炮塔转动参数检测系统设计
某新型火炮随动系统的性能测试系统设计
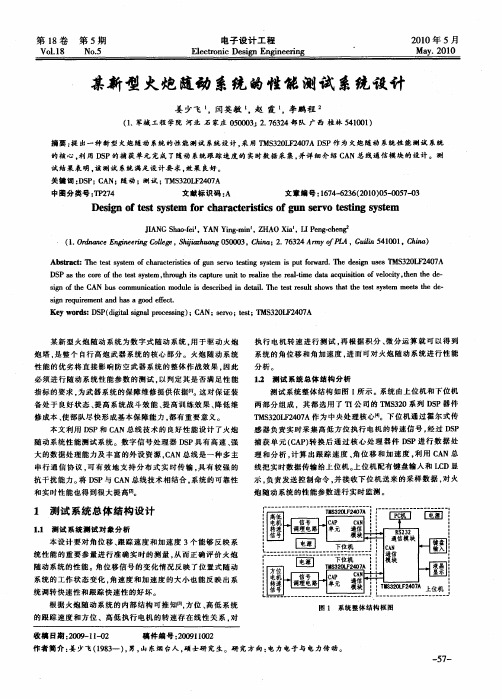
2 C N 总 线 通 信 接 口 电 路 . 2 A 内置 于 U 0 A的 C N总 线 控 制 器 可 以 用来 完 成 C N 47 A A
须 在 双 绞 线 两 端 f C两 个 l 0Q 的 匹 配 电 阻 来 消 除 长 线 反 R X D 连 接 一¨一¨¨ 一 一 D 一v T C X e 2
出 的 信 号 . 后 对 采 集 然 数据进行处 理分析 。 D P与 C N控 制 器 之 S A 间 以 响 应 中 断 方 式 实 现 通 讯 。 过 数据 处理 经 后 的 数 据 送 给 L D显 C
Байду номын сангаас
示。 以对数据进行保存
和 分 析 , 扫 描 有 效 按 并 键 , 断 键 值 , 进 入 判 并
R4 t 3 0】 9 【
B I N N
VC C
图 3 C N 总 线 通信 接 口 电路 A
3 测 试 系统应 用 软件 设 计
31 软 件 总 体 设计 . I 30 F 4 7 的 软 件 设 计 和 调 试 是 在 D P集 成 开 发 MS 2 L’ o A 2 S 环 境 C S 0 0下 进 行 的 。 用 C语 言 和 汇 编 语 言 相 结合 的方 C 20 采
的 T S  ̄ P O设 置 为 0 1选 8分 频 . 定 时 器 3每 隔 T 8 P 2TS l。 则 =/ 4 z02m 计 数 一 次 。 测速 主程 序 如 图 5所示 。 0MH = . 8
行 初 始 化 , 动 D P定 时 器 和捕 获 单 元 。 集 转 速 传 感 器 输 启 S 采
信 号 的测 量 。本 系 统 时钟 频率 为 4 z计 数 器最 大 计 数 为 0MH 。
坦克炮塔转动惯量测量方案设计

某自行高炮浮动参数监测系统的设计与实现

某自行高炮浮动参数监测系统的设计与实现孙致远;郑坚;熊超;殷军辉【摘要】为了能够实时掌握自行高炮自动机性能,提高装备的可靠性,利用无线传感器网络技术,设计并建立了自行高炮浮动参数监测系统。
该监测系统利用磁致伸缩位移传感器,实现了后坐位移的精确测量;设计了一种具有高速采集和片上处理功能的无线传感器网络节点,实现了数据的采集、储存与无线传输;开发了上位机软件,能够根据回传数据,完成后坐曲线的显示和浮动参数的自动提取。
实弹测试试验表明,该监测系统能够基本满足自行高炮浮动参数在线监测的要求。
%For the purpose of keeping track of the performance of the auto-mechanism of self-propelled anti-aircraft gun and improve its reliability,the floating parameter monitoring system of self-propelled anti-aircraft gun was designed and established based on the wireless sensor networks (WSNs)technolo-gy. In the monitoring system,the magnetostriction displacement sensors were used to successfully and accurately pick up the recoil displacement. A WSN node with high speed acquisition and on-chip pro-cessing was designed to realize the data collection,storage and wireless transmission. The host compu-ter software was designed to achieve the recoil curve display and the floating parameter automation ex-traction according to the data received. The firing test shows that the system can basically satisfy the floating parameter on-line monitoring requirement.【期刊名称】《火炮发射与控制学报》【年(卷),期】2016(037)002【总页数】5页(P62-66)【关键词】浮动参数;状态监测;位移传感器;无线传感器网络【作者】孙致远;郑坚;熊超;殷军辉【作者单位】军械工程学院,河北石家庄 050003;军械工程学院,河北石家庄050003;军械工程学院,河北石家庄 050003;军械工程学院,河北石家庄 050003【正文语种】中文【中图分类】TJ206自动机是自行高炮火力系统重要的组成部分之一,直接实现弹丸的快速连续击发。
坦克炮塔转动惯量测量

坦克炮塔转动惯量测量坦克是现代装甲部队的重要装备,其中坦克炮是坦克最主要的战斗武器之一。
而坦克炮的炮塔转动惯量是影响坦克炮精度和作战效能的重要因素之一。
因此,对坦克炮塔转动惯量的测量就显得非常重要。
本文将介绍坦克炮塔转动惯量测量的原理、方法及其应用。
1. 坦克炮塔转动惯量的意义坦克炮是坦克战斗力的核心,它的精度和射速都是影响其作战效能的重要因素。
而炮塔转动惯量则是影响炮塔转动速度和精度的因素之一。
转动惯量越大,炮塔的转速就会越慢,从而影响射击精度和作战效率。
因此,测量坦克炮塔转动惯量对于保障坦克作战效能有着重要的意义。
2. 坦克炮塔转动惯量的测量方法(1)旋转法旋转法是最为常见的坦克炮塔转动惯量测量方法。
具体测量步骤如下:1)将坦克炮塔固定在一个水平的转盘上。
2)测量并记录炮塔的总重量。
3)以转盘中心为转轴,给予一个初速度使炮塔开始转动。
4)测量炮塔随时间的转动角度,并记录下来。
一般建议测量时间不少于5分钟。
5)根据测量数据可以求得炮塔的转动惯量。
其中,炮塔转动惯量的测量公式为I=J+(m+M)R²,其中I为转动惯量,J为转盘的转动惯量,m为炮塔的质量,M为转盘的质量,R为转盘的半径。
(2)振荡法振荡法比旋转法测量时间短,但相对较为复杂。
具体测量步骤如下:1)将炮塔的传动机构制动,使炮塔停止转动。
2)给传动机构以一个适当的扭矩,使炮塔开始振荡。
3)测量炮塔的振动时间和振动周期,并记录下来。
4)根据测量数据可以求得振荡法下的炮塔转动惯量。
其中,炮塔转动惯量的测量公式为I=mgL/4π²T²,其中m 为炮塔的质量,g为重力加速度,L为振动长度,T为振动周期。
3. 坦克炮塔转动惯量测量的应用坦克炮塔转动惯量的测量结果可以为军队提供重要的参考数据。
首先,在坦克设计和制造中,测量得出的炮塔转动惯量数据可以为坦克炮塔的设计和制造提供重要依据,提高坦克的作战效能。
其次,在坦克使用中,测量得出的炮塔转动惯量数据可以为坦克的使用和维护提供参考,从而保障坦克的稳定性和安全性。
浅析炮控系统性能参数测试方案

浅析炮控系统性能参数测试方案【摘要】随着高新技术在坦克武器系统研发中的广泛应用,现行的测试手段已无法满足新型坦克武器系统鉴定试验的要求。
因此,迫切需要开展相应的武器系统总体试验技术的研究,通过研制高精度的坦克炮控性能测试系统,来满足试验鉴定的需要。
【关键词】炮控系统;测试参数;光纤陀螺鉴于目前落后的人工测试手段,为了提高测试精度,缩短实验周期,兼顾节约实验经费,依据炮控系统测试技术特点,可选择的测试方案有以下4种:(1)CCD+点光源;(2)激光器+PSD光学测量靶;(3)光纤陀螺;(4)电测法。
D+点光源将点光源和标尺安装在炮筒的前端,与CCD(Charge Coupled Device)正对的方向;由点光源在CCD中成像,以此来识别炮筒的位移;同时在点光源平面处设立标尺,来对CCD进行标定[1]。
其原理如图1所示,在这种方案下,点光源所成像的位移实际就是炮筒的位移。
影响测量精度在于两个主要的方面,一是CCD的单位像素,一是点光源与CCD之间的距离变化带来的非线性误差。
图1 CCD+点光源测试原理图2.激光器+PSD光学测量靶PSD(Position Sensitive Detector)是一种半导体位置敏感器件,其工作原理是基于横向光电效应,又称侧向光生伏特效应或殿巴(Dember)效应[2]。
将激光器固定在炮管上,发射激光照射到位于炮口正前方的测量靶上。
该激光光点经过光学系统成像于高精度PSD上,PSD输出的信号经过炮控系统测试前端机处理后,经CAN总线传送到计算机中,计算机计算出光点的位置,入射光点的位置及数据可以在显示器上实时显示。
火炮身管运动时,激光光点的运动轨迹就显示在计算机屏幕上,根据相应的公式便可计算出炮控系统的静态参数。
其原理如图2所示。
图2 激光器+PSD测试系统原理图3.光纤陀螺光纤陀螺FOG(Fiber Optic Gyroscope),是利用光纤构成的萨格奈克(Sagnac)干涉仪[3],是一种纯光学、全固态陀螺仪。
一种高精度测量坦克炮塔动态转角的方法

一种高精度测量坦克炮塔动态转角的方法权贵秦;冯伟强;张建峰;于询【摘要】坦克炮塔相对底盘转角的测量精度直接决定了稳瞄系统与惯导系统的精度.目前,国内的主战坦克所配备的坦克炮塔,其相对底盘的转角测量装置的测量精度低,仅解决坦克车体的转向问题.针对稳瞄系统与惯导系统对坦克炮塔相对底盘转角的精度要求问题,提出了一种由光电定位系统、机械传动系统和旋转变压器组成的动态高精度测角装置,介绍了其工作原理和工作过程,对该测角装置进行光电自准直标定并对误差进行理论分析,最后通过上车实验证明该测角系统能够满足实际需求.实践证明:该测量系统能够在通电瞬间确认位置,具有绝对零位记忆功能,其测角精度为42″.%Tank turret rotation angle measurement accuracy relative to the chassis directly determines the precision of the stable sighting system and the inertial navigation system. At present, the main battle tank equipped with a tank turret in the angle measurement device which has low measurement accuracy relative to the chassis can solve the problem of steering the tank body only. This paper proposed a high-precision angle measurement device which was composed of location and orientation system, mechanical drive system and resolver. It firstly introduced the working principle and work process, followed by the angle measuring device calibration and the theoretical analysis of error, the final joint commissioning proved this angle measuring system met the actual demand. Results indicate that this measurement system can confirm the location when instantaneously powered and has absolutely zero memory function, the angular accuracy is 42\".【期刊名称】《应用光学》【年(卷),期】2012(033)002【总页数】6页(P321-326)【关键词】旋转变压器;光电定位系统;传动比;光电编码【作者】权贵秦;冯伟强;张建峰;于询【作者单位】西安工业大学光电工程学院,陕西西安710032;西安工业大学光电工程学院,陕西西安710032;西安应用光学研究所,陕西西安710065;西安工业大学光电工程学院,陕西西安710032【正文语种】中文【中图分类】TN202;TP391.4引言动态角度测量[1]的精度直接影响陆用车载武器、航空等领域中的跟踪、定位、打击、制导的准确性。
某新型火炮随动系统的性能测试系统设计

某新型火炮随动系统的性能测试系统设计摘要:提出一种新型火炮随动系统的性能测试系统设计,采用TMS320LF2407A DSP 作为火炮随动系统性能测试系统的核心,利用DSP 的捕获单元完成了随动系统跟踪速度的实时数据采集,并详细介绍CAN 总线通信模块的设计。
测试结果表明,该测试系统满足设计要求,效果良好。
关键词:DSP;CAN;随动;测试;TMS320LF2407A某新型火炮随动系统为数字式随动系统,用于驱动火炮炮塔,是整个自行高炮武器系统的核心部分。
火炮随动系统性能的优劣将直接影响防空武器系统的整体作战效果,因此必须进行随动系统性能参数的测试,以判定其是否满足性能指标的要求,为武器系统的保障维修提供依据。
这对保证装备处于良好状态、提高系统战斗效能、提高训练效果、降低维修成本、使部队尽快形成基本保障能力,都有重要意义。
本文利用DSP 和CAN 总线技术的良好性能设计了火炮随动系统性能测试系统。
数字信号处理器DSP 具有高速、强大的数据处理能力及丰富的外设资源,CAN 总线是一种多主串行通信协议。
可有效地支持分布式实时传输,具有较强的抗干扰能力。
将DSP 与CAN 总线技术相结合,系统的可靠性和实时性能也得到很大提高。
1 测试系统总体结构设计1.1 测试系统测试对象分析本设计要对角位移、跟踪速度和加速度3 个能够反映系统性能的重要参量进行准确实时的测量,从而正确评价火炮随动系统的性能。
角位移信号的变化情况反映了位置式随动系统的工作状态变化,角速度和加速度的大小也能反映出系统调转快速性和跟踪快速性的好坏。
根据火炮随动系统的内部结构可推知,方位、高低系统的跟踪速度和方位、高低执行电机的转速存在线性关系,对执行电机转速进行测试,再根据积分、微分运算就可以得到系统的角位移和角加速度,进而可对火炮随。
一种基于陀螺的炮塔转角动态高精度测量方法

一种基于陀螺的炮塔转角动态高精度测量方法
于洵;申双琴;徐岩;谢辉
【期刊名称】《国外电子测量技术》
【年(卷),期】2012(31)12
【摘要】针对稳瞄惯导一体化系统中,旋转炮塔相对底盘转角的测量问题,解决目前炮塔转角的动态、高精度、实时性测量存在的不足和限制。
文中在刚体姿态动力学、姿态测量技术理论基础上,提出基于微电子机械系统(micro-electromechanical systems,MEMS)陀螺、加速度计和磁传感器构建的转角测量系统,设计了基于四元数的姿态估计滤波器。
对测量装置进行试验和标定,结果表明:其在坦克内部复杂的
环境中,能有效抑制陀螺的随机漂移,满足技术要求,测量精度达80″.
【总页数】4页(P36-39)
【关键词】稳瞄惯导一体化系统;炮塔转角;MEMS陀螺;加速度计;磁传感器
【作者】于洵;申双琴;徐岩;谢辉
【作者单位】西安工业大学光电工程学院;中国兵器科学研究院;西安应用光学研究
所
【正文语种】中文
【中图分类】TB922
【相关文献】
1.基于磁悬浮控制力矩陀螺的航天器姿态高精度高带宽测量方法 [J], 王华;王平;任元;陈晓岑
2.基于陀螺和卫星定位组合的滚转角测量方法 [J], 王超;王永骥;霍鹏飞;周翔;杨小会
3.基于准直光束的高精度滚转角测量方法研究 [J], 郝雯霞;吕勇;李晓英;陈青山;耿蕊;张明珠
4.一种高精度测量坦克炮塔动态转角的方法 [J], 权贵秦;冯伟强;张建峰;于询
5.一种基于容栅编码器测量炮塔高精度动态转角的方法 [J], 于洵;马林;刘雪松;韩峰;薛小乐
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
炮塔转动参数检测系统设计作者:郭旻蔡振兴欧阳元兵
来源:《科教导刊·电子版》2019年第24期
摘要目前炮塔转动参数检测方法存在测量精度偏低、操作复杂、抗干扰能力差的缺点,我们设计了一种基于MEMS惯性测量单元的炮塔转动参数测量系统,系统由ARM主控单元,MEMS惯性测量单元,WiFi模块,存储模块组成。
通过在标准转台上的标定和在某型坦克上的实验,该系统满足测试精度要求,节省了人力物力,缩短了测量时间,满足实际应用的需求。
关键词转动参数非接触测量微机电系统炮控系统
中图分类号:TM935 文献标识码:A
0绪论
炮塔是安装在装甲车、坦克、舰艇上的瞄准发射武器系统装置,能够围绕水平轴做360度无死角旋转,并且能够做45度角的俯仰运动,具有两个自由度。
炮塔转动参数包括角速度量和角度量。
目前测量方法主要有CCD点光源法、PSD光学测量靶法、光纤陀螺法、电测法等。
这些测量方法在精度和测量灵活性上都有缺陷。
我们设计了一种基于MEMS惯性测量单元的炮塔转动参数测量装置,用来弥补上述测量方法的不足,以满足实际需求。
1测量原理
本系统主要测量的量是炮塔转动的角速度及角度,我们选用的惯性测量单元MEMS九轴传感器MPU9250。
它包括三轴16位高精度AD组成的陀螺仪,三轴16位高精度AD组成的的加速度计与三轴6位磁力计,以及一个可扩展的数字运动处理器DMP。
角速度的测量装置主要是陀螺仪,然后辅以加速计来进行修正。
角度的测量是通过陀螺仪、加速计和磁力计测量的数据信息进行融合得到的,融合后的角度即是姿态角(如图1所示),即x轴的俯仰角Pitch、y轴的滚转角Roll、z轴的偏航角Yaw。
测量时我们只需把传感器固定在炮管上,通过读取MPU9250输出的数据,即可得到炮塔转动的角速度及角度量,其中z轴得到的是炮塔水平方向的值,x轴得到的是炮塔垂直方向的俯仰值。
2系统方案设计
我们选用MEMS结构的惯性测量传感器件测量得到炮塔转动的角速度和角度数据,然后经由I2C通信总线传给测量单片机对数据进行转换和处理。
处理运算完成的数据可就地存储,并经由无线模块将数据实时发給上位机进行显示。
在整个测量过程中只需将测量装置放置在炮管上,不需要其他的辅助设备。
MEMS惯性测量单元属于非接触式传感器,这种测量方式对现有方式有很大的创新改进,使得测量进行便捷灵活。
测量数据的传输采用WiFi无线的形式,不需要硬件连线,便于在复杂、空间有限的调试现场进行测量。
炮塔在测试机动性能时,炮管振动剧烈,而且一旦炮塔的驱动电机开启会带来很强的电磁干扰,这对测量上会产生很大的干扰,形成噪声。
同时MEMS惯性测量传感器件也存在漂移的问题,积分会累计误差,所以得运用相应的滤波算法对数据进行处理。
为了减小误差,选用多片MEMS惯性测量传感器件进行采集数据,然后对同一时刻多片陀螺仪所采的数据进行比对复合,数据的处理及测量传感器的驱动由ARM单片机完成。
针对于不同的数据测量量采用不同的滤波方法,如角速度只需算术平均滤波便可以保证精度;而对于角度值测量,因为它的计算是由多个多轴传感器的数据进行融合运算得出,我们采用卡尔曼滤波进行处理,以达到精度要求。
系统框图如图2所示。
2.1系统硬件设计
系统主控芯片选用STM32F103ZET6,测量模块为JY-901,模块集成MPU9250,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时
运动姿态,姿态测量动态精度为0.1€?s,静态精度位0.01度,稳定性极高。
支持串口和I2C 两种数字接口输出。
串口速率2400bps-921600bps可调,I2C接口支持全速400K速率。
本装置采用无线方式与上位机通信,无线WiFi模块为HLK-RM04高性能、低成本UART-ETH-WIFI模块。
该模块是基于通用串行接口的符合网络标准的嵌入式模块,内置TCP/IP协议栈,能够实现用户串口、以太网、无线网(WiFi)3个接口之间的转换。
它能稳定可靠的把串口数据转成WiFi热点,并支持全双工工作模式。
工作时只需用平板、手机、PC机等平台安装好专门开发的上位机便可能实现显示和控制。
装置在完成一次数据的测量后,会实时(下转第279页)(上接第268页)的将所测得的数据显示在上位机上。
除了实时显示所测数据外,本装置自带有数据存储模块,要将每次测量的数据自动存储在TF卡中,这样便于后期对所测数据的分析和参数指标标定。
2.2系统软件设计
软件部分主要包含单片机的初始化、九轴MPU6050姿态传感器初始化以及数据读取等等,其中单片机的初始化包括时钟初始化、串口初始化时钟配置以及串口1和串口2的配置,所采用的语言是C语言,系统软件的设计主要是对算法解算、数据融合以及通过串口传输数据。
系统的软件设计框图如图3所示。
3总结
我们所设计的基于MEMS惯性测量单元的炮塔转动参数测量系统,解决了传感器的零漂和测量数据的突变、波动问题。
通过在标准转台上的标定和在某型坦克上的实验,该装置的测量动态精度为0.1€?s,静态精度位0.01度,稳定性高。
本装置操作简单、灵敏度高、成本较低、实用性强,能有效地提高测试精度,节省了人力物力,缩短了测量时间,满足实际应用的需求,具有很高的实用价值。
参考文献
[1] 张炎华,玉立端,战兴群,翟传润.惯性导航技术的新进展及发展趋势[J].中国造船,2008(10):134-140.
[2] 王春忠,杨忠国,荣明,王秋良,王钦钊.基于陀螺仪的坦克炮控稳定精度检测仪设计[J].传感器与微系统,2009,28(01):85-87.
[3] 李华,马晓军,臧克茂等.电传动坦克模糊控制器仿真研究[J].装甲兵工程学院学报,2002(06):45-49.
[4] 朱竞夫,赵碧君,王饮钊.现代坦克火控系统[M].北京:国防工业出版社,2003.。