铅垂面内弹道设计、解算与分析
第2章内弹道部分-part4内弹道解法(一)
( Z 0 x) ( Z 0 x) 2
2 ; 0 1 2Z0 ,并记 K1 0 由 0 Z0 Z0
则
0 K1 x x 2
由三式得:
S 2 I k2 Spdl pdV m v d v xdx m
⑴
S 2 I k2 2 由四式得: p(V V ) f x 2 m
⑵
内弹道的解法
⑴除以⑵得
dV Bxdx V V B x 2 2
⑶
S 2 I k2 由该方程可以得到 V ( x) 。令 B ,这是将各种装填条件综合在一起的无因次 f m
V V0 或 V V0
p
美国的马耶—哈特模型及英国的 RD—38 模型都采用这种简化方法。 ⑷ 燃气生成函数采用两项式 Z (1 Z ) 且其系数满足 (1 ) 1 ,故独立的系数只有一个 。
内弹道的解法
⑸ 恒温假设
mv 2 将④式改写为 p(V V ) f ,式中 f f (1 ) ,因为体现膛内温度 2 f
比较一阶变系数常微分方程
⑷
dV p( x)V Q( x) 0 ,可知上述方程正是这种类型,所以 dx
原则上是可以解的,但实际求解时计算比较麻烦,所以一般用近似解来近似代替。一种 方法是俄罗斯谢烈柏梁可夫最先采用的,将 V 在积分时取为常数 即
V V
V V
0
2
内弹道的解法
dp xm 应满足的方程,然后令 0 ,就可以求出 dt m
xm
K1 B(1 ) 2 1 pm 1 ( ) p f
计及重力补偿的卫星制导炮弹最优制导律设计_何颖
( ) 1 ( ) 2
) 整理后式 ( 可写为如下逆黎卡提方程 : P-1, 8 ) ) ) ) ) P-1( t =P-1( t AT ( t +A( t P-1( t - 烄 -1 T -1 -1 ( ) ( ) ( ) ( ) ( ) () ( ) 烅 B t R t B t +P t Q t P t 9 P-1( t =F-1( t =0 f) f) 烆 、 、 、 ,并 令 P-1 = 将 A B R Q 代入式 ( 9)
针对卫星制导炮弹体积小弹载计算机计算能力有限的特点提出并建立了一种简易的计及重力补偿的最优制导律给出了卫星制导炮弹制导信息获取的数学方法对比例制导律弹着角约束最优制导律计及重力的比例制导律和计及重力弹着角约束最优制导律进行了六自由度弹道对比仿真分析
第2 5 卷第 2 期 2 0 1 3年6月
弹
道
学
报
T T ) 。 由此可以 即 X( t =( x t t 0 0) x ( f) 1( f) 2( f) 这是一个在有限时间内 , 用最小弹道倾角变化 看出 , 使得终 端 状 态 保 持 在 零 值 附 近 的 状 态 调 节 器 率 θ,
1 计及弹着角约束的最优制导律
1. 1 系统运动状态方程 设弹丸与地面固定目标在同一铅垂平面内运动, 其相对运动关系如图 1 所示。 图中, r 为弹目相对距 离; v 为弹丸飞行速度; θ 为弹道倾角。 q 为目标视线角;
, , , HE Y i n YANG X i n i n Y I W e n D A I M i n x i a n u n -m - - g g g j
基于欧拉角的炮弹位姿参数光学测量解析算法
最后 对该 算法进行 了完整的数学仿 真。仿真结果表明 , 算法 简单有效且稳定 , 该 能满足位姿参数测
量 的 精度 要 求 。
关键 词 : 炮弹 ; 目视觉 ; 单 欧拉 角; 相对位置 ; 对姿 态 相
中 图 分 类 号 :J02 3 T 1. 文献 标 识 码 : A 文 章 编 号 :6 1 64 20 ) 3 06 — 6 17 — 5 X(09 0 — 0 8 0
肖明杰
( 放军 炮兵 学院 信 息化 弹药研发 中心 , 解 安徽 合肥 20 3 ) 30 1
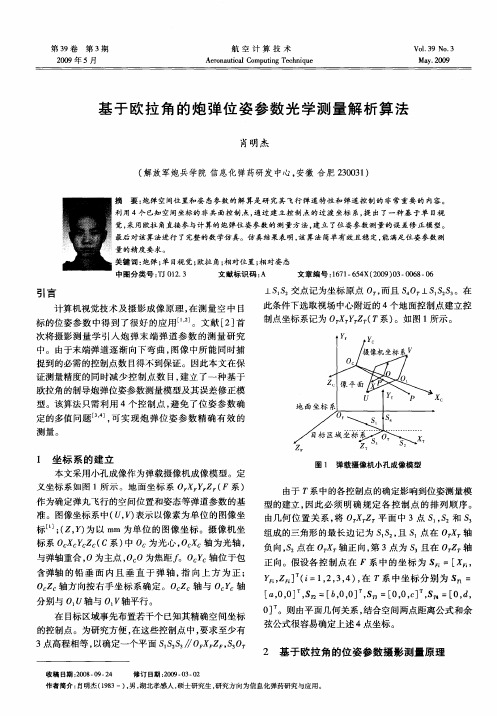
摘 要: 炮弹空间位 置和姿 态参数 的解 算是 研 究其 飞行 弹道特性 和弹道控 制 的非常 重要 的 内容。
利用 4个已知 空间坐标的非 共面控制 点 , 过建立控 制 . 通 是的过渡 坐标 系, 出 了一种基 于单 目视 提 觉 , 用欧拉角直接 参与计算 的炮 弹位 姿参数 的测量方 法, 采 建立 了位 姿参数测 量的误差修 正模 型。
负 向 , 点在 O X 轴 正 向 , 3点 为 . 且 在 O 第 s , 轴
与弹轴重合 , 0为主点 , 。 0 0为焦距f 。 c o0 y 轴位于包
含 弹轴 的铅 垂 面 内 且 垂 直 于 弹 轴 , 向 上 方 为 正 ; 指 0 Z 轴 方 向按右 手 坐标 系确 定 。0 Z 。轴 与 0 y c轴 分别 与 0 U轴 与 0 V轴平 行 。 ,
在目 标区域事先布置若干个 已知其精确空间坐标 的控制点。为研究方便 , 在这些控制点中, 要求至少有 3 点高程相等 , 以确定一个平面 J.s/0 X Z , 0 ss 。 , , ,J : / s
弦公式很容易确定上述 4点坐标。
2 基 于 欧拉 角 的 位 姿 参数 摄 影 测 量 原 理
第二炮兵工程大学考研试题862飞行力学(2015年~2016年)
第二炮兵工程大学2015年硕士生招生考试初试业务课考试试题862飞行力学科目代码:862科目名称:飞行力学适用学科:航空宇航科学与技术、航天工程(专业学位)一、填空题(本题满分15分,其中每小题各3分。
)1. 导弹的可用过载定义为 偏转到 值时的导弹所能产生的 过载。
2.导弹作为刚体的六自由度动力学模型包括 个描述 移动的动力学方程和 个描述 转动的动力学方程。
3.作用在飞行器上的空气动力一般可以分解在 坐标系的 轴、 轴、 轴上,分别称其为 力、 力、 力。
4. 导弹做等速直线爬升的方案飞行,其应满足的条件为 。
5. 弹道偏角定义为 矢量在 的投影与 的夹角。
二、判断题(本题满分15分,其中每小题各3分。
请在每题的A 、B 答案中判断出一个正确的结果填入每题的括号内。
)1.动力学弹道 ( )A. 由动力学方程和运动学方程所确定的导弹重心运动轨迹B. 将导弹视为可控质点,由运动学方程和理想约束方程所确定的导弹重心运动轨迹2. 可用过载 ( )A. 对应于临界迎角的法向过载B. 舵面偏转到最大值时,平衡飞行器所能产生的法向过载3. 寻的制导( )A. 不需从目标或制导站提供信息,完全由弹上制导设备产生导引信号, 使导弹沿预定弹道飞向目标B. 利用弹上导引装置接收目标辐射或反射的能量形成导引信号,控制导弹飞向目标4.导致下洗延迟力矩的参数( )A. B.,αβ ,,x y z ωωω5.飞行器焦点定义为( )A. 总空气动力的作用线与飞行器纵轴的交点B. 由攻角所引起的那部分升力的作用点Y αα⋅三、计算题(本题满分45分,其中每小题各15分。
)1.已知导弹舵面升力为100kg ,舵面压心至铰链轴的距离为 0.5m ,求当舵偏角和攻角分别为15和20时,所产生的铰链力矩值。
2.已知导弹质量为922.5kg , 推力和升力导数分别为367kg 和120kg /,求导弹Y α 以25的弹道倾角做直线爬升铅垂平面运动时的俯仰角值。
铅垂平面内有控导弹弹道仿真

铅垂平面内导弹弹道仿真及分析实验报告摘要本文以铅垂平面内有控飞行导弹的运动方程组为例,根据其数学模型,结合给定初值条件和导引方法,对有控飞行追踪目标的导弹进行数学仿真。
由于该运动方程组的数学模型很难得到它的解析解,所以工程上一般采用数值分析方法求取它的数值解。
本文采用四阶龙格库塔法、不等距单变元抛物线插值、不等距双变元抛物线线插值等数值分析方法结合C++编程语言来实现数值运算,得到了在给定初始条件和控制信号作用下的弹道飞行参数。
根据计算所得各项数据结合Matlab软件的绘图功能,可以得到在有控条件下导弹命中既定目标的弹道曲线和各项参数随时间变化的曲线。
关键词:铅垂平面内有控飞行运动方程组数值算法弹道仿真一、 绪论导弹运动方程是表征导弹运动规律的数学模型,也是分析、计算或者模拟导弹运动的基础。
完整描述导弹在空间运动和制导系统中各个元件工作过程的数学模型是相当复杂的、在不同的研究阶段,不同的设计要求,所需建立的导弹运动模型也不相同。
建立导弹运动方程组以经典力学为模型,涉及变质量学、空气动力学、推进和控制理论等方面。
一般来说、运动方程组的数目越多,描述导弹的运动越准确、越完整。
但是研究和解算也就相应的越复杂。
在工程上,特别是导弹和制导系统设计初级阶段,在解算精度允许的范围内,对方程组进行一定的简化,以便利用较简单的运动方程组来达到研究导弹运动的目的。
例如,在一定的假设条件下可以把导弹运动方程组分解为纵向运动和侧向运动,或简化为铅垂面内的运动方程组和水平面内的运动方程组等。
实践证明,这些简化和分解都具有一定的实用价值。
本文就是研究经过简化后的在铅垂面内飞行的导弹运动。
二、 铅垂平面内有控飞行导弹的运动方程组数值积分利用计算机编程求解运动方程组,首先要选定一个可靠的计算方案。
包括数学模型的建立、原始数据、计算方法、初值及初始条件、计算要求等。
本文计算的步骤如下。
1. 建立数学模型➢ 铅垂平面内有控飞行导弹运动方程组14cos sin sin cos cos sin 00zz zzC dV mP X mg dtd mV P Y mg dtd J M dtdxV dt dy V dtd dt dmm dt αθθαθωθθϑωαϑθφφ⎫=--⎪⎪⎪=+-⎪⎪⎪=⎪⎪⎪=⎪⎪⎬=⎪⎪⎪=⎪⎪=-⎪⎪⎪=-⎪=⎪⎪=⎭➢ 目标运动方程组cos cos sin cos sin t t t Vt t t t t t t Vt dx V dtdy V dt dz V dt θψθθψ⎫=⎪⎪⎪=⎬⎪⎪=-⎪⎭➢ 弹目相对运动方程组cos()cos()sin()sin()t y t y y t y t y dr V q V q dt dq r V q V q dt θθθθ⎫=---⎪⎪⎬⎪=--+-⎪⎭2. 原始数据求解导弹运动方程组,必须给定所需的初始数据,它们一般来源于总体初步设计、估算和实验结果。
最新302026王勋汇总
2009302026王勋航空外弹道学课程设计姓名:王勋班级: 08030902班学号: 2009302026 时间: 2012.7.12一、已知条件及题目要求1. 查表可知,标准下落时间()21.12S s s =2.气象:760on h mmHg =288.4on K τ=29.27R =温度梯度35.86210G -=⨯度/米8.4on mmHg =e3. 弹丸参数:216.5q kg =0.299d m =弹长 2.11L m =9.806g =4. 空气阻力系数:00.160x C =5. 初始条件:400/u m s =0w =0p =2000m H =要求:列出弹道参数,并画出炸弹弹道曲线。
二、题目分析对于所给题目,取直角坐标系Oxy ,坐标原点取在投弹高度为H 的投弹点O 上,x 轴取在飞机投弹瞬间速度1v →的铅垂面(投弹面)内的水平方向,y 轴铅直向下,如图1所示。
转角方向规定顺时针为正。
设弹道上任一点M 速度向量v →在x 轴与y 轴上的分量分别为u 与w 。
图1 水平轰炸图由题目给出的条件,P=0,W=0可以知道,所要设计的题目类型为无外力的水平轰炸,由于飞机速度V 在X 轴方向上,因而初始条件为:当0t =时,u v,w 0,x=0,y 0,0.θ====建立方程组如下:22()G(v )1=()G(v )+cos equations(1)sin =+on du CH H y dt d CH H y g dt dx u v dtdy v dt v u τττττωωθωθτωτ⎧=--⎪⎪⎪--⎪⎪⎪==⎨⎪⎪==⎪⎪⎪⎪⎩()(2)(3)(4)(5)三、相关参数计算(1)弹道系数C 的计算0.2460.650.16C C i x0x0===2233id 0.2460.299C 10100.10158216.5q ⨯=⨯=⨯= 其中d 为弹直径,q 为炸弹的重量。
(2)288.4G*(2000)y τ=+-,其中310*862.5G -=(3)查表得)Ma (C x0,其中:v Ma a v *(288.40.005862*2000-0.005862y)^0.520.074v *(300.124-0.005862y)^0.520.074==+= Ma 可作如下近似)Ma (C x0=(4)(v )G τ的计算on onH τγττγ 其中0()x v C a由(3)可求得,τ由(2)计算可求得。
最新弹道计算大作业
最新弹道计算⼤作业弹道计算⼤作业⽬录⼀、初始条件和要求 (2)1.1 初始条件 (2)1.2 仿真要求 (2)⼆、模型的建⽴ (2)2.1 升⼒和阻⼒模型 (2)2.2 ⼤⽓和重⼒加速度模型 (3)2.3 ⽆控飞⾏ (3)2.4 平衡滑翔 (4)2.5 最⼤升阻⽐滑翔飞⾏弹道 (4)三、仿真结果 (5)3.1 ⽆控飞⾏弹道仿真 (5)3.2 平衡滑翔弹道仿真 (7)3.3 最⼤升阻⽐滑翔弹道仿真 (8)附录 (9)⼀、初始条件和要求1.1 初始条件已知给定的初始条件如下:表1 初始条件1.2 仿真要求请使⽤Simulink或Buildfly完成以下仿真任务:(1)请完成该导弹的⽆控飞⾏弹道仿真;(2)请完成该导弹的平衡滑翔⽅案飞⾏弹道仿真;(3)请完成该导弹的最⼤升阻⽐滑翔飞⾏弹道仿真;⼆、模型的建⽴2.1 升⼒和阻⼒模型已知展弦⽐为λ的飞⾏器的升⼒线斜率为:y C α=(1)根据飞⾏⼒学相关知识,飞⾏器的升⼒系数和阻⼒系数为:()20y y x x y C C C C C ααε?=??=+?? (2)其中,升⼒线斜率由(1)式可得;ε为效率系数:1e επλ=。
由升⼒系数和阻⼒系数,得到导弹的升⼒和阻⼒为:221212x yX C v S Y C v Sρρ?== (3)2.2 ⼤⽓和重⼒加速度模型在计算过程中,⼤⽓密度采⽤如下模型:4.25588000.0065=1H T ρρ??- ?(4)其中,30 1.225/kg m ρ=为海平⾯的⼤⽓密度;0288.15T K =。
重⼒加速度采⽤如下模型:20d d R g g R H ??= ?+??(5)其中,09.8g =,6371000d R m =为地球半径;H 为飞⾏器距离地⾯的⾼度。
2.3 ⽆控飞⾏假设导弹的运动始终在铅垂平⾯,根据飞⾏⼒学知识,得到导弹⽆控飞⾏时的运动学和动⼒学⽅程为:sin cos cos sin dV X g dt m d Y g dt mV V dxV dt dyV dt θθθθθθα?=--??=-===-(6)在上述模型中,假设俯仰⾓?为0。
铅垂平面飞行弹道 仿真及分析 实验报告
铅垂平面飞行弹道仿真及分析实验报告姓名:Raigu学号:2005班级:0211CONTENT1. 实验内容与要求 (1)1.1. 实验名称: (1)1.2. 内容与要求: (1)2. 实验实现分析 (1)2.1. 数学模型 (1)2.2. 软件选择 (2)2.3. 原始数据: (2)2.4. 相关公式 (5)2.5. 弹道计算的相关算法 (5)3. 数据仿真 (6)3.1. 实验数据处理 (6)3.2. 程序运行 (6)3.3. 函数作用说明 (6)3.4. Matlab函数程序: (7)3.5. 相关数据的图象 (10)4. 仿真结果分析 (13)4.1. 导弹的受力变化 (13)4.2. 速度变化 (14)4.3. 弹道 (14)4.4. 攻角的变化 (15)4.5. 弹道倾角的变化 (15)4.6. 俯仰角的变化 (15)4.7. 俯仰角速度的变化 (15)4.8. 俯仰静稳定力矩和阻尼力矩 (16)1. 实验内容与要求1.1. 实验名称:铅垂平面飞行弹道仿真及分析1.2. 内容与要求:根据描述飞行器在铅垂平面内运动的数学模型,编制某导弹的铅垂平面无控飞行弹道仿真程序,利用计算机解算初始段无控飞行弹道,对初始段弹道参数的变化规律进行分析。
2. 实验实现分析2.1. 数学模型1、本实验所用的数学模型要描述在铅垂平面内飞行的导弹,于是数学模型如下面方程所述:cos sin sin cos cos sin z z z z z z z c dV P X G dtd mV P Y G dtd J M M dtd dt dx V dtdy V dtdm m dtωααϑθαθθαθωωϑωθθ=−=−−=+−=+====−以上数学模型需满足下述假设条件:侧向运动参数,,,,x y V βγγωω及舵偏角,x y δδ都比较小。
这样就可以令:cos cos cos 1V βγγ≈≈≈且略去小量的乘积sin sin ,sin ,,sin x y y V V z βγγωωωγ……以及参数βδδ对阻力X的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
铅垂面内弹道设计、解算与分析檀望春,李禹志,李坤猷,陈国勇北京理工大学飞行器设计与工程专业摘要:基于MATLAB的对铅垂面内弹道设计的数值模拟仿真。
在给定的参数条件下设计合理的飞行方案并研究导弹在不同飞行状态下(爬升段、平飞段、俯冲段)攻角、速度等的变化及其飞行轨迹。
关键词:数值模拟、飞行轨迹、铅垂面。
The Design, Analysis and Solver of Vertical Plane TrajectoryTAN Wang-chun, LI Yu-zhi, LI Kun-you, CHEN Guo-yongAbstract: Design the vertical plane trajectory which based on MATLAB simulation. Under the conditions of the given parameters design the missile flight plan and study with the angle of attack, speed of change and its flight path at different flight conditions (climb segment, level flight segment, dive segment) .Keywords: Numerical simulation, Flight path, Vertical plane.导弹作为现代战争中最重要的武器之一一直备受重视。
导弹以它的精确制导打击目标和强大的破坏性能改变整个战场的格局给现代战争带来了深刻的影响。
导弹的运动以及控制是十分复杂的。
研究导弹的空间飞行状况首先应当研究导弹的弹道学方面的问题。
将导弹的运动看成质点的运动并且假定导弹的制导系统是完全理想的。
在导弹飞行的各个状态下导弹所受外力的和力矩为零。
因此,在质点上作用重力、推力、空气动力等,研究这些力和导弹的运动之间的关系,加上制导系统理想工作的约束关系式,就可以求出导弹质心的运动轨迹——弹道、飞行速度和过载等的参数。
通过这种方法我们可以简洁明了的了解导弹是如何运动的。
即使这样导弹的运动依旧是很复杂的,导弹在空间的运动有20个独立的方程来进行描述,由于知识和能力所限本文以掠海导弹为对象在上述假定条件下根据一些假定的空气动力学参数通过MATLAB进行数值模拟仿真描绘铅垂面内弹道的设计、解算与分析。
1.设计目标导弹在纵向平面内有明显的爬升段、平飞段、俯冲段和拉起改平段。
平飞段高度H=300m,俯冲拉起改平后,平飞高度为H=50m。
导弹的攻角在正负十度范围以内。
设计合理的纵向稳定与控制规律,使导弹按预先设计的方案飞行并使各段弹道平稳连接。
其中高平飞段的高度误差应小于±10m,低平飞段的高度误差应小于±5m。
导弹在低平飞段的某处,所有燃料耗尽,导弹仍需要按上述精度要求继续平飞,直到飞行速度低于200m/s。
在爬升段到高平飞段之间引入风场。
风场速度时刻与导弹速度方向相反,风力大小随机变化。
2.导弹数学模型的建立导弹无控时的运动方程如下:cos sin sin cos cos sin z z z z z z z cdV m P X mg dt d mV p Y mg dt d J M M dt d dt dx V dtdy V dtdmm dt ωααθθαθωαωϑωθθαϑθ⎧=--⎪⎪⎪=+-⎪⎪⎪=+⎪⎪⎪=⎨⎪=⎪⎪⎪=⎪⎪⎪=-⎪⎪=-⎩ (1) 上式中,v 、θ、x 、y 、m 、ϑ、ωz 、α、δz 分别为导弹的飞行速度,弹道倾角、射程和高度导弹的质量,导弹飞行时的俯仰角、俯仰角速度、攻角和升降舵的舵偏角。
上述方程刚好封闭可以求解。
在爬升段和平飞段按给定的弹道倾角飞行,为了使控制的高度更精确在俯冲段和拉起改平段按给定的高度飞行。
由此引入控制方程:θ∗={ θ0 t 0≤t ≤t 1θ0e −t−t 1K 1 t 1≤t ≤t 20 t 2≤t ≤t 31− e K 2(t−t 3) t 3≤t ≤t 4(2) y ∗={56y p e −K 3(t−t 4)+16y p t 4≤t ≤t 516y p t 5≤t (3) 启控时间t 0之前导弹无控飞行,启控一段时间以后导弹按给定弹道倾角方案飞行,t 4 时刻导弹按给定高度控制方案来进行俯冲阶段的飞行。
为了使目标各阶段平滑过渡给定高度导数和角速度反馈控制关系方程:δz ={ 0 0≤t ≤t 0K 4(θ−θ∗)+K 5dy dt +K 6ωz +δz0 t 0≤t ≤t 4K 4(y −y ∗)+K 5dy dt +K 6ωz +δz0 t 4≤t (4)在(1)中加入以上的控制关系方程增加了一个未知量的同时增加了一个方程所以方程组依旧封闭可以进行求解运算。
K 1~K 6是各个控制方程的系数,它通过对程序的不断调试,控制其余系数不变,改变某一系数进行编程的模拟仿真来观察此系数对攻角以及各阶段参数的影响进而调整该系数到合适的值。
各阶段参数:t 0=2.3s t 1=3s t 2=6s t 3=20s t 4=26s t 5=30.48s直线爬升段:(t 0~t 1)θ0=21.4°K 4=5 K 5=0 K 6=4爬升转平段:(t 1~t 2)K 1=1.3 K 4=3 K 5=0 K 6=1平转俯冲段:(t2~t3)K4=6K5=0K6=1 δz0=2°俯冲段:(t3~t4)K2=0.2 K4=0.2K5=0K6=0.2 δz0=2°俯冲转平段:(t4~t5)y p=300 K3=0.5 K4=0.1K5=0.15 K6=4平飞段:(t5以后)K4=0.6∗e0.001∗(y−50)K5=0.5K6=13.风场的引入导弹的飞行环境中风是时时刻刻都存在的,而且风对导弹的过载尤其是法向过载和侧向过载有很大的影响。
因此,在真实的飞行状况下风的影响在设计时是必须加以考虑的。
当导弹突然遇到与速度方向平行的风时,可以认为此时的迎角不变,而是导弹相对于大气的飞行速度增加了。
设水平风速为∆v,此时导弹的升力值为:Y=C y0Sρ2(v0+∆v)2(5)式中:C y为相应于初始迎角α0时导弹的升力系数:ρ为空气密度;S为弹翼面积;v0为导弹的飞行速度。
对于高速飞行的导弹,一般∆v<0.1v0,所以对导弹的法向过载影响不大,但是在导弹起飞时,因为导弹的飞行速度过低,风的影响就很大。
鉴于此我们设计的风场时刻与导弹的速度方向相反,其大小的变化量随机产生。
所以导弹的飞行可以近似认为是导弹的速度大小相对变化了一定的值。
由此我们将(5)式引入原来的控制模型中建立了导弹的有风场时运动的数学模型。
4.编程实现采用MATLAB进行编程实现。
由于龙格库塔方法计算精度比较高,自启动且易于进行编程实现。
我们采用它来进行积分计算。
取步长为0、02.初始控制条件如下:发射速度v0=20m/s,导弹初始俯仰角 ϑ0=30°,初始起飞质量m0=55kg,发射推力P=P(t),初始攻角α0=0,初始弹道倾角θ0=0。
5.图像分析通过MATLAB的编程数值模拟仿真我们分别绘制了无风情况和有风情况下导弹的飞行高度与时间关系的变化曲线,攻角与时间关系的变化曲线以及飞行速度与时间关系的变化曲线。
另外我们还分别绘制了无风场情况下的导弹整体运动的高度、攻角和速度与时间变化关系曲线以及导弹飞行轨迹曲线。
5.1无风场情况与有风场情况下各参数变化与时间关系直线爬升段:图(1)无风场时高度图(2)有风场时高度上图中明显可以看出两者的曲线形状类似比较光滑。
在有风场的情况下没有明显的震荡出现。
引入风场情况下的曲线上升明显比较快,在2.5s时引入风场下的导弹高度大约为143m而无风场情况下的导弹飞行高度为130m。
这是由于风场的引入使导弹飞行时的攻角增大,导弹上升速度有明显的加快。
图(3)无风场时攻角曲线图(4) 有风场时攻角曲线上图中明显可以看出2.3s前导弹在有风场和未引入风场的情况下飞行攻角曲线变化规律基本一致,攻角出现最大和最小值的时间基本一致。
但是在有风场干扰的情况下导弹的攻角明显增大。
无风场情况下导弹攻角最大值为2.7°。
有风场情况下导弹的攻角最大值为2.1°。
在2.3s以后导弹进入控制阶段,无风场情况下导弹攻角迅速增大使弹道倾角迅速达到要求值。
有风情况下攻角上升比较缓慢。
图(5)无风场时速度曲线图(6) 有风场时速度曲线上图中明显可以看出有风场和无风场情况下速度曲线变化基本一致。
说明沿速度方向的风值与导弹飞行速度相比比较小。
对导弹的飞行速度影响不大。
爬升转平段:图(7)无风场时高度曲线图(8) 有风场时高度曲线上图中明显可以看出两者整体高度变化情况基本一致没有明显的震荡。
引入风场情况下导弹的飞行高度在此阶段明显比未引入风场情况下高度大,无风场情况下导弹的最大飞行高度294.2m,有风场情况下导弹的最大飞行高度为297m。
图(9)无风场时攻角曲线图(10) 有风场时攻角曲线上图中明显可以看出两者整体攻角变化情况一致。
但是在引入风场以后导弹的攻角明显变化比较大。
未引入风场的情况下最大攻角为11°,引入攻角情况下最大攻角为17°。
图(11)无风场时速度曲线图(12) 有风场时速度曲线上图中明显可以看出两者整体速度变化情况一致。
但是在引入风场以后速度比未引入风场速度变化大一些。
未引入风场的情况下最小速度为238.8m/s,引入攻角情况下最小速度为234.2m/s。
平飞段:图(13)无风场时高度曲线图(14) 有风场时高度曲线上图中明显可以看出两者整体曲线变化情况一致。
引入风场后最大飞行高度有所增大。
图(15)无风场时攻角曲线图(16)有风场时攻角曲线上图中明显可以看出两者攻角改变频率非常大。
无风稳定情况下攻角变化在−3°~6°间,有风稳定情况下攻角明显比较收敛幅度变化在−2°~5°间。
图(17)无风场时速度曲线图(18) 有风场时速度曲线上图中明显可以看出有风场情况下导弹的速率变化比较大,有风情况下导弹的速度最大为249m/s,无风情况下导弹的最大速度为246m/s。
5.2无风情况下导弹的整体运动曲线图(19) 无风场时弹道曲线图(20)无风场时高度曲线图(21)无风场时速度曲线图(22)无风场时攻角曲线导弹在6.2s时达到最大高度h=295m,高平飞时最低高度为292m,高度误差满足要求。
地平飞段稳定飞行在高度h=47m,最低高度45.2m高度误差满足要求。
由图(20)中明显可以看见导弹的稳定飞行高度并不在300m,有一定的偏差,收敛没有低平飞段的结果好。