些驱动可以看到有很多的驱动,下⾯我们使⽤insmod XXX命令来安装驱动,在使⽤lsmod命令看⼀下实验现象可以看到我们刚才安装的驱动放在了第⼀个位置;使⽤modinfo来打印⼀下驱动信息modinfo xxx.ko这⾥注意vermagic 这个的1.8.0-41是你⽤的linux内核源码树的版本号,只有这个编译的版本号与运⾏的linux内核版本⼀致的时候,驱动程序才会被安装注意license:GPL linux内核开元项⽬的许可证⼀般都是GPL这⾥尽量设置为GPL,否则有些情况下会出现错误;下⾯使⽤rmmod xxx删除驱动;-------------------------------------------------------------------------------------5:下⾯我们分析⼀下驱动。
linux 模块驱动存放路径

linux 模块驱动存放路径Linux模块驱动存放路径主要是指Linux操作系统中存放内核模块(.ko文件)的路径。
内核模块是一种能够动态加载和卸载的Linux内核扩展,它们可以为内核添加新的功能或者驱动外部设备,提供更好的系统调节和扩展性。
在Linux系统启动或者在需要时,内核会自动加载相应的模块。
Linux模块驱动存放路径可以有多个,具体的路径和命名规则可能会根据不同的Linux发行版而有所差异。
以下是一些常见的路径:1. /lib/modules/`uname -r`:这是Linux系统中默认的模块存放路径,`uname -r`会替换为当前正在运行的内核版本号。
这个路径下按照内核版本号不同,会有不同的目录,每个目录下放置对应内核版本的模块。
2. /usr/lib/modules/`uname -r`:一些Linux发行版(如Debian、Ubuntu)使用这个路径作为模块存放位置,命名规则和上述路径相同。
3. /lib/modules/:这个路径下可能会包含多个内核版本的模块,每个内核版本有一个对应的目录,模块文件存放在各自的目录下。
4. /usr/local/lib/modules/:一些非官方或自定义的内核模块可能会被安装到这个路径,以避免与系统默认的模块冲突。
在存放路径中,一般会包含多个目录,每个目录可能对应一个或多个内核版本,其中常见的子目录有:1. build/:这个目录包含内核源码,可以用于编译模块。
2. kernel/:这个目录下存放已编译的内核模块文件(.ko)。
3. source/:这个目录中存放内核模块的源代码。
在模块驱动存放路径中,每个模块通常有一个对应的源代码文件(.c或.cpp)和一个已编译的模块文件(.ko)。
模块的源代码文件负责实现模块的功能和驱动逻辑,而模块文件则包含了已编译的二进制代码,可以被内核动态加载和卸载。
除了模块文件之外,存放路径中可能还包含一些其他的文件,如:1. Module.symvers:该文件包含了编译模块时使用的符号表,用于和内核中的符号进行匹配。
linux kfifo 路径

linux kfifo 路径
Linuxkfifo路径指的是在Linux内核中使用kfifo数据结构的相关路径。
kfifo是一个高效的环形缓冲区,可以实现读写操作的异步、无锁等特点。
在 Linux 内核中,kfifo 主要被用于驱动程序中的缓冲区管理,如串口驱动、网络设备驱动等。
kfifo 的路径可以分为以下几个方面:
1. kfifo.h 头文件路径:kfifo.h 头文件定义了 kfifo 数据结构及其相关函数,该头文件路径通常位于 include/linux/kfifo.h。
2. kfifo.c 源文件路径:kfifo.c 文件实现了 kfifo 数据结构相关函数的具体操作,该源文件路径通常位于 kernel/lib/kfifo.c。
3. 驱动程序中的 kfifo 路径:在驱动程序中使用 kfifo 数据结构时,需要包含 kfifo.h 头文件,并调用相关函数进行初始化、读写等操作。
4. 内核中其他模块中的 kfifo 路径:在内核中的其他模块中也可以使用 kfifo 数据结构,需要包含 kfifo.h 头文件,并根据需要调用相关函数。
总之,kfifo 在 Linux 内核中得到广泛应用,熟练掌握 kfifo 的相关路径及其使用方法对于编写高效、稳定的驱动程序非常重要。
- 1 -。
Linux内核目录文件简介
Linux V0.11目录文件简介●Makefile文件:该文件是编译辅助工具软件make的参数配置文件。
●boot目录:功能是当计算机加电时引导内核启动,将内核代码加载到内存中,并做一些进入入32位保护运行方式前的系统初始化工作。
①Bootsect.s:磁盘引导块程序,驻留磁盘第一个扇区。
0x7C00②Setup.s:读取机器的硬件配置参数,并把内核模块system移动到适当的内存位置处。
③Head.s:被编译连接在system模块的最前部分,主要进行硬件设备的探测设置和内存管理页面的初始设置工作。
●fs目录:文件系统实现程序的目录。
1、file_table.c文件中,目前仅定义了一个文件句柄(描述符)结构数组。
2、ioctl.c文件将引用kernel/chr_dev/tty.c中的函数,实现字符设备的io控制功能。
3、exec.c程序主要包含一个执行程序函数do_execve(),它是所有exec()函数簇中的主要函数。
4、fcntl.c程序用于实现文件i/o控制的系统调用函数。
5、read_write.c程序用于实现文件读/写和定位三个系统调用函数。
6、stat.c程序中实现了两个获取文件状态的系统调用函数。
7、open.c程序主要包含实现修改文件属性和创建与关闭文件的系统调用函数。
8、char_dev.c主要包含字符设备读写函数rw_char()。
9、pipe.c程序中包含管道读写函数和创建管道的系统调用。
10、file_dev.c程序中包含基于i节点和描述符结构的文件读写函数。
11、namei.c程序主要包括文件系统中目录名和文件名的操作函数和系统调用函数。
12、block_dev.c程序包含块数据读和写函数。
13、inode.c程序中包含针对文件系统i节点操作的函数。
14、truncate.c程序用于在删除文件时释放文件所占用的设备数据空间。
15、bitmap.c程序用于处理文件系统中i节点和逻辑数据块的位图。
br_dev_xmit_hook 用法
br_dev_xmit_hook 用法br_dev_xmit_hook是Linux内核中一个重要的网络设备驱动程序,用于实现对网络数据包的发送钩子,可以对数据包的发送过程进行定制和控制。
本文将介绍br_dev_xmit_hook的基本用法和注意事项。
一、基本概念br_dev_xmit_hook是一个网络设备驱动程序,它通过插入到网络设备的数据发送钩子中,实现对数据包发送过程的定制和控制。
该驱动程序允许用户自定义发送函数,以便在数据包发送前进行一些自定义的处理,如修改数据包、加入特殊标记等。
二、使用方法要使用br_dev_xmit_hook,需要按照以下步骤进行操作:1.包含相关头文件在代码中需要包含以下头文件:*linux/netfilter_ipv4.h:用于定义网络数据包钩子相关的结构和宏。
*linux/if_bridge.h:用于定义Linux桥接模块的相关结构和函数。
*内核模块相关头文件。
2.注册钩子函数在内核模块中,需要调用register_netdevice_queue()函数注册钩子函数。
该函数需要传入钩子函数的指针和相关参数。
3.实现钩子函数钩子函数需要按照一定的规范进行编写,以便在数据包发送前进行一些自定义的处理。
钩子函数通常需要包含以下步骤:*获取待发送的数据包。
*对数据包进行一些自定义的处理,如修改数据包、加入特殊标记等。
*将处理后的数据包放回队列中等待发送。
以下是一个简单的钩子函数示例:```cstaticvoidmy_xmit_hook(structsk_buff**skb){//对数据包进行一些自定义的处理,如修改数据包、加入特殊标记等//...//将处理后的数据包放回队列中等待发送return;}```4.加载内核模块将编写好的内核模块加载到Linux系统中,可以使用insmod命令或者通过内核配置菜单进行加载。
三、注意事项在使用br_dev_xmit_hook时,需要注意以下几点:1.钩子函数的执行时间:钩子函数需要在数据包发送前执行,以确保对数据包的处理不会影响正常发送过程。
基于rk3568的linux驱动开发——gpio知识点
基于rk3568的linux驱动开发——gpio知识点基于rk3568的Linux驱动开发——GPIO知识点一、引言GPIO(General Purpose Input/Output)通用输入/输出,是现代计算机系统中的一种常用接口,它可以根据需要配置为输入或输出。
通过GPIO 接口,我们可以与各种外设进行通信,如LED灯、按键、传感器等。
在基于Linux系统的嵌入式设备上开发驱动程序时,熟悉GPIO的使用是非常重要的一环。
本文将以RK3568芯片为例,详细介绍GPIO的相关知识点和在Linux驱动开发中的应用。
二、GPIO概述GPIO是系统中的一个基本的硬件资源,它可以通过软件的方式对其进行配置和控制。
在嵌入式设备中,通常将一部分GPIO引脚连接到外部可编程电路,以实现与外部设备的交互。
在Linux中,GPIO是以字符设备的形式存在,对应的设备驱动为"gpiolib"。
三、GPIO的驱动开发流程1. 导入头文件在驱动程序中,首先需要导入与GPIO相关的头文件。
对于基于RK3568芯片的开发,需要导入头文件"gpiolib.h"。
2. 分配GPIO资源在驱动程序中,需要使用到GPIO资源,如GPIO所在的GPIO Bank和GPIO Index等。
在RK3568芯片中,GPIO资源的分配是通过设备树(Device Tree)来进行的。
在设备树文件中,可以定义GPIO Bank和GPIO Index等信息,以及对应的GPIO方向(输入或输出)、电平(高电平或低电平)等属性。
在驱动程序中,可以通过设备树接口(Device Tree API)来获取这些GPIO资源。
3. GPIO的配置与控制在驱动程序中,首先要进行GPIO的初始化与配置。
可以通过函数"gpiod_get()"来打开指定的GPIO,并判断其是否有效。
如果成功打开GPIO,则可以使用函数"gpiod_direction_output()"或"gpiod_direction_input()"来设置GPIO的方向,分别作为输出或输入。
Linux内核头文件(linux headers)
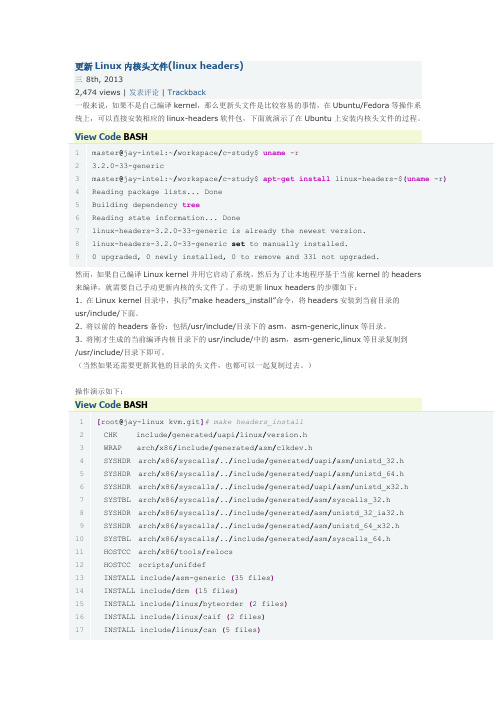
更新 Linux 内核头文件(linux headers)三 8th, 2013 2,474 views | 发表评论 | Trackback 一般来说,如果不是自己编译 kernel,那么更新头文件是比较容易的事情,在 Ubuntu/Fedora 等操作系 统上,可以直接安装相应的 linux-headers 软件包,下面就演示了在 Ubuntu 上安装内核头文件的过程。
View Code BASH1 2 3 4 5 6 7 8 9 master@jay-intel:~/workspace/c-study$ uname -r 3.2.0-33-generic master@jay-intel:~/workspace/c-study$ apt-get install linux-headers-$(uname -r) Reading package lists... Done Building dependency tree Reading state information... Done linux-headers-3.2.0-33-generic is already the newest version. linux-headers-3.2.0-33-generic set to manually installed. 0 upgraded, 0 newly installed, 0 to remove and 331 not upgraded.然而,如果自己编译 Linux kernel 并用它启动了系统,然后为了让本地程序基于当前 kernel 的 headers 来编译,就需要自己手动更新内核的头文件了。
手动更新 linux headers 的步骤如下: 1. 在 Linux kernel 目录中,执行“make headers_install”命令,将 headers 安装到当前目录的 usr/include/下面。
linux 驱动的 ioctl 详细说明

linux 驱动的ioctl 详细说明摘要:1.概述ioctl 的作用和用法2.ioctl 的错误码及含义3.ioctl 的参数4.ioctl 的返回值及意义5.ioctl 在Linux 声卡驱动中的应用正文:一、概述ioctl 的作用和用法ioctl(input/output control)是Linux 系统中一种用于设备控制的系统调用,通过ioctl,用户进程可以对设备进行配置、查询和控制等操作。
ioctl 的用法通常为:```int ioctl(int fd, int request,...);```其中,fd 表示设备的文件描述符,request 表示设备驱动程序所支持的控制请求,后面的省略号表示可能的附加参数。
二、ioctl 的错误码及含义ioctl 系统调用可能返回以下错误码:- -1:表示发生了错误,此时errno 系统变量将包含具体的错误码。
- 0:表示操作成功完成。
- 其他大于0 的值:表示设备的某些特殊状态,具体含义需根据设备类型和驱动程序来确定。
三、ioctl 的参数ioctl 的参数主要包括以下几类:1.设备文件描述符fd:表示要控制的设备的文件描述符。
2.控制请求request:表示要执行的设备控制操作,如配置、查询、控制等。
3.附加参数:根据设备类型和控制请求的不同,可能需要提供不同的附加参数。
这些参数通常是设备驱动程序所支持的数据结构或整数变量。
四、ioctl 的返回值及意义ioctl 的返回值表示设备驱动程序处理控制请求的结果。
如果返回值为-1,则表示发生了错误;如果返回值为0,则表示操作成功完成;如果返回值为其他大于0 的值,则表示设备的某些特殊状态。
具体的错误码和含义可以通过errno 系统变量获取。
五、ioctl 在Linux 声卡驱动中的应用在Linux 声卡驱动中,ioctl 被广泛应用于配置声卡设备、查询声卡状态、控制声音播放等。
例如,通过ioctl 可以实现以下功能:- 获取声卡设备的信息,如设备型号、支持的采样率等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LED驱动程序相关头文件简单介绍
分类:linux驱动开发2011-10-25 21:53 3455人阅读评论(1) 收藏举报cstructoutputmoduletypesfile
[cpp]view plaincopy
在解读OK6410官方提供的LED驱动程序源码的过程中,发现很多没见过的宏和函数。
例如S3C64XX_GPM(0)、
S3C64XX_GPM_OUTPUT(0)、__raw_writel(tmp,S3C64XX_GPMPUD)、__raw_writel(tmp,S3C64XX_GPMCON)等。
而这些都包含在一些头文件里面。
另一方面,我们自己动手编写LED的驱动程序也必须知道相关的头文件有哪些,对我们有哪些用。
因此,我觉得在自己动手编写LED驱动程序之前对相关头文件进行简单的分析是非常有必要的。
以下是我自己结合源码分析得出的一些结论,如有不正确的地方,希望能够得到指正。
OK6410官方提供的LED驱动程序源码:
[cpp]view plaincopy
一、模块相关头文件:
1、#include <linux/module.h>:在编写任何模块都需要包含此头文件。
该头文件自动包含了<linux/version.h>头文件,该头文件包含了宏MODULE_LICENSE("GPL")的定义。
2、#include <linux/init.h>:此头文件也是必须的,module_init()与module_exit()宏就是定义在它里面的。
而且正是这个头文件定义了初始化函数加__init和推出函数加__exit的作用(static int __init s3c6410_leds_init(void)和static void
__exit s3c6410_leds_exit(void))
3、#include <linux/kernel.h>:此头文件也是常用头文件,如果需要使用printk函数,则必须包含此头文件。
另外该头文件还包含了<types.h>头文件,而这个头文件定义许多常用的数据类型,其中就包括设备号类型dev_t。
如下:
[cpp]view plaincopy
二、字符设备驱动相关头文件:
1、#include <linux/fs.h>:该头文件包含了常用的数据结构,当然也包括三种最重要的:struct file、struct file_operation、struct inode。
另外该头文件还包含了<linux/ioctl.h>头文件。
2、#include <linux/cdev.h>:该头文件定义了struct cdev数据结构,也包含了字符设备操作的相关函数:
[cpp]view plaincopy
3、<linux/device.h>:包含自动创建设备文件的相关函数的申明:原函数中-class_create(THIS_MODULE,"my_class")、device_create(my_class,NULL,MKDEV(LED_MAJOR,0),NULL,DEVICE_NAME)。
三、s3c64xx GPIO操作相关头文件:
1、#include <mach/gpio.h>:此头文件包含了对S3C64xx 各个GPIO的宏定义,并包含了各个端口的读写函数,如下:[cpp]view plaincopy
上面的头文件包含了<asm-generic/gpio.h>头文件,该头文件包含了GPIO的数据读写函数,如下:[cpp]view plaincopy
2、#include <plat/regs-gpio.h>:定义了GPIO相关的数据宏:
[cpp]view plaincopy
由上可知此头文件包含了<plat/gpio-bank-a.h>-------><plat/gpio-bank-q.h>系列头文件,而这些头文件里面定义了对应GPIO的一系列数据宏,例如<plat/gpio-bank-m.h>里面定义的是led程序中用到的GPM端口相关的数据宏,如下:
[cpp]view plaincopy
3、#include <plat/gpio-cfg.h>:此头文件包含了GPIO的各种配置函数,例如设置输入输出方式,上拉电阻使能等等:[cpp]view plaincopy。