车辆系统动力学计算机仿真 - 2014
计算机仿真技术在汽车ABS系统性能分析中的应用
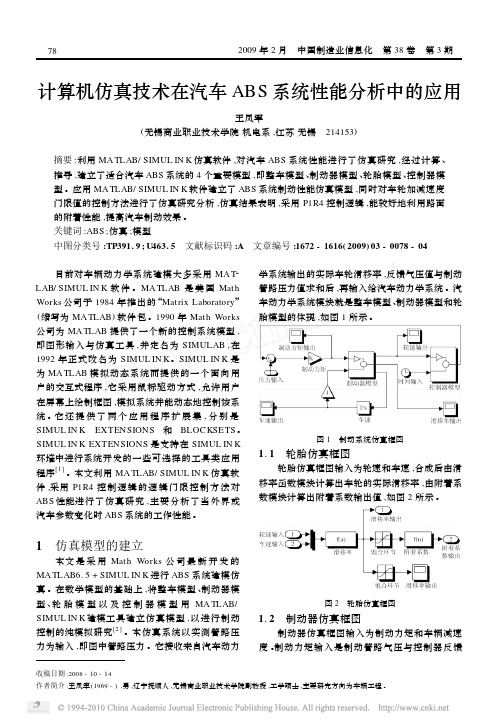
学系统输出的实际车轮滑移率 ,反馈气压值与制动 管路压力值求和后 ,再输入给汽车动力学系统 。汽 车动力学系统模块就是整车模型 、制动器模型和轮 胎模型的体现 ,如图 1 所示 。
图 1 制动系统仿真框图
1. 1 轮胎仿真框图
轮胎仿真框图输入为轮速和车速 ,合成后由滑 移率函数模块计算出车轮的实际滑移率 ,由附着系 数模块计算出附着系数输出值 ,如图 2 所示 。
2. 1 路面对汽车 ABS 系统性能的影响
本文研究了汽车在 4 种不同路面上的直线制 动情况 。仿真结果见表 1 。
表 1 50km/ h 空载仿真结果
制动效果
路面情况 干混凝土路 湿混凝土路 土路
结冰路
附着系数 0. 90~0. 75 0. 80~0. 70 0. 70~0. 65 0. 45~0. 25
由表 2 仿真数据可见 ,初速度越小 ,制动时间 越 ,制动距离越短 ,制动越平稳 。但车速增大后 , ABS 系统仍能较好地发挥作用 ,制动时间 、制动距 离都基本能控制在安全范围内 。另一方面 ,不同的 初速度应选择不同的门限值 ,初速度越大 ,所选门 限值的绝对值应越大 。
2. 3 载荷对客车 ABS 系统性能的影响
2 仿真结果分析
本文以国产中通 L C K6606D 豪华中型客车为 研究对象 。利用仿真模型 ,对影响汽车 ABS 系统 性能的不同因素 (路面 、初速度 、载荷等) 进行了仿
图 5 前轮车速和轮速 图 6 后轮车速和轮速
图 7 前轮滑移率 图 8 后轮滑移率
80
2009 年 2 月 中国制造业信息化 第 38 卷 第 3 期
目前对车辆动力学系统建模大多采用 MA T2 LAB/ SIMUL IN K 软 件 。MA TLAB 是 美 国 Mat h Works 公司于 1984 年推出的“Mat rix Laboratory” (缩写为 MA TLAB) 软件包 。1990 年 Mat h Works 公司为 MA TLAB 提供了一个新的控制系统模型 , 即图形输入与仿真工具 ,并定名为 SIMULAB ,在 1992 年正式改名为 SIMUL IN K。SIMUL IN K 是 为 MA TLAB 模拟动态系统而提供的一个面向用 户的交互式程序 ,它采用鼠标驱动方式 ,允许用户 在屏幕上绘制框图 ,模拟系统并能动态地控制该系 统 。它 还 提 供 了 两 个 应 用 程 序 扩 展 集 , 分 别 是 SIMUL IN K EXTENSIONS 和 BLOC KSETS。 SIMUL IN K EXTENSIONS 是支持在 SIMUL IN K 环境中进行系统开发的一些可选择的工具类应用 程序[1 ] 。本文利用 MA TLAB/ SIMUL IN K 仿真软 件 ,采用 P1R4 控制逻辑的逻辑门限控制方法对 ABS 性能进行了仿真研究 ,主要分析了当外界或 汽车参数变化时 ABS 系统的工作性能 。
汽车系统动力学仿真系统操作指南

汽车系统动力学仿真系统操作指南一.动力性计算1.当进入主界面时,先点击第一个提示为“整车参数”的红色车的图标,打开“基本参数输入”界面。
2.在“计算动力性、经济性所需参数”页面中,点击“选择变速器”右侧的图标,选择变速器类型,进入“变速器类型选择”界面,选中变速器类型后,单击“确定”按钮。
3.点击“选择车轮半径”右侧的图标,选择车轮半径,进入“请选择轮胎类型”界面,选中轮胎类型后,单击“确定”按钮。
4.单击“发动机外特性曲线几万有特性曲线数据文件”右侧的图标,选择结尾为“_wai”的文件。
注意:这个文件由外特性曲线和万有特性曲线组成,为保证软件的正确使用,外特性曲线文件通过点击主界面中“辅助文件”菜单下的“外特性曲线”进入“外特性曲线”界面,在此界面中创建获得;万有特性曲线文件可通过点击主界面中“辅助文件”菜单下的“万有特性曲线”进入“万有特性曲线”界面,在此界面中创建获得(推荐使用此方法),这两个文件必须选用同一个文件名。
这个数据文件也可直接在文档中输入数据生成,但应注意:文件中数据的输入方式最好由“辅助文件”菜单下的“外特性曲线”和“万有特性曲线”创建后,再进行修改,格式也应保持与文件pickup_wai.txt相同,即:第一部分为外特性曲线数据:第一行:“1”表示为外特性曲线第二行:“输入的记录个数:”+“”+下面所输入的记录的个数(应为整数)第三行:“发动机转速”+“”+“转矩”第四行及以下:“n”+“”+“Ttq”(n为发动机转速;Ttq为转矩。
且n从上到下应为从小到大排列。
)第二部分为万有特性曲线数据:第一行:“2”表示为万有特性曲线第二行:“输入的功率个数:”(或“输入的平均有效压力个数”或“输入的转矩个数”)+“”+“输入的转速个数”第三行:下面所输入的功率(或平均有效压力或转矩)记录的个数(应为整数)+“”+下面所输入的转速记录的个数(应为整数)第四行:“转速”第五行:“n1”+“”+“n2”+“”+ ……(注意:每两个转速数值之间必须用空格分开)第六行:“功率/燃油消耗率:”(或“平均有效压力/燃油消耗率”或“转矩/燃油消耗率”)第七行及以下:“pe1/t1”+“”+“pe2/t2”+“”+“pe3/t3”+ ……(pe1/t1、pe2/t2、pe3/t3 ……为燃油消耗量;且每两个燃油消耗量之间应用空格分开)5.在“选择动力性计算曲线”框中,选择您想计算的曲线,然后单击“动力性计算”按钮,进行动力性计算。
基于系统动力学的大连市出租车保有量预测

基于系统动力学的大连市出租车保有量预测左忠义;王克【摘要】采用系统动力学模型,找出影响出租车规模内外因素间的因果关系,包括经济、人口、机动车保有量、出行需求、政策等.在系统结构分析和因果反馈分析的基础上建立了出租车系统,以大连市出租车相关统计数据进行仿真计算,分析了不同的发展政策对出租车系统的影响,提出相应的建议和对策.【期刊名称】《大连交通大学学报》【年(卷),期】2015(036)004【总页数】4页(P10-13)【关键词】城市交通;规模预测;仿真计算;系统动力学;出租车;发展对策【作者】左忠义;王克【作者单位】大连交通大学交通运输工程学院,辽宁大连116028;大连交通大学交通运输工程学院,辽宁大连116028【正文语种】中文【中图分类】A城市出租车的保有量预测是一个十分复杂的问题,预测数量过大,会导致出租车空驶率增大,运营成本增大,进一步的浪费城市交通资源,同时增加了城市的交通污染状况;而预测量过少,会导致出租车运力过小,不能满足人们出行需求,导致打车难等诸多问题.城市出租车系统是一个复杂的、动态的系统,影响因素众多,各个子系统和各个变量之间都存在着复杂的反馈关系和非线性的相互作用,传统的研究方法难以全面描述其特征.目前,对出租车规模的预测方法主要有时间序列法、神经网络法以及回归分析法[1]、供需平衡法等[2].大多数研究考虑出租车系统的影响因素太少,对未来出租车规模没有定量的预测,通常只能依据经验提出宏观的指导性原则,不利于出租车的发展.鉴于出租车系统的复杂性和传统数量研究方法的缺陷,本文运用系统动力学的思想研究出租车规模的预测.影响一个城市出租车规模的因素很多,涉及到诸多方面.社会经济的发展和城市规模的扩大,诱发了更多的出行需求,出租车的市场需求也必将相应增长.城市出租车系统涉及因素多,复杂性强,采用一般传统方法难以进行系统性的量化分析,系统动力学能够很好解决这个问题.首先分析城市出租车系统,界定系统的边界,理清各组成要素及其因果关系.其次,根据分析的结果,建立出租车系统结构模型,构建系统流程图,设定方程式,建立量化分析模型.最后进行仿真计算,对出租车预测规模进行比较和评价.出租车系统的建模步骤如图1所示.2.1 出租车系统分析系统动力学方法是一种以系统内部信息反馈控制理论为基础、以实际系统为原型,以计算机仿真技术为手段、用于复杂系统定量研究的方法[3].系统动力学方法是通过建立反馈环和设定各种变量及方程实现的.它强调系统行为模式主要取决于其内部的动态结构和反馈机制,应用非常广泛.城市出租车系统是一个多变量、多反馈、非线性的复杂交通,受交通、社会、经济、政策等多种因素的制约[4],传统的交通预测模型难以模拟出租车系统复杂系统的动力机制.本文提出的出租车系统动力学模型包括人口、经济、机动车保有量、出行需求、出租车供给等多个子系统,各子系统之间的关系如图2所示.图2中箭头表示因果关系,正负号分别表示正反馈关系和负反馈关系.在这个系统中,经济发展子系统、人口子系统和出租车子系统是进行量化分析的基础,是影响城市出租车的核心因素[5].图2出租车系统因果关系图2.2 因果反馈关系(1)经济发展机动车数量出租车投放数量选择出租车出行出租车规模经济发展,正反馈,反映了经济发展能促进出租车的发展.(2)经济发展人口数量出行需求出租车需求出租车供需矛盾经济发展,负反馈,反映了出租车供需矛盾加剧,会阻碍经济发展.(3)出租车供给选择出租车出行出租车规模出租车运营公司收益出租车供给,正反馈,反映了出租车系统和出租车市场的自我调节功能.(4)机动车数量其他机动车数量其他方式出行出租车规模,负反馈,说明出租车与其他出行方式是竞争关系.2.3 系统动力学流图和方程构建出租车系统动力学流图和方程时,从系统中抽象出具有代表性的变量作为研究的变量.城市出租车系统用GDP、总人口数LZRK和出租车数LCZC作为每个子系统的状态变量,分别用GDP年增长量DGDP、年净增人口数DRK和出租车年增长量DCZ,其他变量均为辅助变量.在因果关系图和反馈分析的基础上,结合出租车系统的具体特点,城市出租车系统流图,即图3.根据系统流图,构建系统动力学方程,如下所示.状态方程:速率方程:辅助方程:本文以表1所示的大连市2009年~2012年的相关数据进行预测计算,主要研究大连市主城区的出租车规模,主城区由核心区和金州保税城区组成,约占全市总人口的46.9%.确定各影响系数时,主要运用SPSS软件统计分析并咨询有关专家.其中GDP年增长率和总人口年增长率根据对大连市的统计数据分析得到,利用SPSS软件对GDP、人口数、机动车数与出租车增长率的变化各自进行曲线拟合,得到影响系数的重要依据,再结合专家意见和实际情况进行修正,得到最终值,其他模型参数估计值见表2.本文选用2009年数据作为基准,因此可用2010~2012年的实际统计数据和预测数据进行检验模型的准确度,首先用GDP和大连市总人口数进行误差检验,相关结果见表3.从表3可以看出,人口数量预测误差绝对值的平均值为0.02%,精度相当高.GDP 由于物价上涨的缘故,误差比人口数预测误差要高,均值为3.5%,若换成同等价格的下的GDP,则2010年GDP值为5 089.2亿元,2011年为5 854.4亿元,2012年为6 783.56亿元,误差均值为0.45%,说明该模型预测结果准确度高.从图3和图4图像的趋势来看,也比较符合大连市近几年增长的趋势.因此输入主城区的人口数量,运用模型仿真2010~2012年大连市主城区出租车规模,结果见表4.该模型预测结果平均误差为3%,各年份误差均在5%以内,具有较高的精确度. 由于模型仿真结果的误差具有累积性,因此预测2013~2020年出租车规模时,以2012年的大连市主城区的实际数据和现有政策作为基准.大连市主城区未来几年大连市出租车的预测规模如图4所示.可计算出大连市主城区,按照现在的情况发展,到2015年,出租车规模是989 8辆,到2020年,出租车规模是13 531辆.图5中展示了不同的步长,仿真的图像也不同.其中,曲线1代表以1年为步长,曲线2代表以0.5年为步长,曲线3代表以0.25年,即一个季度进行仿真.从图中可以看出,如果以不同的时长发展大连市出租车规模,设定的发展速度也是不同的.从图像的趋势上也可以看出,未来的大连市出租车需求量还是很大的.因此,可认为在大连目前的经济水平和出租车行业的状况下,应该适当增加一部分出租车,鼓励出租车的发展,调整供给规模,对大连市出租车行业的发展是非常必要的.本文针对大连市出租车系统,建立系统动力学模型,对大连市出租车规模做出了合理预测.计算结果显示,该模型与大连市发展的趋势基本吻合,根据仿真结果,对大连市出租车规模发展提出了建议.大连作为旅游城市,应该大力鼓励出租车,并适度超前发展,有计划分阶段深入,保持稳定发展,达到良好的供需平衡状态.同时证明运用系统动力学模型预测出租车规模是可行的,在交通预测方面具有较好的适应性.本文对城市出租车系统的主要影响因素进行了初步探讨,建立更加全面反映主要影响因素及影响机理的系统动力学模型,仍需要进一步研究.【相关文献】[1]GARRIDO R A,MAHMASSAM H S.Forecasting Freight Transportation Demand with the Space-time Multinomial Probit Model[J].Transportation Research,Part B,2002,34(5):405-417.[2]陆建,王炜.城市出租车拥有量确定方法[J].交通运输工程学报,2004(3):92-95.[3]王其藩.系统动力学[M].北京:清华大学出版社,1998.[4]吴野.北京市出租汽车发展定位研究[D].北京:北京交通大学,2001.[5]王炜,陈学斌,陆建.城市交通系统可持续发展理论体系研究[M].北京:科学出版社,2004.。
汽车动力性计算机仿真

收稿日期 :2008203207 基金项目 : 交通部科技项目资助 (200439800060) ) ,女 ,吉林大安人 ,副教授 ,博士 . email :zyn @bit . edu. cn. 作者简介 : (1972 —
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
第 32 卷 第 6 期 北 京 交 通 大 学 学 报 Vol. 32 No. 6 2008 年 12 月 J OU RNAL OF B EIJ IN G J IAO TON G UN IV ERSIT Y Dec. 2008 文章编号 :167320291 ( 2008) 0620032206
316
1
∫F
u1
u2
t
δm du - Fw - Ff
( 5)
式中 : u 1 为汽车初速度 , km/ h ; u 2 为汽车末速度 , km/ h. 即对加速度倒数曲线进行积分 , 曲线下两个 速度区间的面积就是通过此速度区间的加速时间 , 如图 2 所示 . 在动力性计算时 , 一般忽略原地起步的离合器 滑磨时间 , 即假设最初时刻汽车已经具有起步挡位 的最低车速 . 换挡时刻则基于最大加速原则 , 如果相 邻挡位的加速度 ( 或加速度倒数 ) 曲线相交 , 则在相 交速度点换挡 ; 如果不相交 , 则在最大转速点对应的 车速换挡 . 113 最大爬坡度 根据汽车行驶方程式与驱动力 2行驶阻力平衡
2 仿真软件系统设计
运用 Matlab 中的 M 语言和 Simulink 模块建立 汽车燃油经济性数学模型 ,凭借 Matlab 强大的图形 用户界面 ( GU I) 功能以及图形功能 , 设计出汽车动 力性仿真系统 . 汽车动力性仿真模块如图 5 所示 .
探析计算机仿真5种方法在汽车工程中的应用
探析计算机仿真5种方法在汽车工程中的应用计算机仿真是利用计算机模拟复杂系统运行过程的一种方法,能够对系统进行分析、设计和优化。
在汽车工程领域,计算机仿真可以帮助工程师们更好地理解汽车系统的运行原理,并进行优化设计。
本文将探析计算机仿真在汽车工程中的应用,重点介绍5种方法的具体应用情况。
第一种方法是有限元分析(FEA)。
有限元分析是一种工程数值分析方法,通过将连续介质划分为离散有限元,然后进行力学计算来模拟实际结构的力学行为。
在汽车工程中,有限元分析广泛应用于汽车结构强度、刚度、振动、疲劳寿命等方面的研究。
汽车车架的结构设计和优化就需要进行有限元分析,以保证车辆的强度和刚度达到设计要求。
第二种方法是计算流体力学(CFD)。
计算流体力学是利用计算机对流体流动和热传递等问题进行数值模拟的一种方法。
在汽车工程中,CFD可以用于模拟汽车外形对气流的影响、发动机进气和排气流场分析、雨刷性能优化等方面。
通过CFD技术,工程师们可以优化汽车的空气动力学性能,提高燃油经济性和稳定性。
第三种方法是多体动力学(MBD)。
多体动力学是研究多个刚体或弹性体相对运动和相互作用的一种方法,其主要应用于模拟物体的运动和碰撞。
在汽车工程中,MBD可以用于模拟汽车悬挂系统的动力学特性、车辆稳定性和操控性分析、车辆碰撞事故模拟等方面。
通过MBD技术,工程师们可以更好地理解汽车的动力学行为,并优化汽车的悬挂系统和车辆稳定性。
第五种方法是虚拟样机技术(VIM)。
虚拟样机技术是利用计算机模拟实际产品的设计、组装和运行过程,以验证产品设计的可行性和性能。
在汽车工程中,VIM可以用于模拟汽车车身装配过程、车辆整车性能测试、汽车动力总成的虚拟仿真等方面。
通过VIM技术,工程师们可以在实际生产前,对汽车进行全面的虚拟测试,为产品的设计和生产提供可靠的参考依据。
计算机仿真在汽车工程中的应用具有重要意义,能够有效地帮助工程师们进行汽车结构设计、性能优化和系统整合。
基于汽车动力学性能的计算机仿真研究

基于汽车动力学性能的计算机仿真研究摘要:由于所有车辆投入市场之前都应该检测车辆动力性能,如同汽车车检系统,现阶段检测汽车动力性能最先进的是计算机仿真模拟检测。
本文在此背景下,简要分析汽车动力性能,剖析汽车动力性能计算机仿真检测系统工作原理,探讨计算机仿真模拟检测的优势,并且这一检测方式未来发展方向进行展望,以期能够为相关人员一定借鉴。
关键词:汽车;动力性能;计算机仿真由于汽车属于一种动力工具,为此,汽车动力性直接决定着车辆的好坏。
对于汽车动力性进行检测,绝对不能将其开到公路上实施,从车辆出厂的数量对对不能采取公路检测这样的方式。
为此,二十世纪五十年代以来,西方发达国家进行汽车动力性能仿真检测模型,随后在七十年通过工程学相关知识的应用,提到系统的检测方法论。
然而以往传统性的对汽车动力学性能进行检测的方法,必须等到生产出来一批汽车之后才可以选取实体样本开展检测,这样的检测方法就是对汽车进行抽查。
从现实情况来看,这样的检测方法还是选取实体汽车,对比之前的检测方法只是将检测地点从之前的公路上换到汽车制造厂里面。
计算机检测则是依托于特定检测程序之上,将汽车的各种组件具体数值录入之后,在电脑上面建立起来汽车模型。
随后通过虚拟现实技术的合理应用,以便能够使得一堆数据组成虚拟的“数字车”,还是立足于电脑模拟出来的虚拟行使环境,从而完成检测动力系统,这一技术从本质上则是属于一种计算机模拟程序,建构计算机虚拟检测环境是开展检测的重点。
1 汽车动力性能内容分析将汽车性能简单化,这也就是指把汽车当成动力工具所产生的使用效果,还是对车辆市值予以判断的一项十分重要的参考标准。
具体来说,汽车动力性能为以下内容:1.1 最高车速这项指标主要的是处于水平地面行驶状态之下汽车可以达到的最大行驶速度。
最高速度只是体现出汽车行驶极限,并不是显示汽车其自身质量好坏。
究其原因,这主要的我们现实生活场景之下,绝对不是《速度与激情》所体现出来的频繁的飙车,在一般情况下不会用到汽车最高车速。
汽车整体动力性MATLAB仿真计算ppt
02
汽车整体动力性概述
汽车整体动力性的概念与特点
汽车整体动力性是指汽车在良好路 面上行驶时所表现出来的快速、安 全、稳定和舒适的运动性能。它包 括加速性能、减速性能、操控性能 、行驶平顺性和燃油经济性等多个 方面。这些性能的优劣直接影响到 驾驶员和乘客的感受以及车辆的运 行效率。
VS
汽车整体动力性的特点可以概括为 以下几点:综合性、时变性、非线 性以及不确定性。这些特点使得汽 车整体动力性的研究变得复杂和困 难,需要通过仿真计算等方法来进 行分析和优化。
汽车整体动力性的研究现状与发展趋势
国内外学者对汽车整体动力性的研究已经开展了多年,取得了很多成果。目前,常用的研究方法包括 实车试验、仿真计算和理论分析等。其中,仿真计算因为具有高效、安全、低成本等优点而得到了广 泛应用。
在发展趋势方面,未来的研究将更加注重以下几个方面:智能化仿真、多学科协同、精细化建模以及 多目标优化。通过这些研究,可以进一步提高汽车的整体动力性能,降低能耗和排放,满足人们对安 全、舒适和环保等方面的需求。
参数设置
根据车型和实际工况,设置仿真计算的参 数,如高程差、非铺装路面阻力等。
仿真计算
进行仿真计算,得出SUV在给定工况下的 动力性能,如爬坡能力、脱困能力等。
结果分析
对仿真计算结果进行分析,为车辆优化设 计提供依据。
某型跑车整体动力性仿真计算
模型建立
建立跑车整车模型,重点考虑空气动力学效应和轻量化设计。
续的优化和改进提供可靠的依据。
03
MATLAB仿真计算方法
MATLAB仿真计算的概念与特点
概念
MATLAB仿真计算是一种基于数值模拟方 法的计算技术,通过构建数学模型并利用 计算机进行模拟实验,以实现对现实系统 或过程的逼真再现。
车辆系统动力学课件

11
Vehicle System Dynamics
1.3 车辆特性和设计方法
1、期望的车辆特性
● 操纵动力学:人为因素多(驾驶员)
评价:利用系统转向特性,开环评价和闭环评价(如图)
Open
Closed
2021/4/14 星期三
12
Vehicle System Dynamics
1.3 车辆特性和设计方法
47
轮胎模型
2021/4/14 星期三
48
轮胎模型
2021/4/14 星期三
49
第3章 轮胎动力学
概述 轮胎的功能、结构与发展 轮胎模型 轮胎纵向动力学 轮胎垂向动力学 轮胎侧向动力学
2021/4/14 星期三
50
轮胎纵向动力学
2021/4/14 星期三
51
轮胎纵向动力学
2021/4/14 星期三
2021/4/14 星期三
20
动力学方程的建立方法
2021/4/14 星期三
21
动力学方程的建立方法
2021/4/14 星期三
22
Hale Waihona Puke 动力学方程的建立方法2021/4/14 星期三
23
动力学方程的建立方法
2021/4/14 星期三
24
第2章 车辆动力学建模方法
动力学方程的建立方法 动力学方程的求解方法 从控制工程角度看动力学系统 处理动力学系统的方法和步骤
59
轮胎纵向动力学
2021/4/14 星期三
60
轮胎纵向动力学
2021/4/14 星期三
61
轮胎纵向动力学
2021/4/14 星期三
62
第3章 轮胎动力学
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CV=DV+(FI1*DA-FI*D1A)*VST
RETURN END
SUBROUTINE EXCH1(ZZC,VZC,AZC,DZZC,DVZC,DAZC,D1AZC,ND)
IMPLICIT DOUBLE PRECISION(A-H,O-Z) DIMENSION ZZC(ND),VZC(ND),AZC(ND) DIMENSION DZZC(ND),DVZC(ND),DAZC(ND),D1AZC(ND) DO 5200 I=1,ND,1 DZZC(I)=ZZC(I) DVZC(I)=VZC(I) D1AZC(I)=DAZC(I) DAZC(I)=AZC(I) ZZC(I)=0. VZC(I)=0. AZC(I)=0. 5200 CONTINUE RETURN
由此,当 k2 / m2 时,主系统的振幅为 B1=0,即主系统不再振动, 因此使建筑物 稳态振动振幅最小吸振系统应满足的设计 条件为: 2 k2 m2 ,即使得吸振器的固 有频率等于主系统的固有频率。
车辆系统的振动微分方程可以化为如下形式: } [C ]{X } [ K ]{X } {P} [M ]{X (1)
m1 0 1 c c x 1 k1 k 2 0 x c c x k m2 x 2 2 2 k 2 x1 m 2 e sin(t ) x k2 0 2
SUBROUTINE EXP2(DY,DV,DA,D1A,CY,CV) IMPLICIT DOUBLE PRECISION(A-H,O-Z) COMMON /EXPL/ VST,F1KC,FKC,FI1,FI VST2=VST*VST CY=DY+DV*VST+(F1KC*DA-FKC*D1A)*VST2
大型非线性动力学数值求解现状
Newmark β Houbolt 隐式法 Wilson θ Hiber Hghes 的α法和 法 积分法 Park 显式法四阶Runge Kutta法 中心差分法
隐式法特点: 无论对线性还是非线性问题,其数值稳定性一般较好; 时间积分步长便于选取(积分步长可以取得较大); 计算速度较慢(尤其是对于大型非线性问题)。 显式法特点: 经典的线性多步法中,不存在无条件稳定的显式法;
COMMON /EXPL/ step,F1KC,FKC,FI1,FI dimension zb1(nd),vb1(nd),ab1(nd)
dimension dzb1(nd),dvb1(nd),dab1(nd),d1ab1(nd)
open(11,file='rusta.dat',status='unknown') open(12,file='rustd.dat',status='unknown')
cmk=1.0e+6;dmp=2.0e+4
cbk=1.0e+7;dbp=2.0e+4
bm1=3250.0 bm2=2100.0 bim=3020.0 bl=2.5
F1KC=1.0 FKC=0.5 fi1=1.5 fi=0.5 step=1.0e-4
do i=1,nn,1 tt=dble(i)*step
时间积分步长不便于选取、稳定性和精度一般较差;
计算过程简单、速度效率高。
一、模型
2l m1 k m3 z3 m2 Iy c z2 z1
二、参数
m1 3250kg m 2100kg 2 2 I y 3020kg m k 0.3M N/m c 20kN s/m l 1.25m
zt2=0.05*sin(4.*pi*tt)
zt3=0.05*sin(4.*pi*tt) CALL EXP1(dzb1,dvb1,dab1,d1ab1,zb1,vb1,nd) ! 积分
CALL EXP2(dzb2,dvb2,dab2,d1ab2,zb2,vb2)
CALL EXP2(dzb3,dvb3,dab3,d1ab3,zb3,vb3)
END
一、无外加激扰(自由衰减振动)
M1加速度
10 5 0 -5 -10
k m3
2l m1 Iy c z3 m2 z2 z1
Acceleration m/s
2
0
1
2
Time/s
3
4
M1速度
m1
2l Iy c m3 z3 m2 z2 z1
8 4
k
Velocity m/s
0 -4 -8 0.0
fb2=cbk*(zb2-zt2)+dbp*vb2
fb3=cbk*(zb3-zt3)+dbp*vb3
ab1(1)=(-fm2-fm3)/bm1-gg
ab1(2)=0.5*bl*(fm3-fm2)/bim
ab2=(-fb2+fm2)/bm2-gg
ab3=(-fb3+fm3)/bm2-gg
if(mod(nn,800).eq.0)then write(11,100) tt,ab1(1),ab2,ab3,zt2 write(12,100) tt,zb1(1)*th,zb2*th,zb3*th,zt3 end if CALL EXCH1(zb1,vb1,ab1,dzb1,dvb1,dab1,d1ab1,ND) CALL EXCH2(zb2,vb2,ab2,dzb2,dvb2,dab2,d1ab2)
车辆系统动力学计算机仿真
假设Mb为车体质量,Mc 为附加质量块,列车运行 速度为V,如何设置相关 参数使得车体振动完全静 止?
本题实际上是一个反共振问题,动力吸振器包括质量
m2 、弹簧 k 2 , m1 与 k1 是主系统的质量及弹簧刚度,偏
心质量引起的机械垂向振动力为 m 2 e sin(t ) 。 由此 不难得到系统的强迫振动方程为:
0.06 0.04 0.02 0.00 -0.02 -0.04 -0.06 0 1 2 3 4 5 6
激扰
0.06 0.04
Y Axis Title
0.02 0.00 -0.02 -0.04 -0.06 0 1 2 3 4 5 6
激扰(8)
60 30
Y Axis Title
0 -30 -60
0
{X } { X }(或{ V })
[M ] [C ]
[K ]
系统的广义位移矢量 系统的广义速度矢量 系统的广义加速度矢量 质量矩阵 阻尼矩阵 刚度矩阵
X { }(或{ A })
} [C ]{X } [ K ]{X } {P} [M ]{X
(1)
{P}—系统的广义载荷矢量,一般难于显式表示, 往往是与广义位移和广义速度有非线性过程量。 • 这是一个非线性动力学微分方程。
END
SUBROUTINE EXCH2(ZZC,VZC,AZC,DZZC,DVZC,DAZC,D1AZC) IMPLICIT DOUBLE PRECISION(A-H,O-Z) DZZC=ZZC DVZC=VZC D1AZC=DAZC DAZC=AZC
ZZC=0.
VZC=0. AZC=0.
RETURN
(轮轨间具有Hertz非线性接触、非线性悬挂系 统、轮轨接触几何关系非线性)
• 目前,求解这类问题,只能采用直接数值积 分法
s s0 v0 t 1 / 2a t 2 v v0 a t
sn1 sn vn t 1 / 2an t 2 vn 1 vn an t sn 1 sn vn t (1 / 2 )an t 2 an1 t 2 vn1 vn (1 )an t - an-1 t
DIMENSION DY(ND),DV(ND),DA(ND),D1A(ND),CY(ND),CV(ND)
VST2=VST*VST DO 700 I=1,ND,1
CY(I)=DY(I)+DV(I)*VST+(F1KC*DA(I)-FKC*D1A(I))*VST2
CV(I)=DV(I)+(FI1*DA(I)-FI*D1A(I))*VST 700 CONTINUE RETURN END
0.5
1.0 Time/s
1.5
2.0
二、外加激扰(相同频率)
x2 (t ) 0.05 sin(4t ) x3 (t ) 0.05 sin(4t )
0.06 0.03
Y Axis Title
0.00 -0.03 -0.06
0
1
2
3
X Axis Title
4
5
6
激扰(1)
2l
加速度(M1)
三、激扰
x2 (t ) 0.05 sin(4t ) x3 (t ) 0.05 sin(6t )
implicit double precision (a-h,o-z) parameter(nn=40000,nd=2,gg=9.81,pi=3.14159)
parameter(th=1000.)
由此可以得到稳态响应的振幅为
k1 k 2 m 1 2 B1 k 2 k1a m 2e k 2 m 2 2 ( ) 2 B k k m k2 0 2 2 2 2
1
2 () (k1 k2 m1 2 )(k2 mห้องสมุดไป่ตู้ 2 ) k2
CALL EXCH2(zb3,vb3,ab3,dzb3,dvb3,dab3,d1ab3)
end do 100 format(1x,f12.5,2x,f12.5,2x,f12.5,2x,f12.5,2x,f12.5) stop end