风力发电机组控制系统设计-—最大功率点跟踪控制
基于PMSG风力发电系统的最大功率追踪控制

gnrt (MS )vc r o t lmaiu o e o trc gMPr eea r o P G; et nr ; x m pw r i ai ( P oc o m pnt n n
Ab t a t I h sp p  ̄ t i d se tt n d sg e h r r cp e f rte wi d p w rs s m a e n t e PMS n sr c : n t i a e h s is rai e i d t ewo k p n i l h n o e y t b s d o h o n i o e G ad
摘
要 : 立 了 以永 磁 同 步 发 电机 (MS 为 对 象 的 变 速 恒 频 风 力 发 电 系 统 , 导 了 d q坐 标 系 下 P S 的数 学 模 建 P G) 推 - MG
以及 双 P WM 电 能 变 换 器 的 控 制 策
Hale Waihona Puke 型 , 出 了风 力 发 电 系 统 中 的 功 率 控 制 、 速 控 制 与 最 大 功 率 追 踪 ( P ) 提 转 MP T  ̄
t e f me o k frt e s se i d c d t e P G mah mai d l n t e d q c o d n t s a d p t p t e c n r l tae h r a w r y t m, n u e h MS t e t mo e i h - o r ia e , n u h o t r t- o h c u o s g rt e w o e s se y f h h l y t m,i cu i g t e v co o t lo h MS o n l dn e tr c n r ft e P G,t e r a iain o h x i m o e o n r cn h o h e l t ft e ma mu p w r p i tta i g z o
变速恒频风力发电系统最大风能追踪控制
变速恒频风力发电系统最大风能追踪控制发布时间:2021-01-27T02:31:36.116Z 来源:《中国电业》(发电)》2020年第24期作者:王斌[导读] 文以变速恒频风力风电机组为例,对其最大风能追踪的总控制与矢量控制过程进行了分析。
甘肃龙源风力发电有限公司兰州 737000摘要:随着科技进步,社会不断发展,同时伴随着环境污染的严重,不可再生能源的减少,政府开始实行并坚持可持续发展战略,有效利用清洁能源,重点发展对可持续能源的利用,例如风能,水能,太阳能等。
伴随着风力发电的盛行,全面提升风力发电机组的运行可靠性和稳定性成为风力发电技术研究的热点问题,最大风能追踪控制成为研究的重点。
文以变速恒频风力风电机组为例,对其最大风能追踪的总控制与矢量控制过程进行了分析。
关键词:变速恒频;风力发电系统;最大风能追踪控制;可再生能源一、变速恒频风电机组1.1变速恒频风电机组风能已成为电力系统增长最快的绿色能源和全球发展最快的可再生能源。
变速恒频风电作为20世纪逐渐发展起来的全新的发电形式,其最大风能追踪控制成为了现在众多学者研究探讨的重要对象。
同时,在现代,变速恒频风电机组已经成为了主流的风力发电机组。
当风速处于额定风速以下时,对于变速恒频风电机组而言,尽可能的提高能量转换效率是主要的目标,这主要通过发电机转矩的控制,使机组变速运行来实现。
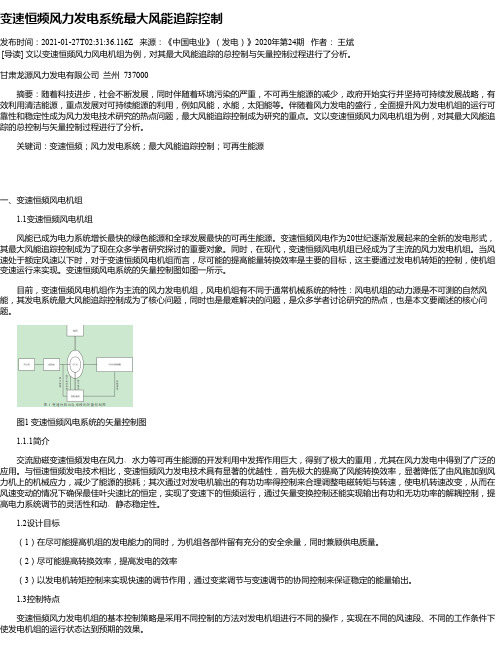
变速恒频风电系统的矢量控制图如图一所示。
目前,变速恒频风电机组作为主流的风力发电机组,风电机组有不同于通常机械系统的特性:风电机组的动力源是不可测的自然风能,其发电系统最大风能追踪控制成为了核心问题,同时也是最难解决的问题,是众多学者讨论研究的热点,也是本文要阐述的核心问题。
图1 变速恒频风电系统的矢量控制图1.1.1简介交流励磁变速恒频发电在风力﹑水力等可再生能源的开发利用中发挥作用巨大,得到了极大的重用,尤其在风力发电中得到了广泛的应用。
与恒速恒频发电技术相比,变速恒频风力发电技术具有显著的优越性,首先极大的提高了风能转换效率,显著降低了由风施加到风力机上的机械应力,减少了能源的损耗;其次通过对发电机输出的有功功率得控制来合理调整电磁转矩与转速,使电机转速改变,从而在风速变动的情况下确保最佳叶尖速比的恒定,实现了变速下的恒频运行,通过矢量变换控制还能实现输出有功和无功功率的解耦控制,提高电力系统调节的灵活性和动﹑静态稳定性。
风力发电系统中的风机控制策略研究

风力发电系统中的风机控制策略研究随着气候变化和能源需求的不断增长,风力发电作为一种可再生能源,在全球范围内得到了广泛应用。
然而,由于风力发电受风速变化、失速和悬停等因素的影响,风机的控制策略成为了提高发电效率和可靠性的关键。
本文将讨论风力发电系统中常用的风机控制策略,并从理论和实践角度探索其优势和挑战。
一、最大功率点追踪控制策略最大功率点追踪控制策略是风力发电系统中最常见的控制策略之一。
其核心思想是在不同的风速下调整风机的转速,以达到最佳发电效率。
为了实现这一目标,需要根据当前风速对风机的动力响应进行建模,并设计适当的控制算法来实时调整转速。
最大功率点追踪控制策略的优势是能够最大限度地提高发电效率,进而实现更好的经济效益。
然而,该策略在风速变化较快和失速等复杂气象条件下的性能仍然存在一定挑战,需要进一步的研究和改进。
二、失速控制策略失速是指风机叶片在风速超过一定临界值时失去升力而停转的现象。
为了避免失速对风力发电系统的影响,研究人员开发了一系列失速控制策略。
其中最常用的是变桨控制和液压刹车控制。
变桨控制通过改变叶片的角度来调整风机的升力系数,从而控制风机的转速。
液压刹车控制则通过施加刹车力矩来实现风机的停转。
这两种策略都能有效地应对失速现象,提高风力发电系统的可靠性和安全性。
然而,失速控制策略在实践中面临的主要挑战是如何准确地判断失速发生的时刻和风速,以及如何快速而精确地实施相应的控制措施。
三、风机群控制策略风机群控制策略是指通过协调多台风机的运行,以达到更高的风能利用率和系统可靠性。
在风力发电场中,通过合理地调整风机的发电功率和转速,可以实现风力资源的最优分配。
目前,常用的风机群控制策略包括功率间歇控制、功率分配控制和联合控制等。
功率间歇控制策略通过适时地启停风机来平衡发电功率和系统负荷之间的差距。
功率分配控制策略则根据风机的特性和电网负荷情况,动态分配风机之间的发电功率。
联合控制策略则将多台风机视为一个整体,通过相互之间的通信和协作来实现最优控制。
风力发电中的最大风能跟踪

返回
变步长爬山法的实现方法
谢谢!
在定桨距情况下,CP与 在不同的风速下成如下图所示的关系:
C POP
w
从图上可以看出,在定桨距情况下最大风能跟踪实质上就是控制发 电机组的转速。
三、风力发电最大风能跟踪技术简介
1.最佳叶尖速比法 当风速可测时,可以采用最佳叶尖速比法。根据风轮机功率特 性,可以事先确定每一风速下的最佳的叶尖速比λ*,然后实时测量 实际风速和机组转速,并调节发电机转速维持实际的λ 等于λ * ,从 而获得最大风能。但是由于风速的随机性和不确定性,实时测量风 速会增加系统的成本和实际执行的难度,其精度也难以保证。其控 制框图如下所示:
我们已知是叶尖速比和桨叶节距角的函数,即: CP ( , ) 在固定的 风速下,得到下面的风机特性曲线:
根据桨距角是否可调,风机又可分为定桨距和变桨距风机两种,在定 桨距风机中, 是不可变的,在风速一定的情况下,CP与 成单一的函数 关系,这样就可以简化我们的控制。
风力发电系统的运行区域:
双馈风力发电系统结构示意图
二、风力机的运行特性
一些基本概念 由空气动力学理论可知风机的输入功率(即通过风轮旋转面的风能)为:
其中: 为空气密度,一般为1.25kg/m3 ; Sw为风机叶片迎风扫掠面 积; 为空气进入风机扫掠面以前的风速。
1 Pv Swv3 2
v
考虑到风机的输入功率并不能被完全转化为主轴上的机械功率 Po , 引入风能利用系数:
传统的爬山法采用固定步长,当风速变化较快时,转速不能快 速地响应风速的变化;而风速波动较小时,又容易引起振荡。因此 在此介绍一种变步长爬山法进行最大风能跟踪控制,在传统固定步 长算法基础上,引入了随风速变化快慢而调整步长的机制。
无刷双馈风力发电系统的最大功率追踪控制策略研究
的转 速 n : 。 为
n 6 / p ( n )P / p p= P = 几 ± P () 2
=
() 3 () 4
即 m .
根据式 ( ) 3 ,可得出功率绕组的电频率为 2 、()
P n/ 0=n P ± 6 pp6 ( p P )/ 0±
由式 ( )可知 ,当转速 n 变化 时 ,只要适 当 4
、
调节控制绕组的输入电流频率 ,即可使功率绕组 输 出电频率 维持不变 ,从而 实现变速恒频发 电。
的 正确 性 和 有 效 性 。
关键词 :风力发 电;无刷 双馈 电机 ;变速恒频 ;矢量 变换控制 ;最大功率追踪
中 图 分 类 号 :T 1 M35 文 献 标 识 码 :A
0 引 言
在风力发 电系统 中,传统 的恒速恒频发电方 式 由于只能 固定 运 行 在 同步 转 速上 ,当 风速 改 变 时风力机就会偏离最佳运行转速 ,导致运行效率 下降 , 不但浪费风力资源 ,而且增大风力机 的磨 损¨ 。采用取消了滑环 电刷的 B F j D G变速恒频发
为实施 无 刷 双馈 发 电机 的矢 量 控制 策 略 ,需
要建 立无 刷双 馈 发 电机 在 定 子 同步 速 MT坐 标 系
下的数学模型,定子同步速 MT坐标 系与转子速
由 坐 标系关 系如 图 4和 5所示 。
g
该旋转磁场相对于功率绕组的转速 n 为:
n= +p p nr
第2 6卷第 4期
21 0 0年 4月
变速恒频风力发电系统最大风能追踪控制

变速恒频风力发电系统最大风能追踪控制摘要:风力发电是一种可再生能源,因此,对它的开发和利用显得尤为重要。
由于其实用、高效的特点,变速恒频风电技术在许多方面都具有很大的应用前景,并且伴随着风电技术的持续发展,它已经成为了国内外众多专家学者关注的焦点。
安全、低成本、高效的风电技术是风电技术发展的重点,而对其短时有效风速进行精确预测是实现风电系统平稳运行的关键与基础。
风电机组在运转过程中,其风场呈现出一种三维时变特性,由于各测点在风轮表面上得到的风速各不相同,因此,利用风速仪对其进行短时的风速预报并不可行。
为改善风电机组的调速性能,需对风电机组的短时风速预报进行深入的分析与研究。
关键词:变速恒频;风力发电系统;最大风能追踪控制1变速恒频风力发电概述本文介绍了一种新型的变频调速发电机的结构,并对其性能进行了分析。
双馈发电机的定子线圈与电网相连,转子线圈为三相交流变频驱动,一般采用交流-交流变换或交流-直-交变换来驱动。
双馈发电机可以在各种工况下工作,并且可以根据风速的改变来调节其旋转速度,从而保证风机始终处于最优的工作状态,提高了风力资源的利用效率。
当电机负荷或速度改变时,调整馈入转子绕组电流,就可以使定子的输出电压和频率不变,也可以调整发电机的功率因子。
2变速恒频风力发电技术重要性及其优势2.1变速恒频风力发电技术的重要性风力发电机是一种以风力为动力的风力发电机。
在整个风力发电过程中,发电系统占有相当的比重。
通常情况下,当风力发电系统的单位装机容量不断增加时,就可以从一个侧面说明风力发电机的结构存在一定的问题。
为此,需要对风力发电系统进行结构优化设计。
本项目研究成果将为风电机组的安全稳定运行提供理论依据,并为实现风电机组的高效稳定运行提供理论依据。
2.2变速恒频风力发电技术优势风力发电技术在风力发电中的应用具有明显的优势。
在风力发电的过程中,使用变速恒频的风力发电技术,能够从最大功率的角度来确保发电系统的平稳运转,不仅能够在某种程度上增加风电系统的发电量,还能够提升风电系统的运行效率。
风力发电系统最大功率追踪控制设计

风力发电系统最大功率追踪控制设计摘要风力发电系统是一种绿色、清洁的能源系统,具有深远的社会和经济意义。
为了提高风力发电系统的能量转换效率和稳定性,本文基于最大功率追踪控制理论,设计了一种基于模糊控制的风力发电系统最大功率追踪控制策略,研究表明该控制策略具有较好的控制效果。
关键词:风力发电系统;最大功率追踪控制;模糊控制AbstractWind power generation system is a green and clean energy system with profound social and economic significance. Inorder to improve the energy conversion efficiency andstability of wind power generation system, this paper designs a maximum power point tracking control strategy based onfuzzy control theory, which has better control effect according to the research.Keywords: Wind Power Generation System; Maximum Power Point Tracking Control; Fuzzy Control1. 引言随着能源危机不断加剧和环境问题日益突出,可再生能源得到了广泛的关注和研究。
风力发电是一种绿色、清洁的能源,具有广泛的应用前景和巨大的经济效益。
然而,由于风力发电机的风速、转速和负载变化等因素的影响,风力发电系统在实际运行中会出现能量损失和不稳定等问题,因此,提高风力发电系统的能量转换效率和稳定性,是当前研究的热点和难点问题[1]。
2. 风力发电系统最大功率追踪控制风力发电系统最大功率追踪控制是指在一定的风速和负载情况下,将风力发电机中的最大功率转化为输出功率的控制过程[2]。
直驱式永磁同步风力发电机最大功率跟踪的基本控制方法

直驱式永磁同步风力发电机最大功率跟踪的基本控制方法一、最大风能捕获控制的基本原理风能作用在风轮上,风能只有一部分可以被风轮吸收。
风力机从风能中捕获的功率Pw可表示为式中Pw——风力机从风能中捕获的风功率;ρ——空气密度;A——风力机扫风面积;v——风速;C p ——风力机的风能利用系数。
在桨距角一定的情况下,Cp是叶尖速比λ的函数,λ为式中ωw——风力机机械角速度;Rtur——风轮半径;v——风速。
在实际应用中常用风能利用系数Cp对叶尖速比λ的变化曲线表示该风轮的空气动力特性,如图7-4和图7-5所示。
图7-4 风轮气动特性(Cp-λ)曲线图7-5 永磁同步发电机不同转速从短路状态到开路状态的全特性曲线时就可以获得最大风能利当桨距角一定时,风力机运行于最佳叶尖速比λopt,此时风力机的转换效率最高,即用系数Cpmax式中ω——风力机的最优机械角速度;optλ——最佳叶尖速比。
opt成比例调节,以保持λ总在最优。
上式要求风轮机组的转速ω可以随风速v1在直驱式永磁同步风力发电系统中,风力发电机与风力机直接相连,风力发电机组的动态特性可以用一个简单的数学模型描述为——风力发电机组的转动惯量;式中Jtur——风力机的气动转矩;TturT——风力发电机电磁转矩。
em为风力机气动转矩Ttur其中式中ρ——空气密度;β——桨距角;CT——风力机转矩系数;Cp——风能利用系数。
稳态时,当风力机运行在一个最佳叶尖速比λopt 时,有一个最佳功率系数Cpopt与之对应,且转矩系数CT =Cpopt/λopt=CTopt也为常数,此时捕获的风能为最大,为式中S——风轮扫风面积。
稳态时,当忽略摩擦阻力转矩,发电机的电磁转矩应该与风力机气动转矩相等,即式(7-7)是在稳态条件下推导出来的发电机电磁转矩与转速之间的关系,它可以作为用于控制电机转矩的给定值,是发电机转速的函数。
即当风速在额定风速以下时,发电机的电磁转矩按照式(7-12)的关系控制,整个系统就能够实现最大风能的捕获,这就是额定风速以下最大风能捕获的基本原理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计说明书风力发电机组控制系统设计-最大功率点跟踪控制专业新能源科学与工程学生姓名喻绸绢班级能源121学号1210604122指导教师薛迎成完成日期2015年12月14日目录1。
控制功能设计要求 01.1任务 02。
设计 (2)2。
1 介绍对象(风力发电系统的最大功率点跟踪控制技术研究)2 2。
2控制系统方案 (2)2.2.1风力机最大功率点跟踪原理 (2)2.2.2风力机发电系统 (5)2。
2。
3风速变化时的系统跟踪过程 (10)3。
硬件设计 (12)4。
软件设计 (15)5.仿真或调试 (16)参考文献 (18)1.控制功能设计要求1.1任务能源与环境是当今人类生存和发展所要解决的紧迫问题而传统能源已被过度消耗,因此,可再生能源的开发利用越来越受到重视和关注,其中风能具有分布广、储量大、利用方便、无污染等优点是最具大规模开发利用前景的新能源之一。
目前,变速恒频风力发电系统已经广泛用于实际风机中,在低于额定风速的情况下根据风速变化的情况调节风机转速,使其运行于最优功率点,从而捕获最大风能;在高于额定风速时,通过对桨距角的调节,使风机以额定功率输出。
常用最大功率捕获方法主要有功率反馈法、模糊控制法、混合控制法等。
为了充分利用风能,提高风电机组的发电总量,本文分析风机特性及最大功率点跟踪(maximum pow er point tracking MPPT)工作原理。
众多的MPPT实现方法各有千秋,对于不同的应用场所各有所长,对于多种方案,需要进行大量细致的实验工作和数据分析。
风能是一种具有随机性、不稳定性特征的能源,风能的获取不仅与风力发电机的机械特性有关,还与其采用的控制方法有关。
在某一风机转速情况下,风速越大时风力机的输出功率越大,而对某一风速而言,总有一最大功率点存在。
只有当风力发电机工作在最佳叶尖速比时,才能输出最大功率.好的控制方法可使风轮的转速迅速跟踪风速变化,使风力发电机始终保持在最佳叶尖速比上运行,从而最大限度地获得风能.要保证最大限度地将捕获到的风能转化为电能,目前一般采用最大功率点追踪控制(MPPT)控制策略。
最大功率点跟踪(MPPT)是在可变风速条件下提高风力机能量转换效率的有效方法. 变速风电系统目前一般采用最大功率点追踪(Maximum Power Point Tracking,MPPT)的控制策略.2.设计2。
1 介绍对象(风力发电系统的最大功率点跟踪控制技术研究)双馈风力发电系统最大功率点跟踪通常基于实验测定的最佳风速.功率一转速曲线,但在长期运行中系统参数的变化会使实际最大功率点偏离原曲线,影响最大功率跟踪效果。
在分析风力机特性、双馈风力发电机数学模型及功率关系的基础上,提出了一种以向电网输出电能最大为目标、不依赖最佳风速.功率.转速曲线的最大功率点跟踪策略,实现了定子输出有功、无功解耦控制。
仿真和实验证明,基于该方法,双馈风力发电系统在风速变化过程中能自动寻找并跟随最大功率点,且控制相对简单,运行可靠,有较高的实用价值。
2.2控制系统方案2。
2。
1风力机最大功率点跟踪原理根据贝茨理论,风力机从风中捕获的功率为其中ρ表示空气密度,β表示桨距角,表示风力机的风能利用系数,R 是风轮的半径,ν表示风速,λ表示叶尖速比,ω为风力机的角频率(rad/s)。
风能利用系数与叶尖速比之间的关系如图 2—1 所示。
图2—1由上图可见,风能利用系数随着叶尖速比λ的变化而变化。
当时,即为风能利用系数的最大值。
而叶尖速比,在风速变化时,相应地调节风轮的转速就可以将叶尖速比维持在处,此时风能利用系数为最大值,风力机对风能的捕获量最大,即运行在最大功率点上.在不同的风速下,风力机的输出功率与风轮转速的关系,如图 2—2 所示,其中,P 表示风力机的输出功率,ω表示风轮的转速,ω1 、ω2 、ω3 分别为风力机在风速为υ1 、υ2 、υ3 时相应于最大输出功率P1 、P 2、P3的风轮转速.由图 2-4 可以看出,在风速一定的情况下,输出功率随着风轮转速的变化而变化,其中存在着一个与最大功率点相对应的叶尖速比,此时的风能利用系数为最大值。
在风速发生变化时,风力机最大功率点所对应的风轮转速也不同。
把不同风速下的风力机输出最大功率点相连,将得到一条曲线即为风力机的最大功率曲线。
为了提高风力机的效率,在风速发生改变时,就必须对风力机实行变速控制,使其始终运行在最大功率曲线上。
在风速变化时,通过调节风力机的转速,将叶尖速比维持在处,以确保风力机运行在最大功率曲线上,即为对风力机最大功率点的跟踪控制原理.图2—2 风力机输出功率与转速的关系图 2-3 为风速变化时,变速风力机对最大功率点的跟踪过程。
在风速为ν1 时,风力机运行于 A 点,为了追踪最大功率点 B,需要增加风力机风轮的转速ω。
图2—3 风力机工作点的变化当ω = ω1时,风力机运行于 B 点,A→B 的变化过程即为变速风力机在风速ν1 下,对最大功率点 B 的追踪过程。
当风速从ν1 增加到ν3 时,风力机的运行状态将从 B 点跳变到 C 点,同样为追踪该风速下的风力机的最大功率点,需要增加风力机转速ω,当ω =ω3时,风力机运行于对应风速ν3下的最大功率点 D 点,C→D 的变化过程即为变速风力机在风速ν3 下,对最大功率点 D 的追踪过程。
同理,当风速从ν3 下降到ν2 时,风力机的运行状态从 D 点跳变到E 点,而 E 点位于风速为ν2 时的风力机的最大功率点 F 点的右侧,所以应该减小风力机的转速ω直到ω = ω2,此时风力机运行在最大功率点 F 点.E→F的变化过程是风力机在风速为ν2 时,对最大功率点的追踪过程。
以上即为变速风力机在风速发生变化时对最大功率点的跟踪过程。
2。
2。
2风力机发电系统双馈风力发电机数学模型及能量关系同步旋转坐标系下的DFIG矢量方程双馈电机在三相静止ABC坐标系是一个多变量、强耦合、非线性高阶系统。
经过三相静止到两相旋转坐标变换后,同步旋转坐标系下的DFIG矢量模型如式(3)和式(4)所示。
u3=R s i s+pψs+jω1ψs u r=R r i r+pψr+jω3ψr (3)Ψr= Lmis+Lrir ψs=Lsis+Lmir (4)式中 u s, u r——定转子端电压矢量;i s, i r—-定转子绕组中的电流矢量;ψs, ψs—-定转子绕组中的磁链矢量;ω1-—发电机的同步角速度;ωs——转差角速度;L ms-—定子互感;L ls——定子漏感L1r-—转子漏感。
且 Lm=1。
5Lms;Ls=Lls+Lm;Lr=Llr+Lm。
根据式(1)和式(2)可得矢量形式的等效电路如图1所示。
图1 DFIG矢量形式的等效电路由于定子电压受到电网钳制,频率、幅值、相位基本不变,因此可忽略定子磁链动态变化过程, 将电压方程式(4)降阶为式(6)。
U s=R s i s+jω1ψs u r=R r i r+pψr+jωsψr (6)式(6)可作为变速恒频双馈电机风力发电矢量控制依据,按照不同的定向方式可以得到不同的控制方案。
DFIG 运行时的功率分析双馈电机由励磁电源和电网两边向电机供电,由图 4 和式(4)可得绕线式双馈电机输入总有功功率为P=P s+P r=Re[u s i*s]+Re[u r i*r]=R S|i s|2+R r|I r|2+Re[Pψs i*s+Pψr i*r]+Re[jw1ψs i*s+jw1ψr i*r]=P cu+P f+P e (8)式中P s——定子输入功率;P r——转子输入功率;P cu--定转子总的铜耗;P f-—磁场变化引起的功率变化;P e——电磁功率。
而电磁功率P e由定子电磁功率P es和转子电磁功率组成,将其展开为 dq 轴形式,可得P e=P es+P er=Re[jw1ψs i*s+jw1ψr i*r]=w1L m(i rd i sq-i rq i sd)-w s L m(i rd i sq-i rq i sd)=n p w r L m(i rd i sq—i rq i sd)(9)将式(8)代入式(9)可得P mech=n pωr L m(i rq i sd−i rd i sq)(10)系统次同步和超同步状态下的功率流动关系如图 4 所示。
图4 双馈电机的功率流动关系P es:P er:P mech=(1/(1-s)):(s/(1—s)):1式中s—-转差率。
由上式可见,在输入机械功率保持恒定时,转速的变化将直接改变定、转子输入的能量大小和流向。
降低转速,定子输出功率一定增大,但同时转子也吸收更多的功率;提升转速,定子输出能力下降,但是转子吸收功率也相应减少甚至向电网馈送能量。
因此双馈风力发电系统最大功率点追踪,就是要在一定风速下使定子与交流励磁电源总输出功率P out最大.P out与P mech关系如下:P out=P mech—P cus-P cur—P loss=P mech-R s(i sd2+i sq2)−R r′(i rd2)(12)2+irq式中p loss——变频器损耗;R r′——变频器损耗折合到转子侧后总的转子等效电阻。
所以在某一风速下须跟踪的最佳转速点并不是风能最大点对应的转速ωa,而是总输出功率最大点对应的转速ωb.且由于铜耗是电流的函数,因此总输出功率的大小及其对应的最佳转速不仅与有功电流有关而且与定子对电网进行无功补偿时输出无功功率的大小也有关系,但其单峰特性不变。
输入机械功率P mech扣除损耗后,可得到如图 5 所示的输出电功率P out曲线,其中Q out=0。
由图 3 和式(4)可得绕线式双馈电机输入无功功率关系Q s+Q r=Im(jω1ψs i s*)+Im(jωsψr i r*)可化简得sQ s+Q r=w s L s|i s|2+w s L r|i r|2=2w s L m|i s||i r|cosθ(13)式中θ——定、转子矢量的夹角。
图 5 机械功率与 DFIG 输出总功率关系图由式(13)可见,定、转子共同向电机提供无功功率,其大小与定、转子电流及电机电感量有关。
当定子单位功率因数发电时,电机所需的无功功率全部由转子电源提供;当定子向电网补偿容性无功时,转子不但要提供电机的无功功率而且需要提供额外的无功给定子作为补偿输出.但是转子变换器由于直流环节的存在,其电机侧无功Q r和网侧的无功Q g是解耦的,因此仍能保证输送到电网总的无功功率为零或者作容性补偿,其最大补偿量由转子励磁电源容量决定.综上所述,可以设计系统转速外环和无功功率外环,再结合所设计的转子内环控制器,可以实现转速与定子无功功率解耦控制,系统整体结构如图 6 所示。
图6 双馈电机定子电压定向最大功率点跟踪控制结构框图2。