电动机制动方法
三相异步电机的制动

摘要近几十年来,随着电力电子技术、微电子技术及现代控制理论的发展,中、小功率电动机在工农业生产及人们的日常生活中都有极其广泛的的应用。
特别是在乡镇企业及家用电器中,更需要有大量的中、小功率电动机。
由于这种电动机的发展及广泛的应用,它的使用、保养和维护工作也越来越重要。
电机是现代工农业生产和交通运输的重要设备,与电机配套的控制设备的性能已经成为用户关注的焦点。
电机的控制包括电机的起动、调速和制动。
异步电动机由于具有结构简单、体积小、价格低廉、运行可靠、维修方便、运行效率较高、工作特性较好等优点,因而在电力拖动平台上得到了广泛应用。
据统计,其耗电量约占全国发电量的40%左右。
当电机并入电网时,电机转速从静止加速到额定转速的过程称为电机的起动过程。
异步电动机的起动性能最重要的是起动电流和起动转矩。
因此在电机的起动过程中,如何降低起动电流,增大起动转矩,一直是机电行业的专家们探讨的重要课题。
电动机机应用广泛,种类繁多、性能各异,分类方法也很多。
本文是对三相异步电动机做出深入的剖析与设计。
三相异步电动机是一种具有高效率、低磨损、低噪声的电机机种.本设计在介绍三相异步电动机中,关于相数、极数、槽数及绕组连接方式的选择方法和应遵从的规律详细的加以说明和介绍。
文中主要介绍了几种常用的制动方式的特点,对不同制动方式进行了技术比较,分析了他们各自的实用场所,为实际应用提供了科学的理论依据。
关键词:三相异步电动机结构制动方式前言电动机是把电能转换成机械能的设备。
近几十年随着科技的发展电动机在机械、冶金、石油、煤炭、化学、航空、交通、农业以及其他各种工业中,被广泛地应用着。
随着工业自动化程度不断提高,需要采用各种各样的控制电机作为自动化系统的元件,人造卫星的自动控制系统中,电机也是不可缺少的。
此外在国防、文教、医疗及日常生活中(现代化的家电工业中)电动机也愈来愈广泛地应用起来与单相电动机相比,三相异步电动机运行性能好,并可节省各种材料。
电机制动原理

电机制动原理
电机制动是指利用电动机的反电动势来制动机械设备的一种工作方式。
在实际
工程中,电机制动广泛应用于各种场合,如电梯、风力发电机、电动汽车等。
本文将介绍电机制动的原理及其应用。
首先,电机制动的原理是利用电动机的反电动势来制动机械设备。
在电机制动时,电动机不再提供动力,而是将机械能转化为电能,通过电机的反电动势来制动设备。
当电动机停止供电时,转子的惯性使其继续旋转,此时电动机的绕组将产生反电动势,反电动势的方向与供电时的电动势相反,大小与转子的转速成正比。
通过反电动势的作用,电机可以实现制动。
其次,电机制动的应用非常广泛。
在电梯系统中,电机制动可以实现电梯的平
稳停车,保证乘客的安全。
在风力发电机中,电机制动可以调节风力发电机的转速,保护设备不受损坏。
在电动汽车中,电机制动可以将汽车的动能转化为电能,实现能量回收,提高能源利用效率。
此外,电机制动还广泛应用于工业生产中的各种设备,如卷扬机、起重机等。
总之,电机制动是利用电动机的反电动势来制动机械设备的一种工作方式,其
原理是通过反电动势来实现制动。
电机制动在各个领域都有着重要的应用,可以实现设备的平稳停车和能量回收,提高设备的使用效率。
随着科技的不断进步,电机制动技术也在不断发展,将会在更多的领域得到应用。
电机抱闸制动原理

电机抱闸制动原理
电机抱闸制动是一种常用的制动方式,其原理是通过抱闸器施加力或产生电磁吸力来制动电机。
在电机抱闸制动系统中,通常包括电机、抱闸器、电源和控制装置等组成部分。
当需要制动电机时,控制装置发送制动信号,通过电源给抱闸器施加电流。
抱闸器接收到电流后,产生电磁力或机械力,将制动蹄片与刹车盘接触或夹紧,实现制动效果。
具体来说,电机抱闸制动可分为两种类型:电磁抱闸制动和机械抱闸制动。
电磁抱闸制动是利用电磁力来实现制动效果。
当给抱闸器施加电流时,抱闸器内部的线圈会产生磁场,磁场与电磁铁之间产生吸引力,将制动盘和抱闸器连接在一起,实现制动效果。
当不需要制动时,停止给抱闸器供电,磁场消失,制动盘和抱闸器之间的连接断开,电机恢复正常运转。
机械抱闸制动是通过机械原理来实现制动效果。
当给抱闸器施加电流时,电磁铁内的线圈产生磁场,将制动盘和抱闸器连接在一起。
同时,由于机械结构设计,制动蹄片与刹车盘之间会产生摩擦力,进一步增大制动效果。
停止给抱闸器供电后,磁场消失,制动盘和抱闸器之间的连接断开,摩擦力消失,电机恢复正常运转。
总之,电机抱闸制动通过给抱闸器施加电流,利用电磁力或机械力将制动盘与抱闸器连接,实现电机制动效果。
这种制动方式操作简单、制动效果可靠,广泛应用于各种电动机的制动系统中。
电机学第五版课件汤蕴璆编著 第3章7直流电动机的起动、调速和制动
调速的方法
U I a Ra n Ce
磁场控制
9 调励磁电流调速
电机学
调速 Speed Governing
调速:调节转速、转速控制 电动机调速的基本要求
– – – –
n nN n1 t1 O t
调速范围:D=nmax/nmin 平滑性 经济性
调速设备简单、可靠、操作方便
10
电机学
If
18
电机学
直流电动机的反接制动
方法
励磁回路不变,将加在电枢回路的电 压反接。
-U=Ea+Ia(Ra+RL) Ia=-(U+Ea)/(Ra+RL) 将产生很大的制动性质的电磁转矩。
原理
19
电机学
直流电动机的反接制动
+ U 电动
Q 制动 B n0
n A
Ra
Ia
RL I’a + Ea –
n Ia1
If3
ia
n0
O
If1>If2>If3
If2
If1 TeN Te
IaN n1 nN
O
Te=CTΦIa
n
13
t
电机学
串励电动机的调速
n n
TL
Rs1<Rs2<Rs3 Rs1 Rs3 O Rs2 Te O
TL U1>U2>U3 U1 U3 U2 Te
调速方式 改变Rs 改变U
14
主要优点 简单 转速可调低、可调高
他励和并励电动机的调速 ▲电枢回路串电阻调速
n
n0 RΩ=0
IaN nN n1
他励直流电动机的制动
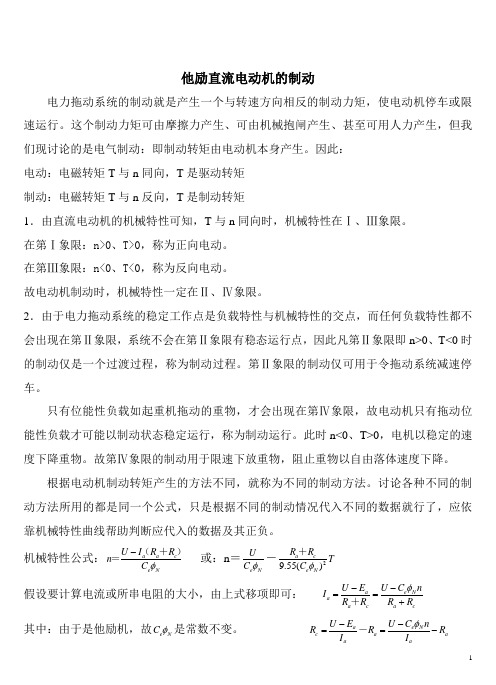
他励直流电动机的制动电力拖动系统的制动就是产生一个与转速方向相反的制动力矩,使电动机停车或限速运行。
这个制动力矩可由摩擦力产生、可由机械抱闸产生、甚至可用人力产生,但我们现讨论的是电气制动:即制动转矩由电动机本身产生。
因此:电动:电磁转矩T 与n 同向,T 是驱动转矩制动:电磁转矩T 与n 反向,T 是制动转矩1.由直流电动机的机械特性可知,T 与n 同向时,机械特性在Ⅰ、Ⅲ象限。
在第Ⅰ象限:n>0、T>0,称为正向电动。
在第Ⅲ象限:n<0、T<0,称为反向电动。
故电动机制动时,机械特性一定在Ⅱ、Ⅳ象限。
2.由于电力拖动系统的稳定工作点是负载特性与机械特性的交点,而任何负载特性都不会出现在第Ⅱ象限,系统不会在第Ⅱ象限有稳态运行点,因此凡第Ⅱ象限即n>0、T<0时的制动仅是一个过渡过程,称为制动过程。
第Ⅱ象限的制动仅可用于令拖动系统减速停车。
只有位能性负载如起重机拖动的重物,才会出现在第Ⅳ象限,故电动机只有拖动位能性负载才可能以制动状态稳定运行,称为制动运行。
此时n<0、T>0,电机以稳定的速度下降重物。
故第Ⅳ象限的制动用于限速下放重物,阻止重物以自由落体速度下降。
根据电动机制动转矩产生的方法不同,就称为不同的制动方法。
讨论各种不同的制动方法所用的都是同一个公式,只是根据不同的制动情况代入不同的数据就行了,应依靠机械特性曲线帮助判断应代入的数据及其正负。
机械特性公式:a a c e N U I R R n C φ-(+)= 或:n =e N U C φ-29.55()a c e N R R T C φ+ 假设要计算电流或所串电阻的大小,由上式移项即可: a e N a a c a c U E U C n I R R R R φ--==++ 其中:由于是他励机,故e N C φ是常数不变。
a e N c a a a a U E U C n R R R I I φ--==--一. 能耗制动实现:设电动机正在固有机械特性上正向电动运行,工作点A 。
电动机制动电路图和原理
电动机断电后,由于惯性作用,不会马上停止转动。
这种情况对于某些生产机械是不适宜的。
往往需要在电动机断电后采取某些制动措施。
制动的方法一般有两类,一是机械制动,二是电气制动。
1、机械制动利用外部的机械作用力使电动机转子迅速停止转动的方法称作机械制动。
应用较多的机械制动装置是电磁抱闸,它采用制动闸紧紧抱住与电动机同轴的制动轮来产生机械制动力。
由于结构上的区别,这种制动又有通电制动和断电制动两种方法。
即一种方法是电磁抱闸的线圈通电时产生制动作用,另一种方法是电磁抱闸的线圈断电时产生制动作用。
电磁抱闸的线圈虽然要受电源控制才能启动制动或解除制动,但制动力的产生和解除依赖于电磁抱闸装置的弹簧等机械结构,因此称作机械制动。
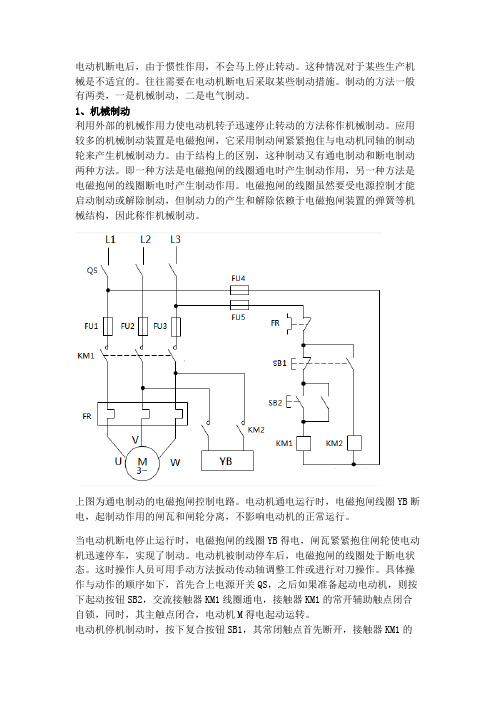
上图为通电制动的电磁抱闸控制电路。
电动机通电运行时,电磁抱闸线圈YB断电,起制动作用的闸瓦和闸轮分离,不影响电动机的正常运行。
当电动机断电停止运行时,电磁抱闸的线圈YB得电,闸瓦紧紧抱住闸轮使电动机迅速停车,实现了制动。
电动机被制动停车后,电磁抱闸的线圈处于断电状态。
这时操作人员可用手动方法扳动传动轴调整工件或进行对刀操作。
具体操作与动作的顺序如下,首先合上电源开关QS,之后如果准备起动电动机,则按下起动按钮SB2,交流接触器KM1线圈通电,接触器KM1的常开辅助触点闭合自锁,同时,其主触点闭合,电动机M得电起动运转。
电动机停机制动时,按下复合按钮SB1,其常闭触点首先断开,接触器KM1的线圈断电,常开辅助触点断开,KM1的自锁解除,主触点断开,电动机M断电停机;之后SB1的常开触点迅即闭合,接触器KM2线圈得电,主触点闭合,电磁抱闸线圈YB通电,电磁抱闸的闸瓦紧紧抱住闸轮使电动机迅速停车,实现制动。
电动机制动停转后,松开复合按钮SB1,接触器KM2线圈断电,电磁抱闸线圈YB断电,抱闸松开。
上图为断电制动的电磁抱闸控制电路。
它是在电源切断时才起制动作用,机械设备在停止状态时,电磁抱闸的闸瓦紧紧抱住闸轮使电动机可靠停车。
电动机制动的方法

电动机制动的方法
主要有以下几种电动机制动的方法:
1. 电阻制动:通过外接电阻将电动机的绕组短接,使电动机产生电流,通过对电流的调节可以实现制动效果。
2. 制动电阻器制动:将电动机转子的能量耗散成热量,通过调节制动电阻器的阻值控制制动力。
3. 逆变器制动:通过逆变器将电动机的运行频率调整为负值,使电动机反向运转,产生制动力。
4. 励磁制动:逆转电动机的励磁电流,产生制动力。
5. 机械制动:通过机械装置,如制动器或刹车盘,对电动机进行制动。
这些方法可以根据具体的应用场景和要求进行选择和组合,实现电动机的制动功能。
电动机能耗制动原理

电动机能耗制动原理
电动机能耗制动原理:电动机的定子绕组从交流电源上切断,并把它的两个接线端立即接到直流电源上(Y接时,接入二相定子绕组;△接时,接入一相定子绕组,另二相串联绕组接入),直流电流在定子绕组中产生一个静止的磁场。
由于机械惯性,转子仍在转动。
于是转子绕组感生电动势,并产生感应电流,电机就处于发电状态,其电磁转矩与转子旋转方向相反,起到制动作用。
能耗制动:电动机脱离三相交流电源后,定子绕组加一直流电压,即定子绕组通以直流电流,利用转子感应电流与静止磁场的作用达到制动目的。
能耗制动控制方式又分:时间原则控制——利用时间继电器控制速度原则控制——利用速度继电器控制
1.识图:(见图)
(1)电路组成:主电路、控制电路
(2)主要元器件:转换开关、熔断器、交流接触器、热继电器、电源变压器、按钮、时间继电器、二极管整流桥
(3)原理分析:主回路:合上QS→主电路和控制线路接通电源→变压器需经KM2的主触头接入电源(原边)和定子线圈(副边)控制回路:①起动:按下SB2→KM1得电→电动机正常运行②能耗制动:按下SB1→KM1失电→电动机脱离三相电源,KM1常闭触头复原→KM2得电并自锁,(通电延时)时间继电器KT得电,KT瞬动常开触点闭合。
→KM2主触头闭合→电动机进入能耗制动状态→电动机转速下降→KT 整定时间到→KT延时断开常闭触点断开→KM2线圈失电→能耗制动
结束。
注:KT瞬动常开触点的作用:如果KT线圈断线或机械卡住故障时,在按下SB1后电动机能迅速制动,两相的定子绕组不致长期接入能耗制动的直流电流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、能耗制动
电动机定子绕组切断三相电源后迅速接通直流电源。
感应电流与直流电产生的固定磁场相互作用,产生的电磁转矩方向与电动机转子转动方向相反,起到制动作用。
特点:是制动准确、平稳,但需要额外的直流电源。
2、反接制动
电动机停车时将三相电源中的任意两相对调,使电动机产生的旋转磁场改变方向,电磁转矩方向也随之改变,成为制动转矩。
注意:当电动机转速接近为零时,要及时断开电源防止电动机反转。
特点:简单,制动效果好,但由于反接时旋转磁场与转子间的相对运动加快,因而电流较大。
对于功率较大的电动机制动时必须在定子电路(鼠笼式)或转子电路(绕线式)中接入电阻,用以限制电流。
3、发电反馈制动
电动机转速超过旋转磁场的转速时,电磁转矩的方向与转子的运动方向相反,从而限制转子的转速,起到了制动作用。
因为当转子转速大于旋转磁场的转速时,有电能从电动机的定子返回给电源,实际上这
时电动机已经转入发电机运行,所以这种制动称为发电反馈制动。